Embed Size (px)
Citation preview

1
A Superconducting Helical Undulator-Based FEL Prototype Cryomodule
E. Gluskin – PI, APS/ANL P. Emma – Co-PI, SLAC, Y. Ivanyushenkov – Co-PI, APS/ANL
Sep. 19, 2016
1. Introduction and Motivation
Undulators serve as the primary source of radiation for modern storage rings, and more recently for the advent of Free-Electron Lasers (FELs). The performance of future FELs can be greatly enhanced using the much higher magnetic fields of superconducting undulators (SCU) [1]. For example, the upper limit of the spectral tuning range of the LCLS-II hard x-ray (HXR) FEL can be extended from just under 5 keV using a hybrid-permanent magnet undulator (PMU), to over 8 keV using a helical SCU of similar length and gap (see Figure 2). In addition, SCUs have no permanent magnet material and are therefore expected to be orders of magnitude less sensitive to demagnetization through radiation dose; a major issue at LCLS-II with its nearly 1-MW electron beam power.
A previous R&D effort [2] was executed in 2013-2015 in order to develop and compare two competing planar SCU magnet technologies by building, testing, tuning, and measuring two 1.5-m long planar SCU prototype magnets using two different superconducting wire technologies: NbTi at ANL, and Nb3Sn at LBNL. Although the Nb3Sn magnet did not reach its full excitation current (< 75%), the NbTi magnet demonstrated all technical specifications, including an rms phase-shake of < 5 degrees, x and y first field-integrals of < 40 µT-m, and x and y second field-integrals of < 150 µT-m2, etc.
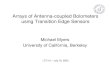
This program clearly demonstrated the NbTi SCU magnet technology, but did not address many other technical issues associated with using SCUs in a long FEL undulator, such as magnet alignment and support within a cold cryomodule, integrated electron beam focusing, beam position monitor (BPM) diagnostics, cryogenic cooling capacity, etc. Therefore, we propose an additional phase of R&D that is needed in order to make the SCU solution a viable option for future FEL design and construction. By September of 2019, this new 3-yr R&D proposal aims to demonstrate the practicality of superconducting undulators for FELs by designing, building, and testing a prototype SCU-Cryomodule which includes two 1.5-m long NbTi SCU magnets (likely helical), a cold phase-shifter, a cold BPM, a cold quadrupole focusing magnet, and a scalable cryogenic cooling system. A sketch of the SCU-Cryomodule (SCU-CM) is shown in Figure 1.
Figure 1: Prototype SCU-CM with two 1.5-m long magnets, a cold quad, phase shifter, and BPM.

2
This prototype includes only two SCU magnets, one phase shifter, and one cold quadrupole in order to keep costs down while still addressing the main technical issues. The production SCU-CM will more likely hold 3 magnets, 3 phase shifters, and two quadrupoles (one at the upstream end for focusing and one at the downstream end for beam-based alignment). The smaller prototype is not designed for use in an FEL, but is rather designed to demonstrate and address each main technical challenge as listed below.
2. R&D Goals
The following 10 technical goals need to be addressed with the SCU-Cryomodule prototype such that, when this R&D program is finished, and assuming each of these points has been addressed adequately, the SCU will then have been demonstrated as a reasonably low-risk technology for any future FEL.
1. Component-to-Component Alignment: Transverse relative alignment (< 50 µm) of the 2 SCU undulator magnets, focusing quadrupole, and BPM all with respect to one another and achieved at cold temperatures (~ 4K).
2. Component-to-Fiducial Alignment: Transverse alignment (< 100 µm) of the cold internal
assembly with respect to external fiducials.
3. Field Integrals: Control of 1st and 2nd field integrals in x and y as measured over the full internal assembly (including quadrupole and phase-shifter magnets) to within specified tolerances (e.g., < 40 µT-m), including stray fields.
4. Phase Shake: Measurement and control of rms phase “shake” over the full internal assembly to
within specified tolerances (e.g., < 5° rms).
5. Phase-Shifter: Design, fabrication, and demonstration of an appropriate, tunable, cold, magnetic phase shifter with tolerable 1st and 2nd field integrals in x and y.
6. Cold-Quadrupoles: Design, fabrication, and demonstration of an appropriate, cold quadrupole
magnet. The quadrupole should also include x and y beam steering coils (e.g., ±500 G-cm each).
7. Cryo-System: Initially a cryo-cooler system, but with engineering design considerations to allow future evolution of the CM design to a conceptual 4K refrigerator system.
8. BPM: Design, fabrication, and demonstration (in bench tests) of a linear, high-resolution (< 1
µm rms) cavity BPM with transverse alignment as listed in item 1 above.
9. Beam Vacuum Chamber: Design, fabrication, and demonstration of a cold, smooth (< 0.2 µm rms), 5-mm ID beam chamber, with high electrical conductivity on the beam side (e.g., Al or Cu). Beam heating is expected only at the level of 1 W/m (LCLS-II at 120 kW avg. beam power).
10. Thermal-Cycle Stability: The internal component alignment, field integrals, and phase shake
must be repeatable to specified tolerances over cool-down and warm-up cycles.

