Embed Size (px)
Citation preview

UNCLASSIFIED
UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces
UNCLASSIFIED
A Practical Approach to Understanding Robot Consciousness
Kristin E. Schaefer1, Troy Kelley1, Sean McGhee1, & Lyle Long2 1US Army Research Laboratory 2The Pennsylvania State University
Designing a Conscious Robot Workshop, Tucson, AZ, 25 April 2016

UNCLASSIFIED
UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces
Can a robot be conscious? OR
Is it the degree to which the human interacting with the robot perceives it to be trustworthy?

UNCLASSIFIED
UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces
CONSCIOUSNESS is MORE than just INTELLIGENCE Kelley, T. D., & Long, L. N. (2010). Deep Blue cannot play checkers: The need for generalized intelligence for mobile robots. Journal of Robotics.
Can a robot be conscious?

UNCLASSIFIED
UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces
Can a robot be conscious?
Is CONSCIOUSNESS the same thing as AWARENESS? • Subjectivity: Meaning derived from ones
own ideas, moods, and sensations
• Unity: All sensor modalities melded into one experience
• Intentionality: Experiences have future meaning
• Others?
Kelley, T. D., & Long, L. N. (2010). Deep Blue cannot play checkers: The need for generalized intelligence for mobile robots. Journal of Robotics.
Ex Machina, Universal Pictures
UNCLASSIFIED
UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces
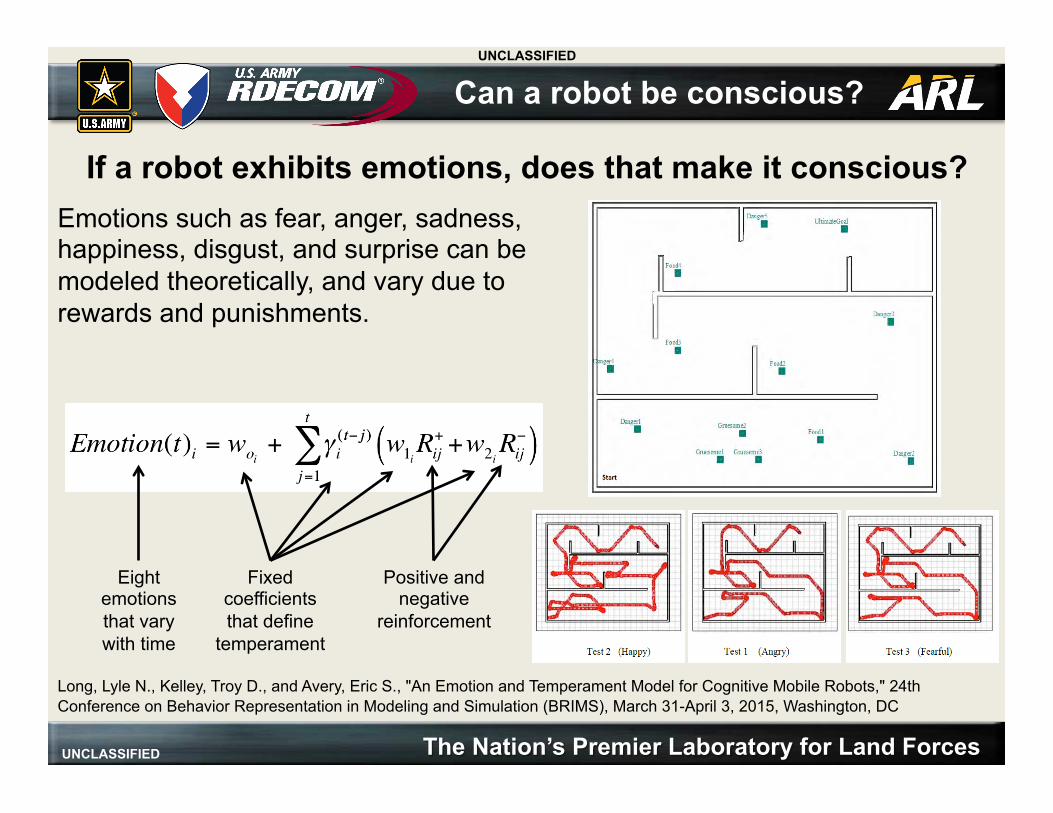
If a robot exhibits emotions, does that make it conscious?
