Embed Size (px)
Citation preview

--4
A STABILITY ANALYSIS OF THE ROLL MOTION
OF A SHIP IN AN IRREGULAR SEAWAY
by
WiG. PRICE').
The restoring moment coefficient in the differential equation describing the roll motion of a ship
is assumed time dependent - being either sinusoidal or random in form. For a sinusoidal coefficientthe motion equation reduces to the Mathieu type and the stability of motion discussed. For a ship inan irregular seaway, the coefficient will be a random time dependent function. The concepts of sta-bility from a probabilistic viewpoint are defined and a method summarised how the stability of mo-tion in this situation may be investigated.
1. IntroductionAlthough the motion and stability of .a ship in
the horizontal plane in calm water have been ex-tensively studied and documented (e. g. seeMandel (1967)) the stability of a ship in a seawayhas received less attention. This latter problemhas been investigated by Davidson (19-18). Suther -land and Korvin-Kroukovsky (1948), Weinblumand St. Denis (1950), Weinblurn (1951). Rydill(1959), Lewis and Numata (1960), and Tasai(1968).
In a deterministic analysis, the seaway is usu-ally describedby a sinusoidal wave of known am-plitude, frequency and direction of travel suchthat the resultant ship motion may be written ina deterministic form. The mathematical modelof the ship-wave system usually involves lineardifferential equations with constant coefficients.
However, Grim (1932), when investigating thestability of the roll motion of a ship in sinusoidalhead waves deemed it necessary to include aperiodic restoring moment coefficient in themathematical model. s regular sinusoidal wavesof frequency w pass along the ship there occursa variation in the metacentric height which isgreater or less than the static value vhen thewave trough and wave crest are respectively a--midships. Vossers (1962) described the rollingmode by the differential equation.
(t) + 2k (,), ci)(t) +2(1 +3 cos wt)
=K costwhere i)(t)=dc (t)/dt etc.. k is the damping fac-
) Department of Mechanical Engineering, University College London.
tor. wo is the natural frequency of roll motion,Kocip is the wave rolling moment amplitude and 3is the amplitude of the variation of the meta-centric height.
Time dependent coefficients have also been in-corporated into the mathematical models of Grim(1962), Wahab and Swaan (1964), Boese (1969)and Price (1972) when investigating the stabilityand control of a ship in following waves. Such co-efficients result from the interaction between theship-sinusoidal wave disturbance and max' havecomplicated forms involving the characteristicsof the sinusoidal wave and ship parameters.
Unfortunately, in nature, regular sinusoidalwaves rarely, if ever, exist. In general, for arandom seaway, the resultant wave force or mo-ment and the time dependent coefficients are alsorandom in form. In such a situation, the equa-tion of roll motion may be assumed expressableas,
103
Ci)(t) + 2kw0 cb(t) + T.(t`, +c(t) c.^:(t) =K(t)0
where, analogous to the previous deterministicequation, the coefficient w20;-_, cosczt and wave mo -mentK coswt are replaced.by the random pro-cesses a(t) and K(t) respectively.
The two random processes ca(t) and K(t) are pro -duced by the same irregular seaway and are there-fore probably inter -related. It is assumed that a(t)and K(t) are both stationary random processesthough this assumption is invalid for the roll re-sponse random process 7.,,(t.) when the ter m a(t) ap(t)exists in the differential equation.
Due to the complexity of the random process
Delft University of TechnologyShip Hydromecimnics Laboratori
LibraryMekelweg 2- 2628 CD Delft
The NetherlandsPhone: 31 15 786373 - Fax: 31 15 781836
-
-

104
coefficients, ageneral solution of the differentialequation describing the roll motion is most un-likely. However, in this investigation. ways ofdefining the 'stochastic stability of the motion ofthe ship are discussed and the resulting stabilitycriteria determined. In order to simply illustratethe concepts and method used, the roll model isinitially assumed described by a linear differ-ential equation with constant coefficients (a(t) = 0)and the conditions for the stability of motion of aship in a sinusoidal and random seaway are de-termined.
2. Concepts of stabilitySince the coefficients of the differential roll
motion equation may be random functions or para-metric excitations the determination of the sta-bility of the motion becomes a probabilistic prob -lem. However, the stability concepts of any de-terministic system are usually based on theLyapunov stability criteria (for example, seeCesari (1959)) and need be generalised in orderto discuss the stability of the random system.
