Embed Size (px)
Citation preview

Expert Systems with Applications 39 (2012) 1779–1783
Contents lists available at SciVerse ScienceDirect
Expert Systems with Applications
journal homepage: www.elsevier .com/locate /eswa
A Novel non–Lyapunov way for detecting uncertain parameters of chaossystem with random noises q
Fei Gao a,b,⇑, Yibo Qi a, Ilangko Balasingham b, Qiang Yin a, Hongrui Gao a
a Department of Mathematics, School of Science, Wuhan University of Technology, Luoshi Road 122, Wuhan, Hubei 430070, People’s Republic of Chinab Signal Processing Group, Department of Electronics and Telecommunications, Norwegian University of Science and Technology, N-7491 Trondheim, Norway
a r t i c l e i n f o
Keywords:Chaos systemRandom noisesTime-delayParameters identificationDifferential evolution algorithm
0957-4174/$ - see front matter � 2011 Elsevier Ltd. Adoi:10.1016/j.eswa.2011.08.076
q The work was carried out during the tenureBensoussan’’ Fellowship Programme. This ProgrammCurie Co-funding of Regional, National and Internationthe European Commission. The work is also supporteResearch Foundation for Returned Scholars, MinistrNSFC Project Nos. 10647141, 60773210 of China, theNo. 2009CBD213 of Hubei Province of China, the Funthe Central Universities of China, the Self-determinfunds of WUT No. 2010-Ia-004, The National Soft2009GXS1D012 of China, the National Science FScientists of China No. 20080431004.⇑ Corresponding author at: Department of Math
Wuhan University of Technology, Luoshi Road 122, WRepublic of China. Tel.: +86 027 87651213.
E-mail addresses: [email protected] (F. Gao), [email protected] (I. Balasingham),[email protected] (H. Gao).
URL: http://feigao.weebly.com (F. Gao).
a b s t r a c t
The paper is concerned with the uncertain parameters and time-delays of chaos system with randomnoises. A scheme based on differential evolution algorithm (DE) is newly introduced to solve the problemvia a nonnegative multi-modal nonlinear optimization, which finds a best combination of parameters andtime-delays such that an objective function is minimized. The illustrative examples, in both systems freeof time-delays and time-delays systems with random noises, are given to demonstrate the validity of theproposed method.
� 2011 Elsevier Ltd. All rights reserved.
1. Introduction
Differential evolution (DE) algorithm is a relatively new compu-tational intelligence tool relation to evolutionary computation,capable of handling non-differentiable, nonlinear and multi-modalobjective functions, with few, easily chosen, control parameters(Price, Storn, & Lampinen, 2005; Storn, 1996; Storn & Price,1996). DE turned out to be the best genetic type of algorithm forsolving the real-valued test function suite of the 1st internationalconference on evolutionary computation (Storn, 1996).
Great interests emerged in time-delay chaotic systems (Chen,Chen, & Gu, 2007; Hua & Guan, 2003; Li, Liao, & Zhang, 2005; Mas-oller, 2001; Park & Kwon, 2005; Pyragas, 1992; Sun, 2004; Ting,2007), since the first chaos in time-delay system was discoveredby Mackay and Glass (Mackey & Glass, 1977). And the time-delaychaotic system possesses additional interesting property as well
ll rights reserved.
of an The ERCIM ‘‘Alaine is supported by the Marieal Programmes (COFUND) ofd by Supported by Scientific
y of Education of China, theNatural Science Foundation
damental Research Funds fored and Innovative Research
Science Research Programoundation for Post-doctoral
ematics, School of Science,uhan, Hubei 430070, People’s
[email protected] (Y. Qi),[email protected] (Q. Yin),
as the properties of chaotic system without time-delay. In thethese studies, the precise time-delay values of the chaotic systemare often assumed to be fully or partially known. However, in realstates, the parameters and delay time of chaotic system cannot beexactly known. Therefore, it is necessary to identify parametersand delay time of time-delay chaotic systems. And unfortunately,it is difficult to obtain the exact values of the time delays and theparameters for practical chaotic systems.
