Embed Size (px)
Citation preview
Active Shooter Tactical
Response Assistant
Design Slides
Team ASTRA: Ben McCall, Puja Patel, Joel Williams, Rohini Shah,
Aryan Toughiry
GMU Sponsors: Dr. Hintz & Dr. Wage
ASTRA1/28
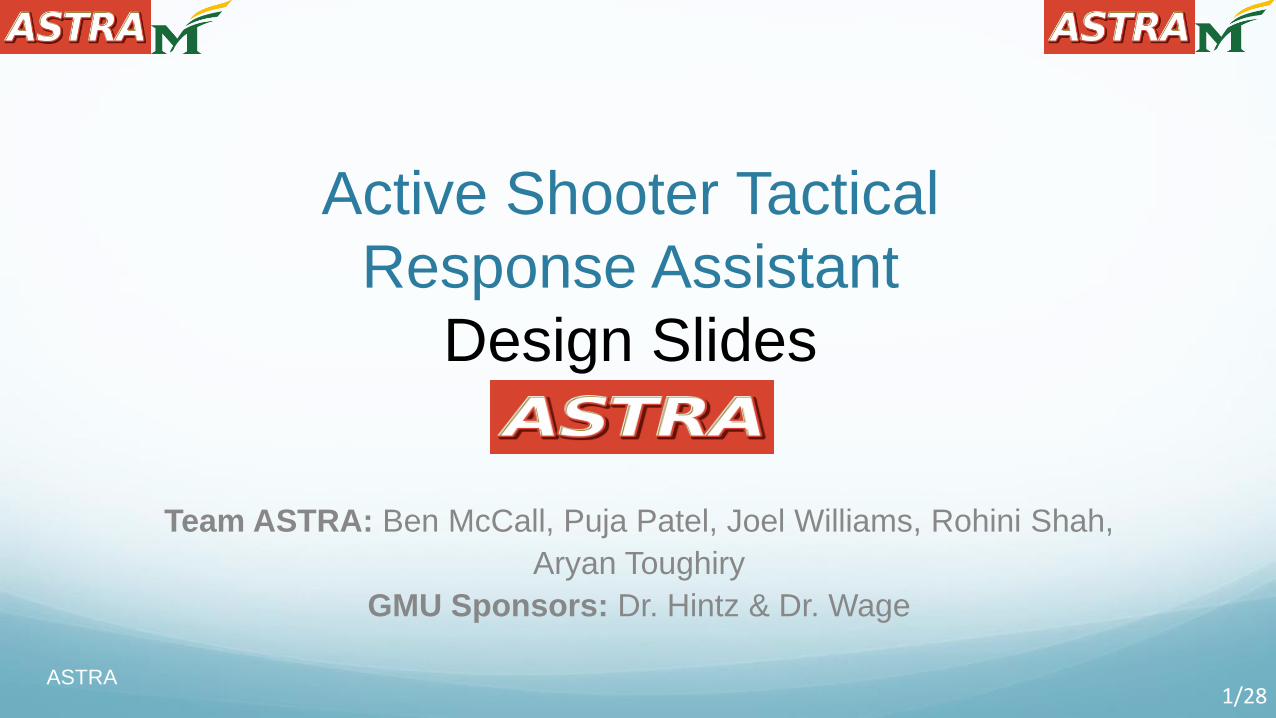
Network of nodes with microphone arrays.Nodes can detect and localize a gunshot in an outdoor area.ASTRA displays the location of a shooter on a map screen within seconds of the first shot.Provides law enforcement, emergency medical teams and first responders with critical information during a life-threatening event.ASTRA
2/28
Overview
ASTRA 3/28
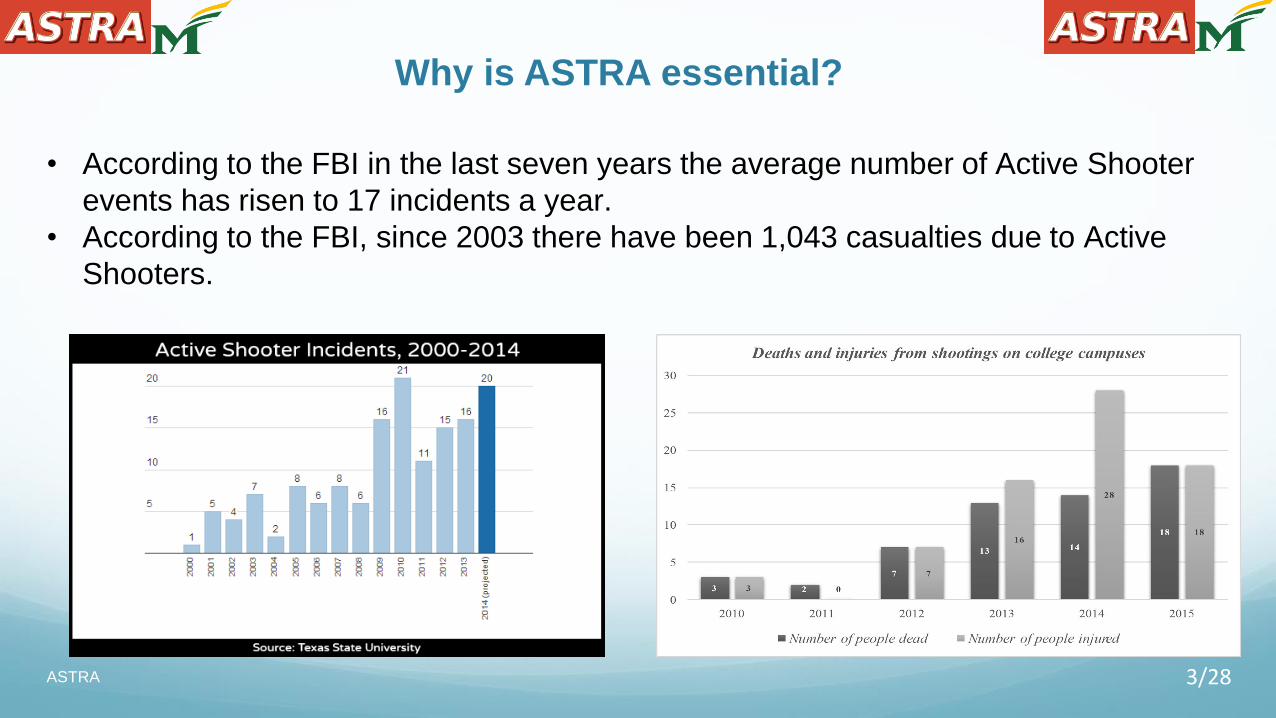
• According to the FBI in the last seven years the average number of Active Shooter
events has risen to 17 incidents a year.
• According to the FBI, since 2003 there have been 1,043 casualties due to Active
Shooters.
Why is ASTRA essential?