3
3. Parameters
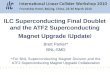
We base the prototype SCU design on the Hard X-Ray (HXR) FEL at LCLS-II, which is driven by a new superconducting linac (4 GeV) at up to 1 MHz. The FEL photon energy tuning range at 4 GeV is 1.3 keV to 5.0 keV. The FEL x-ray pulse energy as a function of the single (tunable) photon energy is shown in Figure 2 for various undulator types, all with the same lower-limit tuning range of 1.3 keV at 4 GeV (which sets the period in each case). The solid-blue curve is the LCLS-II baseline design using a planar permanent magnet undulator (PMU) with 26-mm period and 7-mm full magnetic gap. Also shown for comparison are the performance curves for a planar NbTi SCU with 7-mm gap (solid-green), a helical NbTi SCU with 9-mm winding diameter (dotted-red), and a helical NbTi SCU with 6-mm winding diameter (dashed-magenta). In all cases the vacuum chamber ID (or minimum internal dimension for planar) is 5 mm. The emittance for these curves is 0.5 µm, the peak current is 1 kA, the energy spread is 0.5 MeV, and the undulator’s magnetic length in all cases is 115 m (140-m beamline length with 0.82 packing factor). The various undulator parameters are listed in Table 1.
Figure 2: FEL X-ray pulse energy as a function of the (tunable) single-photon energy, with each curve as a different undulator type and with the same lower-limit tuning range of 1.3 keV at 4 GeV. The solid-blue curve is a PMU with 7-mm full magnetic gap and 26-mm period. The solid-green curve is a NbTi planar SCU with 7-mm magnetic gap and 19.4-mm period, the dotted-red curve is a NbTi helical SCU with 9-mm winding diameter and 15.5-mm period, and the dashed-magenta curve is a NbTi SCU with 6-mm winding diameter (wound directly on vacuum chamber) and 18.2-mm period.
The 6-mm helical winding diameter is the most aggressive approach with the conductors wound directly on the thin vacuum chamber (0.5-mm wall thickness), and no iron. The 9-mm helical winding diameter (including iron) is a lower performance compromise which might be a fallback option if the 6-mm case is

