Embed Size (px)
Citation preview
AAU
A Trajectory Splitting Model for Efficient
Spatio-Temporal Indexing
Presented by YuQing Zhang
Slobodan Rasetic Jorg Sander James Elding Mario A. Nascimento

AAU2
Contents
Introduction1
Background and Motivation2
Trajectory Splitting Methods3
Experimental Results4
Related Work5
Conclusion6
Strengths and Weaknesses7
Relate to my Project8
AAU3
Contents
Introduction1
Background and Motivation2
Trajectory Splitting Methods3
Experimental Results4
Related Work5
Conclusion6
Strengths and Weaknesses7
Relate to my Project8
AAU4
Introduction
Problem Splitting trajectories optimally with the goal of minimizing the expected number of
I/Os
Focus on Spatio-temporal queries over historical trajectory data Using index structures that
use MBRs
Past Solutions A single MBR Each line segment an MBR Split trajectories and the resulting sub-trajectories independently by MBRs
Main contributions An analytical cost model and a dynamic programming solution for splitting a given
set of trajectories optimally (in terms of expected I/Os). Another cost model and algorithm for segments updated incrementally
AAU5
Contents
Introduction1
Background and Motivation2
Trajectory Splitting Methods3
Experimental Results4
Related Work5
Conclusion6
Strengths and Weaknesses7
Relate to my Project8
AAU6
Background and Motivation
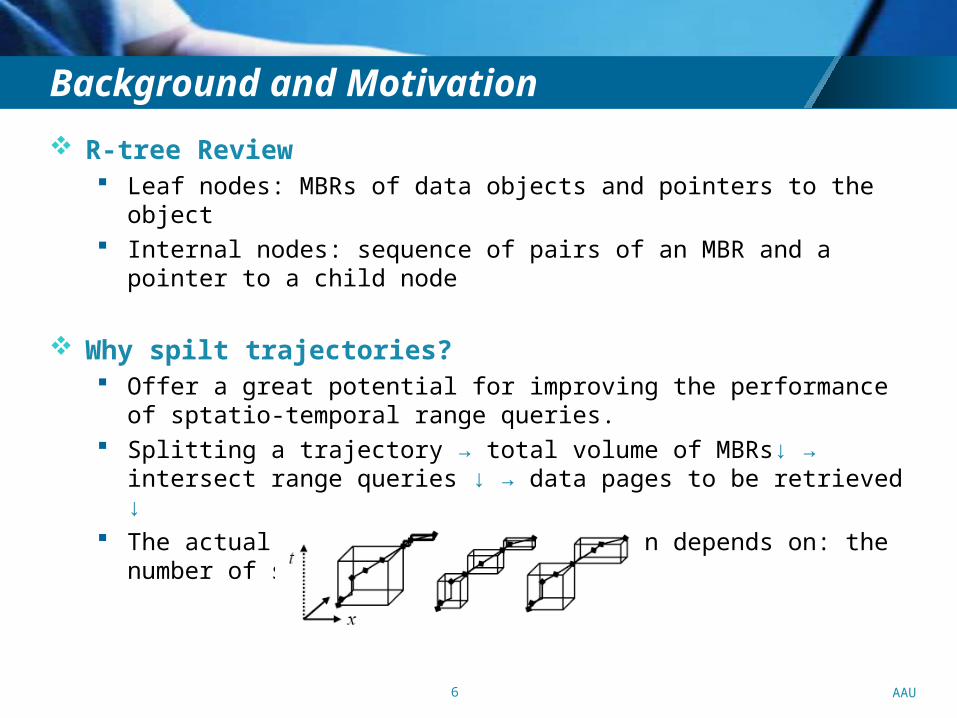
R-tree Review Leaf nodes: MBRs of data objects and pointers to the object Internal nodes: sequence of pairs of an MBR and a pointer to a child node
Why spilt trajectories? Offer a great potential for improving the performance of sptatio-temporal
range queries. Splitting a trajectory → total volume of MBRs↓ → intersect range queries ↓
→ data pages to be retrieved ↓ The actual amount of volume reduction depends on: the number of splits
and split points
AAU7
Background and Motivation
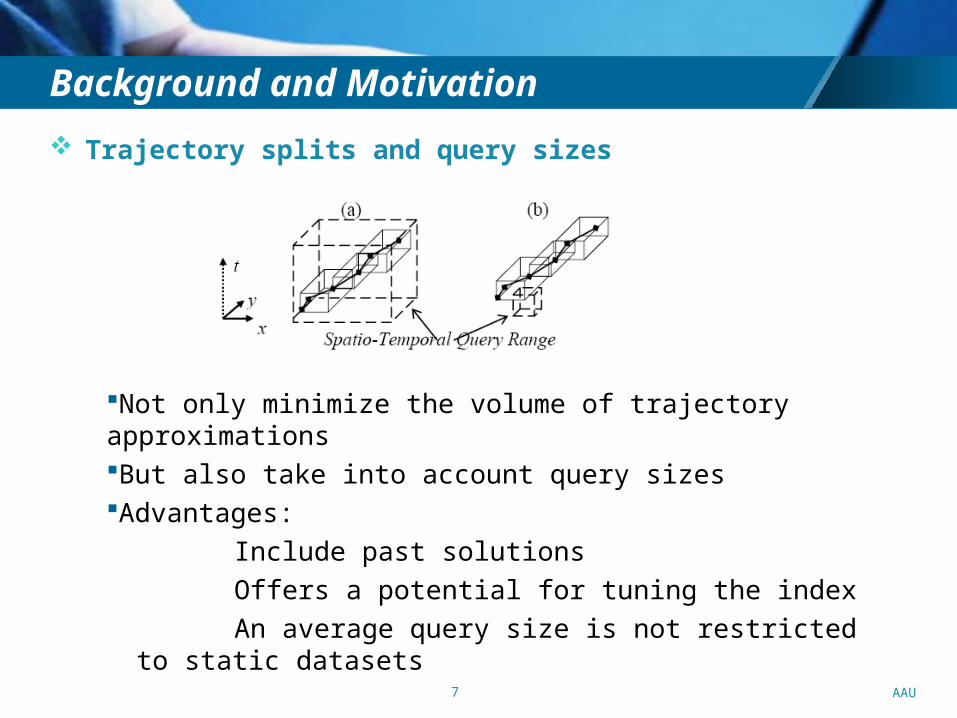
Trajectory splits and query sizes
Not only minimize the volume of trajectory approximationsBut also take into account query sizesAdvantages:
Include past solutions
Offers a potential for tuning the index
An average query size is not restricted to static datasets
