-
A Survey on Multi-net Global Routing for Integrated Circuits
∗
Jiang Hu and Sachin S. Sapatnekar
{jhu, sachin}@mail.ece.umn.edu
Department of Electrical and Computer Engineering
University of Minnesota
Minneapolis, MN 55455, USA
Tel: 612-625-0025, Fax: 612-625-4583
Abstract
This paper presents a comprehensive survey on global routing
research over about the last two
decades, with an emphasis on the problems of simultaneously
routing multiple nets in VLSI circuits
under various design styles. The survey begins with a coverage
of traditional approaches such as
sequential routing and rip-up-and-reroute, and then discusses
multicommodity flow based methods,
which have attracted a good deal of attention recently. The
family of hierarchical routing techniques
and several of its variants are then overviewed, in addition to
other techniques such as move-based
heuristics and iterative deletion. While many traditional
techniques focus on the conventional ob-
jective of managing congestion, newer objectives have come into
play with the advances in VLSI
technology. Specifically, the focus of global routing has
shifted so that it is important to augment
the congestion objective with metrics for timing and crosstalk.
In the later part of this paper, we
summarize the recent progress in these directions. Finally, the
survey concludes with a summary of
possible future research directions.
∗This work is supported in part by the NSF under contract
CCR-9800992 and the SRC under contract 98-DJ-609.
-
Contents
1 Introduction 4
2 Problem background and formulation 6
3 Basic techniques 9
3.1 Maze routing . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 9
3.2 Steiner tree construction . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 11
3.3 0-1 integer linear programming . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 12
3.4 Network flow model . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 13
4 Sequential routing techniques 14
4.1 Force-directed routing . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 15
4.2 Sequential routing through Steiner min-max tree construction
. . . . . . . . . . . . . . . 16
4.3 Minimum weighted Steiner tree . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 17
5 Region-wise routing 19
5.1 Unique pattern first and outer rim first routing . . . . . .
. . . . . . . . . . . . . . . . . 19
5.2 Routing in order of wire orientations and in terms of rows .
. . . . . . . . . . . . . . . . 22
6 Move-based heuristics 23
7 Rip-up and reroute 24
8 Multicommodity flow based approach 28
8.1 The Shragowitz-Keel algorithm . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 30
8.2 The Raghavan-Thompson rounding method . . . . . . . . . . .
. . . . . . . . . . . . . . 31
8.3 Application of the Shahrokhi-Matula algorithm . . . . . . .
. . . . . . . . . . . . . . . . 33
8.4 Application of Garg-Könemann algorithm . . . . . . . . . .
. . . . . . . . . . . . . . . . 34
9 Hierarchical methods 36
9.1 Top down successive refinement . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 37
2
-
9.2 Bottom up merging . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 41
9.3 Hybrid hierarchical method . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 43
9.4 Hierarchical routing for custom design . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 44
9.5 Hierarchical bisection and linear assignment . . . . . . . .
. . . . . . . . . . . . . . . . . 46
9.6 Four bend hierarchical routing . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 48
10 Iterative deletion 49
11 Timing driven global routing 51
11.1 Multicommodity flow based approach . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 51
11.2 Iterative deletion based routing for standard cells . . . .
. . . . . . . . . . . . . . . . . . 53
11.3 Hierarchical bisection and assignment . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 53
12 Crosstalk driven global routing 56
13 Conclusions and future directions 59
3
-
1 Introduction
Eighteen years ago, a then new journal, the IEEE Transactions on
Computer-Aided Design, pre-
sented a special issue on routing in microelectronics that
contained several landmark papers. Another
significant publication at about the same time was a collection
of papers edited by Hu and Kuh [40]. In
the years that have elapsed since the publication of these two
works, with the scaling of feature sizes,
VLSI technology and circuits have undergone dramatic progress,
as characterized by Moore’s law. Par-
ticularly in recent years, this has resulted in interconnect
delay accounting for a major portion of circuit
clock cycle, as a result of which VLSI physical design has grown
to be a critical factor. Moreover, the
growing circuit complexity has enlarged the size of the design
automation problems in physical design
and has brought forth a new set of challenges.
Within the physical design flow, one of the most critical steps
is global routing, a stage where signal
nets are connected coarsely under a given placement so that
wire/via spaces are allocated to each signal
net. The quality of the global routing solution directly affects
chip area, speed, power consumption and
the number of iterations required to complete the design cycle,
and hence this step plays an important
role in determining circuit performance. On the other hand,
global routing is a notoriously difficult
problem: even the most simple version of the problem, where a
set of two-pin nets is to be routed under
congestion constraints, is an NP-complete problem [49].
As a result of both the importance of the problem and its
difficulty, a great deal of research has been
carried out on global routing during the last two decades,
covering a variety of design styles including
gate arrays, sea of gates, standard cell-based designs and
custom circuits. Various techniques and
strategies have been proposed, including rip-up-and-reroute,
hierarchical methods, multi-commodity
flow techniques and iterative deletion. However, even with all
of these efforts, it is not entirely accurate
to imply that the global routing problem has been solved
satisfactorily. In particular, the newest
advances in VLSI technology have raised a new set of issues to
be solved and have further complicated
the requirements on global routing.
The purpose of this survey is to provide a comprehensive
overview of research in global routing,
with specific emphasis on the problem of the simultaneous global
routing of multiple nets in integrated
circuits. This problem requires competent resource management as
the global nets compete for a
restricted set of global resources such as routing resources,
crosstalk budgets and net delays. The
4
-
nature of this problem has changed remarkably over the last two
decades, with several design styles
gaining favor and then falling out of favor, but many of the
fundamental techniques that were introduced
are useful to other more modern design paradigms. In reading
this survey, the reader is cautioned not
to set too much store on the specific technology being
discussed, but rather, to focus on the underlying
algorithms in an attempt to determine how best they may be
extended to the specific routing problem
du jour.
There are several prior surveys that complement the material
presented here. Two early surveys on
global routing are presented in a paper by Kuh and
Marek-Sadowska [50], and in a chapter of the book
by Lengauer [56]. The books by Sherwani [78], Sait and Youssef
[73] and Sarrafzadeh and Wong [75],
present a more updated coverage of progress in global routing.
The book by Kahng and Robins [45]
and the survey paper by Cong et al. [16] focus on global routing
issues for a single net. In most of these
sources, the attention paid to the problems of simultaneously
routing multiple global nets is limited,
and the objective of this work is to attempt to bridge that gap.
In the remainder of this paper, the
phrase “global routing” will implicitly imply, unless otherwise
stated, that the routing of all nets is being
considered. For a survey of this type, it is appropriate to also
list a set of related routing problems that
have not been covered in this survey in order to limit its
scope. These include MCM/PCB routing,
FPGA routing, single layer routing, and parallel algorithms for
global routing.
This paper is organized as follows. At the outset, the problem
background and formulation are
described in Section 2, and the basic techniques that are
frequently used in global routing are summarized
in Section 3. Section 4 introduces the first set of global
routing algorithms, namely, sequential routing
techniques. Edge-wise routing methods are covered in Section 5,
followed by a brief review of move-
based heuristics in Section 6. Next, rip-up-and-reroute
approaches are described in Section 7 and
multicommodity flow based methods in Section 8. Hierarchical
global routing procedures and the
iterative deletion technique are discussed in Sections 9 and 10,
respectively. Most of the methods
described until this section use conventional metrics to manage
resource contention. Towards the end,
in Sections 11 and 12, we present ways in which some objectives
related to timing driven and crosstalk
driven global routing are incorporated. Finally, Section 13
concludes this survey and suggests directions
for future research.
5
-
2 Problem background and formulation
For a given location for every cell or macro-block in the
layout, each set of electrically equivalent pins
that belong to different cells or macro-blocks, called a net,
must be wired together in a step commonly
referred to as routing. Due to technological or methodological
restrictions, it is often the case that
some areas of the layout are prohibited from allowing wire
routes, corresponding to wiring blockages.
The fundamental goal of the routing step is to connect every net
successfully and to resolve resource
contentions. In modern VLSI design, this could be an exceedingly
complex problem if it were done in a
single step, since there could be millions of elements and nets
integrated on a single chip. One common
approach is to divide the routing procedure into two stages:
global routing and detailed routing. In
global routing, the chip area is divided into a set of
coarsely-defined regions, and wires that cross
the boundaries of these regions are allocated a coarse route
that determines which regions they must
traverse. Following this step, the routing within each such
region is carried out in the detailed routing
stage.
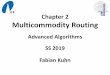
(b)(a)
Figure 1: Tessellation for (a) gate array/sea of gates and (b)
standard cell design.