• ASTRA is comprised of a network of direction finding nodes and a data receiver
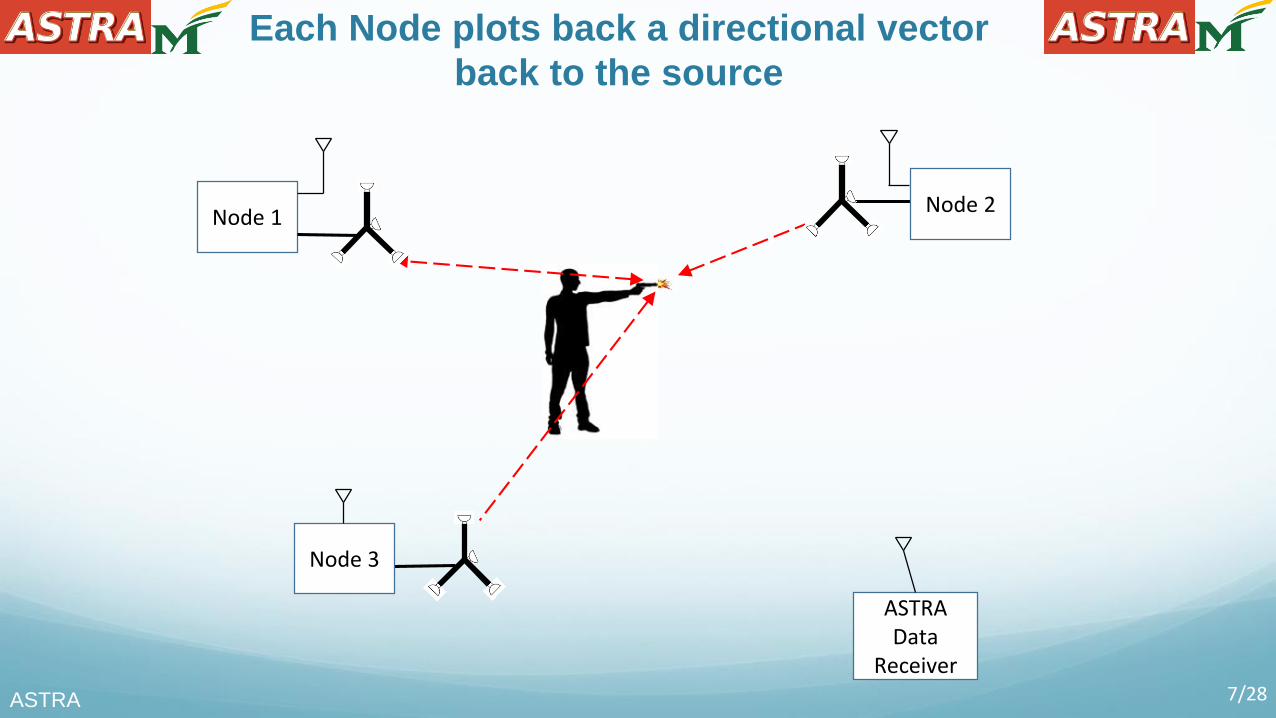
• Each node independently plots a vector to the shot
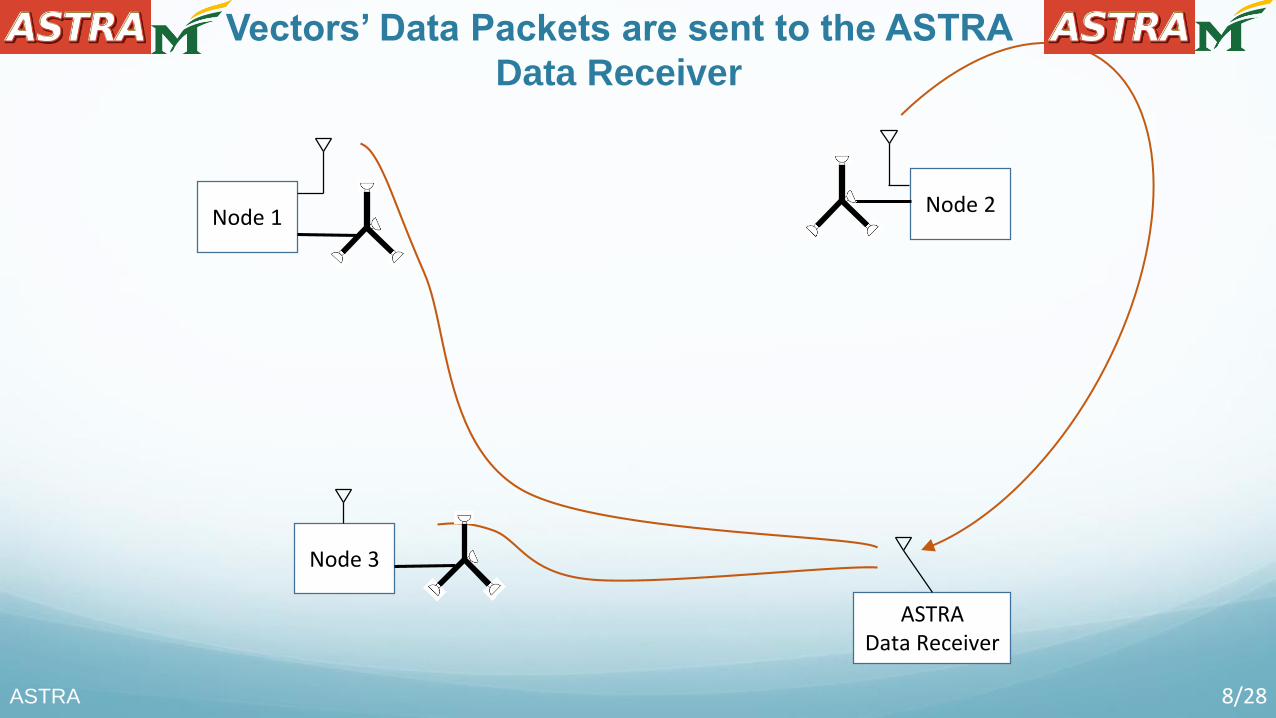
• The Data Receiver collects the vectors from each node and plots them on a map
ASTRA 4/28
ASTRA’s Functions
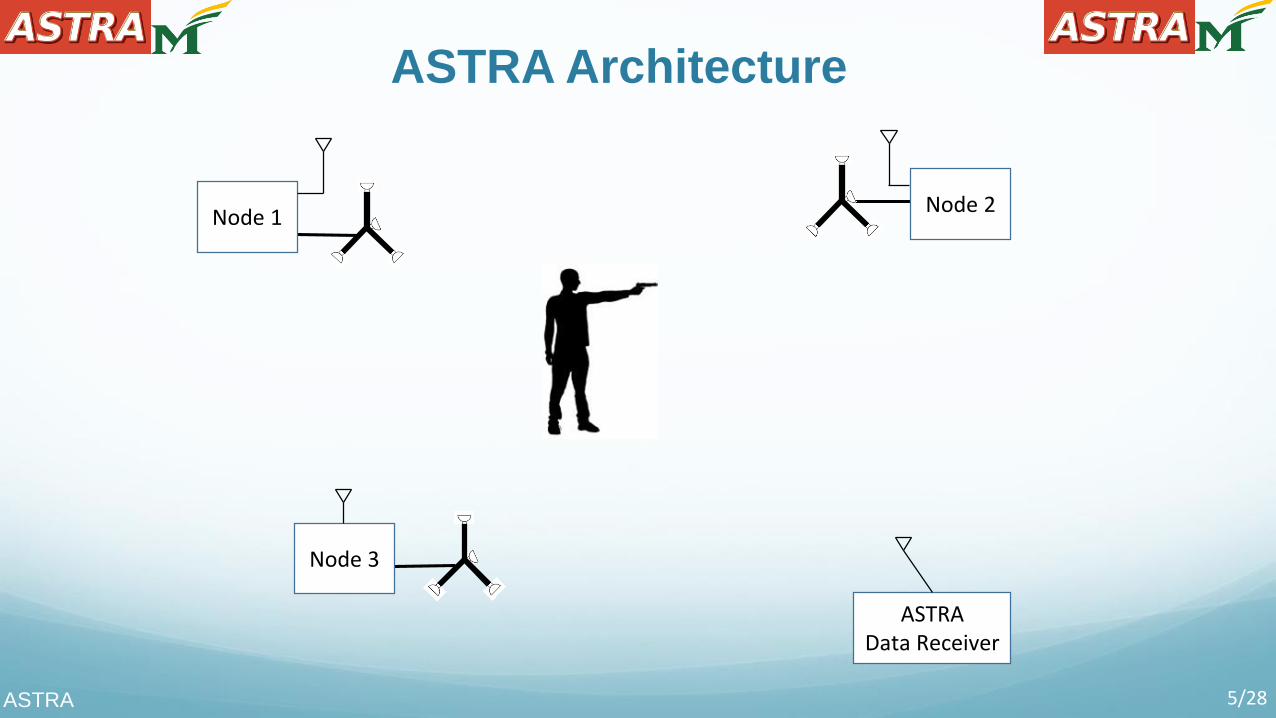
Node 1
ASTRAData Receiver
Node 3
Node 2
ASTRA 5/28
ASTRA Architecture
Node 1
ASTRAData
Receiver
Node 3
Node 2
ASTRA 6/28
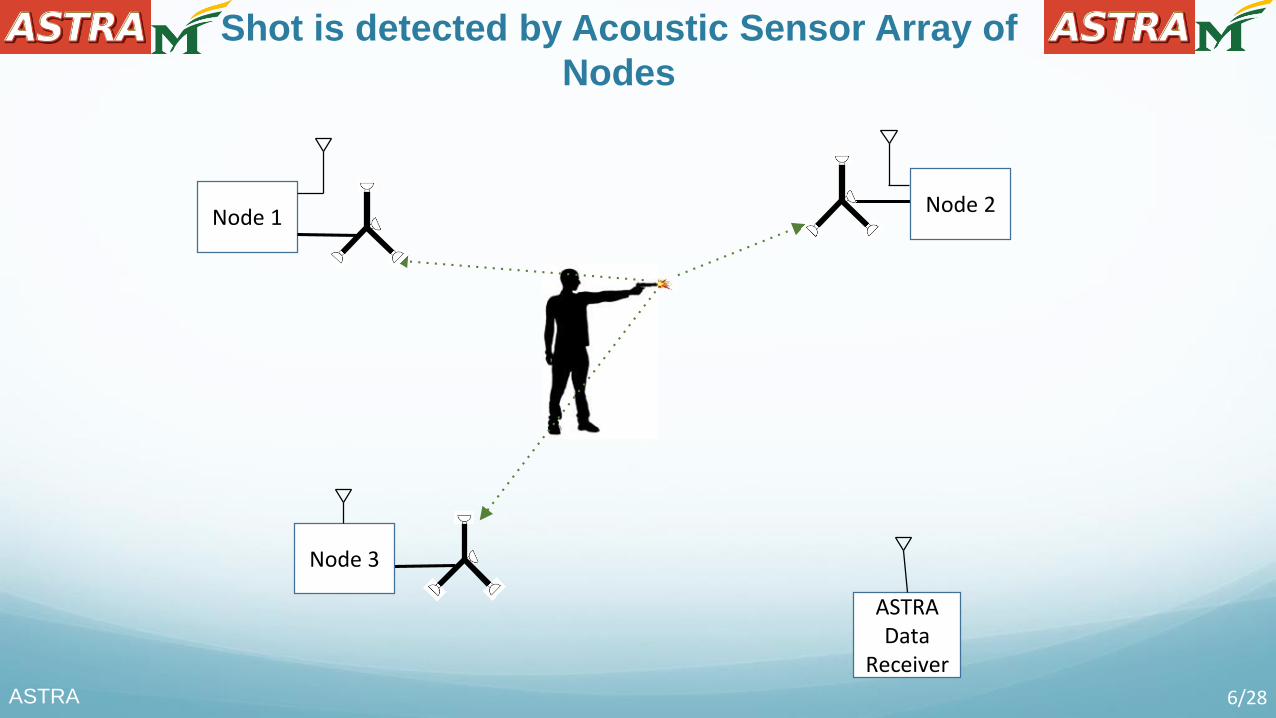
Shot is detected by Acoustic Sensor Array of
Nodes
Node 1
ASTRAData
Receiver
Node 3
Node 2
ASTRA 7/28
Each Node plots back a directional vector
back to the source
Node 1
ASTRAData Receiver
Node 3
Node 2
ASTRA 8/28