Emotions such as fear, anger, sadness, happiness, disgust, and surprise can be modeled theoretically, and vary due to rewards and punishments. Long, Lyle N., Kelley, Troy D., and Avery, Eric S., "An Emotion and Temperament Model for Cognitive Mobile Robots," 24th Conference on Behavior Representation in Modeling and Simulation (BRIMS), March 31-April 3, 2015, Washington, DC
Can a robot be conscious?
Eight emotions that vary with time
Positive and negative
reinforcement
Fixed coefficients that define
temperament
UNCLASSIFIED
UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces
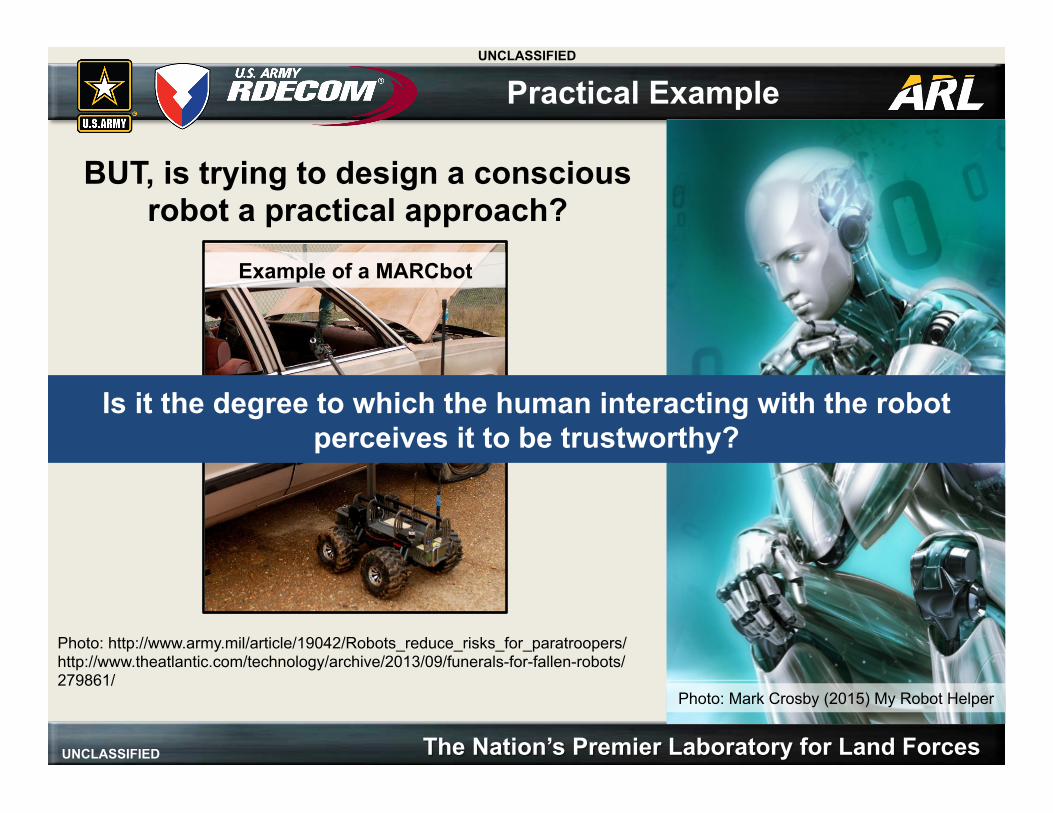
BUT, is trying to design a conscious robot a practical approach?
Photo: Mark Crosby (2015) My Robot Helper
Photo: http://www.army.mil/article/19042/Robots_reduce_risks_for_paratroopers/ http://www.theatlantic.com/technology/archive/2013/09/funerals-for-fallen-robots/279861/
Example of a MARCbot
Practical Example
Is it the degree to which the human interacting with the robot perceives it to be trustworthy?
