Embed Size (px)
Citation preview

Ayesha Sayed, M.S. StudentDionysios Aliprantis, Associate Professor of Electrical and Computer Engineering
Impact of Resolver Error in ElectricVehicle Traction Systems
SELECT Annual Meeting and Technology Showcase – Logan, Utah – September 27-28, 2016
ABSTRACT
Resolvers are used in various motor drive applications, e.g. robotics, HEV/EV’s and
in the aerospace industry.
Position measurement error occurs due to manufacturing imperfections or limitations
of resolver-to-digital converter accuracy.
This affects the field orientation control in permanent magnet (PM) machines and
leads to substantial oscillations in currents, torque etc.
Here, a survey on the effects of non-ideal resolver signal characteristics is presented.
IDEAL RESOLVER (VR)
𝑉sin = 𝐾𝑉0sin(𝜃𝑟)sin 𝜔𝑒𝑡𝑉cos = 𝐾𝑉0cos(𝜃𝑟)sin 𝜔𝑒𝑡
𝑉e= 𝑉0sin 𝜔𝑒𝑡
𝑉e
𝑉sin
𝑉cos
2 lobes 4 lobes3 lobes
All windings are on the stator.
Rotor lobes usually equal motor poles
so that induced output is ~ sin/cos of
electrical rotor angle 𝜃𝑟.
TRACKING MECHANISM
Input to demodulation block
= 𝐾𝑉0 sin 𝜔𝑒𝑡 sin(𝜃𝑟 − 𝜙𝑟) Different control schemes e.g.
PLL, Type-II tracking loops etc.
are used to estimate 𝜙𝑟 .
Errors in resolver signals
introduce error in output of R/D
converter.
AMPLITUDE IMBALANCE
𝑉sin= 𝐾𝑉0sin(𝜃𝑟)sin 𝜔𝑒𝑡𝑉cos = 𝐾 1 + 𝛼 𝑉0cos(𝜃𝑟)sin 𝜔𝑒𝑡
𝜙𝑟 ≈ 𝜃𝑟 −𝛼
2sin(2𝜃𝑟)
Position error occurs at twice
the electrical rotor speed.
Causes:
Unequal inductances in the phases.
Variation in gain between resolver
and R/D converter
IMPERFECT QUADRATURE
𝑉sin= 𝐾𝑉0sin𝜃𝑟sin 𝜔𝑒𝑡𝑉cos = 𝐾𝑉0cos(𝜃𝑟 + 𝛽)sin 𝜔𝑒𝑡
Position error here also exists at
twice the electrical rotor speed.
This error has non-zero average
value
Cause:
Output phases not in perfect
spatial quadrature
Approximations: sin 𝛽 ≈ 𝛽cos𝛽 ≈ 1
DC OFFSET
Causes:
Asymmetrical coil locations due to
three layers of winding on stator
tooth in VR resolvers
Rotor eccentricity during assembly
or operating
𝑉sin = (𝐾0 + 𝐾𝑉0sin 𝜃𝑟 )sin 𝜔𝑒𝑡𝑉cos = (𝐾0 + 𝐾𝑉0cos(𝜃𝑟))sin 𝜔𝑒𝑡
Position error occurs at
fundamental frequencyConventional VR resolver Rotor eccentricity
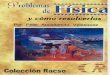
IMPACT OF RESOLVER ERROR
Variable Reluctance (VR) resolver – 2X Brushless Type resolver
(Resolver-to-Digital Converter)
Output of R/D converter:
error
𝜙𝑟 ≈ 𝜃𝑟 +𝛽
2(1 − cos(2𝜃𝑟))
Output of R/D converter:
error
𝜙𝑟 ≈ 𝜃𝑟 + 2𝐾0 cos 𝜃𝑟 +𝜋
4
Position error introduces oscillations
in qd currents.
First and second harmonics are
reflected in the torque.
Position error introduced at:
Fundamental of 1∘ magnitude
Second harmonic of 2∘ magnitudePosition error affecting the system
𝑉sin
𝜙𝑟
Error
cos
Demodulation
Control
𝑉cos
sin
𝑉e
𝑻𝒆Current
Controlqd/abc Inverter Machine
𝜽𝒓 + ∆𝜽𝒓 𝒊𝒒𝒅∗
Ƹ𝒊𝒒𝒅 𝒗𝒒𝒅∗ 𝒗𝒂𝒃𝒄
𝒊𝒂𝒃𝒄
𝜽𝒓 + ∆𝜽𝒓
abc/qd