4
not feasible. Both options will be explored within this R&D program, especially targeting the 6-mm winding diameter.
The parameters of the other SCU-CM components are listed in Table 2, including the quadrupole magnet strength, BPM position resolution, and the phase-shifter tunability range.
Table 1: Parameters of the various undulator types in Figure 2.
Parameter symbol PMU P-1 H-1 H-2 unit Undulator technology (NbTi for SCU) - PMU SCU SCU SCU - Undulator winding geometry - planar planar helical helical - Full magnetic gap (or winding diam. for helical) gm 7 7 9 6 mm Vacuum chamber ID (or min. internal dimension) gvc 5 5 5 5 mm Undulator period (for 1.3-keV lower tuning limit) λu 26 19.4 18.2 15.5 mm Max. K value (80% short-sample limit) Kmax 2.58 3.09 3.23 3.54 - Max. on-axis peak magnetic field (80% s-s limit) Bmax 1.06 1.71 1.91 2.44 T
Table 2: Parameters of the other SCU-CM components (at 4 GeV).
Parameter symbol value unit Max. quadrupole magnet length-integrated gradient GL ±2 T Magnetic length of quadrupole magnet (approx.) L 50 mm Pole-tip radius of quadrupole magnet r 5 mm Max. pole-tip field of quadrupole magnet BQ ±0.2 T Max. integrated field of x and y correctors within quad BL ±500 G-cm Phase shifter range (phase integral) - 80-500 T2mm3 BPM x and y beam position resolution (rms) σx,y < 1 µm
4. Cryogenic System
The cryogenic system is designed to support the R&D goals described in the previous section(s). The general system concept is an extension of existing APS SCU technology and includes the following main subsystems:
• Insulating vacuum vessel and associated vacuum system • Cold mass support system (capable of addressing the component-to-component alignment
R&D goal) • Cold mass assembly (including undulator magnets and associated beamline components) • Refrigeration system (initially cryocooler-based but amenable to straightforward modification
to a cryoplant-compatible system) • Thermal radiation shield
Figure 3 shows an overview of the concept. The vacuum vessel is based on the HSCU cryostat currently under construction for the APS and takes a modular form, making use of standard vacuum hardware (flanges, etc.) where possible. This keeps costs and lead time low and results in a versatile design easily re-configured as necessary. The central full-diameter 6-way cube cross, together with the end flanges,

5
provides access to either end of both magnets and adjacent components. Demountable cryocooler turrets are located on the 6-way cross and include all current leads.
Figure 3: FEL SCU R&D cryostat. The cryostat vacuum vessel OD is 20” (standard ISO NW500 size).
Figure 4: Cold mass consisting of undulator magnets (gray blocks), vacuum chamber, LHe reservoir system, and cryocooler turrets. The focusing quadrupole is shown at right, in red, and the lower turret thermal shield is suppressed here to make the inter-magnet area (4”) visible.
Alignment capability will be provided both within the cold mass assembly and also between the cold mass assembly and the vacuum vessel. The cold mass support system will consist of several low-heat-leak support rods, which extend outside the vacuum vessel using hermetic bellow assemblies. This permits adjustment of the cold mass position within the cryostat during operation. Individual components will be aligned relative to a common strongback during assembly. Component positions are measured during

6
operations via laser displacement sensors mounted on vacuum vessel viewports – a technique that is being implemented in the APS HSCU. Beam-based alignment using feedback from alignment quads will be implemented by motorizing the support system adjusters external to the vacuum vessel. The cryostat will support additional alignment techniques, if necessary. Cold adjusters between the strongback and individual components are an example of an enhanced alignment scheme which could be evaluated. Figure 4 shows the cold mass concept.
A system of four Sumitomo 4K two-stage cryocoolers, similar to the APS HSCU, is envisioned, although the packaging is different. Magnet cooling is achieved via conduction to liquid helium (LHe) filled cooling channels running the length of the undulator magnet. Ancillary components will be conduction cooled. Heat is extracted by re-condensation of helium vapor in the LHe reservoir system. An alternative cooling method using flowing LHe (such as would be implemented for a string of cryostats fed from a cryoplant/distribution system) is easily implemented by removing the cryocooler turrets and substituting a current lead/bayonet connection turret. A cryoplant (or batch fill system using a storage dewar) would supply LHe to the inlet bayonet to replenish LHe boil-off. Helium boil-off gas would return via the exhaust bayonet either to the cryoplant low pressure return or (for batch mode) to a helium reclamation/vent line.
The thermal radiation shield will be conduction cooled using either the 1st-stage capacity of the cryocoolers or (for cryoplant or batch-fill mode) a liquid nitrogen trace tube. Shield design is modular to permit assembly access.
5. Undulator Magnet
A helical superconducting magnet consists of a double-helical conductor winding with the currents flowing in the opposite directions, as shown in Figure 5 [3]. The on-axis helical magnetic field value depends mainly on the undulator period length and the conductor winding radius, as well as winding current density. The beam chamber bore diameter therefore becomes a critical parameter for the helical undulator. A 3d magnetic model has been developed in Opera and Radia software packages to be used for the field calculation and optimization of the magnetic design of the undulator once the beam chamber bore is defined. A “scaling law” analytical equation is also being developed in order to calculate the undulator peak field as a function of several parameters, such as the magnet-winding diameter, undulator period and winding current density [4].
Figure 5: Helical SCU magnetic structure.
A concept of continuous winding of a helical undulator (shown in the top left picture of Figure 6) has already been developed at the APS. Recently, a compact coil winding concept was developed and tested.

