-
7/25/2019 ACC_slides_MHE_v1.pdf
1/13
Speed Sensorless State Estimation for Induction
Motors: A Moving Horizon Approach
Lei Zhou1, Yebin Wang21 Massachusetts Institute of
Technology
2 Mitsubishi Electric Research Laboratories
cMERL June 28, 2016 1 / 13
-
7/25/2019 ACC_slides_MHE_v1.pdf
2/13
Motivations
The tracking bandwidth of speed sensorless induction drive
islimited by the state estimation: estimation scheme with
fastconvergence is needed;
The tuning of the classic model reference adaptation estimation
isdifficult: systemetic estimation scheme is desired.
The moving horizon estimation (MHE) provides a
systematicframework and demonstrates fast estimation convergence,
but issensitive to model parameter mismatch.
In this work, we study:
The application of MHE for induction motor speed
sensorlessestimation;
Dual-stage adaptive MHE that accounts for parametric
modeluncertainties.
cMERL June 28, 2016 2 / 13
-
7/25/2019 ACC_slides_MHE_v1.pdf
3/13
Moving Horizon Estimation
Moving horizon estimation and fullinformation problem[1].
[1] Rawlings, James B. Moving horizonestimation. Encyclopedia of
Systems andControl (2015): 799-804.
Full information estimation:
minx0,{wk}
T1k=0
(x0) +T1k=0
Lk(wk, vk),
where
(x0) = x0 x02
P10
,
Lk(wk, vk) = wk2Q1k
+ yk h(xk)2R1k
.
Moving horizon estimation:
minz,{wk}
T1k=TN
ZTN(z)+T1
k=TN
Lk(wk, vk).
ZTN(z): arrival cost, summarizing theinformation fromk= 0 toT
N.
cMERL June 28, 2016 3 / 13
-
7/25/2019 ACC_slides_MHE_v1.pdf
4/13
Induction Motor Model
The classical induction motor model in the stationary two-phase
reference frame canbe written as:
ids = ids+ dr+ qr+ 1
uds,
iqs = iqs Lm
dr+ qr +
1
uqs,
dr =Lmids dr qr,qr =Lmiqs+ dr qr ,
=
J(idsqr + driqs)
TLJ
.
The parameters are
=Ls 1 L2mLsLr
; = Rs
; = RrLr
= LmLr
; = 32
LmLr
,
where (Rs, Ls) and (Rr, Lr) are the resistance and inductance of
the stator and rotorrespectively, and Lm is the mutual inductance
between stator and rotor.
cMERL June 28, 2016 4 / 13
-
7/25/2019 ACC_slides_MHE_v1.pdf
5/13
Adaptive MHE: Problem Formulation
Consider a general nonlinear, discrete system:xk+1=fk(xk, uk,
wk),
yk =hk(xk) +vk.
The MHE formulation for state and parameter estimation at time T
is
minp,z,{wk}
T1k=TN
ZTN(z, p) +T1
k=TN
Lk(wk, vk, p)
subject to xk(k; z, {wj}, uk) Xk, k=TN, ..., T
wk Wk, k= (TN), ..., (T1)vk =ykhk(xk) Vk, k=TN, ..., T1
p P
Remark: the conventional (non-adaptive) MHE does not have
parameters p in the
decision variables.cMERL June 28, 2016 5 / 13
-
7/25/2019 ACC_slides_MHE_v1.pdf
6/13
MHE for Induction Motor State Estimation
Stage costs Lk(wk, vk)
Lk(wk, vk) =wTkQ
1wk+ vTkR
1vk.
where Q and R are the covariance matrices for process noise and
measurementnoise respectively.
Arrival cost ZTN(z)Define the cost for the initial estimation
error as (x0) = (x x0)
T10 (x x0).The approximated arrival cost can be calculated
by
ZTN(z) = (z xTN)T1TN(z xTN) +
TN
where TN is updated by the one-step predictor equation as
k+1=GQGT + AkkA
Tk AkkC
T(R + CTkCT)1CkA
Tk .
ConstraintsInequality constraints are removed to simplify the
computation. Theoptimization problem only subject to the system
dynamics.
cMERL June 28, 2016 6 / 13
-
7/25/2019 ACC_slides_MHE_v1.pdf
7/13
Dual-stage MHE for parameter adaption
In an augmented-state MHE, estimating parameters and states
together can leadto highly nonlinear optimization problems and add
difficulties to solving;
In dual-stage adaptive MHE, the state estimation and parameter
estimation areseparated into two sequential steps, and
significantly simplify the solvingdifficulties.