Vectors’ Data Packets are sent to the ASTRA
Data Receiver
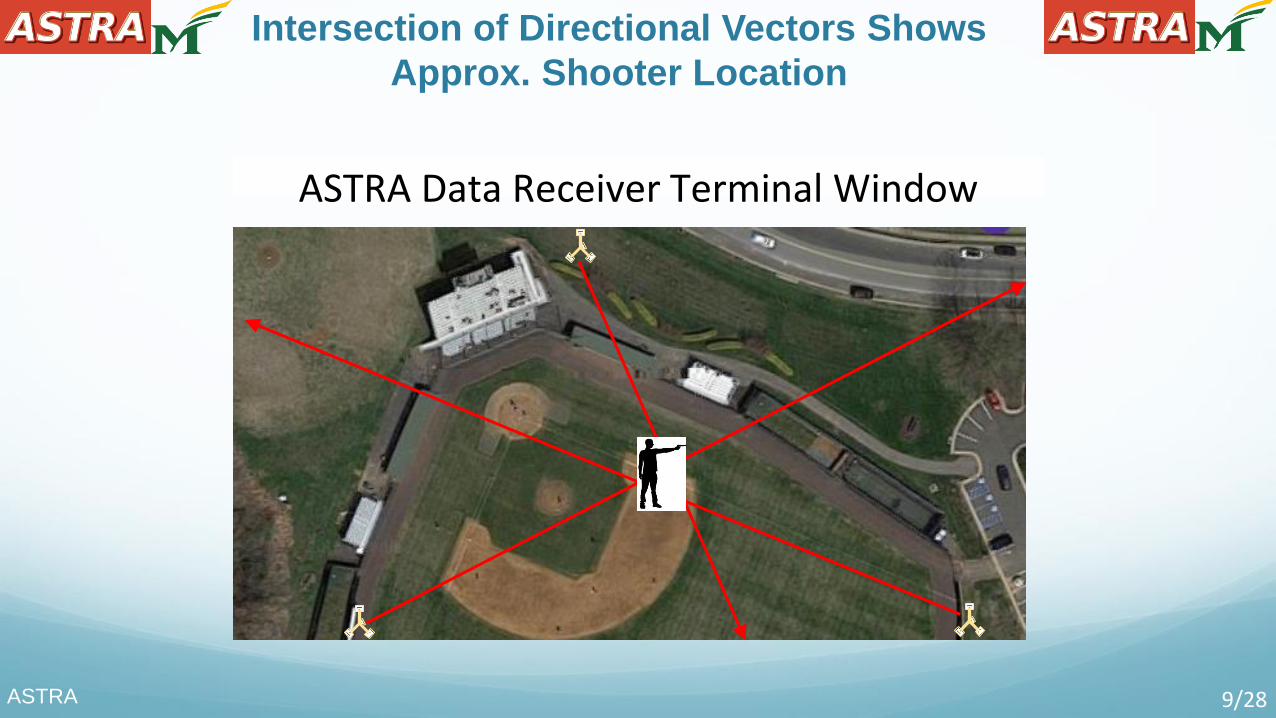
ASTRA Data Receiver Terminal Window
ASTRA 9/28
Intersection of Directional Vectors Shows
Approx. Shooter Location
The nodal network assumes an outdoor area with no physical obstruction between nodes (green field environment)
The shooter is assumed to be inside the geometric boundary that the network of nodes creates.
The amplitude of the environment noise will be no greater than 25% of the amplitude of our quietest test firearm.
ASTRA assumes there are no extreme weather conditions (i.e. high cold/hot, rain, wind) . Weather must be above 32 degrees F and below 100 degrees F. Wind must be less than 10 mph. Rainfall must be no greater than .10 inches per hour.