Depending on the design style, different forms of routing graphs
are constructed to define the coarse
regions for global routing. For gate array, sea of gates and
standard cell designs, the entire routing area
is typically tessellated into a grid array, as shown in Figure
1. Note that the horizontal grid line usually
goes through the middle of a row of cells in the standard cell
design. The dual graph of this tessellation
is the routing graph G = (V, E), as shown in Figure 2(a). Each
vertex v ∈ V represents a grid cell and
each edge e ∈ E corresponds a boundary between two adjacent grid
cells. In custom design, on the
6
-
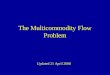
(a) (b)
Figure 2: The construction of a routing graph from the
tessellation for a two-layer routing scheme. Viaconstraints are
explicitly modeled in (b) but not in (a).
other hand, the cell placement is not regular as in gate array
or standard cell design styles. Therefore,
the routing graph is more appropriately based on the floorplan
of the building blocks. This is illustrated
for an example floorplan in Figure 3 where each rectangle
represents a building block. Like the routing
graph for gate array and standard cell designs, this routing
graph is also a dual to the floorplan graph.
Figure 3: Routing graph for custom design.
The global routing problem requires a set of nets N = {N1, N2,
..., Nk} to be routed over the routing
graph G. A net Ni, 1 ≤ i ≤ k is a set of pins (or terminals)
{vi,0, vi,1, vi,2, ...} ⊆ V , among which vi,0 is
the source pin and the others are sink pins. Under the coarse
assumptions made for global routing, each
pin is often assumed to lie at the center of the grid cell that
contains the pin. The routing problem for a
7
-
net Ni is to find an additional subset of vertices Vi,Steiner ⊂
V and a set of edges Ei = {ei,1, ei,2, ...} ⊂ E
to form a rectilinear minimum spanning tree Ti = (Vi, Ei), where
Vi = Ni ∪ Vi,Steiner.
As multiple nets are routed over the routing graph G, a common
boundary between two neighboring
grid cells may be crossed by wires belonging to different nets.
In terms of the graph representation, this
implies that the routing trees for these nets utilize a common
edge e ∈ E. The number of wires that
utilize an edge e ∈ E is called the flow (or demand), f(e), on
the edge. The number of available routing
tracks, which forms an upper bound on the allowable demand, is
referred to as the boundary capacity
(or supply), u(e). The ratio of flow to capacity f(e)/u(e) for
an edge is referred to as the density or
congestion, λ(e). If f(e) > u(e), then the overflow on the
edge is defined as φ(e) = f(e)−u(e); otherwise
the overflow is zero. The most fundamental statement of the
global routing problem is to route all of
the nets to ensure that for each edge e corresponding to a cell
boundary, the number of wires across it
does not exceed its routing capacity, i.e., φ(e) = 0,∀e ∈ E.
Another important consideration in routing global nets is to
manage the number of vias on the net,
and it is relatively easy to modify the above formulation to
address this objective. Let us consider the
routing problem under the reserved layer model, where the
routing direction for all wires in a layer is
identical. If a routing path makes a change in direction, i.e.,
a bend is induced, then a layer change is
necessitated, and wires along different directions must be
connected through a via at the bend position.
For several reasons, such as considerations of reliability,
area, and signal delay and quality, it is desirable
to minimize or control the number of vias during routing. One
way to do so is to limit the number
of allowable vias in each grid cell. Under this scenario, the
available via spaces in a grid cell may
also be modeled by an edge, and we can obtain a routing graph G
of the type shown in Figure 2(b)
for a two-layer routing problem. This routing graph is identical
to that defined earlier, except for the
introduction of via edges along the grid. For a via edge e, we
define f(e) as the number of vias utilized
in the corresponding grid cell and u(e) as the number of
available via spaces in the cell. In the literature,
some works explicitly consider this via constraint while others
do not, but these can often be extended
fairly easily to do so.
The specific constraints that are of particular importance vary
with the design style, but congestion
management is a uniformly important objective across all design
styles. For gate array/sea of gates
designs, the locations of the gates are fixed, and global
routing is an effort to route every net without any
8
-
overflow. The global router on this type of design is typically
evaluated through metrics that measure
the number of nets routed without overflow, or the total
overflow with all of the nets routed. In custom
design, the objective is similar, and is sometimes extended to
minimize the maximum congestion λ̂ over
all edges e ∈ E, even if no wiring overflow occurs. The
motivation for doing so is to provide a greater
flexibility to a subsequent detailed routing step within a grid
cell by evenly spreading out the global
wires over the grid. For traditional standard cell design in a
two-layer environment, only horizontal
wiring channels, which are the spaces between two adjacent row
of cells, are available. If a net crosses
two different channels, then feedthrough cells must be inserted
into each row of cells between the two
channels to allow the the inter-channel connection for this net.
The problem of assigning feedthroughs
to improve the routing quality constitutes a separate problem
that is not treated in this survey.
In addition to the congestion objective, wire length is an
important concern: large wire lengths imply
a larger power consumption and often, greater delays. It is not
hard to see that optimizing congestion
and wire length can often be competing objectives, and some
global routing works have attempted
to combine these objectives together. Another important
consideration in the deep submicron era is
that the interconnect delay, which consumes a major portion of
the clock cycle today and is projected
to continue to do so in the future. Therefore, timing
performance must be included into the set of
objectives considered during global routing. In addition,
crosstalk has become an increasingly vexing
issue and an attempt at crosstalk management during global
routing is of great value in an overall
strategy to manage coupling effects between wires.
3 Basic techniques
In this section, we summarize some of the basic techniques that
are frequently used to solve sub-
problems in global routing. These include maze routing, Steiner
tree construction, 0-1 integer linear
programming, and network flows.
3.1 Maze routing
One basic subproblem that is commonly encountered in global
routing is that of finding a shortest path
connecting two pins in the presence of wiring blockages. Perhaps
the most well known solution to this
problem is the maze routing [54,66] algorithm, which works on a
routing graph similar to the grid graph
9
-
in Figure 2(a). Each edge e has a cost c(e) associated with it,
and this cost may be different for different
routing directions. If an edge e is within the wiring blockage
area, then its cost c(e) = ∞; otherwise its
cost is finite and specified. A common cost metric is the
rectilinear edge length, counted in terms of
the number of grid cells.
The maze routing algorithm can be regarded as an implementation
of Dijkstra’s shortest path algo-
rithm [26] on the routing graph that minimizes the path cost.
For a given graph G = (V, E), where each
edge e ∈ E has a cost c(e), Dijkstra’s algorithm is able to find
a minimum cost path p(vs, vt), which is
set of consecutive edges, connecting a source vertex vs ∈ V and
a target vertex vt ∈ V . This algorithm
consists of a cost labeling step followed by a path tracing
phase. In the cost labeling phase, starting
from the source vertex vs, the accumulated cost from the source
to each vertex is labeled one by one in
a “wave expansion” manner until the target vertex is reached.
The minimum cost path is then traced
back from the target vertex to the source by retrieving the
bookkeeping information that is maintained
in the cost labeling phase. The runtime for this algorithm is
O(|E| + |V | log |V |) through a Fibonacci
heap implementation, where |E| is the number of edges and |V |
is the number of vertices.
If there is an optimal shortest path, maze routing is guaranteed
to find it. However, in practice, it is
found that the maze routing algorithm is slow and has large
memory requirements, and many efforts [78]
have attempted to improve its speed and memory usage. Another
well known class of methods is the
category of line probe-based algorithms (see, for example,
[34]), which do not rely on a grid graph.
While these methods are faster than maze routing, they are not
guaranteed to find a solution, even if
one exists. For a good description on maze routing and related
algorithms, the reader is referred to [78].
The maze routing algorithm has been extended to find a path
connecting two pins in such a way that
it favors a path that passes through less congested areas [68].
Since maze routing inherently considers
only one net at a time, this extension requires nets to be
considered one at a time, with the consequent
dependence on the order in which nets are processed. The
procedure computes the edge cost c(e), e ∈ E,
so that it reflects the current congestion at its corresponding
cell boundary, instead of a distance metric
such as the rectilinear length. There are several variations on
this cost definition: for example, one
10
-
could use the density λ(e), or λ2(e). Another effective cost
function, in our experience, is given by
c(e) =
f(e)+1u(e)−f(e) : f(e) < u(e)
∞ : f(e) ≥ u(e)
An extension to maze routing that considers congestion costs
explicitly can achieve the purpose of
not only helping the path to avoid wiring blockages, but also of
distributing the routing congestion,
and therefore this technique is frequently used in global
routing. A technique for timing driven maze
routing has been proposed recently in [43,44]
3.2 Steiner tree construction
source
sink
sink
(b)(a)
Steiner node
Figure 4: A three pin net connected by (a) a spanning tree and
(b) a Steiner tree.
Both maze routing and line probe methods are designed for
connecting two pin nets. However, in
practice, nets with more than two pins are often encountered in
the routing problem. A common
approach in dealing with a multi-pin net is to decompose it into
a set of two-pin nets. One way of
performing this decomposition is to begin with constructing a
minimum spanning tree (MST) over the
pins, and to maze-route each pair of pins that corresponds to an
edge in the MST. In Figure 4(a), a
possible solution using this procedure for routing a three-pin
net, decomposed into two two-pin subnets,
is shown. It is easily seen that such a procedure may not lead
to the best routing quality. The wire
length of a routing tree can often be reduced by introducing
extra nodes in addition to the given pins,
and constructing an MST over all of these nodes. The added nodes
are called Steiner nodes, and an
illustration is shown in an example in Figure 4(b).