Although some methods robust to noises have been proposed toestimate the unknown parameters of chaos systems free of time-delays, such as synchronization-based methods (Huang, Wang, &Feng, 2005; Lu & Cao, 2007; Parlitz, 1996; Rakshit, Chowdhury, &Saha, 2007; Shen & Wang, 2008), adaptive control method (Chen& Lü, 2002) and evolutionary algorithm (Chang, 2007; Chang, Yang,Liao, & Yan, 2008; Gao, Li, & Tong, 2008; Gao, Gao, Li, Tong, & Lee,2009; Gao & Tong, 2006; Guan, Peng, Li, & Wang, 2001; Ho, Chou, &Guo, in press; Li, Yang, Peng, & Wang, 2006), the nonlinear estima-tor (Peng, Li, Yang, & Zhang, in press) the researches on estimationof time-delays are still not taken into account or taken as knownbeforehand, or there are too much assumptions on the chaoticsystems.
Recently, Tang put a novel method using Particle swarm intelli-gence (PSO) (Tang & Guan, in press), a chaotic ant swarm method(Tang, Cui, Li, Peng, & Guan, in press), a differential evolution ap-proach (Tang & Guan, 2009) to estimate time-delay and parame-ters for time-delay chaotic systems without considering thenoises. However, to the best of authors’ knowledge, little research(Gao, Lee, Li, Tong, & Xiaohong, 2009) has been done to identify un-known time-delays and parameters of chaotic systems with ran-dom noises.
In this paper, a simple but effective scheme based on DE isintroduced identify the unknown parameters and time-delays of

0 50 100 150 200 250 30010
−2
100
102
104
106
No. of iterations
Best FAvg. F
0 50 100 150 200 250 300−2
−1
0
1
2
3
4
5
No. of iterations
θ1−10
θ2−28
θ3−8/3
(b)(a)
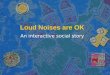
Fig. 1. Simulation for Lorénz system (7).
0 50 100 150 200 250 30010
−2
100
102
104
106
No. of iterations
Best FAvg F
0 50 100 150 200 250 300−4
−3
−2
−1
0
1
2
No. of iterations
θ1−35
θ2−3
θ3−28
(b)(a)
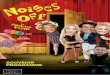
Fig. 2. Simulation for Chen system (12).
0 50 100 150 200 250 30010
0
105
No. of iterations
Best FAvg. F
0 50 100 150 200 250 300−3
−2
−1
0
1
2
3
4
No. of iterations
1−36
θ2−3
θ3−20
(b)(a)
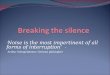
Fig. 3. Simulation for Lü system (13).
1780 F. Gao et al. / Expert Systems with Applications 39 (2012) 1779–1783
nonlinear chaotic systems with random initial noises. The paper isorganized as follows. Section 2 provides a brief review for DE. In
Section 3, a proper mathematics model is introduced to trans-fer the estimation problems into a multi-modal nonnegative

0 50 100 150 200 250 30010
−4
10−2
100
102
No. of iterations
Best FAvg. F
0 50 100 150 200 250 300
−1
0
1
2
3
No. of iterations
α−0.1β−0.2τ−17
(b) (a)
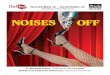
Fig. 4. Simulation for Mackey–Glass system (11).
0 50 100 150 200 250 30010
−6
10−4
10−2
100
102
No. of iterations
Best FAvg. F
0 50 100 150 200 250 300−4
−3
−2
−1
0
1
2
No. of iterations
λ−26γ−104τ−0.5
(b) (a)
Fig. 5. Simulation for logistic system (14).
Table 1Comparisons for results of F for systems above.
system Mean StD Min Max Success rate (%)
Lorénz 1.9022 1.1168 0.1613 5.7000 99Chen 14.919 9.4295 0.3069 50.720 98Lü 4.4571 2.5993 1.3111 15.245 98M–G 6.6353e-
33.4628e-3
9.9645e-4
1.7817e-2
100
Logistic 2.6934e-4
1.7086e-4
2.3835e-5
8.5393e-4
100
F. Gao et al. / Expert Systems with Applications 39 (2012) 1779–1783 1781
function’s optimization. Section 4 includes five typical simulationexamples to illuminate the effectiveness of results obtained. Con-clusions are summarized briefly in Section 5.