ASTRA 10/28
Technology and System Wide Requirements
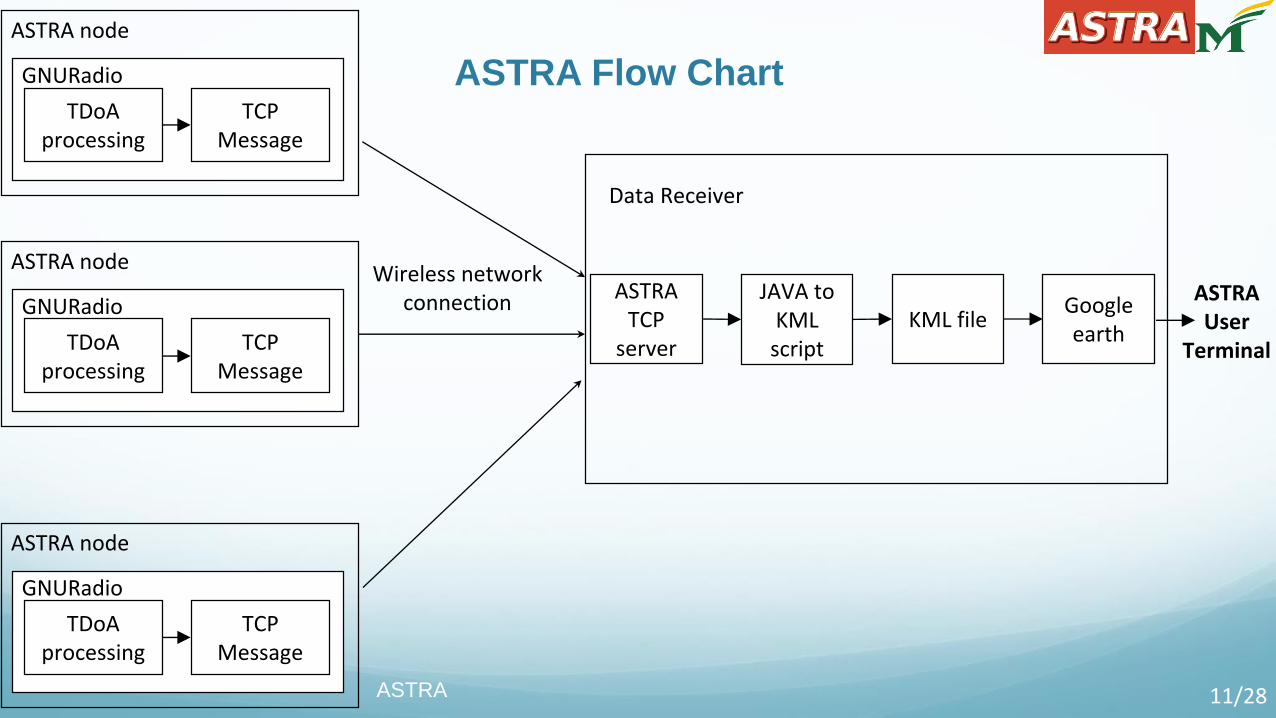
Google earth
Data Receiver
JAVA to KML
scriptKML file
ASTRA TCP
server
ASTRA node
TCP Message
GNURadio
TDoAprocessing
ASTRA node
TCP Message
GNURadio
TDoAprocessing
ASTRA node
TCP Message
GNURadio
TDoAprocessing
Wireless networkconnection ASTRA
UserTerminal
ASTRA 11/28
ASTRA Flow Chart
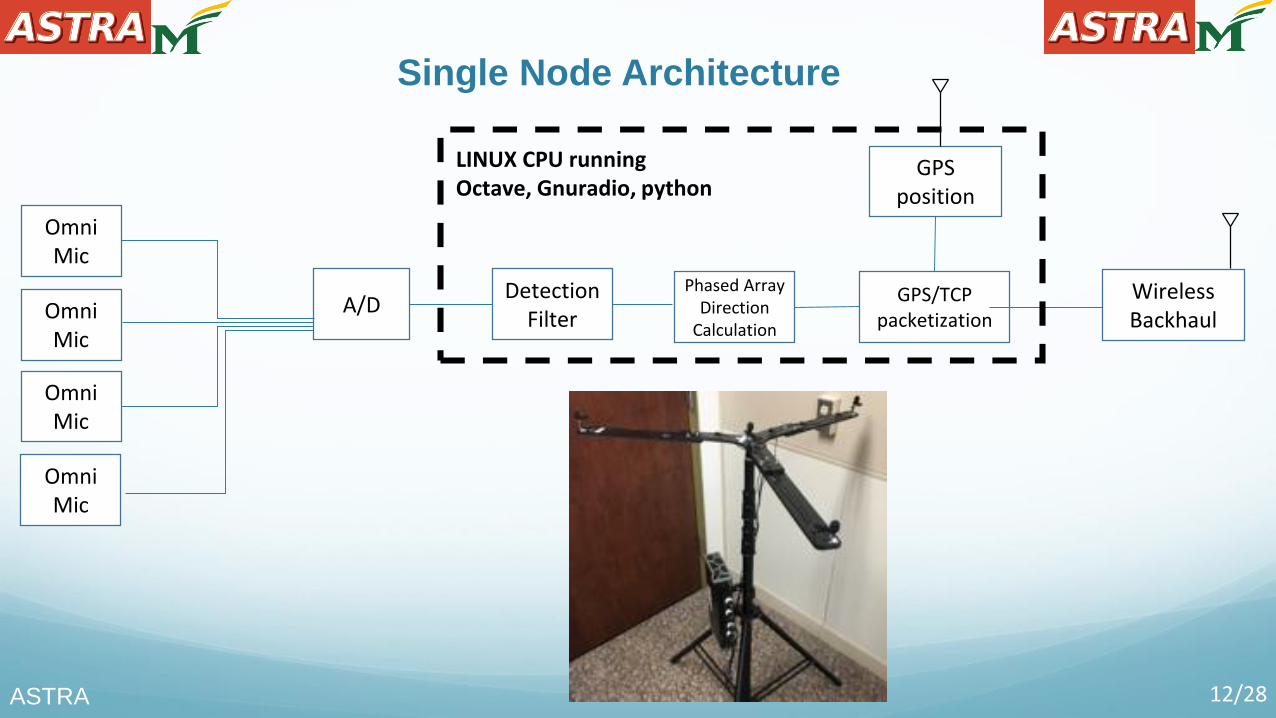
Omni Mic
A/DDetection
FilterWirelessBackhaul
GPS/TCP packetization
GPS position
Omni Mic
Omni Mic
Omni Mic
Phased ArrayDirection
Calculation
LINUX CPU runningOctave, Gnuradio, python
ASTRA 12/28
Single Node Architecture

.308 (Sniper Rifle)
AR15 AR15