In most VLSI routing problems, since all of the wires are either
horizontal or vertical, only rectilinear
11
-
Steiner trees (RST) are considered. One basic RST construction
formulation is to minimize the wire
length of the tree, i.e., to construct a rectilinear Steiner
minimum tree (RSMT). RSMT construction is a
well-known NP-complete problem and many approximation algorithms
have been developed. Several of
these are based on results that relate the wire length of the
optimal RSMT to that of the optimal MST.
When timing is considered, merely minimizing wire length is not
adequate. As a first approximation,
it can be observed that the length of the source-sink routing
path length plays an important role in
determining the signal delay. Several early works [5, 17] are
dedicated to finding a good compromise
between wire length and the maximum source-sink path length
(also known as the radius). Later
research efforts have directly considered delay metrics in the
tree construction procedure [7, 19, 22, 36,
37, 58, 85]. For surveys on Steiner tree construction techniques
for VLSI routing, the reader is referred
to [11,16,45].
Many of the Steiner tree construction algorithms that have been
proposed in the literature focus on
the optimization of a single net, and do not consider wire
congestion issues explicitly. Nevertheless, these
algorithms can be applied to serially route the nets, with the
most critical nets being routed in advance
of other non-critical nets. When the edge cost is defined
according to congestions, the Steiner minimum
tree algorithms may be applied directly to even out congestion
while simultaneously restraining the wire
length [13]. Steiner minimum tree algorithms are also often
employed in providing a set of candidate
routes to multicommodity flow based methods [3,9] and other
iterative techniques. These methods will
be described in detail later in this paper.
3.3 0-1 integer linear programming
Global routing may be formulated as a special type of
optimization problem, called a zero-one integer
linear programming (0-1 ILP) problem [61]. For a set of
candidate routing trees Ti = {Ti,1, Ti,2, ...} for
net Ni, we use variable xi,j to indicate if tree Ti,j is
selected for net Ni. The global routing problem
12
-
can then be formulated as:
Minimize λ̂
Subject to:∑
Ti,j∈Ti xi,j = 1, ∀Ni ∈ N
∑
i,j:e∈Ti,j xi,j ≤ λ̂u(e), ∀e ∈ E
xi,j = {0, 1}, ∀Ni ∈ N ,∀Ti,j ∈ Ti
(1)
The first constraint, along with the restriction of the xi,j ’s
to {0, 1}, requires that one tree be chosen
for each net. The second constraint and the objective together
ensure that the maximum congestion is
minimized.
One straightforward approach to this problem is to first solve
the continuous linear programming
relaxation, obtained by replacing the third constraint with xi,j
∈ [0, 1], since practical solutions to
linear programming problems can be found in polynomial time
[46], but the 0-1 ILP problem is NP-
complete. The fractional solution thus obtained may then be
transformed to integer solutions through
rounding techniques such as randomized rounding, as in [71]. An
alternative approach in [83] applies
an interior point method in conjunction with column generating
techniques [39] to solve the 0-1 integer
linear programming problem.
In practice, the global routing problem is seldom solved
entirely using the 0-1 ILP formulation since
the problem size can grow to be very large. More often, the ILP
technique is embedded into a larger
overall global routing strategy, such as solving a subproblem at
one hierarchical level of a hierarchical
routing procedure [8,33,41,62,81], where the complexity of the
computing the optimal solution to a 0-1
ILP is manageable.
3.4 Network flow model
The objective of the global routing problem is to allocate a
limited set of resources evenly to a given
set of demands. Intuitively speaking, the nature of this problem
is quite coherent with the problem
of finding optimal flows in a network [52], and several research
efforts have pursued this as solution
technique.
A network is a connected graph consisting of a set of vertices
and edges; for the global routing
problem, this graph is a minor modification of the routing graph
in Figures 2 and 3. In a basic network
13
-
flow model, there are two special vertices: one called the
source and another called the target or sink.
A certain amount of flow, called the demand, for one commodity
must be shipped from the source to
the target vertex. Each edge has a flow capacity, which
represents the upper bound for the flow that
is allowed to pass through the edge. One version of the problem
requires the transport of as much
flow as possible through the network without exceeding any edge
capacity, and this is referred to as
the max-flow problem. Another version assigns a cost per unit
flow to each edge, and sets the problem
objective to be the minimization of the total transportation
cost through the network for a given flow
from the source to the sink; this formulation is called the
min-cost flow problem. The appealing feature
of the network flow problem is that it can be solved in
polynomial time to obtain an optimal integer
solution when edge capacities are integers. A good description
of network flow methods can be found
in the book by Ahuja et al. [2]. While it is not possible to
model the entire global routing problem as
a single commodity network flow problem, this technique can be
employed to solve some subproblems
in global routing [14,38,65] and can lead to high quality
solutions.
There is a special type of network flow model that can be
applied directly to the global routing
problem. This is the multicommodity flow problem, where many
commodities must be shipped on a
common network, and each commodity has its own sources and
targets that may be different from
that for other commodities. In the mapping to the global routing
problem, each net can be treated
as a commodity. An advantage of this approach is that the
multicommodity flow problem can be
formulated as a linear programming problem. Since linear program
solvers are slow for the sizes of
problems encountered in global routing, research on the
multicommodity flow problem has mostly
focused on heuristics and combinatorial approximation
algorithms. These methods will be introduced
in the following sections.
4 Sequential routing techniques
Perhaps the oldest and most straightforward strategy for routing
multiple nets is to select a specific
order and to then route the nets sequentially in that order. The
major advantage of this approach is
that the congestion information for previously routed nets can
be taken into consideration while routing
a given net. For example, in early algorithms that operated by
decomposing multi-pin nets into two-pin
nets, each net was routed using techniques such as the obstacle
avoidance version of maze routing or
14
-
the line probe method. In these approaches, a cell boundary is
said to be open to path searching until
all of the tracks have been occupied by previously considered
nets; after that point, the boundary was
treated as an obstacle.
The drawback of this sequential approach is that the quality of
the solution depends greatly on the
order in which nets are processed, and that it is hard to find a
good net ordering. Under any net
ordering, it is often more difficult to route the nets that are
considered later since they are subject to
more blockages. Moreover, there is no feedback mechanism that
permits these nets to feed information
back to the nets routed earlier with directions on regions that
should be left free for their routes. Early
work by Abel [1] concluded that there is no single net ordering
technique that consistently performs
better than any other ordering method. Despite the controversial
net ordering issue, there are several
good research results on sequential routing that have been
reported, mostly through the use of iterative
loops that feed back congestion information from the later
routed nets to the earlier routed nets.
4.1 Force-directed routing
In [31], the global routing problem for two-pin nets is solved
by emulating a particle movement in a force
field. This approach assumes that a net order is given and
routes each net sequentially. For each net, a
particle departs from from the source pin and moves toward the
target pin under the field generated by
the source pin, target pin, unrouted pins in other nets, and
routed wires. The trajectory of this particle
motion forms the routing path connecting its source and target
pin.
attractive force repulsive force circular force
Figure 5: Various types of forces in force-directed routing.
There are three types of forces, as illustrated in Figure 5.
When a particle moves to a certain position,
an unrouted pin in another net will exert a repulsive force
along the direction of the line joining the
15
-
net being routed
particle
unrouted pin of other nets
routed wire
(b)
target
source
A
B
source
target
(a)
Figure 6: An example of the forces exerted on a particle: (a) a
repulsive force from an unrouted pinin another net that does not
lie in same row or column as the particle. (b) a circular force
from anunrouted pin in another net in the same row or column as the
particle, or from a routed wires in thesame row or column.
particle and the unrouted pin, as shown in Figure 6(a). The
magnitude of the force is 1pr2
, where p
is the number of the total unrouted pins and r is the distance
between the particle and the unrouted
pin. The source pin generates a similar repulsive force with a
magnitude of 1r2
. To a particle in motion,
the only attractive force is from the target pin along the line
joining the particle and the target, and
the magnitude of this force is 1r1.5
, which is generally greater than any other kind of force, so
that the
particle can be guaranteed to reach the target. The direction of
the combined force from the source and
the target is snapped to the direction of motion of the particle
direction if the two directions are not
too different, so that the number of bends can be reduced.
If an unrouted pin or a segment of routed wire from a different
net is in the same row or column as
the article, it will exert a circular force of 1r2
. If this force is horizontal (vertical), it will take the
same
direction as the horizontal (vertical) component of the combined
force from the source and the target,
as illustrated in Figure 6(b). This force-directed method can be
parallelized by letting the particle for
every net move simultaneously.
4.2 Sequential routing through Steiner min-max tree
construction
A Steiner min-max tree (SMMT) is a Steiner tree whose
maximum-weight edge is minimized over all
Steiner trees. In [12], Chiang et al. solve the global routing
problem by constructing Steiner min-
max trees for each net sequentially, defining each edge weight
according to estimates of the routing
congestion.