UNCLASSIFIED
UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces
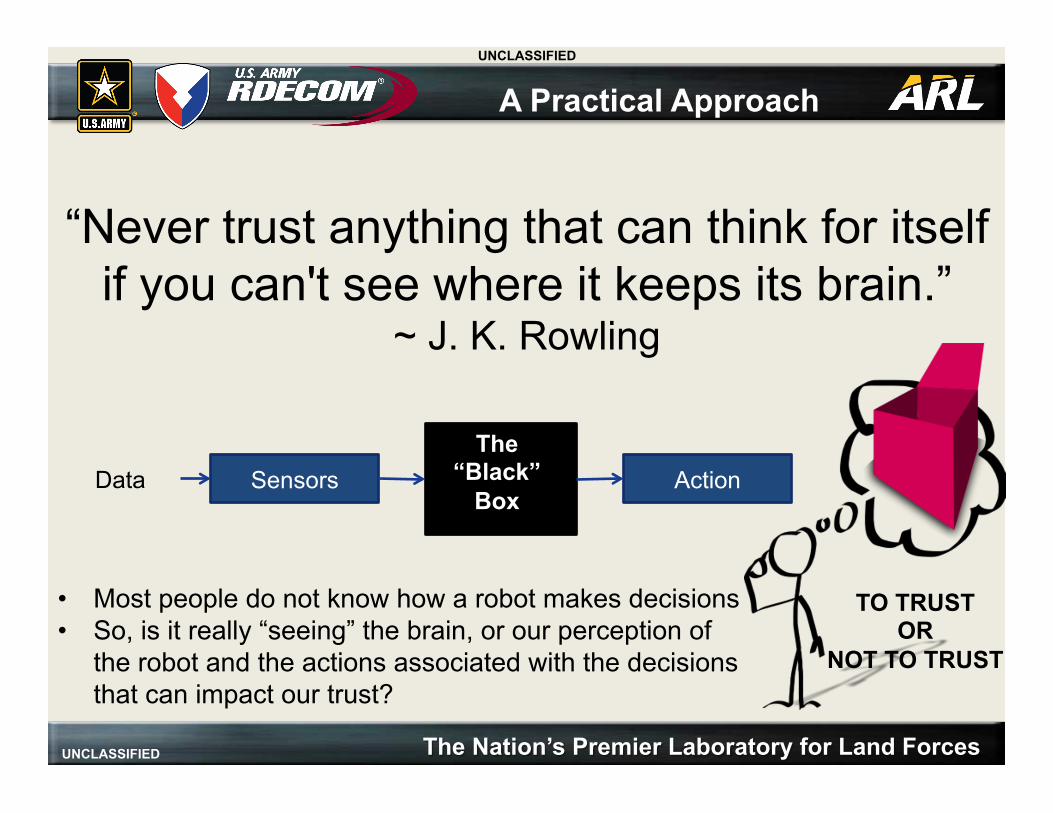
“Never trust anything that can think for itself if you can't see where it keeps its brain.”
~ J. K. Rowling
• Most people do not know how a robot makes decisions • So, is it really “seeing” the brain, or our perception of
the robot and the actions associated with the decisions that can impact our trust?
TO TRUST OR
NOT TO TRUST
Sensors Action The
“Black” Box
Data
A Practical Approach
UNCLASSIFIED
UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces
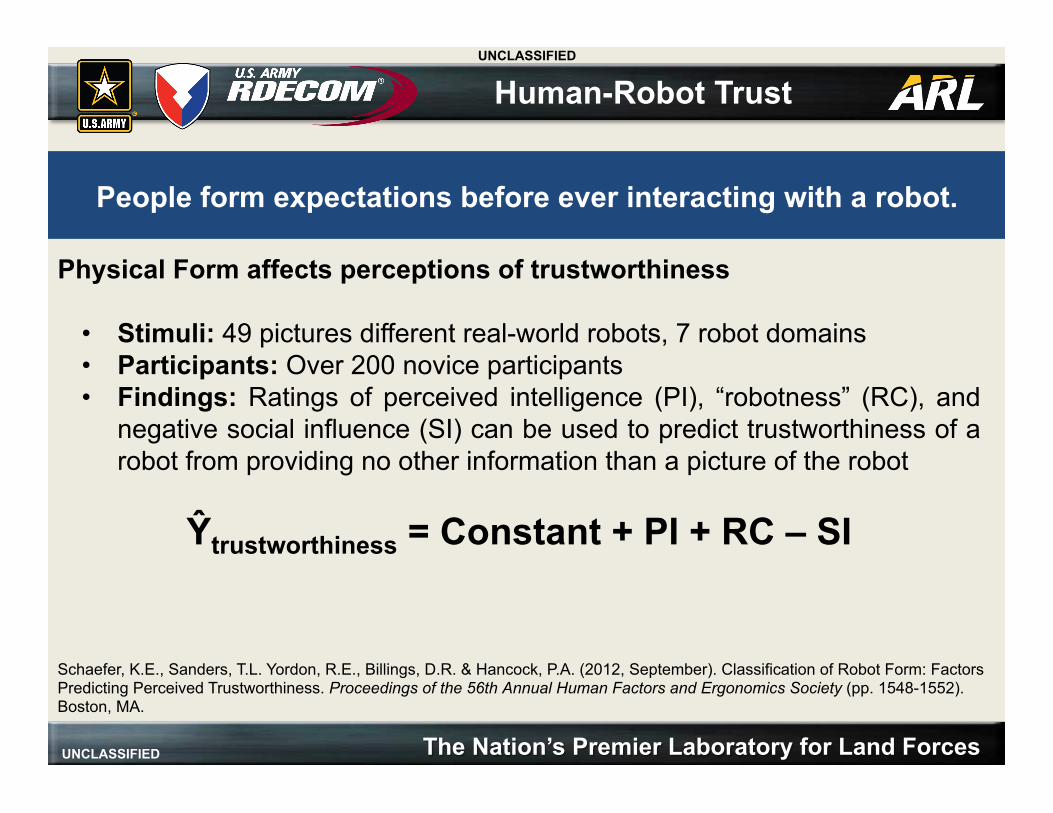
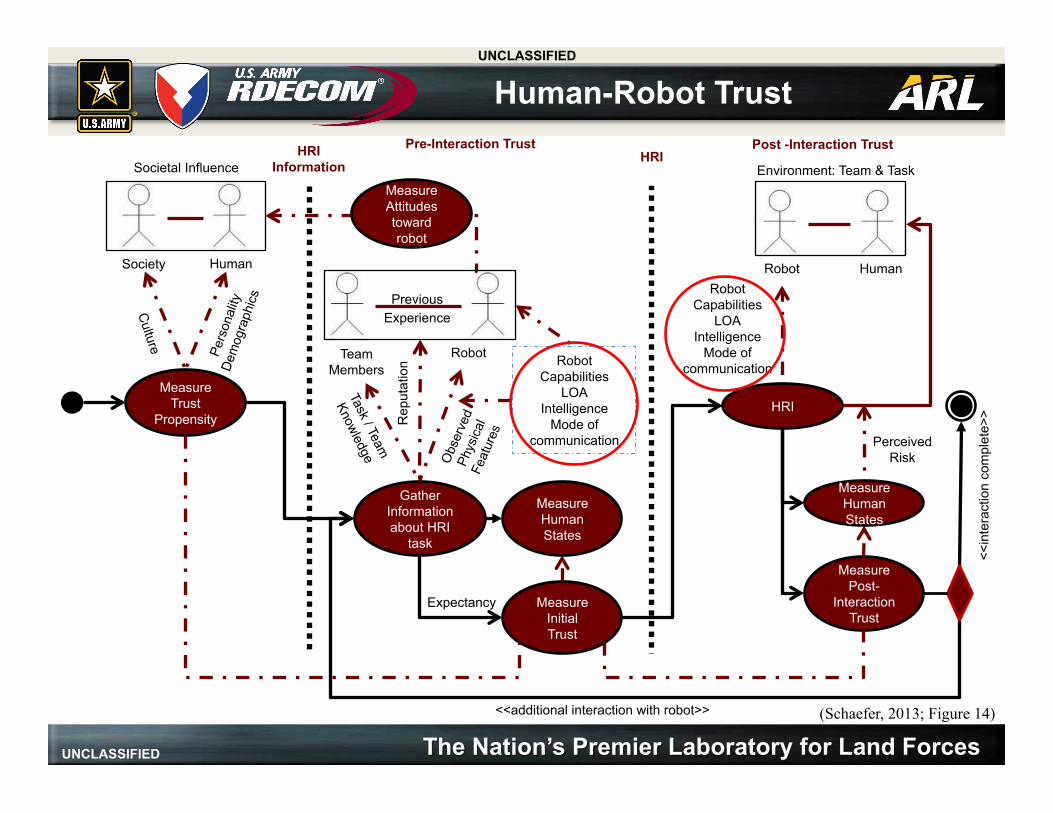
Human-Robot Trust
Physical Form affects perceptions of trustworthiness
• Stimuli: 49 pictures different real-world robots, 7 robot domains • Participants: Over 200 novice participants • Findings: Ratings of perceived intelligence (PI), “robotness” (RC), and
negative social influence (SI) can be used to predict trustworthiness of a robot from providing no other information than a picture of the robot
Ŷtrustworthiness = Constant + PI + RC – SI
People form expectations before ever interacting with a robot.