In the deterministic case, let 0 E 0 be the equi-librium solution of the roll motion. Let the equi-librium be disturbed to an initial state To at timeto so that for all t> to the ensuing roll motion is0(t). The equilibrium solution is deemed stableif, given E >0, there exists a (E, to) such thatfor all t >to
110(t)11 < E
provided that 11 00L <1 initially and where thenorm
! I 0(t) I I = 0(01
can be chosen independent of to, the equi-librium roll motion solution 0E0 is referred toas uniformly stable.
If 0 a ais stable, and if, in addition
Lim I 0(t) I = 0t
equilibrium is said to be asymptotically stable.Further, if these stability conditions hold for anyinitial roll motion 0 the solution is asymptotic -oally stable in the large.
In other words, the roll motion of the ship isconsidered to be asymptotically stable if, afterthe ship has been disturbed from its initial equi-librium reference condition the resultant roll
motion dies out with time. If the roll motion in-creases with time then the motion is consideredunstable.
A generalisation of such deterministic stabilitycriterion encompasses the definition of route ormotion stability as proposed by the I. T. T. C.(1972). i.e. The stability of route or motion sta-bility is that property of a body or ship whichcauses it, when disturbed, to damp out extrane-ous motions set up by the disturbance and to re-duce them progressively to zero.
In the stochastic case, the norm 1! 0(011 is arandom process and the conditions of stability ofa deterministic system must be reformulated.
The stability concepts in the deterministic rollmotion case are defined in terms of convergencerelative to parameters such as the initial condi-tion, 00. or the time parameter, t, in the limit-ing process. It follows that there are at least asmany stability concepts for the study of thestochastic motion as there are for the study of thedeterministic roll motion. The deterministic con-cepts of stability have their counterparts in eachof the common modes of convergence of prob-ability theory, i.e. convergence in probability,expectations, almost sure converence etc.. Infact, there are at least three times as many con-cepts of stability for the stochastic roll motionas for the usual deterministic motion.
Kozin (1969) redefined the previous determ-inistic stability criterion in terms of the stabilityof the expectations of the stochastic motion asfollows:
a. Stability of the mean: The equilibrium rollmotion solution has stability in the mean if theexpectation exists and if, given E > 0, there ex-ists a n( E. to) such that for all t > to, the meanvalue of the norm,
E[ I I 0 (t) I I 1< 6
provided that I 00 I I < I initially. If,
Lim E[11 (t)11 1=0t
the equilibrium motion solution is said to haveasymptotic stability of the mean.
In other words, the stochastic roll motion ofthe ship is considered to have asymptotic stabilityof the mean if after the initial roll making dis-turbance, the mean roll motion dies out with
II
-
-

time. lithe mean roil motion increases with timethen the stochastic motion is considered unstablein the mean.
b. Stability of the mean square: The equilibriumroll motion solution has mean square stability if,given E >9, there exists an n(E , to) such that forall t > to the mean square value of the norm,.
El I 0(0'1 I 21 <
provided that I 001 < initially and where thesquare of the norm is by
1110(0112 -11 crqt)ii 2
If,
Lim Ef !Hat) 112 = 0t
the equilibrium roll motion solution is said to,have asymptotic stability of the mean square.
This definition may be expressed similarly to(a): but with 'mean roll motion' replaced by the'mean square roll motion', It is on these criteriathat the stochastic stability of the roll motion isnow defined. They are the counterpart concepts:usedindefining the stability of the deterministicroll motion..
3. Stochastic differentiationThe derivative of the stochastic roll 'motion
cD(t) may be defined as a limit i.e.
ocb(t) _d 0(0_ 10(t.5) - cD(t)dt _.0 5
If the limit exists for all functions of the motionprocess (1:)(t), then 6(0 has the usual meaning ofaderivative. Furthermore, the mean yalue of thederivative is given by,
E[cb(t)]=E[Lim / cb" 8) -"c13(t)}8. 0
1{EI cp(t + 8)]i 11(t)}'=Lim
8.0 1 5
=E (t-
Thus, the expected value of the stochastic pro-cess cD(t) is differentiable and its derivative.equals E[ (t)11. Hence it follows that if P denotesa differential operator we have,
cpE[(t)], = El Pi 0(01T
The auto -correlation function of the roll motionprocess cD(t) at time t =ti and t=t2 is defined by
Roo t2) =-E[ cD(t1), cD(t2):1
whilst it can easily be shown, (e.g. see Price,and Bishop (1974)) that the auto -correlation func -tion of the stochastic roll motion derivativessatisfy the relationships,.