2. The main idea of differential evolution algorithm
DE grew out of Price’s attempts to solve the Chebychev polyno-mial fitting problem that had been posed to him by Storn (1996),Storn and Price (1996) and Price et al. (2005). It utilizes Mn-dimen-sional individuals, {xi = (xi1, . . . ,xin) 2 S, (i = 1, . . . ,M)} as a populationat each iteration, called a generation.
At each generation, three operators, named mutation and cross-over (recombination) and replacement, are applied on each indi-vidual to generate the new population (Price et al., 2005; Storn &Price, 1996). Define a fitness function f(x) to value the populationand label the best individual in current population as Q. For eachparticle xi, (i = 1, . . . ,M), the main procedure is given as following:
Step-1. Mutation. Let mutation constant CF = 0.85, 4 mutuallydifferent individuals xa, xb, xc, xd – xi in the current pop-ulation are chosen randomly to generate a new individ-ual ni = (ni1, . . . ,ni n) as below, called strategy ’’DE/rand/2’’(Storn, 1996; Storn & Price, 1996)
ni ¼ Q þ CF � ðxa � xbÞ þ CF � ðxc � xdÞ: ð1Þ
Step-2. Crossover. Let crossover constant CR = 1, a new testingindividual Ui = (ui1, . . . ,ui n) is created by ni:
� uij ¼nij; if ðrandbðjÞ < CRÞjðj ¼ rnbrðiÞÞ;xij; if ðrandbðjÞP CRÞ&ðj – rnbrðiÞÞ;
ð2Þ
where rnbr(i) is a random integer in {1,2, . . . ,n}, randb(j)is the jth random real in [0,1], j = 1, . . . ,n.
Step-3. Replacement. Remain the better one between xi and Ui
as a member of the population in the next generation:
� xi ¼Ui; if f ðUiÞ < f ðxiÞ;xi; ; if f ðUiÞP f ðxiÞ:
ð3Þ

1782 F. Gao et al. / Expert Systems with Applications 39 (2012) 1779–1783
When all the individuals {xi, (i = 1,2, . . . ,M)} finished the 3 opera-tions above, DE remains the better between Q and current bestindividual Q0 as the new best individual Q. Then DE goes into nextgeneration until the termination condition is satisfied.
3. Mathematics models
Generally, chaotic systems are described by a set of nonlineardifferential equations. In this work, we consider two kinds of chaossystems with random noises.
3.1. Mathematics model for chaos system free of time-delays
Consider the following time-delay chaos system
_xðtÞ ¼ f ðxðtÞ; x0;HÞ; ð4Þ
where xðtÞ ¼ ðx1ðtÞ; . . . ; xnðtÞÞ0 2 Rn is the state vector, x0 = (x10, . . . ,xn0)0 +rand is the initial state vector with random noises, H =(h1, . . . ,hd)0 is the systematic parameters. The parameter H is to beestimated.
Suppose the structure of system (4) is known, then the esti-mated system can be written as
_~xðtÞ ¼ f ð~xðtÞ; x0; eHÞ; ð5Þ
where _~xðtÞ ¼ ð _~x1ðtÞ; . . . ; _~xnðtÞÞ0 2 Rn is the state vector of system (5),eH ¼ ð~h1; . . . ; ~hdÞ0 is the systematic parameters to be estimated.Let L = (x1, . . . ,xm) and eL ¼ ð~x1; . . . ; ~xmÞ, where m denotes the
length of sampling time points used for parameter estimation,fxi; ~xiði ¼ 1; . . . ;mÞg denote the state vector of the original system(4) and the estimated system (5) at time i respectively.
Then a novel objective function is chosen as:
F ¼ kL� eLk2; ð6Þ
where eH is the independent variables of function (6).To explain the proposed method, we take the famous Lorénz
system (Lorenz, 1963) for example, the first canonical chaoticattractor found in 1963. Firstly a new system is constructed fromLorénz system:
_x ¼ r � ðy� xÞ;_y ¼ c � x� x � z� y;
_z ¼ x � y� b � z:X ¼ ðx; y; zÞ
8>>><>>>: !