Schaefer, K.E., Sanders, T.L. Yordon, R.E., Billings, D.R. & Hancock, P.A. (2012, September). Classification of Robot Form: Factors Predicting Perceived Trustworthiness. Proceedings of the 56th Annual Human Factors and Ergonomics Society (pp. 1548-1552). Boston, MA.

UNCLASSIFIED
UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces Schaefer, KE (2013) The Perception and Measurement of Human-Robot Trust. Doctoral Thesis. Figure 14
Rep
utat
ion
Culture
Measure Trust
Propensity
Human Society
Gather Information about HRI
task
Team Members
Robot
Pre-Interaction Trust
Measure Initial Trust
Measure Human States
HRI Information
Robot Capabilities
LOA Intelligence
Mode of communication
Expectancy
Previous
Experience
Measure Attitudes toward robot
Societal Influence HRI
Tasking
Human-Robot Trust
Ŷtrustworthiness = Constant + PI + RC – SI
Boston Dynamics, BigDog
Expectations
UNCLASSIFIED
UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces (Schaefer, 2013; Figure 14) <<additional interaction with robot>>
<<in
tera
ctio
n co
mpl
ete>
> Rep
utat
ion
Culture
Measure Trust
Propensity
Human Society
Gather Information about HRI
task
Team Members
Robot
Pre-Interaction Trust
Measure Initial Trust
Measure Human States
HRI
Measure Post-
Interaction Trust
Post -Interaction Trust HRI Information
Robot Human
Robot Capabilities
LOA Intelligence
Mode of communication
Environment: Team & Task
Robot Capabilities
LOA Intelligence
Mode of communication
Expectancy
Perceived Risk
HRI
Previous
Experience
Measure Human States
Measure Attitudes toward robot
Societal Influence
Human-Robot Trust
UNCLASSIFIED
UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces
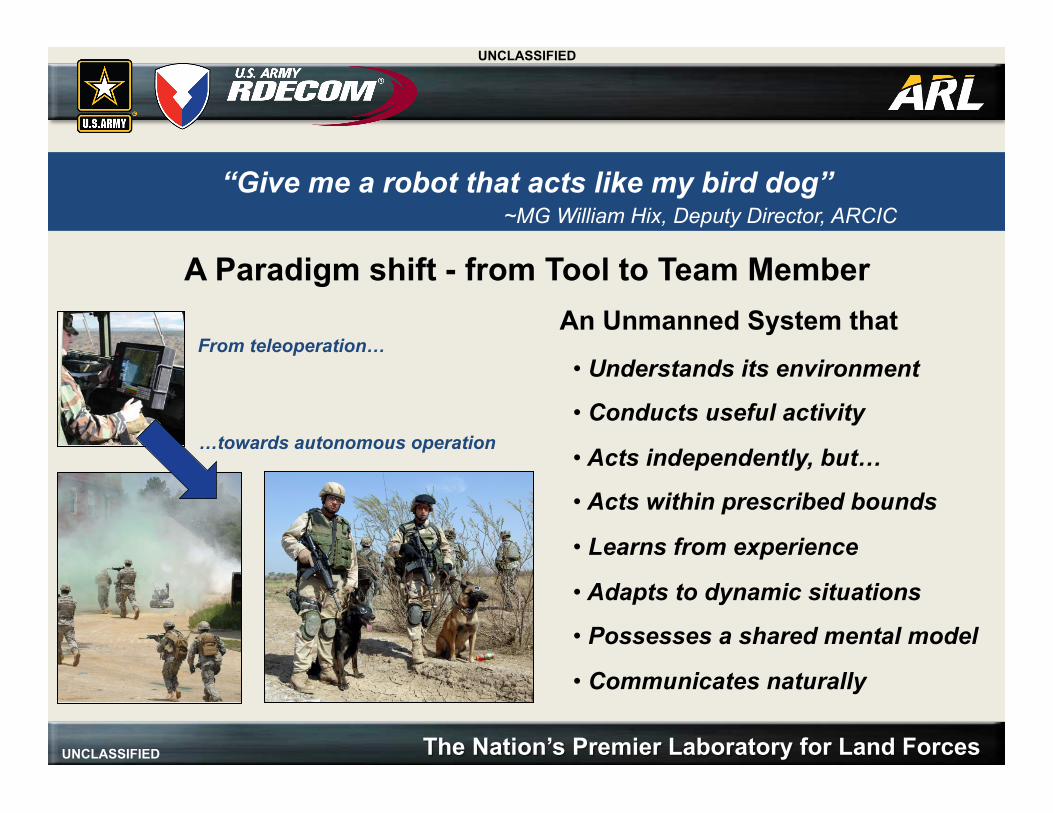
A Paradigm shift - from Tool to Team Member
From teleoperation…
…towards autonomous operation
• Understands its environment
• Conducts useful activity
• Acts independently, but…
• Acts within prescribed bounds
• Learns from experience
• Adapts to dynamic situations
• Possesses a shared mental model
• Communicates naturally
An Unmanned System that
“Give me a robot that acts like my bird dog” ~MG William Hix, Deputy Director, ARCIC

UNCLASSIFIED
UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces
Robot Design
Long, L.N., & Kelley, T.D. (2010). Review of Consciousness and the Possibility of Conscious Robots. Journal of Aerospace Computing, Information, and Communication, 7, 68-84.
A theoretical approach for designing the underlying information processing architecture
Goal: Move away from over-specialized design to more generalizable decision-making capabilities
UNCLASSIFIED
UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces
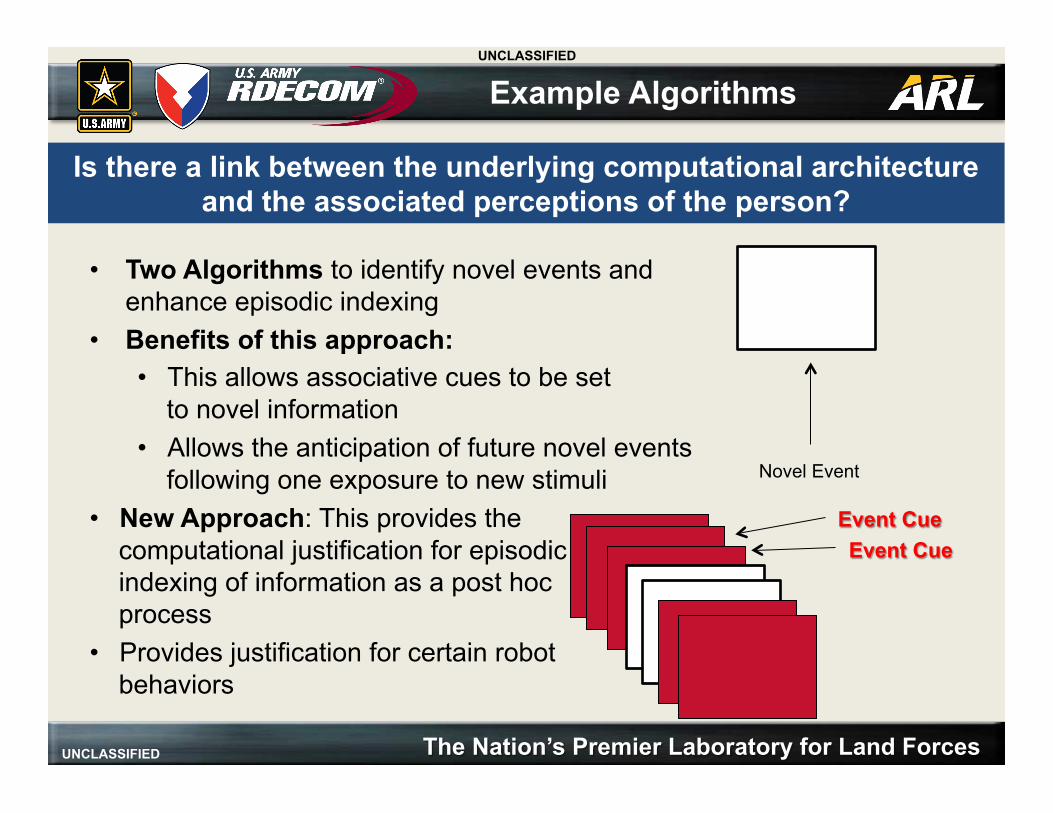
• Two Algorithms to identify novel events and enhance episodic indexing
• Benefits of this approach: • This allows associative cues to be set
to novel information • Allows the anticipation of future novel events
following one exposure to new stimuli • New Approach: This provides the
computational justification for episodic indexing of information as a post hoc process
• Provides justification for certain robot behaviors
Example Algorithms
Novel Event
Event Cue Event Cue
Is there a link between the underlying computational architecture and the associated perceptions of the person?