AAU8
Contents
Introduction1
Background and Motivation2
Trajectory Splitting Methods3
Experimental Results4
Related Work5
Conclusion6
Strengths and Weaknesses7
Relate to my Project8
AAU9
Trajectory splitting Methods - Optimal Trajectory Splitting
Objectives Derive an analytical cost model
Estimate the expected number of I/Os
Yielded by a given split of a trajectory and a given query size Introduce an algorithm based on this cost model
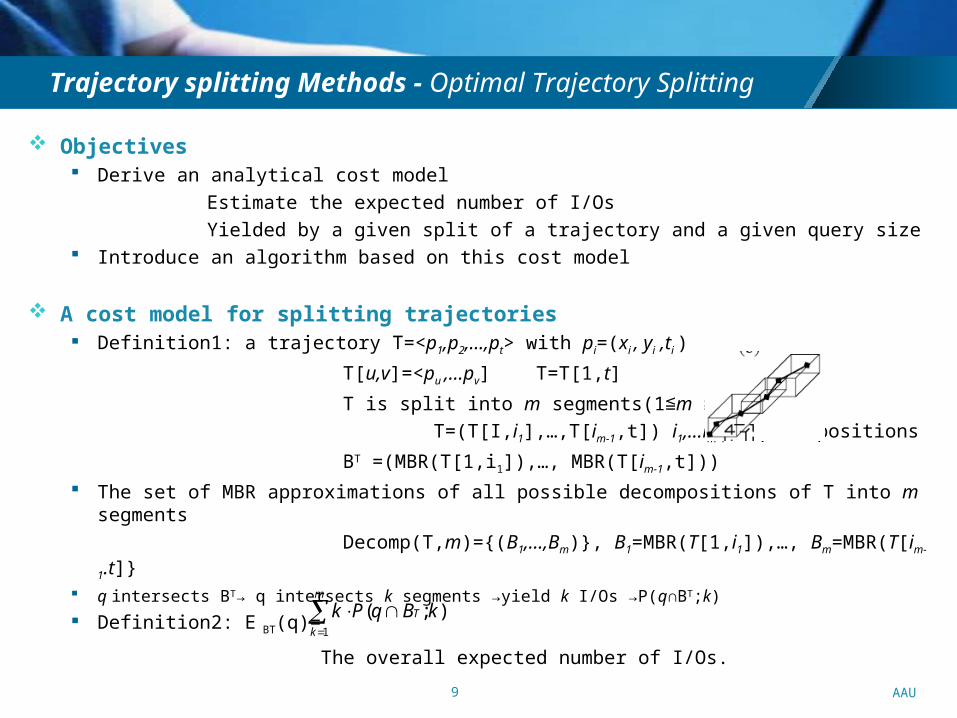
A cost model for splitting trajectories Definition1: a trajectory T=<p1,p2,…,pt> with pi=(xi , yi ,ti )
T[u,v]=<pu ,…pv] T=T[1,t]
T is split into m segments(1≦m t-1) :≦ T=(T[I,i1],…,T[im-1,t]) i1,…im-1 :split positions
BT =(MBR(T[1,i1]),…, MBR(T[im-1,t]))
The set of MBR approximations of all possible decompositions of T into m segments
Decomp(T,m)={(B1,…,Bm)}, B1=MBR(T[1,i1]),…, Bm=MBR(T[im-1.t]} q intersects BT→ q intersects k segments →yield k I/Os →P(q∩BT;k)
Definition2: E BT(q)=
The overall expected number of I/Os.
);(1
kBqPk T
m
k
AAU10
Trajectory splitting Methods - Optimal Trajectory Splitting