16
-
The algorithm sorts the nets according to the perimeter of their
bounding box and routes one net at a
time, with the nets that have a smaller bounding box being
routed earlier. The routing tree construction
is carried out on a routing graph of the type described in
Section 2, with the edge weights on the graph
being proportional to the wire congestion. For a certain net, a
cell is called terminal cell if it contains a
pin of this net; otherwise, it is called non-terminal cell. An
optimal Steiner min-max tree that spans the
net on the routing graph is obtained through a two-step
procedure in polynomial time. In the first step,
a minimum spanning tree over all of the cells in the routing
graph is constructed. In the second step,
any degree-one non-terminal cells are eliminated from this MST.
It can be proven that the resulting
tree is an optimal Steiner min-max tree. The edge weights are
updated dynamically after the routing
of each net, reflecting changes in the congestion.
Intuitively speaking, a Steiner min-max tree attempts to
minimize the maximum edge weight, i.e.,
to minimize the wire congestion. However, the procedure does not
consider wire length in constructing
the SMMT. Finding a Steiner min-max tree with minimum wire
length (MSMMT) is shown to be
an NP-complete problem, and the authors of [12] propose a
heuristic algorithm, based on the SMMT
algorithm, that tries to find the MSMMT. In this heuristic, a
wire length limit ratio ρ > 1 is defined,
and the routing is performed over several iterations. Initially,
the limit ratio is set to be tight, in a
range that lies in the interval (1, 2). In each iteration, the
nets are routed one at a time using the
SMMT algorithm, in the ascending order of the semiperimeter of
the bounding box for the net. After
this SMMT solution is obtained, its wire length is evaluated to
check whether it is less than ρ times a
lower bound on the wire length, given by the semiperimeter of
the bounding box for the net. If not,
this routing solution is rejected, and this net will be
considered for routing in the next iteration. The
value of ρ is increased from each iteration to the next so that
every net can eventually be routed.
At the end of this iterative SMMT phase, this method iteratively
reroutes each net using the minimum
spanning tree algorithm in the same constant order. A rerouting
result is accepted only when it is better
than the solution of SMMT phase.
4.3 Minimum weighted Steiner tree
In the SMMT based global routing procedure, the primary
objective is to minimize the maximal con-
gestion and the secondary objective is to minize wire length. In
[13], another sequential global routing
17
-
method is developed in an effort to simultaneously minimize
congestion and wire length. This method
routes the nets sequentially using a minimum weighted
rectilinear Steiner tree (WRST) approximation
algorithm.
The example shown in the work of [13] is based on a custom
design such as that shown in Figure
7(a), where the routing area is divided into a set of small
regions. Each region is assigned a weight
that is defined according to the complexity and wire congestion
of the region. The shaded rectangles
correspond to macros that act as wire blockages, and the weights
in these regions are set to ∞.
This work constructs a routing graph for a net as the union of
the Hanan grid for the net and the
grid formed by extending the borders of each region until they
encounter a blockage or the boundary.
For example, the routing graph for the design shown in Figure
7(a) is illustrated using dashed lines
in Figure 7(b). For a wire that is routed along a border between
two regions with different weights,
it is assumed that the weight with a smaller value is chosen.
The weight of an edge is the product of
the edge length and the weight of the region the edge belongs
to, and the objective of the procedure
is to minimize the cost of the weighted rectilinear Steiner
tree. It can be shown that there is always a
minimum weight path connecting two nodes using edges that lie
exclusively on this routing graph.
(a) (b)
4
5 3
3
Infty
Infty
22
2
Infty
9
2
4
Figure 7: (a) A set of regions in a layout, each with a
specified weight. (b) A routing graph and aminimum weighted Steiner
tree for this layout.
As in the SMMT-based approach, the nets are first sorted in
increasing order of the bounding box
size and are routed sequentially in this order. The weights for
all regions are updated after each net is
routed.
18
-
Each net is routed by means of a minimum weighted Steiner tree
over the net. Based on a proof
that the weight of a minimum spanning tree (MST) is at most two
times the weight of optimal WRST
solution, the tree construction proceeds by beginning with an
MST skeleton and heuristically attempting
to maximize the overlaps in its embedding on to the routing
grid. For the net in Figure 7(b) whose pins
are indicated by the three solid squares, the MST is shown by a
set of thickened dashed lines. After the
MST is obtained, each edge in the MST is instantiated into an
actual wire route one by one, with the
shortest edges being embedded first. Wherever possible, a wire
route is merged with already embedded
wire routes from the same net to reduce the wire length. If
there is more than one minimum weight
path for an edge in the SMT, the one that can deliver the
largest wire length reduction is chosen. Since
this process can only decrease the wire length from the MST
result, the final result has at most twice
the wire length of the optimal WRST’s in the worst case.
5 Region-wise routing
One way to avoid the net ordering problem is to route one region
at a time instead of one net at a
time. This alters the problem to one of determining the order in
which regions should be considered,
and this may be decided according to net distributions, as in
the method described in Section 5.1. In
an alternative approach outlined in Section 5.2, inter-row wires
are routed first, and the intra-row nets
are then routed in the order of horizontal wires, vertical wires
and wires with both orientations.
5.1 Unique pattern first and outer rim first routing
In an investigation of the properties of net distributions, Li
and Marek-Sadowska [57] made two obser-
vations. Firstly, some nets or subnets may have to take certain
unique patterns, regardless of what the
final feasible routing is, and it is useful to identify and
route these first. Secondly, in typical layouts
the wiring is crowded at the center of the chip and relatively
sparse at the outer rim. Therefore, it is
better to start routing from the outer rim of the entire routing
area and then shift the routing toward
the center step by step. Although this work was specifically
directed towards gate array designs, the
key ideas can be extended to other problems.
The following definitions are useful in describing the algorithm
and are related to an abstraction of
the problem in terms of a routing graph, G.
19
-
Definition 5.1 (Non-Pass-Through (NPT) cell) A cell is said to
be a non-pass-through (NPT)
cell if the number of unconnected pins of different nets inside
it is equal to or less by one than the total
remaining channel capacities on its four boundaries.
Definition 5.2 (Outermost and inner meshes) In a particular
planar drawing of the cell graph G,
where the boundary of the exterior face of a planar embedding of
G corresponds to cells at the boundary
of the chip, the outermost mesh is a subset of nodes and edges
in the routing graph G that bounds the
exterior face from G, and an inner mesh is a subset of nodes and
edges in the routing graph G that
bounds an area where edges are missing.
An inner mesh exists when there is a grid edge whose wiring
capacity is zero. An example illustrating
the idea of the outermost mesh and the inner mesh is shown in
Figure 8.
meshinner
(a)
meshoutermost
capacity > 0capacity = 0
(b)
Figure 8: An example of outermost mesh and inner mesh.
The algorithm is based on the following properties when the
global routing problem has a feasible
solution with no wiring overflow.
Lemma 5.1 If there is a two-pin net, Nk, with pins in two
adjacent cells with non-zero wiring capacity
at their common boundary, then there exists a feasible routing
solution in which Nk is wired through the
common boundary of the two adjacent cells.
Lemma 5.2 If the total wiring capacity on a closed region
boundary is U , and there are P pins inside
such that P > U , then at least P − U of them must be
connected within this region.
20
-
Lemma 5.3 If there are two adjacent NPT cells, ga and gb, with a
non-zero wiring capacity uab on the
common boundary, and there are uab or fewer nets with pins in
both ga and gb, then there is a feasible
solution in which these pins are connected by the shortest path
between ga and gb.
This algorithm proceeds by first finding pairs of pins in
adjacent cells and connects them directly
according to Lemma 5.1. Next, it identifies the NPT cells from
this partial routing result and determines
unique routes according to following rules:
1. Nets with pins in the neighborhood of NPT cells must find
unique routes that do not pass through
the neighboring NPT cells.
2. By Lemma 5.3, nets that have two pins in adjacent NPT cells
are connected through the common
boundary of the adjacent NPT cells.
3. If there is a net with one pin located in an NPT cell and the
other in its non-NPT neighbor, they
are connected directly across their common boundary.
After these unique patterns have been routed, some new NPT cells
may be generated due to the
consequent reduction in the wiring capacity. These cells are
identified and the process is repeated until
no such new cells are created.
In the next phase, the routing proceeds along the outermost mesh
and the inner meshes. Any nets
with more than two pins within a mesh are connected within the
mesh, as long as such a connection
does not lead to barriers separating the routing graph into
disjoint regions. Those pins that remain
unconnected are connected to neighboring non-mesh cells. After
one layer of outermost mesh is routed,
the outermost mesh is expanded inwards. Similarly, a routed
inner mesh is expanded outward. If
a routing decision at an outer mesh is found to be incorrect
when the inner meshes are routed, the
algorithm resorts to backtracking to correct the previously made
decision. This procedure is repeated
until all of the cells are routed. For a routing instance with k
nets to be routed on a p × q grid, this
algorithm has a complexity of O(k2(log k + pq)).