d2 Roo ( ti, t2)1Rci)cb(ti -
d ti dt2
and if the process is stationary then,-d2111)01N
R (T)1-0cD
where T t1"
'I, Stability of simple deterministie and stochasticsystems,
For simplicity, we shall Iconsider initially the,following linear differential equation with con-stant coefficients which is assumed to describethe roll motion of the ship to a known bounded de-terministic roll moment i. a.
pi (Kt) c, t) +2,1; 030 q)(t) 4-t020 9(0 = K(t)
where the differential operator
d2"PI 11 + 2kca +c,)2.
°.dt 3dt2 -
The determination of stability criteria may be ob-tained from the impulsive equation,
P ci)(t)l 5(t)1
where am is the Dirac function. Multiplying theequation by e-iwt and integrating over the timeinterval produces the Fourier transform
1 1 1)=H)= = {+ 2ilccoo
with an inverse relationship
1 e'cot9(t,)
-2Tr-r.42 +Liii.c40,c,) +wo2
1
.2TrH(w) eiwt Q. h(t)
Coo,
where the receptanceII(ca) and impulsive function
2T
1105
I
t2)
=t2
=
-)
E[ I

106
h(t) satisfy the relationship. from the initial conditions the solution of the.stochastic differential equation is given by,
h(t) =27
5 H(w) eiwt du, and
00
H(w) 5 h(t) e dt.
By the residue theory, the roll response is givenby,
2
?(t) 2 Arer =1
where Ar is a constant and wr is a characteristicroot of the characteristic equation,
-(42 +2ikw0 w+(42 = 0o
Thus,
=ik L'CF- 1-1c2)
and the impulse roll response function
-kw V(1 -k2)itp(t) =Al e1 o o
+A2 e-k2)1t
which in the limit as t-.- becomes zero providedthat 0<k <1, u> 0 indicating that the system isasymptotically stable.
If the roll moment, K(t), is a bounded station-ary random process in the mean square, the re-sulting roll response is also a random processand the above procedure must be modified. Wemay obtain a deterministic differential equationby taking the ensemble average of the stochasticdifferential equation. This results in an equationin the deterministic variable E[(t)] and determ-inistic moment E[K(t)] is given by,
P1E[c(t)] =E[K(t)].
By now repeating the above procedure we obtain.
E[?(t)] =131 el-i"o+I01- -k21k t
2)t+B2 e/-1-")o -1'0 1/0- -1<
and the system is asymptotically stable in themean provided that 0< k <1 and wo >O.
Apart from the deterministic terms obtained
p(t) = f h(t --r) K(7) d
where the impulse function,
-kwoth(t) - sinc0:V1 -k2) t t >0
V(1 -k2)
=0 t<0
and h(t -T) = 0 for 7 >t.By multiplying the response 9(t) at times t1, t2
and averaging we have.
R( t1, =E[c(ti) o(t2)1= f f h(ti -
h(t2 -T2) E[K(T1)K(72)] d Ti d
= I 5 h(ti - h(t2 -T2)-
RKK(71 72) dTid 72.
By modifying the method used by Samuels (1061)we may transform this integral relationship intothe differential equation,
P21R99(ti, t2)=RKK(ti -t2)
where
p.+ 2k wdt.
9
2 ° - °d i =1, 2.
and-Ti)1 -5(ti -70.
The change of variable,
T =t1 t2 t
transforms the differential equation to,
M211=199(t,.t - T)i =RI<K(T)
where the differential operators,2
a a a4.° N., 2=(--+) 2k cz° at art 0
and9
r , a , 2.M2= 9 " oT 087'
t
p-kco +0
Ti)
P1
-at

11
In order to determine criteria for the stabilityof the mean square when the roll moment fu,nc--ion bounded in the mean square, it is suffi-
cient to consider the impulsive equation,
M2.1R9p . t - 7)1 = 5 (t) 5(7).
The solution of this equation obtained by using thedouble Fourier transform is given by.