7
The first prototype to be wound is shown in the bottom picture of Figure 6 and the latest model of the design is shown in the top right picture of Figure 6. The main feature of the new design is a more compact distribution of the conductor at the ends of the undulator where the conductor transitions from one helix to the other. The design also reduces the number of conductors in each helical coil pack over an arbitrary number of periods at the end which allows the magnetic field at each end of the device to be gradually reduced.
Figure 6: Continuous winding of a helical SCU. Top left is the original design. Top right is the newly developed design. Bottom is the first prototype magnet with the recently developed winding scheme.
After winding the helical SCU, the conductor is secured in place on the core through epoxy impregnation. Under the compact winding scheme, the outer diameter of the wound magnet is the same along the entire length of the device. This simplifies the design and construction of the mold used for epoxy impregnation and also allows for tighter machining tolerances of the mold. The reason for requiring tighter machining tolerances on the mold is to allow the mold and core to remain together after epoxy impregnation and use the mold as a strong-back, as shown in Figure 7. The mold is then used to support the magnet assembly inside the cryostat.
Figure 7: Helical magnet assembly with strong-back.

8
6. Quadrupoles, Phase Shifters, and BPMs
The superconducting phase shifter (SCPS) has to meet or exceed the requirements applied to the HXR LCLS-II phase shifter (PS). Specifically, the range of the first field integral adjustment should be no less than 80 T2mm3 to 500 T2mm3 from minimum to maximum. It also should not take more space than the HXR PS. The SCPS will have two full strength poles of different polarities and two end sections that allow for the magnetic field in the vicinity of the device to be brought to zero. A quick analysis of the magnetic field produced by the SCPS with the magnetic gap of 9 mm and total magnetic length of 50 mm shows that such a device would generate more than 1 T field on the beam axis and will easily exceed the requirement for the first field integral specified above. Two end sections of the SCPS will incorporate field integral correction coils. Their purpose is to maintain the first and second field integrals within specified tolerances, similar to the LCLS-II.
The schematic drawing of the SCPS magnet cross-section is shown in Figure 8. It should be noted that calculations and measurements of the LCLS-II HXR PS magnetic field profile show that the PS ambient field is close to zero at 30 mm distance from the edge of the device. For the SCPS, this value should be even less due to its smaller magnetic gap. The total space of 120 mm along the beam direction allocated for the SCPS should be quite adequate and keeps the undulator magnets closely packed. Similar to the LCLS-II HXR PS, positioning tolerances for the SCPS in all directions are easily achievable. Once in place the SCPS will be calibrated while “cold” and will not be moved after that.
Figure 8: SC phase shifter schematic. The red and blue colors correspond to different directions of the current in the main coils, whereas the pink color represents the end correction coils.
The superconducting quadrupole (SCQ) will have to meet specifications very similar to the room temperature quadrupoles of the LCLS-I and LCLS-II. These room temperature quads have been mass-produced and demonstrated exemplary performance. The design and fabrication of SCQ will utilize LCLS-I and LCLS-II experience of designing and building quads. A preliminary magnetic analysis of SCQ shows that SCQ will have significant safety margin in the design and operation of all its components. The design and construction of the SCQ would be therefore a straightforward task, and the parameters presented in Table 2 will be easily met. There is no special R&D needed for this task. Special attention though should be given to the alignment of the SCQ with respect to the SCU magnet and its precise, repeatable motion during the beam-based alignment procedure, but this is a different subject covered in the “Alignment” section of the proposal.