_~x ¼ r � ðy� xÞ;_~y ¼ c � x� x � z� y;
_~z ¼ x � y� ~b � z:eX ¼ ð~x; ~y;~zÞ;
8>>>><>>>>:
ð7Þ
where r, c, b is unknown. When r = 10,c = 28, b = 8/3, system (7) ischaotic. Let eH ¼ ð~r; ~c; ~bÞ 2 ½5;15� � ½23;33� � ½0:1;10�.
Secondly let Lorénz system evolves freely, we choose an initialstate x0 with random noises which follows behind a period of tran-sient process. We use 4-order Runge–Kutta method to resolve sys-tem (7) with h = 0.01 to get a discrete time serials of Lorénzsystem’s standard state at ð~xðtÞ; ~yðtÞ;~zðtÞÞ; t ¼ 0h; h; . . . ;300h.Then the L; eL are obtained.
Thirdly the objective function is chosen as:
Fð eHÞ ¼XT�ht¼0�hkeX � Xk2
: ð8Þ
3.2. Mathematics model for chaos system with time-delays
Consider the following time-delay chaos system
_xðtÞ ¼ f ðxðtÞ; xðt � sÞ; x0;HÞ ð9Þ
where xðtÞ ¼ ðx1ðtÞ; . . . ; xnðtÞÞ0 2 Rn is the state vector, x0 = (x10, . . . ,xn0)0 +rand is the initial state vector, t > s, H = (h1, . . . ,hd)0 is the sys-tematic parameters.
In this paper, the time-delay s is treated as a parameter to beestimated. Suppose the structure of system (9) is known, thenthe estimated system can be written as
_~xðtÞ ¼ f ð~xðtÞ; ~xðt � ~sÞ; x0; eHÞ; ð10Þ
where _~xðtÞ ¼ ð _~x1ðtÞ; . . . ; _~xnðtÞÞ0 2 Rn is the state vector of system(10), ~s and eH ¼ ð~h1; . . . ; ~hdÞ0 is the systematic parameters to beestimated.
Then we solve system (9) and (10) with an initial state x0 withrandom initial noises. And 100 states are used. Then L; eL are ob-tained and the objective function is constructed like Eq. (6).
To show the process, we take classical time-delay Mackey–Glass chaotic system
_xðtÞ ¼ �a � xðtÞ þ b � xðt � sÞ1þ xðt � sÞ10 ; ð11Þ
when s = 17, a = 0.1, b = 0.2, system (11) is chaotic.Let eH ¼ ð~s; ~a; ~bÞ 2 ½12;20� � ½0:05;1� � ½0:05;1�. DDE23 solver
(Shampine & Thompson, 2001) in Matlab7 is chosen to solve sys-tem (11) with h = 0.01, an initial state x0 with random noise in[�0.1,0.1]3 which follows behind a period of transient process.And 100 states are used. Then we can get the L; eL, and the objectivefunction are obtained.
4. Simulations
In this section, firstly the pseudocode of the proposed scheme isgiven. Secondly, simulations are done to identify the parameters offour benchmark chaos systems with the new method. And all thesimulations are done 100 times respectively.