.R9p(t, t -7
2 2
RcpT (t, t -7) 2 2 A eM
T =1 M
eilwt + AO. - dcz,d
2. 2,2 . 2(w -21k wow -coo)( A -211: co6X -coo)
Which by the residue theorem takes the form,
ic)rt.4-Am(t -7)4
where Arm denotes a conrstant
and co XM are theeigenvalues of the characteristic equation,
x,(0o2 - 2ik coo 2 ik0 =
The roots of this algebraic equation are
=1"b+_`')o1417-7:2')
=ikca C+) 17.
and at 7 =0, the mean square value of the response'is given by,
R (t t)--=E[cp2(t)II99
=A e-21<wt
,u
+Al e2kczct+ico1-17;2)o
+ A2 e-k -icoolti(1 - k2)1' t
The system is asymptotically stable in the meansquare provided that OK lc,- 1 and coo >0 since inthis case,
Lim Rpp (t,, t) 0,t 4.=
5. Stability- of dotermini4r. time dependent systemA more realistic mathematical model describ-
ing the rolling mode of a ship. in a deterministicseaway was considered by Grim (1952) in whichthe variation of the metacentric. height was in-.eluded. This introduced a periodic time dependentcoefficient into the differential equation which
was expressed by Vossers. (1962) as
,6(t) +2k(oo $(t) +c 9(1 + p cos um. cDf 00Koo, cos cot.
The homogeneous equation is given by
+2"kco0 $(t)+4;(1.. +Acoswt) $(t) =0
which by the transformation,
t$(t) =y(t) e x =c,)t
reduces to the following equation,9
+1(.6 + cos x) y = 0dx2
where
co2(1 -k2) 2
and E --
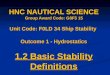
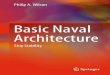
The homogeneous equation has reduced to thestandard form of the Mathieu equation. Althoughthe general solution of the Mathieu equation is.not known, the stability of its solutions may be'deduced from a stability chart in the (a, a) plane..This chart consists of a set of curves of the form5=5(a) which divides the ( E , a) plane into stableand unstable regions. For values of ( ), whichdefine ,a point embedded in a stable region, the.solutions of the Mathieu equation are bounded andstable. For values of (a /4-0, 5) defining a point onthe boundary, or embeddedin an unstable region,the solutions of the corresponding Mathieu equa-tion are unbounded and unstable. The stabilitychart of a Mathieu equation is shown i.n Figure 1where the shaded areas are the stable regions.Thecurves 5 =53( a) defining the boundary betweenstable and unstable regions have been ap-proximated by Stoker (195.0). as power expansionsin a., and these approximations are satisfactoryfor moderate values. of E as shown in Figure 2.
The stability chart shows that the, unstableregions approach the 8-axis in indefinitely .closein the neighbourhood of
m2= for m =01, 4-1, -"2, .
If = 0 and a :0 (k .1)., all solutions of the free-motion.are bounded and stable_ However, for ar -bitrary values of the parameters .a and 5, thestability condition may be obtained from the ( a , 5)1chart. For a damping factor k <1 and parameter
107
1
4+(21
is
=
t
=
(t)
yE
-
,

108
Figure 1.
Figure 2.
=1+
0 (i.e. 5 > 0 and E j= 0 respectively) values ofthe wave frequency may exist such that solutionsare unstable. These values of wave frequency aregiven by
c)Oim T. 2(1 -k-) --= (1 - k ) for m - 0,1 , 2, ...
2 To
where T is the wave period and To is the naturalwave period of roll. The above instability cri-terion for k 0 was first determined by Grim(1952) when analysing the roll behaviour of a shiprunning in head waves and further demonstratedexperimentally by Kerwin (1955).
The non-homogeneous equation may be ex-pressed as
9d- y2(0 COS x) y K4` cos x
dx
where K* =K A.2. This has again a Mathieuan anequation form but now includes a roll momentterm of the same frequency as the time dependentcoefficient. Rosenberg (1954) has shown that suchequations have instabilities for the same valuesof the parameters E and 5 as the homogeneousMathieu equation.
6. Stability of siochastie time dependent systemsa. Stability of the mean.
The stochastic differential equation describingthe rolling mode of a ship in a random seawaymay be written as follows,
43(0 + 2k wo (t)+p(t) +(t) qo(t) =K(t)
or,
p(t)1 = K(t) - a(t) 9(0
where now K(t) is a random roll moment and a(t)is a random coefficient both related to the sea-way. Apart from the initial conditions at t = 0, theintegral solution of the differential equation is,in terms of the impulsive function, given by,
DC
p(t)= J h(t - 71) -a(Ti) q)(71) I d Ti.