9
The design for the Cold Cavity BPM (CCBPM) system leverages the experience gained from Argonne’s collaboration on the LCLS project. The general system specifications of CCBPM are described below and in Table 3.
Table 3: Cold Cavity BPM (CCBPM) system specifications.
Parameter Specification Condition
Resolution < 1µm rms 0.1 nC ±1 mm range
Offset Stability < ± 1 µm 10 hours ±1 mm range
Offset Stability < ± 3 µm 30 days ±1 mm range
Gain error < 10 % ±1 mm range
The design approach will be based on an X-band cavity BPM. In the pill, a box-like cavity, the TM110 dipole and TM010 monopole modes are excited by the beam passing. The amplitude of the TM110 produces a signal that is directly proportional to the beam displacement. The TM011 signal is proportional to the beam intensity or charge. Both of these signals are required in order to extract a normalized position for both horizontal and vertical planes.
The cavity BPM is shown in Figure 9. The beam passes through the monopole reference cavity, shown on the left. The beam excites the TM010 monopole mode signal at 11.384 GHz, which is proportional to the beam intensity or charge. The second cavity, 36 mm downstream through the 10-mm-diameter beam pipe, is the TM110 dipole cavity shown at the far right. The iris couplers are precisely machined into the solid copper block to ensured repeatable and accurate coupling. The design shown in Figure 9 would be modified to move the windows from the waveguide outputs to the iris coupler outputs.
Figure 9: X-band cavity BPM cross section.

10
The approach we are considering at this time is to use the X-band cavity BPM shown in Figure 9 as the baseline design. The mechanical and electrical parameters will have to be evaluated once the specifications are finalized. The size of the X-band cavity should be solid OFC suitable for cryomodule environment. The following list of R&D activities will be required.
1. Evaluate the frequency shift going from room temperature to cold temperature. 2. Design and test new window. 3. Design new waveguide to coax transition. 4. Study the minimum number of outputs required out of the cryomodule. 5. Test prototypes, including vacuum test and temperature cycles. 6. Develop cleaning process that meets cryomodule requirements.
Figure 10: LCLS X-band cavity BPM.
7. Alignment Strategy
The superconducting undulator has undoubtedly the disadvantage of limited access to the magnetic array after cool-down. Therefore, the system alignment strategy is even more important for the SCU. The strategy includes a precise relative alignment of sub-components inside the cryostat supplemented by a beam-based alignment procedure.
The cold mass components, including two undulator magnets, a phase shifter, a BPM, and a focusing quad are mounted on a single strong-back which is machined to high precision. These components are precisely aligned in warm conditions. The expected shrinkage of the components during cool down can be calculated, since their geometry and materials are known. The actual position of the components in a cold state will be optically measured through dedicated windows in the cryostat. The actual and design positions will then be compared, and a correction (by shimming) in the component positions will be done during the following warm up. In the second cool down, the actual position will be checked again to confirm that the required level of accuracy is achieved. At the end of this step, all the sub-components are pre-aligned.
The quadrupole magnet will be energized in a special test cryostat and its magnetic axis will be measured with respect to fiducial points on the quadrupole body. In such a way, the location of the quadrupole magnetic axis can be optically measured through the cryostat optical windows when the cold mass is cold. The positions of the other cold mass components, relative to the quadrupole, will also be known as described above. This includes the relative alignment of the two undulator magnets.