21
-
terminal GRC
via GRC
possible path segment
Figure 9: Candidate paths for inter-row connections in the
algorithm proposed by Thaik et al.
5.2 Routing in order of wire orientations and in terms of
rows
In [81], Thaik et al. designed a global routing algorithm for a
sea-of-gates environment that proceeds
edge-wise instead of net-wise. They consider the global routing
problem for three layers such that top
and bottom layers are reserved for vertical wires and middle
layer is devoted to horizontal wires. The
routing region is tessellated into a tile graph as shown in
Figure 9, and each row is further divided into
two subrows separated by the thin dashed lines.
The algorithm consists of three phases. In the first, each net
that spans multiple rows is connected
by a vertical path in the top layer that covers the vertical
span of the entire net. The end point of the
path may either be a terminal GRC (global routing cell) that
contains a pin of the net, or a via GRC.
For a specific net, there could be several paths that cover its
vertical span, as illustrated in Figure 9,
and only one such path needs to be chosen. This choice should be
made while ensuring that there are no
wiring capacity overflows. This decision process is implemented
in [81] by means of a zero-one integer
linear programming (ILP) formulation that is solved using a 0-1
ILP package.
In the second phase, connections within each row are considered.
Recall that each row consists of
two subrows. If two pins lie in two adjacent subrows of the same
row and are in the same column,
they are connected by a straight vertical edge in the lowest
routing layer as long as no overflow occurs.
Next, straight horizontal connections are made on the middle
layer between pairs of terminal-GRC’s,
via-GRC’s and/or metal-3 paths. These problems are also
formulated and solved as 0-1 ILP problems.
22
-
After phase two, there may still be nets whose routing has not
been completed due to wiring con-
straints. These remaining connections are completed in the third
phase, which is also constrained to
routing within a row. In this step, multi-bend routes are
considered, and the route for each row is solved
as a 2×N routing problem using a hybrid hierarchical approach,
where the routing at each hierarchical
level is solved as a 0-1 ILP problem.
6 Move-based heuristics
Move-based heuristics are commonly used to find the optimal
solutions to computationally difficult
problems. Arguably, the most well known move-based heuristic is
simulated annealing, developed by
Kirkpatrick et al. [47]. The motivation for this approach is
that in solving computationally difficult
combinatorial optimization problems, greedy heuristics are
easily trapped at local minima because only
those moves that reduce the value of the cost function are
accepted. In simulated annealing, a certain
amount of hill-climbing is permitted, providing an increased
chance of finding the global minimum.
More precisely, any cost-decreasing move is always accepted, and
a cost increasing move is accepted
with a probability of e−∆C/T , where ∆C is the increase in the
cost and T is a parameter known as the
temperature. It can be seen that the less the increase on the
cost, the more likely the move is accepted.
The procedure works iteratively, with an outer loop starting
from a high temperature where virtually
all moves are accepted, and gradually “cooling” the temperature
so that the likelihood of accepting
cost-increasing moves is progressively diminished. At each
temperature, a number of moves are carried
out, which are either accepted or rejected according to the
criterion outlined above. This process is said
to be analogous to the cooling process during annealing of
metals.
The simulated annealing technique is applied to global routing
in [84], where only two-pin nets are
considered and the number of bends for each net is no more than
two. In the well-known TimberWolf
package [76], simulated annealing is applied to both placement
and global routing. In this package, a set
of candidate routing trees is created for each net and one of
the trees is randomly chosen as the initial
solution. Each move implies a switch from one tree to another
for a net. The cost to be minimized is
the total wiring overflow over the entire routing graph. The net
whose topology is to be changed by a
move is randomly chosen from a grid cell boundary where an
overflow exists.
Other move-based techniques applied to global routing include
simulated evolution [10], genetic al-
23
-
gorithm [28] and tabu search [91].
7 Rip-up and reroute
Another common approach to avoid the net ordering dilemma is the
rip-up-and-reroute method. This
approach starts by routing each net individually without
considering congestion, usually constructing
Steiner minimum trees for each net. After all of the nets have
been routed, the congested areas are
identified, and the nets in those areas are ripped up and
rerouted through less congested areas. This
rerouting is often based on the maze routing algorithm. Although
this method sounds very simple, it
is surprisingly effective and has long been the most commonly
used global routing method in industry.
Moreover, it can always be combined with other global routing
methods as a post-processing step
to further improve the routing quality. The degrees of freedom
in this approach are related to, for
example, the different strategies for choosing the net to be
rerouted, or the order in which boundaries
with overflow are processed.
An early and influential rip-up-and-reroute global routing
method was proposed by Ting and Tien [82].
Broadly speaking, their procedure first selects a set of
congested grid cell boundaries and then chooses
the subset of nets that pass across these boundaries to be
rerouted.
1
1
2
2
3
3
boundary full/overflow
before reroute
after reroute
Figure 10: An example showing the overflow along a full loop.
This overflow can be reduced only whenthere is at least one net
that crosses the loop twice.
A special case corresponds to the situation where the set of
saturated or oversaturated boundaries
forms a closed loop, as illustrated by the thickened dashed
square in Figure 10. Along this loop, each
boundary is either full or has an overflow, and at least one
boundary has an overflow. In this case, if a
24
-
wire crosses this loop only once, as is the case for net 1,
rerouting this net will not satisfy the congestion
constraints. More generally, if all of the nets pass through the
loop only once, then no feasible solution
exists. On the other hand, if a net crosses this loop twice and
all of its pins lie either entirely within or
entirely outside the loop, as is the case for nets 2 and 3,
respectively, then we can reroute these nets to
ensure that the devious routes taken by these double-crossing
nets are altered to lie entirely within or
without the loop. The first step of Ting and Tien’s algorithm is
to identify such loops and to reroute
the two-crossing nets.
N1N2
N3
N4
N5N6
N7N8
N9N10
BoundaryNet
N4
N3
N5
N6
N7
N8
b1
b2
w1 = 1
b3w3 = 1
w2 = 1b1
b2
b3
(a) (b)
Figure 11: Mapping the problem of choosing nets to be rerouted
on to the problem of finding a coveron a bipartite graph.
When no such loop exists, Ting and Tien’s algorithm selects a
set of k > 1 most congested boundaries
to reroute. There are typically many nets that run across these
boundaries, and the technique employed
to choose the nets to be rerouted is illustrated through the
example in Figure 11(a). In this example,
the wiring capacity on each boundary is assumed to be two, and
it is easily verified that there are
three boundaries, b1, b2 and b3, with overflow. A bipartite
graph is then constructed as shown in Figure
11(b). The group of vertices to the right correspond to the
overflow boundaries, and those to the
left correspond to the nets that cross those boundaries. An arc
is set up between a net vertex and a
boundary vertex if the net crosses this boundary. Each boundary
vertex bi has a weight wi equal to the
overflow of the corresponding boundary. A minimum cardinality
cover set from the group of vertices to
the left is selected to cover every boundary vertex wi times,
and the nets in this cover set are selected
to be rerouted.
25
-
Another variant of rip-up-and-reroute method is due to Nair
[67]. In this procedure, every net is
ripped up and rerouted based on the observation that a wire in a
non-overflow area may be able to
move further and to a less congested area to leave some room for
wires in adjacent congested areas.
Another feature is that every net is rerouted in the same
constant order iteratively. The rationale
for this is that the routes that are chosen early in an
iteration are based on less accurate congestion
information compared to the routes that are determined later,
and therefore, these early routed nets
should be corrected first in the next iteration as well.
(a)
subtree T2
v’
v1
v2
v’ = source
(b) (c)
v1
v2
v’ = source
targettarget
subtree T1
Figure 12: An example of rerouting using a network flow
model.
In [65], Meixner and Lauther reroute a set of nets
simultaneously using a single commodity min-
cost network flow formulation, so that the net ordering problem
in rerouting is avoided. The method
successively considers each node v′ ∈ V for a routing graph G =
(V, E) and reroutes the nets that have
either a sink node or a Steiner node with degree greater than
two at v′. For each such net, its routing
edges from v′ to the next sink or Steiner node with degree
greater than two are ripped up, leaving
behind a set of partial routing trees. For example, two nets N1
and N2 may leave behind the trees T1
and T2, respectively, shown in Figure 12(a).
The problem is now to connect nodes at v′ to subtrees T1 and T2
for nets N1 and N2 without causing
a wiring overflow, and simultaneously minimizing the wire
length. To solve this problem, the partial
routing graph is transformed into a network flow model as shown
in Figure 12(b). Each undirected
edge is mapped on to a pair of directed edges whose capacity is
the corresponding wiring capacity and
whose cost is the edge length. Two pseudo nodes v1 and v2 are
added for nets N1 and N2, respectively,
26
-
together with a target node. Every node in partial tree Ti is
connected to the node vi, i = 1, 2, by means
of a directed edge, and finally, each vi is connected to the
target node. These edges all have a cost
of zero and capacity of one. The node v′ serves as the source
node, and a minimum cost flow for this
network is determined for a total flow of p units through the
network, where p is the number of partial
routing trees. Such a flow can be used to determine an optimal
solution, if it exists, that satisfies wiring
capacities and minimizes the wire length. A sample solution for
our example is illustrated in Figure
12(c).