On averaging the solution we have
E[W)I - I h(t lE[K(71)]
-E[a(Ti)?(Ti)ii d-ri
which contains the additional unknown E[a(t) TM].However, by multiplying the initial stochasticdifferential equation by a(t1),a(t1) a(t2) a(ti)
a(t) and then averaging produces the set ofhierarchy equations,
PIE[p(t)1} --E[K(t)] -Ek,-(t) p(t)]
PIE[a(t1)9(t)11-E[a(t1)K(t)] - E[a(ti) a(t) 9(t)]
etc.
Since it is not possible in general to solve the
=
00
= - Ti)

infinite number of averaged hierarchy equationsit becomes necessary to truncate the sequenceat a preferably low order. Richardson (1963)showed that such a truncation may be achievedby writing,
E[a(ti)... a(t) TM] E[a(ti). a(t)] E[cp(t)]
which is equivalent to the local independence as-sumption of Bourret (1962). In the simple case.
E[a(ti) a(t) p(t)] =E[a(ti) a(t)] E[p(t)]
and the hierarchy equations reduce to a closedsystem of two equations given by,
PIE[p(t)] =E[K(t)] - E[a(t) cp(t)]
P/E[a(ti) p(t)]) E[a(ti) K(t)]
-E[a(ti) a(t)] E[l)(t)].
The solution of the last equation is given by,
E[o(t)] - 5 5 h(t - Ti) h(Ti - T2) Raa(T/ -T2)
00
E[o(T2)] dT1 dT, =j h(t - Ti) K(Ti) d
R (T - dT dTak 1 1 2
which transforms into the differential form.
PIE[o(t)]/ - f h(t -72) Ran(t - 72) E[(72)1 d T9
00
=E[K(t)] - f h(t -72) Pt ltd-72, _72
after applying the operator P/ and using theresult that
Plh(t)/ =5(t)
Since the stationary random process a(t) is re -latedto the seaway which is described by a wide-band process (i. e. the bandwidth parameter E. -.1as determined from the Pierson-Moskowitz spec -trum), then the correlation time of the processa(t) is very short. Thus, R(T) decreases veryrapidly for increasing 1. and
!Rol »Ril»iR21>...E[a(ti) p(t)] = 5 h(t - 72) lE[a(tir) K(72)]
where Rn= J R(T)dT.-E[a(t1)a(72)]E[?(72)11c172
which at t1 - T1 becomes, By letting s =t -T9 the series expansion of theintegral is given by,
E[a(71),p(71)] =5 h(71 - ) (
RaK 71 72)5 h(s)Rcza(s)E[cD(t -s)] ds
0.3
-Raa(Ti - E[1(T2)]; d T200
where the correlation functions of the stationary - f h(5)Ra(s)1E[0(t)] +sE[CD(t)]random processes a(t), K(t) are given by,
RaK(T172) =E[a(71) K(72)] and s2E[(t)].. ds
2Rac,(71 -72) =E[a(71) a(72)].
E[GD(t)] mi E[cio (t)]The equation describing the mean roll motion
is given bywhere m= = 5 snh(s)R (s)ds, (n =o, 1, ...), andan
the differential equation for the mean rollresponse reduces to,
E[CD(t)] ±(2k,..)0 - m1) E[D(t)]C../20 - M0) E[cp(t)]
The complementary solution, obtained by set-
109
-5 5 h(t - Ti) (Ti T2)
=E[K(t)] - f h(t -12)RK(t -72) d 12.
-
-
-
=t
- 72)
,
00
-
a
- EIG)(t)1 -

il0
ting the right-hand zero, has the form
9
EICDMI 2 Ar ePr tr =1
where Ar is a constant and pr are the eigenvaluesof the characteristic equation,
p- -4- (2k wo p + c.)20 -m0) =0
given by,
Pl, 2 r -(k -12m1) + wo2(1 -k2) +k2
-11111 mo
The asymptotic stability of the mean exists pro-vided that,
9 2kwo> ;1-ri1 and w-0(1 -k2)> mo +%m -kW() n.11,
and a limited stability of the mean exists when,2m A
and }two>o o o -
giving a zero valued root of p and a constant meanvalue of the roll response as
la. Stability of the mean square.By multiplying the integral solution,
CD(t) = I h(t -7) K(7) -a(7) cp(7)1 dT
of the stochastic differential equation at timest1, t2 and then averaging the product we obtain,
13$0(t1, t2)=E[cD(t1) -cp(t2)]
= 5 5 h(ti -71) h(t9
IRKK(71 -79) -E[K(71) a(72)
$(72)] -E[K(72)a(71) (Ti)]
+E[a(71)a(72) 0(71)
cl)(72)11 d T1 d72.