4.1. The novel parameter identification method
The procedure of the new method is outlined in the followingpseudocode Algorithm 1:
Algorithm 1 Parameter identification for time-delay chaossystem with DE
1: Initialize Parameters for DE and chaos system;
2: Generate initial population in the feasible domain of eH;3: repeat4: Evaluation. Compute individual fitness with (6);5: Mutation, crossover, replacement the updated and
current Q 0g;6: until Termination condition for DE is satisfied
4.2. Simulations to chaos systems with random noises
We select three classical chaos systems free of time-delay withrandom noises, and 300 states are used 4-order Runge–Kuttamethod. The first is Lorénz system (7), the second is Chen system(Chen & Dong, 1998)
x0 ¼ h1 � ðy� xÞ;y0 ¼ ðh3 � h1Þ � x� x � z� h3 � y;
z0 ¼ x � y� h2 � z;
8><>: ð12Þ
when h1 = 35, h2 = 3, h3 = 28. Let eH ¼ ð~h1; ~h2; ~h3Þ 2 ½30;40��½0:1;10� � ½23;33�
The third is Lü system (Lü, Chen, & Zhang, 2002)

F. Gao et al. / Expert Systems with Applications 39 (2012) 1779–1783 1783
x0 ¼ h1 � ðy� xÞ;y0 ¼ h3 � y� x � z;
z0 ¼ x � y� h2 � z
8><>: ð13Þ
it has a chaotic attractor when h1 = 36, h2 = 3, h3 = 20. LeteH ¼ ð~h1; ~h2; ~h3Þ 2 ½30;40� � ½0:1;10� � ½15;25�.We choose two classical time-delay chaos system, and 100
states are used in DDE23. The first is time-delay Mackey–Glasschaotic system (11), the second is time-delay Logistic chaotic sys-tem as following:
_xðtÞ ¼ �kxðtÞ þ cxðt � sÞð1� xðt � sÞÞ: ð14Þ
when s = 0.5, k = 26, c = 104, system (14) is chaotic (Tang & Guan, inpress). eH ¼ ð~s; ~k; ~cÞ 2 ½0:05;1� � ½20;30� � ½100;110�.
And the systematic parameters, time-delays of chaos systemswith random noises do not take the original values, they only takethe original values in probability.
In simulations, we set generation T = 300, the size of the popu-lation M = 30 for DE algorithm. We add random noises in[�0.1,0.1]3 to the initial point x0 of all these systems. The simula-tions results are shown in Figs. 1–5, Table 1 respectively.
According to Table 1, the DE converges quickly and it is robustfor these noises cases.
According to Table 1, the simulation result for Lorénz system1.9022 is much more better than 2.74 in Ref. (Wang & Huang,2008), where Fð eHÞ in Eq. (8) is set as following Eq. (15), andM = 300 too.
Fð eHÞ ¼ 1M
XT�ht¼0�hkeX � Xk2
: ð15Þ
And the results for the other chaos systems are for the noisescases, while the Ref. (Chang, 2007; Chang et al., 2008; Gao et al.,2008; Gao & Tong, 2006; Guan et al., 2001; Li et al., 2006; Tang& Guan, 2009) only discuss the identification for systems withoutnoises or time-delays.
5. Conclusions
In this paper, identification of the unknown time delays andparameters for chaos system is studied based on Algorithm 1 withDE. Simulation results on time delay Lorénz, Chen, Lü systems andMackey–Glass, Logistic time-delay chaotic systems with randomnoises verify the effectiveness and efficiency of DE.
The aim of this paper is to design a scheme based on DE to iden-tify the unknown parameters and time-delays. Though it is notgood enough, we hope this method will contribute to the applica-tion of chaos control and synchronization. Moreover, it also illus-trated the simplicity and easy implementation of the other kindof evolutionary algorithms to replace DE in the put scheme.
References
Chang, W. D. (2007). Parameter identification of Chen and Lu systems: A differentialevolution approach. Chaos Solitons & Fractals, 32(4), 1469–1476.
Chang, J.-F., Yang, Y.-S., Liao, T.-L., & Yan, J.-J. (2008). Parameter identification ofchaotic systems using evolutionary programming approach. Expert Systems withApplications, 35(4), 2074–2079.
Chen, Y., Chen, X. X., & Gu, S. S. (2007). Lag synchronization of structurallynonequivalent chaotic systems with time delays. Nonlinear Analysis – TheoryMethods & Applications, 66(9), 1929–1937.
Chen, G. R., & Dong, X. N. (1998). From chaos to order: Methodologies, perspectives andapplications. World Scientific Publishing Company.
Chen, S. H., & Lü, J. H. (2002). Parameters identification and synchronization ofchaotic systems based upon adaptive control. Physics Letters A, 299(4), 353–358.
Gao, F., Gao, H., Li, Z., Tong, H., & Lee, J.-J. (2009). Detecting unstable periodic orbitsof nonlinear mappings by a novel quantum-behaved particle swarm
optimization non-Lyapunov way. Chaos, Solitons & Fractals, 42(4), 2450–2463.doi: 10.1016/j.chaos.2009.03.119.