.22 Rifle
AK 47
Glock 26
Glock 17Glock 19
ASTRA 13/28
Bank of Match Filters
ASTRA14/28
1.Single Node Benchtop Testing
2.Single Node Loud Speaker Testing
3.Single Node Live Fire Testing
4.Multi Node (3 nodes) Benchtop Testing
5.Multi Node (3 nodes) Loud Speaker Testing
6.Multi Node (3 nodes) Live Fire Testing
ASTRA’s 6 Step Testing
Process
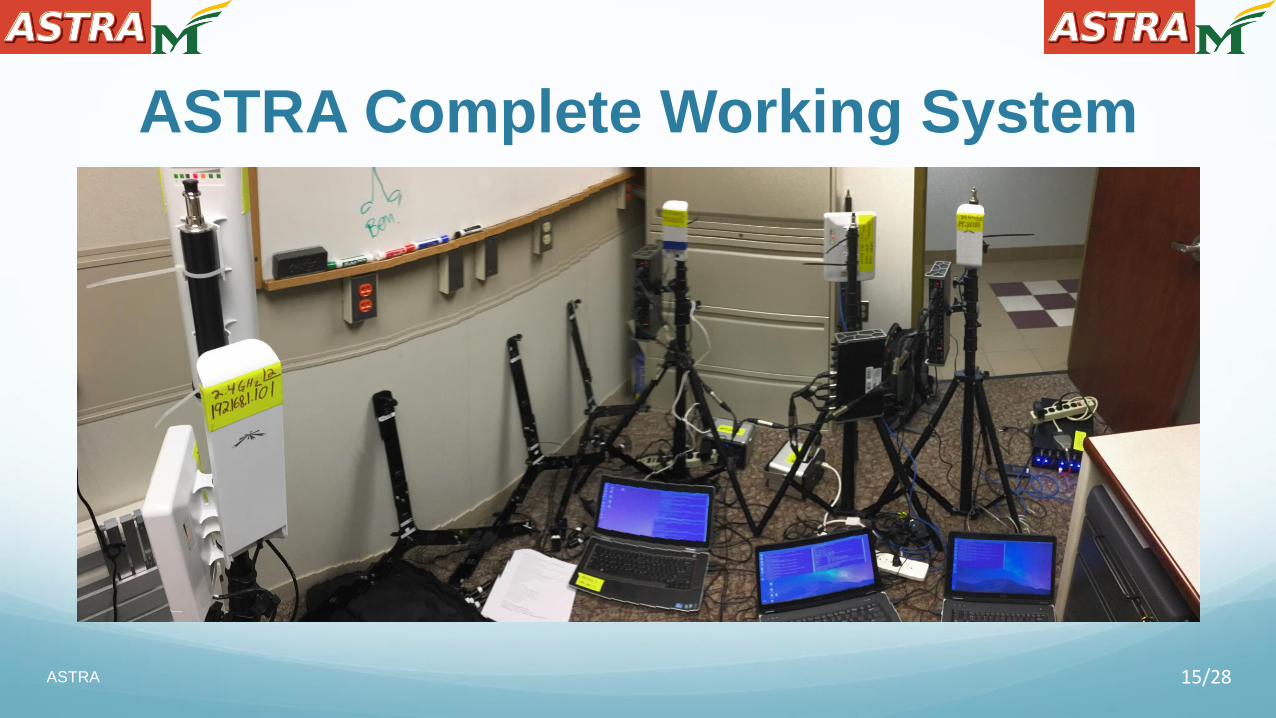
ASTRA Complete Working System
ASTRA 15/28
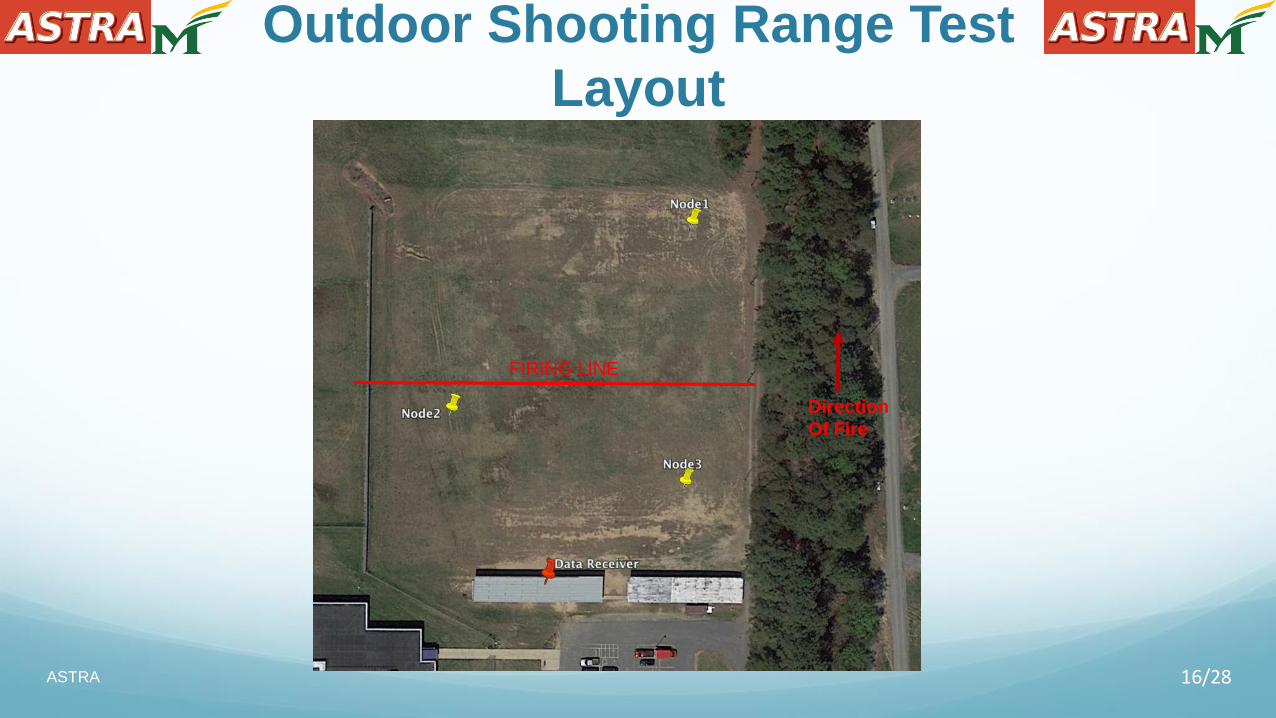
Outdoor Shooting Range Test
Layout
ASTRA 16/28
FIRING LINE
Direction
Of Fire
8/15/2017ASTRA 17
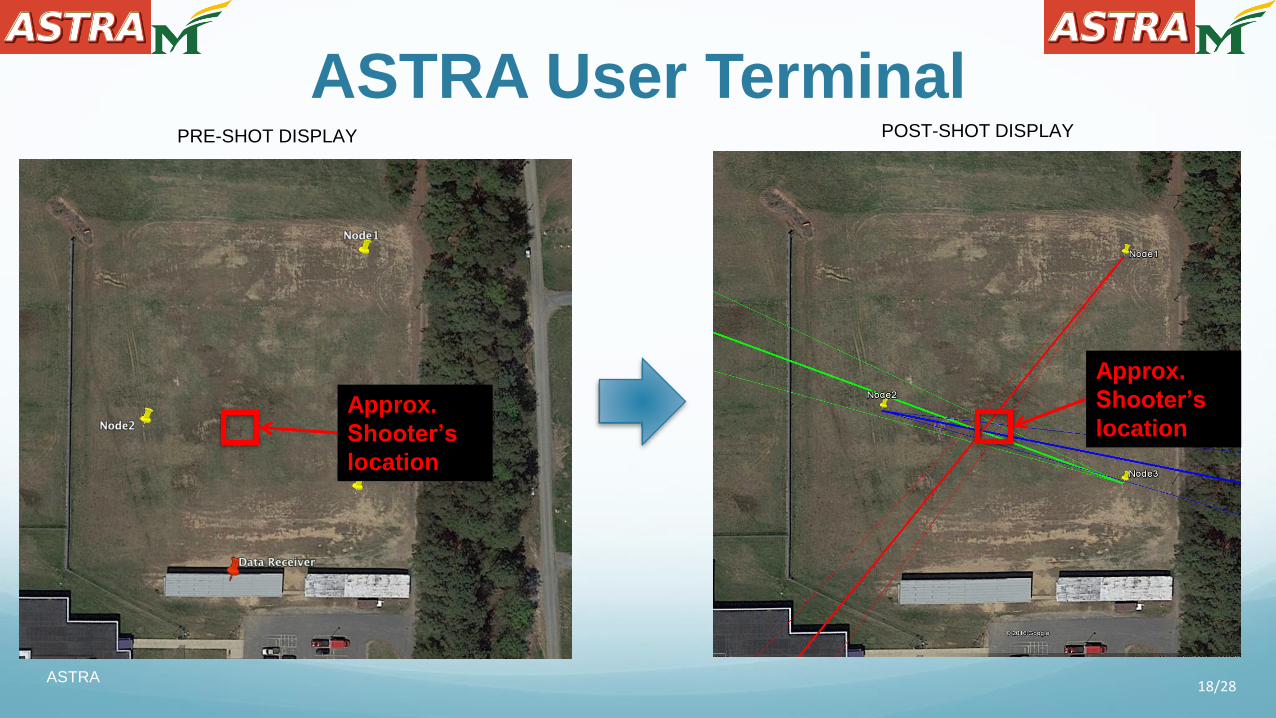
ASTRA User Terminal
ASTRA18/28
PRE-SHOT DISPLAY POST-SHOT DISPLAY
Approx.