This contains the unknown terms E[K(71)a(72)p(72)], E[K(72) a(71) (71)] and E[(71) a(T2) cD(71)$(79)]. From the previous section it was assumedthat in order to obtain a closed set of hierarchyequations we have,
E[K(71) a(72) T(72)] = E[K(71)C1(72)1E[ 0(72)]
=RKa(71 -T2) E[cD(72)]
E[K(-12) C1(71) (I)(71)1 F1< T2 _Ti) E[(1-1)1
and we shall now assume that,
E[a (71) a(T2) cp(71) cD(79)1
=Era( Ti) a(72)1 E[°(71) °(72)]
=R(71 -79) Roo (Ti, 72).
This latter condition has also been adopted bySamuels (1960) and the covariance integral equa-tion may be rewritten as,
cc.
Rvi) t2) -5 5 h(ti -71) h(t2 - 72)
Raa (71 -79) Bcpcl) (T1 72) d 71 d 72
,NO
= 5 f h(ti - 72) h(t2 - 72) IREK(71 - 72)00-00
RKa(Ti - 79) E[c)(72)] aK(71 -72)
E[0(71)]td71d72
since R (al<S1 -72) rilKa(72 -71)By the procedure described in section(a) we
may transform this integral relationship into thedifferential equation,
Mi M2 Rizo (t, t -7) -Raa (7) R,D0 (t, t
=RKK(7) -RKa(7) E[$(t -7)] -RaK(7) E[a)(t)].
Provided that the system is stable in the meanexpectation such that, E[cD(t)] is bounded togetherwith bounded covariance functions RKK, Ricci andRaK , then the previous equation may be replacedby the impulsive equation,
Mi M2 Roo (t, t -7) -Raa(7) Ro(t, t -7)
=5(t) 8(7).
Papoulis (1965) has shown that if the auto-cor-relation function R(T) is analytic then it maybe expressed by the Taylor series
9d-Raa(0)
R(T)=R(0)+T
d 72
since the odd time derivatives of the stationaryrandom process are zero. The mean squarestability criteria are determined when T =0, and
2
-
-
-
-
Raa(T)1=Raa(,0) +

may be obtained from the simplified differentialequation,
M.2 Roo (t, t -T) -Raa(0) Roo (t. t -T)
=5(t)8(T)
which has solution
1R,Do(t, t -T) =
4.n.2I
-
eilwt +Mt -"*da)dA(.2 22-2ikco co-co 1(7' -21ka, -cc') -R (0)
o o o o aa
This may be evaluated by the theory of residuesand the mean square value of the roll responseis given by,
zorRoo (t, t) =E[cD2(t)I = 2 Are r)t
r=1
where A is a constant and co . A are the eigen-rvalues of the characteristic equations. Solutionsof co and Ar are given by
/I 9 2R00 (0)
(w+A)1,2=2ika,0 (.-(1-k ) ---v o -1(`)
The asymptotic stability of the mean square isvalid, provided that,
q(1 - k2) (0), 0<k <1
although, limited stability of the mean squareexists when
.40(1 -k2)(1 3k2) =Raa (0)
resulting in a zero valued root of A) and themeansquare value of the roll response is a con-stant in the limit as t
7. ConclusionsThe restoring moment coefficient in the dif-
ferential equation describing the roll motion of aship in a seaway is assumed either sinusoidal orrandom time dependent in form. For a de-terministic seaway, the resulting Mathieu equa-tion describing the ship's response indicates manyregions of stability and instability. In contrast.the analogous random situation is governed byconditions deter mined from a simplified analysisinvolving the mean and mean square expectationstatistics. Although criteria obtained from the
latter expectation hold provided that the meanvalue of the response is bounded, it appears forpractical application to assume that this is alwaysso.