UNCLASSIFIED
UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces
Novelty Algorithm
Kelley, T. D., & McGhee, S. (2013, May). Combining metric episodes with semantic event concepts within the Symbolic and Sub-Symbolic Robotics Intelligence Control System (SS-RICS). In SPIE Defense, Security, and Sensing (pp. 87560L-87560L).
Let α = vector of observations Let β = number of observations in α Let µ = matrix of observation correlations Let T = threshold value for a correlation Let B = % of T, give set of observations Let γ = number of correlations that exceed the threshold T
Let α = vector of observations Let β = number of observations in the vector α Let µ = matrix of observation correlations (2 dimensions) Let T = threshold value for a correlation value to be considered “bored” Let B = percentage of T for the robot to be considered “bored” for the given set of observations Let γ = number of correlations that exceed the boredom threshold T γ 0 for i = 0 β – 1
for j = 0 β – 1 if i == j continue µ i,j correlation(α i , α j) if µ i,j > T then γ γ + 1 end
end or, where x = correlation(α i , α j):
γ = # 𝑓(x)𝛽−1
𝑖,𝑗=0𝑖≠𝑗
> T
Let τ = percentage of correlations that exceed the boredom threshold T τ = γ/ ((β2 – β)/2) if τ > B then RobotStatus “BORED” else RobotStatus “NOT BORED” end
Let α = vector of observations Let β = number of observations in the vector α Let µ = matrix of observation correlations (2 dimensions) Let T = threshold value for a correlation value to be considered “bored” Let B = percentage of T for the robot to be considered “bored” for the given set of observations Let γ = number of correlations that exceed the boredom threshold T γ 0 for i = 0 β – 1
for j = 0 β – 1 if i == j continue µ i,j correlation(α i , α j) if µ i,j > T then γ γ + 1 end
end or, where x = correlation(α i , α j):
γ = # 𝑓(x)𝛽−1
𝑖,𝑗=0𝑖≠𝑗
> T
Let τ = percentage of correlations that exceed the boredom threshold T τ = γ/ ((β2 – β)/2) if τ > B then RobotStatus “BORED” else RobotStatus “NOT BORED” end
Nothing has changed
Novel event occurred
% of correlations that exceed the threshold

UNCLASSIFIED
UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces
Episodic Indexing Logic Flow
Episodic indexing allows anticipation of future novel events following one exposure to new stimuli
Identify the event prior to the novel event (3e) Create New Episode (nE) starting with the event just prior to the novel event
(nE) = (3e:6e) Convert 3e to symbolic information based on current goal (g) and current symbolic perceptual (p) information
(nE) = (ei (g,p):6e) Convert Novel events (4e:5e)= to symbolic (s) event information
(nE) = (ei (g,p):(s):6e) Convert 6e to reinforcement information (R)
(nE) = (ei (g,p):(s):R) Repeat until the end of collected episodes
resulting in
1 2 3
4 5 6
..n
Episode (E) = set of events (1e:ne)
Last event before novel Event (3e)
Novel Events (4e:5e)
Reinforcement (R)
{nE | nE = en(goal/perception):(s):R} Kelley, Troy D., (2014), Robotic Dreams: A Computational Justification for the Post-Hoc Processing of Episodic Memories, Intl. Jnl. of Machine Consciousness, Vol. 6, No. 2, pp. 109- 123.