In addition to avoiding net ordering problem, this method has
the advantage that an optimal integer
solution to this single commodity flow problem can be obtained
in polynomial time and no rounding
procedure is required, since the single commodity network flow
problem has a polynomial time optimal
integer solution if each edge capacity is an integer [2].
However, the quality of the solution depends on
the order in which the nodes in G are processed, though this
node ordering problem is less severe than
the original net ordering problem.
pin
grid line
wire
switchable segment
two possible configurations
Figure 13: An example of a switchable segment.
In [55], Lee and Sechen proposed a rip-up-and-reroute strategy
using a multi-stage refinement proce-
dure, instead of applying maze routing immediately after initial
tree construction. As in other rip-up-
and-reroute methods, they initially construct Steiner trees for
each net without considering congestion.
Next, wires are ripped up and rerouted to reduce congestion in
four successive stages. One scenario is
related to the idea of switchable segments, illustrated in
Figure 13. In a gate array or a standard cell
design, an equivalent pair of pins at the top and bottom of a
cell is treated as a single pin located at
the middle of the row where a horizontal grid line goes through.
In stage one of the rerouting process,
27
-
one of these two options for each switchable segment is chosen
in a way such that the congestion is
minimized. In stage two, the L-shaped wires in the initial
Steiner trees are allowed to be rerouted as
Z-shaped connections to reduce congestion; note that there is no
wire length increase in either stage
one or stage two. In stage three, connections that were
originally straight in the initial Steiner trees are
allowed to detour and become U-shaped connections, with a bound
on the permissible increase in the
wire length. During this stage-wise refinement, the algorithm
attempts to control the wire length and
the number of bends. If some overflow still remains after these
three stages of rerouting, traditional
maze routing is finally employed to further reduce the
congestion in stage four.
In [60], a customized routing graph is constructed for global
routing using multilayer macrocells, or
building blocks. This routing graph is similar to the graph in
Figure 7(b), except that it is in three
dimensions to reflect the multilayer design. The authors extend
Wang’s heuristic [87] to construct
Steiner trees for each net separately at the beginning. After
the initial tree construction, their method
starts by inspecting every grid cell to see if the number of
wires (vias) that pass through it exceeds the
available routing tracks (via spaces). Next, every
over-congested cell is processed in order of the most
congested cell first. For each such over-congested cell, a new
route is found for every net in it that can
avoid all the over-congested or full cells, if such a route
exists. These routes are maintained in a priority
queue with the top route having the minimum wire length increase
compared to its corresponding old
route. After all of the possible new routes have been found, the
top new route is popped out from the
queue and used to replace its corresponding old route repeatedly
until the over-congestion problem for
this cell is resolved.
8 Multicommodity flow based approach
Although the sequential, rip-up-and-reroute and other heuristics
may be effective in practice, they
cannot provide a certain answer as to whether or not a feasible
solution exists. In other words, if they
fail to find a feasible solution, it is not clear whether this
is attributable of the non-existence of a feasible
solution or because of shortcomings of the heuristic. Moreover,
when a heuristic does find a feasible
solution, it is not known whether or not this solution is
optimal, or how far it is from the optimal
solution.
These questions may be answered if we formulate and exactly
solve the global routing as a multicom-
28
-
modity flow problem. A multicommodity flow operates on a network
that is a graph G = (V, E), where
V = {v1, v2, ..., vn} is a set of n vertices and E = {e1, e2,
..., em} is a set of m edges. Some researchers
define this network as a directed graph while some others define
it as a undirected graph. Generally
speaking, this difference affects only the form of the problem
formulation. For multi-pin net global
routing, an undirected graph formulation is more convenient.
Over this network, k commodities must be transported from some
vertices to other vertices. In global
routing, we can treat each net as a commodity and we can say
that there is a set of N = {N1, N2, ..., Nk}
commodities that are to be shipped. For each commodity Ni, a
certain amount di, namely the demand,
is required to be shipped. In global routing, each Ni
corresponds to a net with more than one pin
and each di is always one. Each edge has a flow capacity u(e)
and cost c(e), which have the same
interpretation as in the global routing problem formulation. The
routing can be expressed in terms
of either edges or trees. In the edge-based expression, a
variable fi(e) represents the amount of flow
passing through edge e ∈ E. Note that fi(e) is always
non-negative in an undirected network while it
can be any real number for a directed network. The tree-based
expression assumes that there is a set
of possible routing trees Ti = {Ti,1, Ti,2, ...} for each net
Ni. The binary variable xi,j is set to one if
Ti,j ∈ Ti is selected for net Ni; otherwise, xi,j is zero. Of
course, it is impractical to enumerate all of
the possible trees and these trees are usually generated on the
fly in practice.
Typically, there are two constraints that must be satisfied in a
multicommodity flow problem. The
first is the demand constraint, which requires that the amount
of flow shipped for each commodity
should be equal to its demand, and the second is the bundle
constraint, which states that the total
amount of flow f(e) passing through each edge e ∈ E should not
exceed its capacity u(e). In the
fractional flow version, the decision variables fi(e) or xi,j
may be any non-negative real number. In the
zero-one integer flow version, there is the third zero-one
integer constraint that regulates that fi(e) and
xi,j must take a value of either zero or one. The global routing
problem maps on to the zero-one integer
version. Due to computational complexity issues related to
integer programming and the large size of
the global routing problem, the integer flow problem here is
often relaxed to the fractional formulation,
whose solution is transformed to an integer solution after a
rounding procedure.
Besides these constraints, there are several variations on the
objective function for the multicommod-
ity flow problem. One formulation tries to minimize the total
cost of transportation, and this is called
29
-
the min-cost multicommodity flow problem. Another formulation
attempts to minimize the maximum
edge density (as defined in Section 2) and is called the
concurrent flow problem.
8.1 The Shragowitz-Keel algorithm
The work by Shragowitz and Keel in [79] is perhaps the first
reported work on global routing using
the multicommodity flow model. Unlike many subsequent efforts
using this formulation, they did not
employ an off-the-shelf multicommodity flow algorithm, but
instead, developed their own polynomial
time algorithm. Superficially, this algorithm looks similar to
the rip-up-and-reroute method and the
authors investigated the feasibility of convergence and the
convergence rate. However, no statements
about the optimality are made with the analysis.
Their approach is based on a directed network and is restricted
to two-pin nets. For each net Ni, one
of its pins vs ∈ V is selected as source where a unit of flow is
generated, i.e., the net flow of net Ni at
this vertex di(vs) is 1. The other pin vt is the sink where a
unit of flow dissipated, i.e., the net flow of
net Ni is di(vt) = −1. For simplicity, in this description, a
directed edge from vertex v to v′ is denoted
by the vertex pair (v, v′). The Shragowitz-Keel formulation of
the global routing problem is as follows:
minimize∑
∀e∈E
∑
∀Ni∈N c(e)|fi(e)|
subject to:∑
v′:(v,v′)∈E fi(v, v′) −
∑
v′:(v′,v)∈E fi(v′, v) = di(v), ∀Ni ∈ N ,∀v ∈ V
∑
∀Ni∈N |fi(e)| ≤ u(e), ∀e ∈ E
fi(e) ∈ {0,±1}, ∀Ni ∈ N ,∀e ∈ E
(2)
Initially, this algorithm discards the bundle constraint to
obtain a min-cost solution where the edge
cost c(e) is defined to be the rectilinear edge length. Next, it
iteratively reduces the violations on the
bundle constraint while maintaining a minimum feasible cost. The
first step is solved individually for
each net and any shortest path algorithm may be used. As in
other methods, this step corresponds to
finding the minimum cost route for each net while ignoring the
effects of the other nets. The algorithm
then identifies the subset of edges Eφ with maximum overflow φ =
max(φ(e),∀ ∈ E) and the subset of
edges Eφ,φ−1 with an overflow of either φ or φ − 1. If φ = 0,
then the algorithm is done. The cost of
each edge in Eφ,φ−1 is updated to infinity and all other edges
keep their cost unchanged. The subset
Nφ is defined such that each commodity or net in it has at least
one fi(e) = 1 such that e ∈ Eφ. The
30
-
subset of Nφ,φ−1 is defined in a similar manner. Based on the
updated cost, the shortest path algorithm
is executed for every commodity in Nφ. If there is a new path
with a cost of infinity, this algorithm
checks a feasibility condition which can verify whether there is
a feasible solution for this problem. If the
problem remains infeasible, this algorithm perturbs the flows
and reruns the iterations again. If there
is no new path with a cost of infinity, this algorithm chooses
the commodity Ni that has the smallest
increase in cost from the old path to the new path, and replaces
its old path with the new path. This
process is repeated until there is no overflow.