Shooter’s
location
Approx.
Shooter’s
location
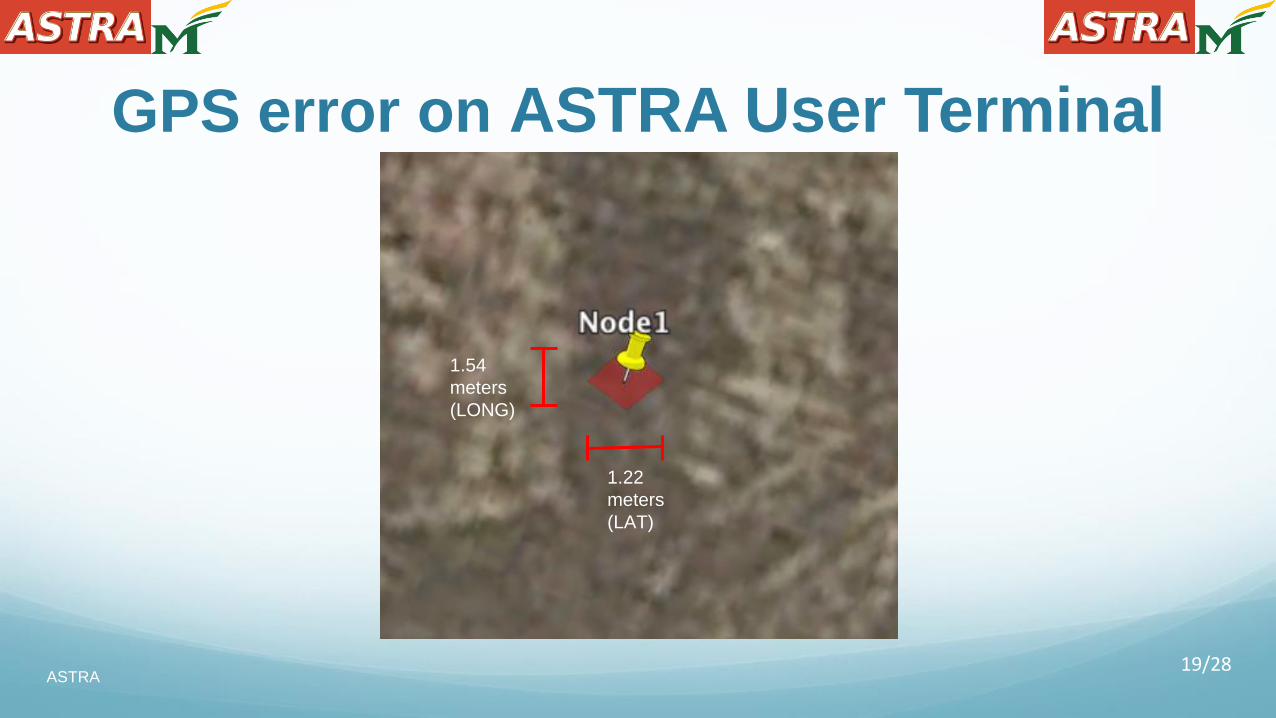
GPS error on ASTRA User Terminal
ASTRA19/28
1.54
meters
(LONG)
1.22
meters
(LAT)
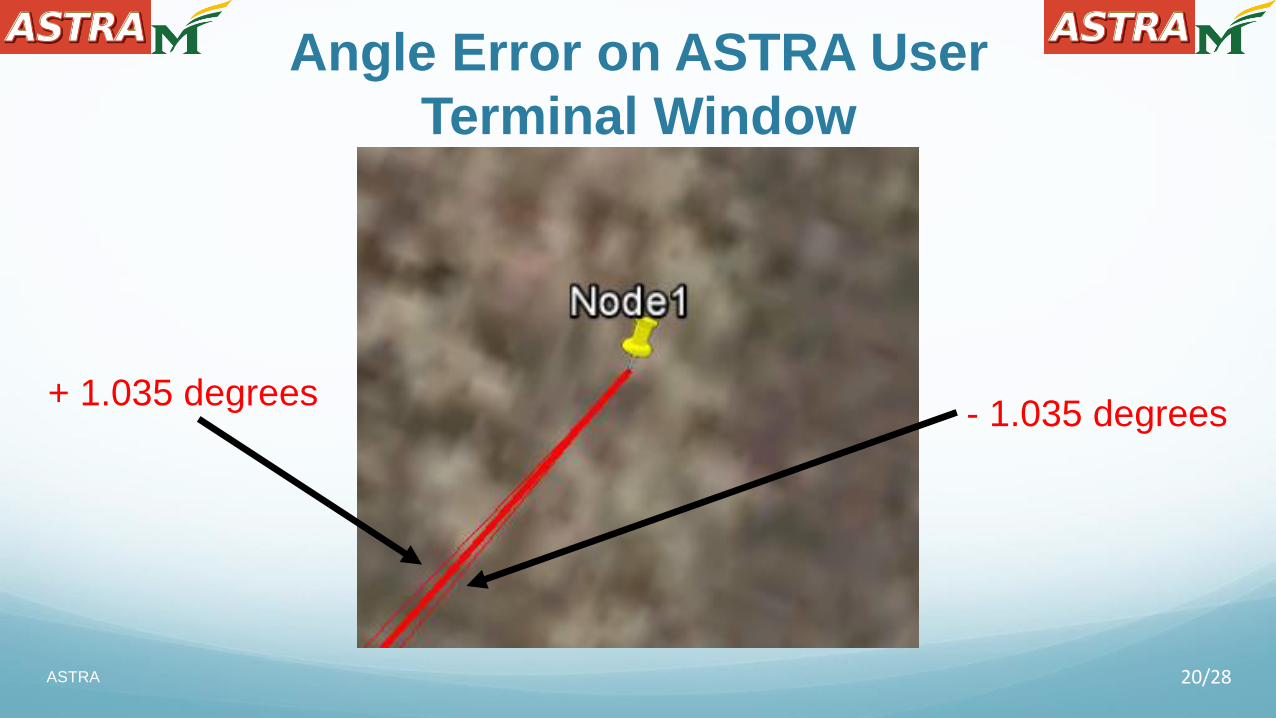
Angle Error on ASTRA User
Terminal Window
ASTRA 20/28
+ 1.035 degrees- 1.035 degrees
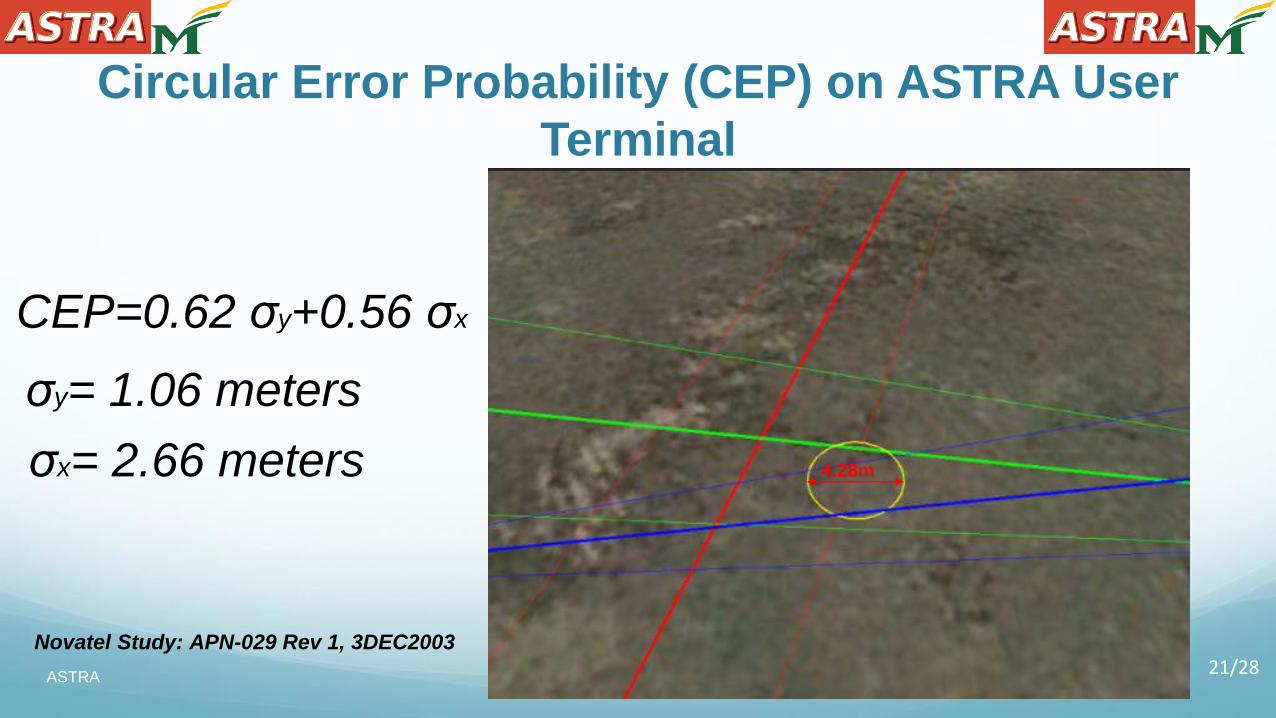
Circular Error Probability (CEP) on ASTRA User
Terminal
8/15/2017ASTRA21/28
4.28m
CEP=0.62 σy+0.56 σx
σy= 1.06 meters
σx= 2.66 meters
Novatel Study: APN-029 Rev 1, 3DEC2003
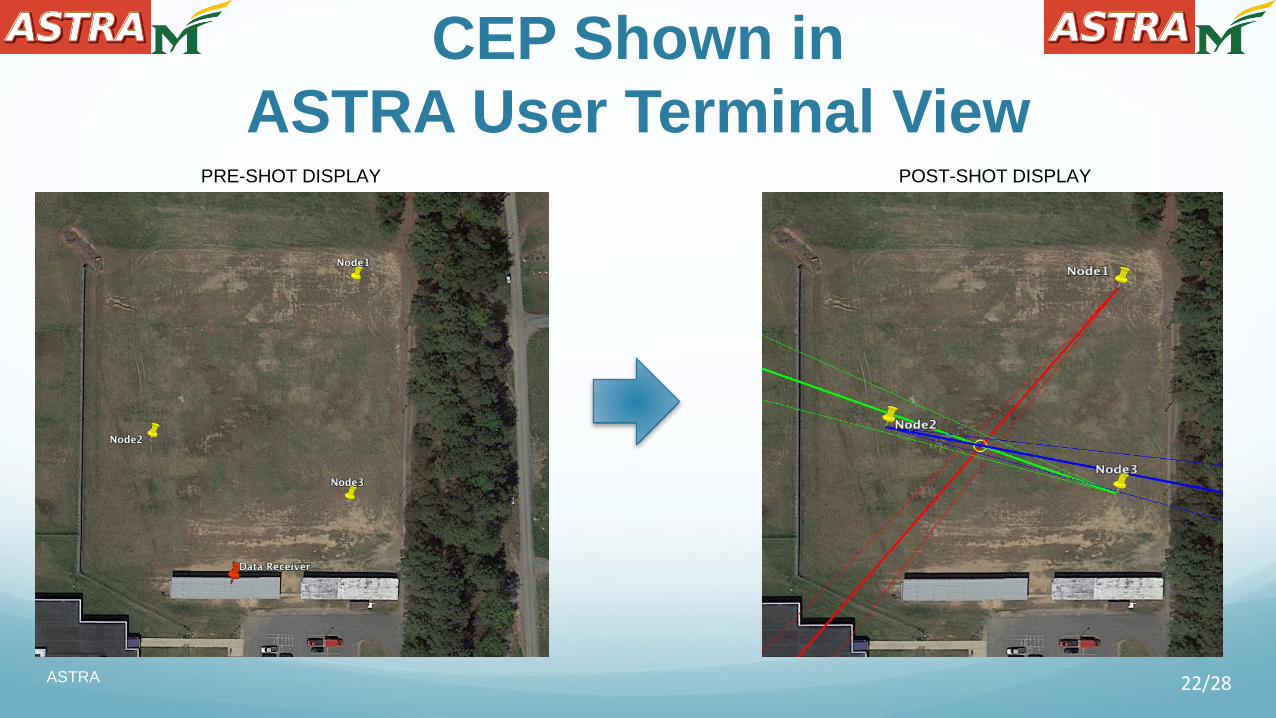
CEP Shown in
ASTRA User Terminal View
ASTRA 22/28
PRE-SHOT DISPLAY POST-SHOT DISPLAY
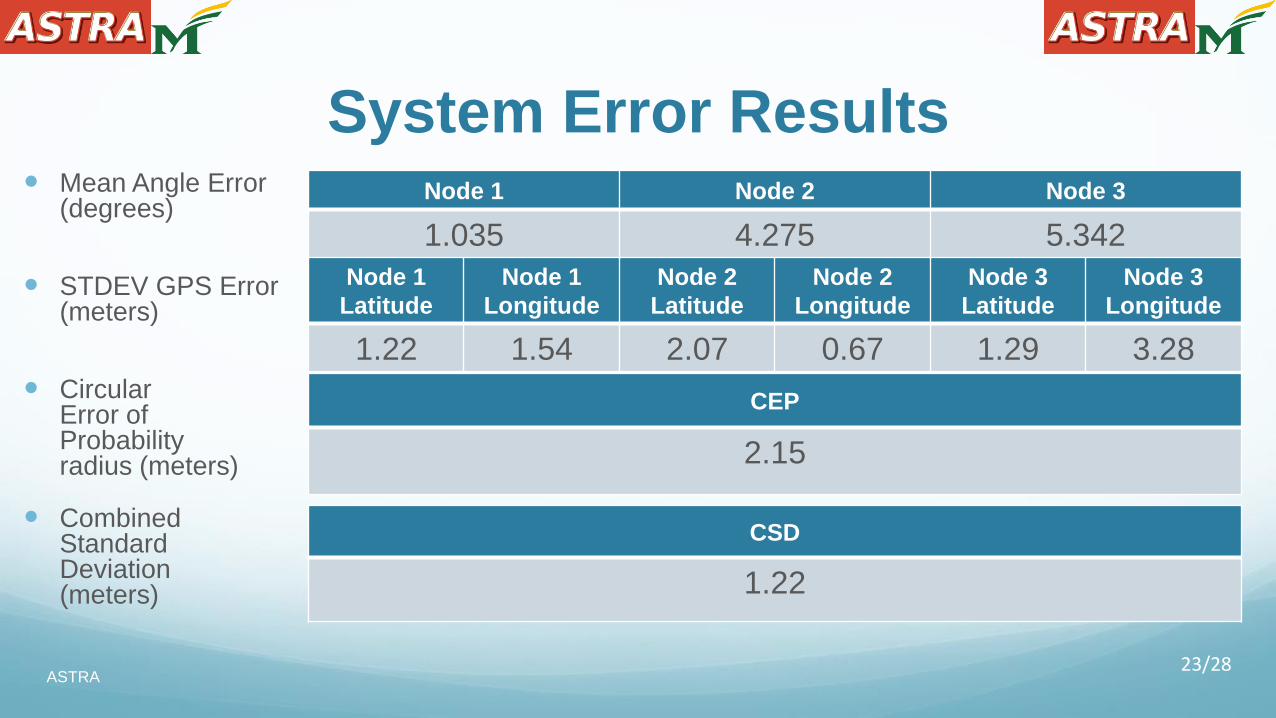
Mean Angle Error(degrees)
STDEV GPS Error(meters)
CircularError ofProbabilityradius (meters)