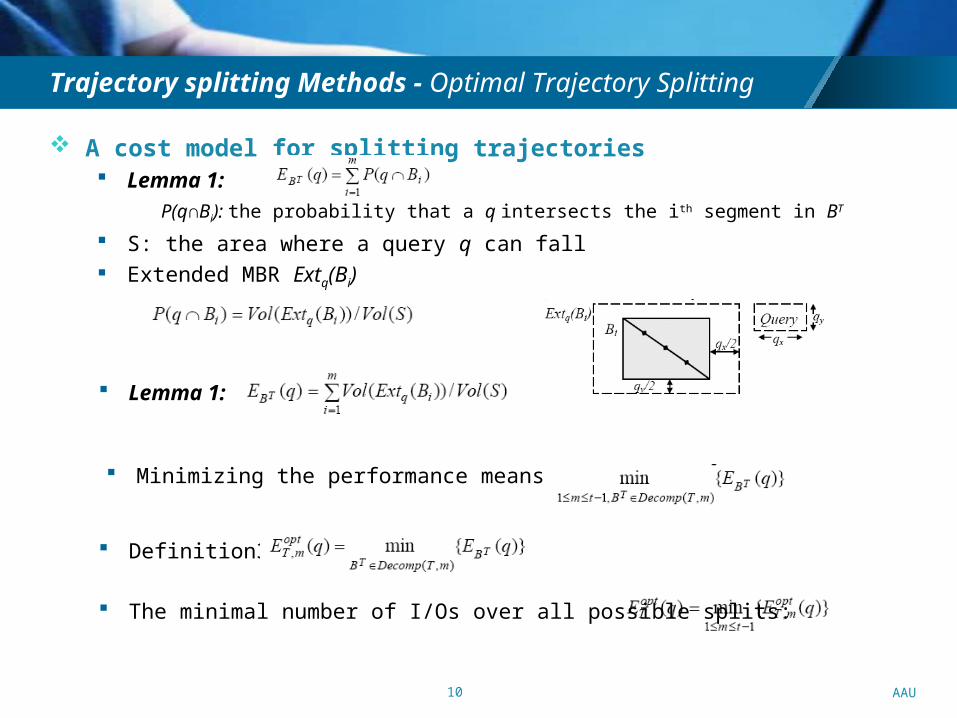
A cost model for splitting trajectories Lemma 1:
P(q∩Bi): the probability that a q intersects the ith segment in BT
S: the area where a query q can fall Extended MBR Extq(Bi)
Lemma 1:
Minimizing the performance means finding
Definition3:
The minimal number of I/Os over all possible splits:
AAU11
Trajectory splitting Methods - Optimal Trajectory Splitting
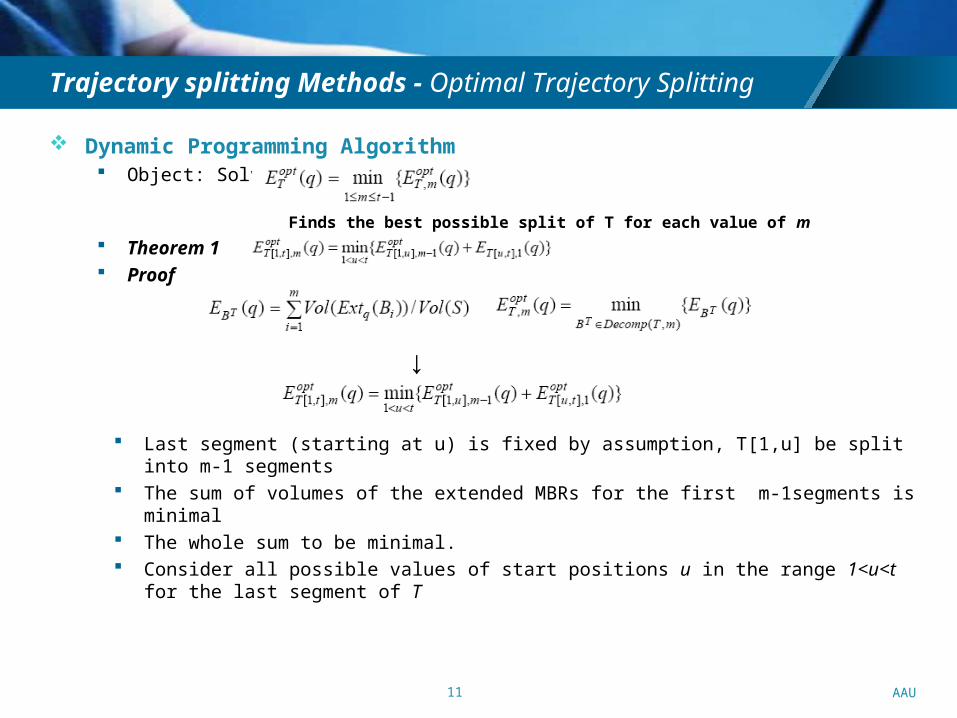
Dynamic Programming Algorithm Object: Solve
Finds the best possible split of T for each value of m
Theorem 1 Proof
↓
Last segment (starting at u) is fixed by assumption, T[1,u] be split into m-1 segments The sum of volumes of the extended MBRs for the first m-1segments is minimal The whole sum to be minimal. Consider all possible values of start positions u in the range 1<u<t for the last segment of T
AAU12
Trajectory splitting Methods – Heuristic Trajectory Splitting
Objective
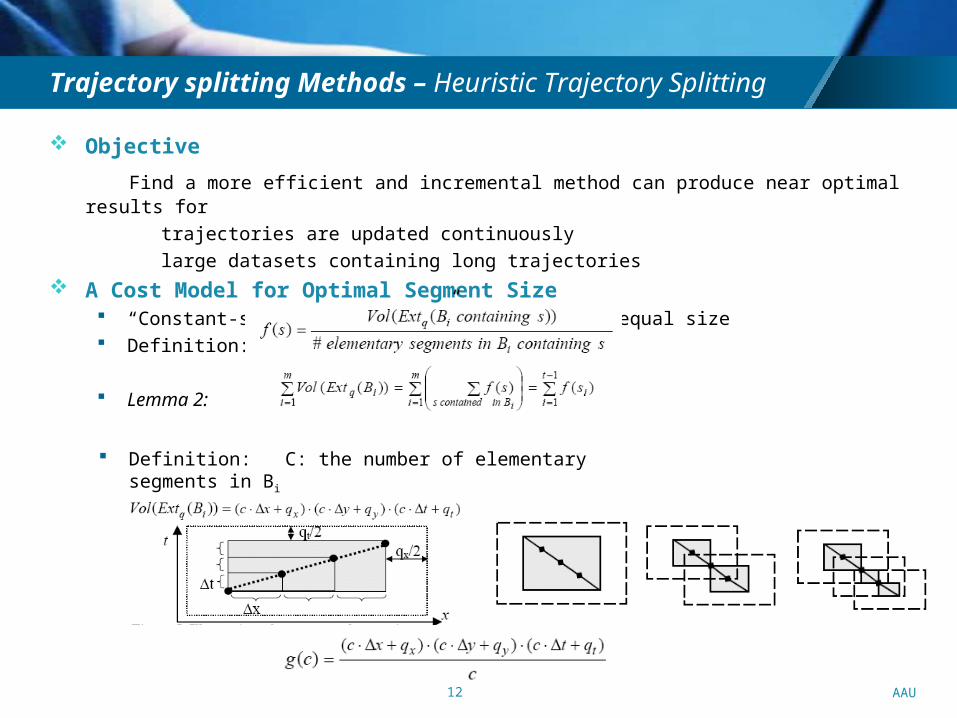
Find a more efficient and incremental method can produce near optimal results for