11
Finally, for an FEL composed of production-level cryomodules, a high-precision beam-based alignment (BBA) procedure [5] will be used during beam operations (not possible with the prototype), which uses beam position readings from the BPMs, and takes advantage of the quadrupole field gradients in order to center the undulator segments and quadrupoles onto the electron beam trajectory. This procedure has been applied routinely at LCLS-I since 2009. The method finds the magnetic centers of the focusing quadrupoles with respect to the beam by varying the electron beam energy by large factors (3-4) and measuring the induced beam kicks generated by a series of off-axis quadrupoles, using all BPM position readings. The cryostat will be set on camshaft movers, similar to conventional undulator girders, and they will be used to apply an alignment correction. This should work well for the quadrupole magnets but it leaves the undulator magnets potentially misaligned. However, if the focusing quadrupole is also precisely and permanently aligned transversely to the magnetic center of its adjacent undulator segment (to < 50 µm rms, as at LCLS-I), then both the focusing quadrupole and its adjacent undulator segment will be aligned when the local magnet movers are adjusted. If a second quadrupole magnet, an “alignment quad”, is added (not included in the prototype module), and is also well aligned to the upstream end of the adjacent undulator segment, then a final step in the BBA procedure will be to turn on and off the alignment quadrupole, record the induced kick in each plane, and correct its x and y position, which is pinned to the upstream end of its adjacent undulator segment. Note that the special alignment quadrupoles are only switched on during beam-based alignment, and are switched off during FEL operations. Only the focusing quadrupole magnets at the end of each cryostat are switched on during FEL operations (i.e., used for electron focusing).
Each of two motion control platforms will allow ±1 mm independent x and y position adjustment at each end of the cryostat, providing control with at least four degrees of freedom (x, y, pitch, and yaw) of the two joined undulator segments and their adjacent quadrupole as one rigid structure. The two undulator segments within the cryostat must be well aligned to a straight line (to ~50 µm rms in both x and y for helical undulators). In this way, when the position adjustments are used to center the quad onto the electron beam, the set of undulator segments within one cryostat will then be aligned all along its length. The BBA procedure is global and therefore also aligns the full multi-cryostat undulator system to a straight line. In addition, all BPM readings are re-calibrated (in terms of a readback offset) so they all read zero in both x and y after BBA is complete, as routinely done at LCLS-I.
Note that the full BBA procedure cannot be applied for this SCU cryomodule proto-type, since it will not be tested with an electron beam, but the various systems needed to execute BBA will all be tested, including the motion control platforms. In any case, BBA is already well tested at LCLS-I for 7 years now, and does not need further demonstration.
8. Magnetic Measurements
Vertical Cold Test System The existing Vertical Cold Test System (VCTS) at ANL is used to perform coil training and Hall probe
magnetic measurements of SC magnets in a LHe bath. Two vertical cryostats are presently being utilized. The smaller cryostat has a 200-mm ID and is 1.9 m in depth. The larger cryostat has a 318-mm ID and is 4 m in depth. The smaller cryostat can be used for testing magnets up to 1 m in length, whereas the larger cryostat can accommodate magnets up to 2 m in length.

12
By performing SC coil training and magnetic measurements of the magnet cores in LHe bath the performance can be confirmed prior to assembly into the final horizontal cryomodule. It has been found with the planar SCU’s that the required number of training quenches (to achieve the critical current) after one thermal cycle is roughly 10% of the initial number of quenches. The vertical LHe bath testing is thus a crucial step in the process of producing a high performance SCU.
Vertical Magnetic Measurement System The magnetic measurements performed on SCUs in the vertical cryostats are primarily Hall probe
based. The smaller cryostat has a linear stage capable of 1.5 m travel for driving a carbon-fiber Hall probe assembly through the mid-plane of the SCU under test. The larger cryostat is capable of 2.1 m of Hall probe travel.
Horizontal Cold Test System The existing Horizontal Cold Test System (HCTS) is used to test all aspects of an SCU cryomodule
prior to installation into the APS storage ring. The HCTS consists of vacuum equipment, cryocoolers, system control and monitoring, and the magnetic measurement system. Presently the system can accommodate up to 4 cryocoolers, 40 thermal sensors, two LHe sensors, 8 heaters, 16 voltage taps, and all the required vacuum monitoring and control. The system is scalable for future development as the needs arise.
Horizontal Magnetic Measurement System The horizontal magnetic measurement system will be an extended version of existing system shown in
Figure 11, which was successfully used for the measurements of the APS undulators SCU0 and SCU1 [6]. It implements a ‘warm tube’ concept in which a titanium guiding tube is located in the cold beam chamber of the cryostat. The guiding is thermally isolated from the beam chamber and is self-heated by passing an electrical current through it. The guiding tube bore is open to air and accommodates a carbon fiber stick with Hall probes or wire measurement coils. In this design, the temperature of the Hall sensors is kept close to room temperature. The wire coils are of rectangular or ‘figure-8’ types to measure the first and the second field integrals.
Figure 11: SCU horizontal magnetic measurement system with 3-m linear stage for Hall probe scans. SCU0 cryomodule (on left).