UNCLASSIFIED
UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces
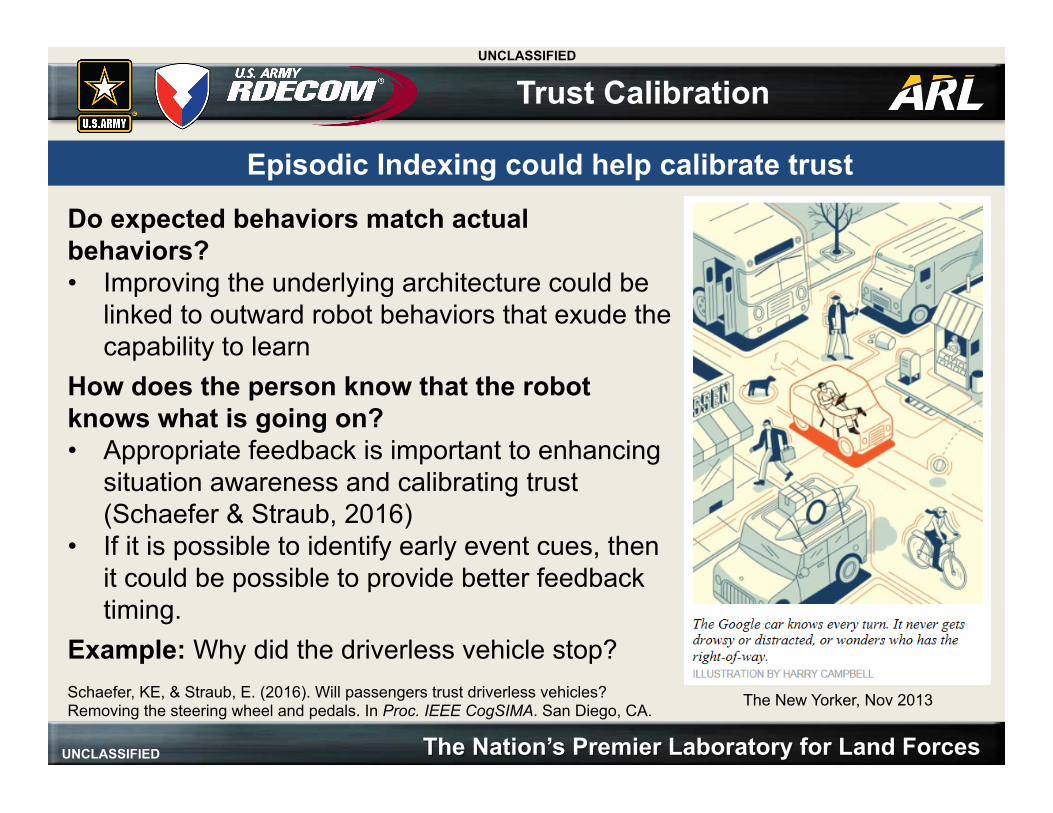
Trust Calibration
Episodic Indexing could help calibrate trust
Do expected behaviors match actual behaviors? • Improving the underlying architecture could be
linked to outward robot behaviors that exude the capability to learn
How does the person know that the robot knows what is going on? • Appropriate feedback is important to enhancing
situation awareness and calibrating trust (Schaefer & Straub, 2016)
• If it is possible to identify early event cues, then it could be possible to provide better feedback timing.
Example: Why did the driverless vehicle stop?
The New Yorker, Nov 2013 Schaefer, KE, & Straub, E. (2016). Will passengers trust driverless vehicles? Removing the steering wheel and pedals. In Proc. IEEE CogSIMA. San Diego, CA.
UNCLASSIFIED
UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces
Conclusion
Practical Approach: Near-term robots that can make appropriate decisions in novel, high-risk environments
Successful Human-Robot Interaction: This is based in part on the trust perceptions of the person interacting with the system • Individuals may have very limited knowledge of how a robot makes
decisions or processes information • All they “know” is based on the behaviors of the robot and the feedback
from the robot
Possible Considerations: • Information processing approach to robot design is fast and
relatively simple • Episodic indexing was found to be efficient process for recognizing
novel events and helping to store memories • Trust Calibration: The concept of episodic indexing could be linked to
the timing of robot feedback

UNCLASSIFIED
UNCLASSIFIED The Nation’s Premier Laboratory for Land Forces
Contact Information
Trust: Kristin E Schaefer [email protected]
Novelty Algorithm: Sean McGhee
Intelligence/Episodic Indexing: Troy Kelley [email protected]
Information Processing/Robot Emotions: Lyle Long





