trajectories are updated continuously large datasets containing long trajectories A Cost Model for Optimal Segment Size
“Constant-slope trajectories”: segments of equal size Definition:
Lemma 2:
Definition: C: the number of elementary segments in B i
AAU13
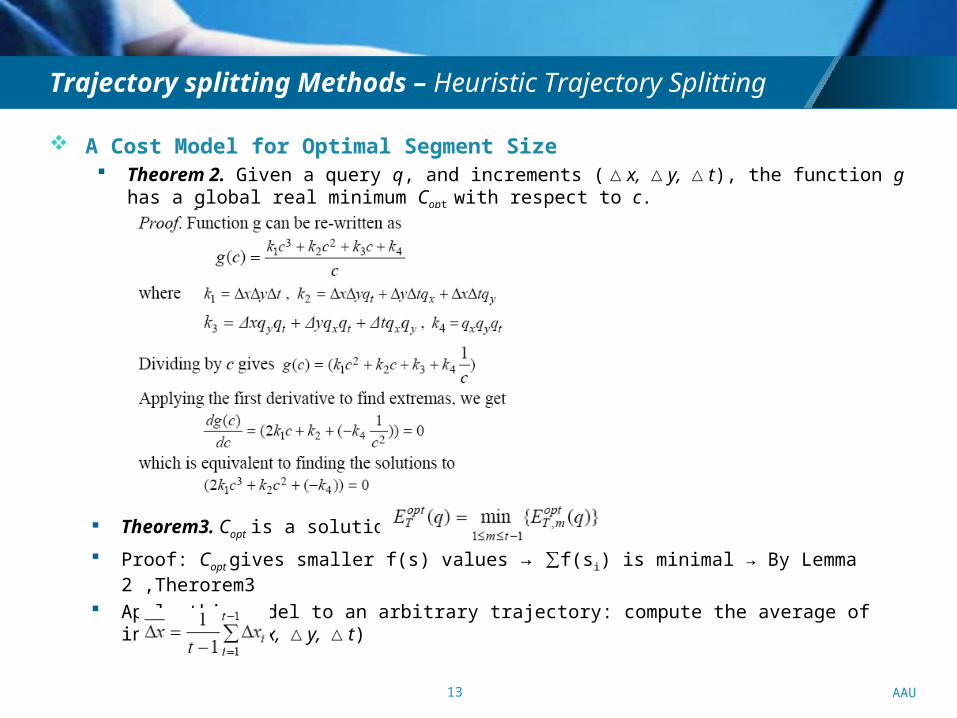
Trajectory splitting Methods – Heuristic Trajectory Splitting
A Cost Model for Optimal Segment Size Theorem 2. Given a query q, and increments ( x, y, t△ △ △ ), the function g has a global real
minimum Copt with respect to c.
Theorem3. Copt is a solution to
Proof: Copt gives smaller f(s) values → ∑f(si) is minimal → By Lemma 2 ,Therorem3
Apply this model to an arbitrary trajectory: compute the average of increments( x, y, t△ △ △ )

AAU14
Trajectory splitting Methods – Heuristic Trajectory Splitting
Linear Time Trajectory Splitting Object: Apply the Copt method.
Determine a suitable number of points that should be buffered before applying the split policy. Iteratively collecting points until becomes true.
Means at least one possible split will result in better I/O expection.