CombinedStandardDeviation(meters)
ASTRA23/28
System Error Results
Node 1
Latitude
Node 1
Longitude
Node 2
Latitude
Node 2
Longitude
Node 3
Latitude
Node 3
Longitude
1.22 1.54 2.07 0.67 1.29 3.28
Node 1 Node 2 Node 3
1.035 4.275 5.342
CSD
1.22
CEP
2.15
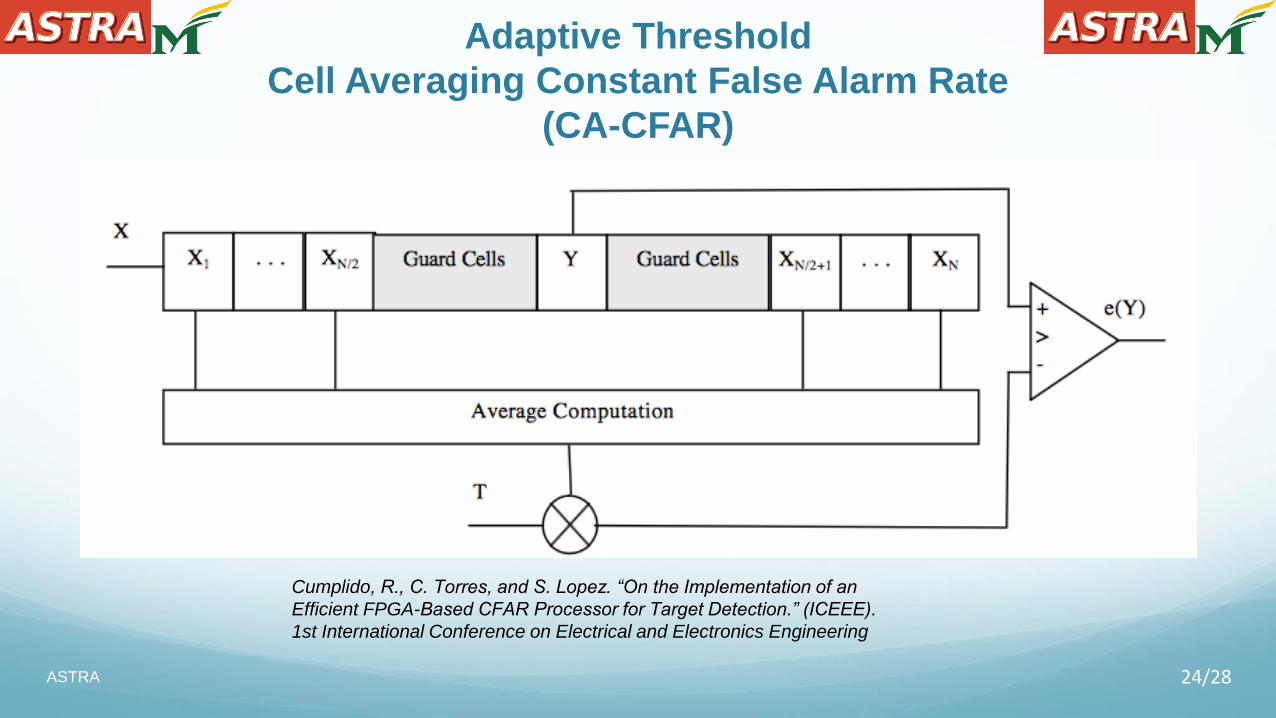
Adaptive Threshold
Cell Averaging Constant False Alarm Rate
(CA-CFAR)
ASTRA 24/28
Cumplido, R., C. Torres, and S. Lopez. “On the Implementation of an
Efficient FPGA-Based CFAR Processor for Target Detection.” (ICEEE).
1st International Conference on Electrical and Electronics Engineering

CA-CFAR Plot Using Recorded Gunshot Data
ASTRA25/28
Threshold
Samples
Ma
gn
itu
de
(D
B) = Threshold
= Data
Thresh Xing
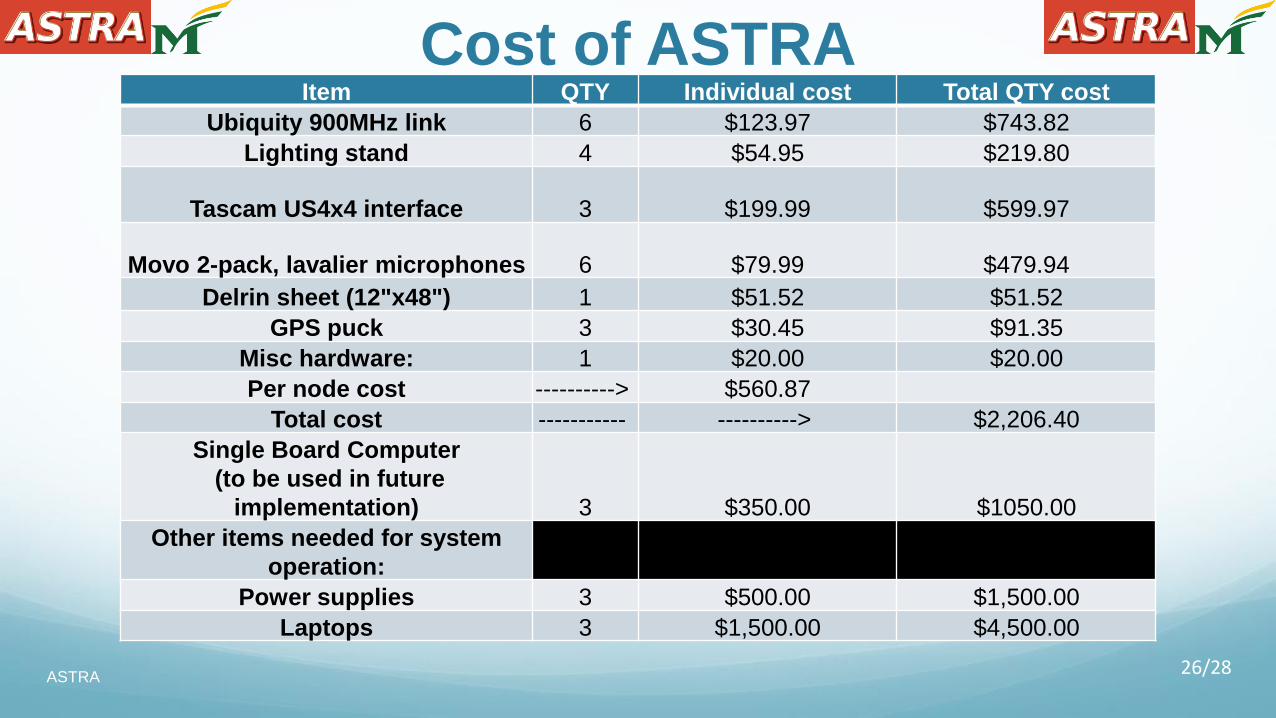
Cost of ASTRA
ASTRA26/28
Item QTY Individual cost Total QTY cost
Ubiquity 900MHz link 6 $123.97 $743.82
Lighting stand 4 $54.95 $219.80
Tascam US4x4 interface 3 $199.99 $599.97
Movo 2-pack, lavalier microphones 6 $79.99 $479.94
Delrin sheet (12"x48") 1 $51.52 $51.52
GPS puck 3 $30.45 $91.35
Misc hardware: 1 $20.00 $20.00
Per node cost ----------> $560.87
Total cost ----------- ----------> $2,206.40
Single Board Computer
(to be used in future
implementation) 3 $350.00 $1050.00
Other items needed for system
operation:
Power supplies 3 $500.00 $1,500.00
Laptops 3 $1,500.00 $4,500.00
Man Hours and Contributions Approx. 140 hours per group member, approx. 700 total man-hours.
Aryan Toughiry Project Manager
Ben McCall Technical Lead
Puja Patel Theoretical Lead
Rohini Shah & Joel Williams Software Leads
ASTRA27/28

ASTRA28/28
Team ASTRA