8.2 The Raghavan-Thompson rounding method
One interesting formulation for multi-terminal nets routing to
multicommodity flow model is conducted
by Raghavan and Thompson in [72], where the exposition of the
algorithm is restricted to nets with
exactly three pins, although the authors state that
generalizations to multiple pins are possible. This
formulation is also based on a routing graph G = (V, E), and the
objective is to minimize the maximum
flow among all edges, i.e., minimize f̂ = max(f(e),∀e ∈ E).
Consider a situation where each net Ni ∈ N consists of three
terminals vi1, vi2 and vi3. In the
formulation, Raghavan and Thompson assume that one Steiner node
is needed for each net and an
indicator variable si(v) ∈ {0, 1} is used to denote whether or
not each vertex v ∈ V is the Steiner node
for net Ni. The global routing problem is then formulated as a
multicommodity flow problem in which
si(v) units of flow are to be shipped from each of vi1, vi2 and
vi3 to vertex v ∈ V .
This problem is first relaxed to be a linear programming problem
and solved by any linear program
solver. The next crucial task is to obtain the integer solution
from the optimal linear program relaxation
solution. We use f̃(e) and s̃i(v) to represent the fractional
results from the linear programming and
denote the optimal max-flow as f̃ . Then these values must
satisfy the following conditions.
∑
v∈V
s̃i(v) = 1, ∀Ni ∈ N (3)
f̃(e) ≤ f̃ , ∀e ∈ E (4)
Here all of the f̃(e), s̃i(v) ∈ [0, 1]. We express a set of
solutions as S and start with the initial solution
31
-
S0 as:
S0 = {f̃ , f̃(e), s̃i(v),∀Ni ∈ N ,∀v ∈ V, ∀e ∈ E}.
The rounding procedure proceeds for k stages to get a sequence
of solutions S1, S2, ..., Sk, where k = |N |.
In each stage i, the flow of one net Ni is rounded to integers
and will not be changed later, and the
solution proceeds from Si−1 to Si. For each solution S, a
potential function is defined as:
Ψ(S) =∑
e∈E
∏
Ni∈N
[fi(e)ω + 1 − fi(e)], (5)
where the parameter ω > 1 will be defined later.
Each stage consists of two phases. The Steiner node for the net
being processed is determined in
phase one and the integer flow to the Steiner node is obtained
in phase two. In phase one of stage i, a
vertex vp is identified so that si(vp) is forced to 1 and si(v)
= 0, v 6= vp, v ∈ V . If we denote the flow
from any vertex vij ∈ Ni to vertex v ∈ V as fi(e, v), selecting
vp as Steiner node for Ni also implies that
we let fi(e, vp) = f̃i(e, vp)/s̃i(vp) and fi(e, v) = 0 for all
other vertices v. This corresponds to picking
paths from each pin of the net to the Steiner point. If the
solution after Steiner node selection is S′i,
then the Steiner must be chosen in a way so that Ψ(S′i) is
minimized. The authors have proved that
this procedure ensures that Ψ(S′i) ≤ Ψ(Si−1).
After the Steiner node is selected, the fractional flows from
net Ni to vertex vp, f′i(e, vp), are rounded
to be either 0 or 1 in phase two. Let us consider how to round
the flow from one of the pins vi1 to
vp. Through a so-called path stripping procedure, the fractional
flow from vi1 to vp is organized into a
set of paths {P1, P2, ...}, each with a certain amount of flow.
The summation of flow over all of these
paths must be one. The flow along path Pl is now selected to be
one such that the solution from this
choice S′i(Pl) minimizes the potential Ψ(S′i(Pl)). After the
flows from all three pins of net Ni have been
rounded, we can obtain the solution Si, and it is proven that
Ψ(Si) ≤ Ψ(Si−1).
If the parameter ω is chosen so that it satisfies the
relation
[eω−1
ωω]f̃ =
1
m,
32
-
then the upper bound of the final integer max-flow f̂ is as
follows:
f̂ ≤
f̃ + (e − 1)√
f̃ lnm : f̃ ≥ lnm
e ln mln e ln m
f̃
: f̃ < lnm(6)
where m is the number of edges in G and e is the base of the
natural logarithm.
8.3 Application of the Shahrokhi-Matula algorithm
In [9], Carden et al. developed the first reported global router
with a theoretical bound from the
optimal solution, based on a multicommodity flow algorithm. They
applied Shahrokhi and Matula’s
two-terminal multicommodity fractional flow algorithm [77]
followed by randomized rounding to obtain
a multi-terminal multicommodity integer flow solution. Shahrokhi
and Matula’s algorithm is an ǫ-
optimal approximation algorithm. In contrast with Shragowitz and
Keel’s approach, their method is
directed towards a concurrent multicommodity flow formulation
instead of a min-cost multicommodity
flow formulation.
The integer linear programming formulation used here is the same
as formulation (1). Its linear pro-
gramming relaxation is obtained by omitting the integer
constraint in (1) and we denote this relaxation
as LP. The dual linear programming (DLP) of the LP is:
maximize∑
Ni∈N θi
subject to:∑
e∈E c(e)l(e) = 1
∑
e∈Ti,j l(e) ≥ θi, ∀Ni ∈ N ,∀Ti,j ∈ Ti
l(e) ≥ 0, ∀e ∈ E
(7)
The variable l(e) is the dual variable corresponding to each
edge e and is also referred to here as the
edge weight. The variable θi represents the throughput of the
flow from net Ni. According to the
theory of duality in linear programming, a feasible solution to
DLP provides a lower bound for the
optimal solution of LP, and the LP solution reaches its optimum
when it equals the DLP solution.
Based on this property, Shahrokhi and Matula design an
approximation algorithm in which the LP and
DLP solutions are pushed closer after each iteration, and the
final difference between the LP and DLP
33
-
solutions provides an upper bound on how far the LP solution
away from the optimal solution. An
ǫ-optimal algorithm implies that the resulting λ̂ is at most (1
+ ǫ) times the optimal solution λ̂∗, where
the value of ǫ is a specified parameter between (0, 1]. The
smaller the value of ǫ is, the more optimal
the solution is and the longer is the computation time.
Initially, the edge weight is defined as l(e) = 1/u(e)∀e ∈ E.
The algorithm begins by constructing
a minimum weight Steiner tree Ti for each net Ni to obtain a
solution satisfying the first constraint in
the formulation (1) without considering the bundle constraint.
As a consequence, the value of λ̂ may
initially be inordinately large. In subsequent steps, the
algorithm iteratively recomputes the Steiner
trees to decrease the value of λ̂ until the optimality condition
is satisfied. In order to avoid iterations on
trees with very small flows, a parameter σ0 is defined as the
smallest allowable fraction of flow changes.
If U =∑
e∈E u(e) and u∗ = min(u(e),∀e ∈ E), then σ0 is chosen to
beu2∗ǫ
16αU , where the constant α,
which is a user-tunable parameter, is typically between 0.01 and
100.
Next, the weights of the edges that whose flows were altered in
the last iteration are updated according
to l(e) = eαλ(e). Using this updated weight, new minimum weight
Steiner trees are recomputed for each
net. If θ =
∑
e∈El(e)u(e)
∑
∀Ni∈N
∑
∀e∈Til(e)
, then ǫ-optimality is satisfied if θ− 1λ̂θ
≤ ǫ, If ǫ-optimality is not satisfied,
then the net with the largest cost reduction from the old
Steiner tree to the new Steiner tree is rerouted
so that a portion of flow in the old Steiner tree is switched to
the new Steiner tree, and this cost
update and rerouting process is repeated until the ǫ-optimality
condition is satisfied. At this point,
the actual flow for each tree is scaled to x̄i,j = xi,j/λ̂.
Finally, the fractional solution is integerized
in to integer solution through randomized rounding, and any
remaining overflow is resolved through a
rip-up-and-reroute process.
8.4 Application of Garg-Könemann algorithm
The latest reported global routing procedure based on
multicommodity flow algorithm is due to Albrecht
[3]. This work is an application of Garg and Könemann’s
multicommodity flow approximation algorithm
[29], which is simpler and faster than Shahrokhi and Matula’s
algorithm [77]. Besides congestion, wire
length is also considered in this method.
Albrecht’s algorithm works on a routing graph G = (V, E) shown
in Figure 2(b), which represents
a two layer global routing problem in which one layer is
reserved for horizontal wires and the other
34
-
for vertical wires. The edges between two layers represent vias
and their capacities are the maximum
number of vias allowed in a grid cell. The algorithm permits
different wire widths, and uses the symbol
wi(e) to represent the wire width of edge e ∈ E belonging to net
Ni. The resulting integer linear
programming formulation is slightly different from that in (1).
Assuming that all of the demands
di = 1,∀Ni ∈ N , the formulation is:
minimize λ̂
subject to:∑
Ti,j∈Ti xi,j = 1, ∀Ni ∈ N
∑
i,j:e∈Ti,j wi(e)xi,j ≤ λ̂u(e), ∀e ∈ E
xi,j ∈ {0, 1}, ∀Ni ∈ N ,∀Ti,j ∈ Ti.