Linear time trajectory splitting Algorithm --- LinearSplit
AAU15
Contents
Introduction1
Background and Motivation2
Trajectory Splitting Methods3
Experimental Results4
Related Work5
Conclusion6
Strengths and Weaknesses7
Relate to my Project8
AAU16
Experimental Results Comparison Between
OptimalSplit: dynamic programming-based algorithm LinearSplit: linear time algorithm NoSplit: approximate each trajectory by a single MBR FullSplit: approximate each line segment of a trajectory individually by an MBR HKTG: DPSplit, volume oriented split policy
Results Number of Disk I/Os No matter varying query size and varying database size, the I/O performance of our algorithms
is always significantly better than the others,. Except FullSplit in varying database size, but its performance degrades much faster with
increasing database size.
Index Building Time 1. Varying query size: Our algorithms exhibit a good balance between trajectory splitting time and insertion time. As
query size increases, our index building times decreases. 2. Varying Database Size Our algorithms scale linearly at much slower rate than all other ones.
3 4
AAU17
Contents
Introduction1
Background and Motivation2
Trajectory Splitting Methods3
Experimental Results4
Related Work5
Conclusion6
Strengths and Weaknesses7
Relate to my Project8
AAU18
Related Work Most spatio-temporal index structures proposed are based on R-
tree. ---Mokbel.. Saptio-temporal Access Methods
Three main approaches Time is simply treated as an additional spatial dimension.
---Theodoridis,.. Spatio-Temporal Indexing for Large Multimedia Applications
TB-tree: Insertion split strategy is oriented towards trajectory preservation.
---Pfoser,… Novel Approaches to the Indexing of Moving Object Trajectories Leads to Inefficient indices and leading to a high degree of overlap among the MBRS.
Time and space are treated differently within a combined indexing scheme.
---Chakke,.. Indexing Large Trajectory Sets with SETI
SEB Tree ---Songs,… An Approach to Index Continuously Moving Objects
They are not compatible with our cost models since they don’t use MBRs. Time is also treated as differently from space and it is to have virtual and incrementally
maintained 2-dimensional R-trees for each point in time.
---Nascimento,.. Towards Historical R-tree
Suffers from a prohibitively large overhead when indexing very dynamic scenarios, not suite for trajectory data.
AAU19
Related Work Recent Work--- improve the first approach
Replace MBRs by different approximation
Trim the corners of trajectories’ MBRs to obtain a bounding octagon prism.
---Zhu,…Discovering Similar Multidimensional Trajectories
Splitting trajectories
Give a total number of allowed splits for a whole set of trajectories to reduce the amount of approximations’ empty space.
---Hadjieleftheriou,.. Efficient indexing of Spatiotemporal Objects
AAU20
Contents
Introduction1
Background and Motivation2
Trajectory Splitting Methods3
Experimental Results4
Related Work5
Conclusion6
Strengths and Weaknesses7
Relate to my Project8
AAU21
Conclusion Split trajectories and take into account average query sizes
A cost model for predicating the number of data page accesses and a trajectory splitting algorithm
A linear time splitting algorithm
The algorithms scale well respect to database size for both query performance and index building time.
Future Works Extending the cost model to better understand the effect of directory level page accesses. Designing optimized split policies for directory pages of spatio-temporal indices.
AAU22
Contents
Introduction1
Background and Motivation2
Trajectory Splitting Methods3
Experimental Results4
Related Work5
Conclusion6
Strengths and Weaknesses7
Relate to my Project8
AAU23
Strengthens and Weaknesses
Strengthens The proof of each lemma and theorem is quite clearly and detailed.
Good related work
Weaknesses Some definition is not clear.
S and Extq(Bi)
Less pseudecode.
No pseudecode for dynamic Programming algorithm
AAU24
Contents
Introduction1
Background and Motivation2
Trajectory Splitting Methods3
Experimental Results4
Related Work5
Conclusion6
Strengths and Weaknesses7
Relate to my Project8

AAU25
Relate to my Project
My project Compare some methods to index the historical trajectories data by Oracle
Find a new method to improve the indexing in some aspects.
Relate… Give me a method about the realm I’m researching.
Give me an optional orientation about my new method.
AAU
Presented by YuQing Zhang
AAU27
Questions?






















![[9] Jorg Wilde_CBM-Germany](https://img.pdfslide.us/doc/110x75/577cc7721a28aba711a0f5fd/9-jorg-wildecbm-germany.jpg)