Since the restoring coefficient is dependent onthe form of the seaway, it appears beneficial toconsider stability in the mean square expectationrather than the mean expectation. In this way,the stability criteria being a function of the auto -correlation function of the restoring coefficient,may be related to the auto-correlation functionof the seaway and hence to the spectral densityfunction of the irregular seaway. In other words,the criteria for the mean square expectation isdependent on energy content of the seaway.
From the simplified analysis of the problemdiscussed, it is evident that by considering theexpectations of the roll motion response thentheoretical stability criteria may be deduced evenfor a ship in a random irregular seaway.
ReferencesBoese, P. , 'Steering of a ship in a heavy following
seaway', Jahrbuch der Schiffbautechnischen Ge-sellschaft, 1969. (DRIC translation no. 2807).
Bourret, R. C. , Stochastically perturbed fields withapplication to wave propagation in random media',Nuovo Cimento, Vol. 26, pp. 1-31, 1962.
Cesari, L. , 'Asymptotic behaviour and stabilityproblems in ordinary differential equations',Springer-Verlag, Berlin. 1959.
Davidson, K.. 'A nbte on the steering of ships infollowing seas', .5th International Congress ofApplied Mechanics, London, 1948.
Grim, 0. , 'Rollschwingungen Stabilitat und Sicher -keit im Seegang', Schiffstechnik, Band 1, pp.10-21, 1952.
Grim, 0. , 'Surging motion and broaching tendenciesin a severe irregular sea', Stevens Institute ofTechnology, No. 929, 1962.
Kerwin, J. E. , 'Notes on rolling in longitudinalwaves', International Shipbuilding Progress,Vol. 2, pp. 597-614, 1955.
Kozin, F. , 'A survey of stability of stochastic sys-tems', Automatica, Vol. 5, pp. 95-112, 1969.
Lewis, E. V. and Numata. E. 'Ship motions in obliqueseas', Trans. SNA ME, Vol. 68, pp. 510-547,1960.
Mandel, P. , 'Ship manoeuvring and control',. Prin-ciples of Naval Architecture, (ed. J. P. Comstock),Chapter 8, SNA N1E. 1967.
International Towing Tank Conference, 1972. Ham-burg.
Papoulis, A. , 'Probability, random variables andstochastic processes', McGraw-Hill Press, 1965.
X
r
r
( 1
(ca+
1., ,
2. ,.
,
,
,
,
,
,
,
,

112
Price, W. G.. 'The stability of a ship in a simplesinusoidal wave'. International Symposium onDirectional Stability and Control of Bodies Movingin Water, (ed. R. E. D. Bishop, A. G. Parkinson,R. Eatock Taylor), pp. 167-179, 1972. I. Mech.E. London.
Price, W. G. and Bishop, R. E. D. , 'Probabilistictheory of ship dynamics', Chapman and Hall.London, 1974.
Richardson, J. M. , 'The application of truncatedhierarchy techniques in the solution of stochasticlinear differential equations', Sixteenth Sympo-sium in Applied Mathematics, pp. 290-302, 1964.
Rosenberg, R. M.. 'On the stability of a nonlinear,non-autonomous system', Second U.S. Congressof Applied Mathematics. Ann Arbor, 1954.
Rydill, L. J.. 'A linear theory for the steered mo-tion of ships in waves'. Trans. RINA, Vol.101,pp. 81-112. 1959.
Samuels, J. C. , 'On the stability of random systemsand the stabilization of deterministic systemswith random noise', Journal of the Acoustical
Society of America, Vol. 32, pp. 594-601, 1960.Samuels, J. C. , 'Theory of stochastic linear sys-
tems with Gaussian parameter variations', Jour-nal of the Acoustical Society of America, Vol.33, pp. 1782-86, 1961.
Stoker, J. J. , 'Nonlinear vibrations in mechanicaland electrical systems', Interscience, New York,1950.
Vossers, G. , 'Resistance, propulsion and steeringof ships', The Technical Publishing Company,the Netherlands, 1962.
Wahab, R. and Svaan, V.A., 'Coursekeeping andbroaching of ships in following seas', Interna-tional Shipbuilding Progress, Vol. 11, pp.293-302, 1964.
Weinblum, G. and St. Denis, M., 'On the motions ofships at sea', Trans. SNAME, Vol. 58, pp.184-231, 1950.
Weinblum, G. , 'On the directional stability of shipsin calm water and in a regular seaway', FirstU.S. Congress of Applied Mechanics, Chicago,1951.
13.
14..
.
1,8.
19,.
,
,
,