!"#"$ &'(
!"#$
)#*#+$"$* &'(
!"%$
&'()*+,-*&.)*+,- /
*+0 &1)*+,-*
&.)*+,2 /*+0 &1)*+,2
*
3+0
45
State estimation:
minz,{wk}
T1TNx
xT=ZTNx(z)+
T1
k=TNx
Lxk(wk,vk)
Parameter estimation:
minp
pT=
pTNp
+
T1
k=TNp
vTkR1vk
cMERL June 28, 2016 7 / 13
-
7/25/2019 ACC_slides_MHE_v1.pdf
8/13
Dual-stage MHE with RLS parameter estimation
Define parameter vector as = [,,, 1/]T. The current equations
can be written into the regression form:
ik+1ds
ikdsdt
ik+1
qs ik
qsdt
y
= ikds
kds
kqsk ukds
ikqs kqs kdsk ukqs T
1/
,
The recursive least square (RLS) estimation can be readily
applied as
min RLST =
1
T
Tk=1
yk| yk2. Remark: for induction motor parameter estimation
(linear, unconstrained system
with no dynamics), RLS estimation is equivalent to MHE parameter
estimationwith infinite estimation horizon.
cMERL June 28, 2016 8 / 13
-
7/25/2019 ACC_slides_MHE_v1.pdf
9/13
MHE Simulation for Induction Motor
!"#$
!
!
"
#
!"##$
%& "
!
'()*+#
%&
-.+/ %&
$%&'()*+%,+)+-
&01#)2# %3)4
')3025()6378(0
%3)4
')3025()6378(0
9(180:
;()8 "?32#
@A
B "?32#
!%
!
%
&'"#$('
()
(*+, &'-&'
&)
(.
(/
(0
(., &.
12
(3+, &)-
(/, &/
(0, &0
('-
()-
"
&)"#$
B "?32#
@A
> "?32#
Block diagram of induction motor field-oriented control.
cMERL June 28, 2016 9 / 13
-
7/25/2019 ACC_slides_MHE_v1.pdf
10/13
MHE Simulation for Induction Motor
20-steps horizon. Samping rate 10 kHz. P0 =I66 103. Initial
values
x= [1, 1, 0, 0, 5, 0]T; x= [0, 0, 0, 0, 0, 0.1]T.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4MotorSp
eed(rad/s)
0
50
100
150
Reference SpeedPlant SpeedEstimated Speed
Time (s)0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
SpeedEstimation
Error(rad/s)
-2
0
2
4
6
MHE Speed Estimation ErrorEKF Speed Estimation Error
State estimation for induction motor with MHE and EKF.cMERL June
28, 2016 10 / 13
-
7/25/2019 ACC_slides_MHE_v1.pdf
11/13
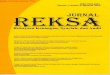
MHE Simulation for Induction Motor
20-steps horizon. Samping rate 10 kHz. P0 =I66 103. Initial
values
x= [1, 1, 0, 0, 10, 0]T; x= [0, 0, 0, 0, 0, 0.1]T.A torque
disturbance of1 Nm is added to motor at T = 0.2 s.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Motor
Speed(rad/s)
0
50
100
150
Reference SpeedPlant Speed Q
TL= 1
Plant Speed QTL= 10Plant Speed Q
TL= 100
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
SpeedEstimation
Error(rad/s)
-20
-10
0
10
20Speed Error Q
TL= 1
Speed Error QTL
= 10
Speed Error QTL
= 100
Time (s)0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Loadtorque(Nm
)
-0.5
0
0.5
1
1.5
True load torqueEstimated, Q
TL= 1
Estimated, QTL
= 10
Estimated, QTL
= 100
Induction motor speed with MHE under step torque
disturbance.
cMERL June 28, 2016 11 / 13
-
7/25/2019 ACC_slides_MHE_v1.pdf
12/13
Dual-stage MHE with RLS for parameter estimation
Initial parameters: 0 = 0.7true; 0 = 0.7true; 0 = 0.9true; 0 =
0.9true.
Dynamic horizon length is used for better convergence.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4M
otorSpeed(rad/s)
0
50
100
150
ReferencePlant speedEstimated
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4SpeedEstimation
Error(rad/s)
-20
0
20
40
Time0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Parameter
EstimationError(%)
-50
0
50
Dual-stage adaptive MHE with RLS parameter estimation for
induction motor system.
Non-adaptive MHE cannot provide converging estimation.
cMERL June 28, 2016 12 / 13
-
7/25/2019 ACC_slides_MHE_v1.pdf
13/13
Conclusion
Moving horizon estimation scheme for induction motor
stateestimation considering the rotor mechanical dynamics is
studied;
Dual-stage adaptive MHE can successfully achieve
convergingparameter and state estimation despite the initial model
parametricerror.
Future work
Analysis and tuning for the dual-stage adaptive MHE;
Computational cost reduction of MHE for real-time
implementation.
cMERL June 28, 2016 13 / 13