(8)
1. l(e) ← δ/u(e),∀e ∈ E2. xi,j ← 0,∀Ti,j ∈ Ti,∀Ni ∈ N3. ji ← 0,
i = 1, ..., k4. While (
∑
e∈E l(e)u(e) < 1)5. For i = 1 to k6. If ji == 0 or
∑
e∈T i,j wi(e)l(e) > (1 + γǫ)θi7. Find a minimal Steiner tree
Ti,ji ∈ Ti
for net Ni with edge weight wi(e)l(e), e ∈ E8. θi ←
∑
e∈Ti,jiwi(e)l(e)
9. xi,ji ← xi,ji + 110. l(e) ← (1 + ǫwi(e)/u(e))l(e),∀e ∈
Ti,ji
Figure 14: An approximation algorithm for fractional global
routing.
As before, the ILP problem is relaxed to the a linear
programming problem which is solved by the
approximation algorithm in Figure 14. The symbols δ, γ and ǫ are
constants, and k is the number of nets
to be routed. In the Shahrokhi-Matula algorithm, a fraction of
flow is switched from a higher weight
(more congested) tree to a lower weight (less congested) tree in
each iteration. In Garg-Könemann’s
algorithm, a flow of di is added to a low weight tree Ti,j ∈ Ti
in each iteration with the previously placed
flows remaining unchanged. Finally, the amount of flow on each
edge is scaled back by the number of
iterations. The following significant results are reproduced
from [3].
35
-
Theorem 8.1 Given any non-negative values l(e) for each edge e ∈
E, the expression:
∑ki=1 minT∈Ti
∑
e∈T wi(e)l(e)∑
e∈E l(e)u(e)
provides a lower bound on the optimum value of the fractional
global routing problem. Moreover, there
exist nonnegative values ye, e ∈ E, such that the expression
above is equal to the optimum value of the
fractional global routing problem.
Theorem 8.2 If there exists a solution for the fractional global
routing problem with maximum relative
congestion smaller than 1, the algorithm finds a ρ−approximation
in at most
1 +1
ǫ′λ̂∗ln1+ǫ′(
m
1 − ǫ′)
phases, if ρ = 1/(1− ǫ′)3 and ǫ′ = ǫ(1 + γǫ). Moreover, the
variables ye, e ∈ E, converge to the solution
of the dual linear program.
9 Hierarchical methods
The first prominent hierarchical method for routing was proposed
by Burstein and Pelavin in [8].
This method recursively divides the routing regions into
successively smaller sub-regions, and nets at
each hierarchical level are routed simultaneously and refined in
the subsequent levels. The sub-regions
are referred to as super cells, compared to the global routing
cells (GRC) defined in the global routing
formulation. This is a systematic divide-and-conquer approach
and therefore transforms the large and
complicated global routing problem into a series smaller and
simpler sub-problems. As a result, this
method is inherently faster than flat routing methods. In fact,
this approach is quite versatile and can
be applied to detailed routing as well. Moreover, it reduces the
problem of net-ordering in sequential
routing since higher level decisions are used to guide the
solution at lower levels of the hierarchy. While
this approach does not entirely remove the net ordering issue,
this is an issue of diminished importance
in comparison with flat approaches. The simplicity of this
method carries with it limitations on the
quality of the routing solution, since a routing decision at one
hierarchical level neglects the requirements
at subsequent level and may make a choice that is suboptimal for
subsequent levels. Thus, a hierarchical
method is often combined with other global routing techniques,
such as rip-up-and-reroute.
36
-
Hierarchical methods form a rich family of global routing
approaches and numerous works [8, 14,
32, 33, 41, 51, 53, 59, 62–64, 69, 70, 89] have been reported.
These methods can proceed in a top-down,
bottom-up or hybrid manner and have been applied to gate
array/sea of gates, standard cell and custom
design. Typical partitioning methods may proceed by bisection or
quadrisection, and may be either
uniform or non-uniform. In this section, we will describe some
major representative works in this family
of methods.
9.1 Top down successive refinement
The original method proposed by Burstein and Pelavin in 1983 was
applicable to gate arrays, switchbox
routing and channel routing. The method is based on the
assumption of uniformity of the wiring
substrate, a restriction removed by subsequent works. In
addition to minimizing wire congestion, this
method tries to minimize via congestion and wire length in terms
of the number of grid cells traversed
by the wires.
(a) (b)
(d)(c)
Figure 15: An example of routing by top-down hierarchical
refinement.
As shown in Figure 15, the routing region is recursively
bisected into smaller super cells, and at each
level, the routing is performed in terms of the super cells at
that level. In the example of Figure 15, the
routing at each level is represented by the shaded super cells
for a 3-pin net. This process is performed
37
-
in a top-down manner until the super cells reduce to the actual
grid cells for global routing.
The initial routing is trivial and the critical part of this
algorithm is related to refining the routing
solution from one hierarchical level (a 1×N super cell) to a
lower level (a 2×N (super) cell) after each
bisection. For the example in Figure 15, a routing solution for
the set of 1 × 4 cells that lie inside the
thickened box in (c) is refined to a routing solution for the 2
× 4 cells inside the thickened box in (d)
in the next step. Thus, the critical problem is to determine
routes for multiple nets in a 2 × N cell to
minimize congestion and wire length. Burstein and Pelavin
proposed two heuristics to solve the 2 × N
routing problem: (1) divide-and-conquer, and (2) dynamic
programming.
(a) (b)
(c) (d)
(f)(e)
Figure 16: An example of divide and conquer in 2 × N
routing.
The divide-and-conquer heuristic is illustrated in the example
in Figure 16. The 2 × N (N = 8)
routing problem in Figure 16(a) is first reduced to a 2 × 2
routing problem and solved as in Figure
16(b). Next, the cells are partitioned in halves and two pseudo
pins (black dots in Figure 16(c)) are
introduced at the two neighboring cells across the cutline and
on the routing path of solution in (b).
Now the problem is reduced to routing a 2 × N1(N1 = 4) and a 2 ×
N2(N2 = 4) problems, where
N1 +N2 = N . The two new sub-problems can be recursively solved
as a series of 2×2 routing problems
as shown in Figure 16(d) – (f).
38
-
Figure 17: An enumeration of all patterns for 2 × 2 routing.
Through this divide-and-conquer process, the 2 × N problem is
reduced to a series of 2 × 2 routing
problems, each of which is relatively simple since all of the
possible routing patterns can be enumerated
easily as shown in Figure 17. Therefore, the problem of routing
each net in a 2× 2 grid is equivalent to
choose a routing pattern for each net among the patterns in
Figure 17. Burstein and Pelavin formulate
this problem as integer programming problem to minimize overflow
and maximize wiring and via slacks;
the wiring slack is defined as the available wiring tracks on a
grid boundary minus the number of wires
across this boundary, while the via slack is the number of via
spaces in a grid cell minus the number of
bends in this grid cell. The integer programming is first
relaxed and solved as a linear program, after
which the integer solution is obtained by rounding the
fractional solutions.
39
-
T1
T2
T3
T4
Figure 18: Examples for different tree configurations
representing optimal subsolutions for a dynamicprogramming based
solution to the problem of 2 × N routing.
The second approach that was proposed is based on dynamic
programming. For a set of 2×N cells,
the procedure starts with the leftmost column k, with a terminal
cell containing a pin, and grows a tree
towards the right by incrementing k by one column at a time
until the N th column is reached. At each
step, there are a set of optimal subsolutions of partial trees
that are maintained for the 2 × k cells to
the left. These trees can be enumerated as:
• T 1(k): a minimum cost tree connecting all of the terminal
cells in the left k columns to cell g(1, k).
• T 2(k): a minimum cost tree connecting all of the terminal
cells in the left k columns to cell g(2, k).
• T 3(k): a minimum cost tree connecting all of the terminal
cells in the left k columns, to both
g(1, k) and g(2, k).
• T 4(k): two disjoint minimum cost trees T ∗ and T ∗∗, g(1, k)
∈ T ∗ and g(2, k) ∈ T ∗∗. Each terminal
cell is in either T ∗ or T ∗∗.
An example of a set of such trees is shown in Figure 18. When
the trees grow from column k to k+1,
a new set of trees T i(k +1), 1 ≤ i ≤ 4 are obtained from T
i(k), 1 ≤ i ≤ 4, and the minimum cost tree of
40
-
each type is stored for each value of k. The dynamic programming
property arises from the fact that the
optimal subsolution for a value of k can be created from the
optimal subsolution trees for column k−1.
The above 2 × N grid routing procedure is performed for each net
sequentially with the wiring cost
dynamically updated according to the changes on congestions.
After all of the nets have been routed,
each net is ripped up and rerouted by repeating the same
procedure, but using the complete congestion
information. The computational complexity for the presented
algorithms is O(k(p + q) log(pq)) for k
nets to be routed on a p × q grid.
9.