13
The scanning Hall probe system can perform on-the-fly field measurements at 2 cm/s, with 0.2 mm between measurements and longitudinal range of 3 m. The Hall probe data is used to determine local field errors and phase errors. Hall probe assemblies using up to three Hall sensors (attached to carbon-fiber tubing and driven by a linear stage) are used to measure the vertical and horizontal fields along the length of the SCU. For cryostats longer than 3 m, an additional linear stage will be used such that scanning Hall probe measurements could be performed on each half of a 5-m cryostat with two independent 3-m linear stages.
Stretched Wire, Rotating or Fixed Coil A stretched wire loop, which can be configured as rectangular, delta, or ‘figure-8’, is used to determine
the static and dynamic (such as during a quench) 1st and 2nd field integrals. For static fields the coil loop is rotated and a Lock-in-amplifier is used to measure the integrated fields. For dynamic measurements, the loop is oriented to measure the vertical or horizontal fields, typically during a forced quench. Depending on the particular beam chamber geometry, the wire loop can be translated along the transverse axis approximately ±1 cm to measure the integrated multipole components.
9. Schedule
The duration of the project is about 11 quarters (690 working days) as shown in the chart below.

14
10. Cost Estimate
The estimated cost of the project is 5.5 $M, including 1.4 $M of ANL overhead, as listed in Table 4.
Table 4: Cost estimate for the project. Project Grand Total with ANL Overhead ($M) 5.500 ANL Overhead ($M) 1.419 Project Total without ANL Overhead ($M) 4.081 M&S ($M) Effort ($M) 2.335 1.746 Project Tasks: M&S ($K) Effort ($K) Design 0 500 Procurement 1035 148 Fabrication and Component Assembly 1110 576 FEL SCU Module Assembly 20 243 Instrumentation and Control System Development 90 112 Measurement System 60 88 FEL SCU Module Cold Test 20 79
11. Summary
This proposal is intended to develop superconducting undulator technology for use in future FELs by demonstrating the main engineering challenges in a small, low-cost SCU cryomodule, which will eventually develop into an FEL building block. This prototype module will not be constructed for use in an actual electron accelerator, but it will include all of the main technical issues that need to be demonstrated (see 10-item list of goals in section 2) in order to reduce the risk of this technology and make it viable for any future FEL where SCU technology can be beneficial. The project is expected to require 3 years of effort and is to be carried out at the Argonne National Laboratory where extensive SCU knowledge, facilities, and experience are already available. This project is the next logical step to follow the SCU-magnet R&D that was successfully carried out in 2013-2015.
12. References
[1] J. Bahrdt, Y. Ivanyushenkov, “Short Period Undulators for Storage Rings and Free Electron Lasers”, Journal of Physics, Conf. Series, 425 (2013), 032001.
[2] P. Emma et al., “A Plan for the Development of Superconducting Undulator Prototypes for the LCLS-II and Future FELs,”in Proc. of 36th Int. Free-Electron Laser Conf., Basel, 2014, THA03.
[3] S.H. Kim and C. Doose, “Development of a model superconducting helical undulator for the ILC positron source”, in Proceedings of PAC07, Albuquerque, New Mexico, 2007, TUPJE068.
[4] S.H. Kim, “A scaling law for the magnetic fields of superconducting undulators”, Nucl. Instrum. Methods A, 546 (2005), 604-619.
[5] P. Emma et al., NIM A 429:407-413, 1999.
[6] C. Doose, M. Kasa, “Magnetic Measurements of the First Superconducting Undulator at the Advanced Photon Source”, in Proc. of 2013 Part. Acc. Conf., Pasadena, CA, pp. 1238-1240, THPBA06.