Gao, F., Lee, J.-J., Li, Z., Tong, H., & Xiaohong, L. (2009). Parameter estimation forchaotic system with initial random noises by particle swarm optimization.Chaos, Solitons & Fractals, 42(2), 1286–1291. doi: 10.1016/j.chaos.2009.03.074.
Gao, F., Li, Z. Q., & Tong, H. Q. (2008). Parameters estimation online for Lorenzsystem by a novel quantum-behaved particle swarm optimization. ChinesePhysics B, 17(4), 1196–1201.
Gao, F., & Tong, H. Q. (2006). Parameter estimation for chaotic system based onparticle swarm optimization. Acta Physica Sinica, 55(2), 577–582.
Guan, X. P., Peng, H. P., Li, L. X., & Wang, Y. Q. (2001). Parameters identification andcontrol of Lorenz chaotic system. Acta Physica Sinica, 50(1), 26–29.
Ho, W.-H., Chou, J.-H., & Guo, C.-Y. (in press). Parameter identification of chaoticsystems using improved differential evolution algorithm, Nonlinear Dynamicsdoi:10.1007/s11071-009-9629-2.
Hua, C. C., & Guan, X. P. (2003). Robust control of time-delay chaotic systems.Physics Letters A, 314(1–2), 72–80.
Huang, L., Wang, M., & Feng, R. (2005). Parameters identification and adaptivesynchronization of chaotic systems with unknown parameters. Physics Letters A,342(4), 299–304.
Li, C. D., Liao, X. F., & Zhang, R. (2005). A unified approach for impulsive lagsynchronization of chaotic systems with time delay. Chaos Solitons & Fractals,23(4), 1177–1184.
Li, L. X., Yang, Y. X., Peng, H. P., & Wang, X. D. (2006). Parameters identification ofchaotic systems via chaotic ant swarm. Chaos Solitons & Fractals, 28(5),1204–1211.
Lorenz, E. N. (1963). Deterministic nonperiodic flow. Journal of the AtmosphericSciences, 20(2), 130–141.
Lu, J. Q., & Cao, J. D. (2007). Synchronization-based approach for parametersidentification in delayed chaotic neural networks. Physica A: StatisticalMechanics and its Applications, 382(2), 672–682.
Lü, J. H., Chen, G. R., & Zhang, S. C. (2002). Dynamical analysis of a new chaoticattractor. International Journal of Bifurc Chaos, 12(5), 1001–1015.
Mackey, M. C., & Glass, L. (1977). Oscillation and chaos in physiological controlsystems. Science, 197(4300), 287–289.
Masoller, C. (2001). Anticipation in the synchronization of chaotic time-delaysystems. Physica A – Statistical Mechanics and Its Applications, 295(1–2),301–304.
Park, J. H., & Kwon, O. M. (2005). A novel criterion for delayed feedback control oftime-delay chaotic systems. Chaos Solitons & Fractals, 23(2), 495–501.
Parlitz, U. (1996). Estimating model parameters from time series byautosynchronization. Physical Review Letters, 76(8), 1232.
Peng, H. P., Li, L. X., Yang, Y. X., & Zhang, X. H. (in press). Parameter estimation oftime-delay chaotic system, Chaos Solitons & Fractals. doi:10.1016/j.chaos.2007.09.025.
Price, K. V., Storn, R., & Lampinen, J. A. (2005). Differential evolution: A practicalapproach to global optimization (natural computing series). New York, Inc.:Springer-Verlag.
Pyragas, K. (1992). Continuous control of chaos by self-controlling feedback. PhysicsLetters A, 170(6), 421–428.
Rakshit, B., Chowdhury, A. R., & Saha, P. (2007). Parameter estimation of a delaydynamical system using synchronization in presence of noise. Chaos Solitons &Fractals, 32(4), 1278–1284.
Shampine, L. F., & Thompson, S. (2001). Solving DDEs in MATLAB. Applied NumericalMathematics, 37(4), 441–458.
Shen, L., & Wang, M. (2008). Robust synchronization and parameter identificationon a class of uncertain chaotic systems. Chaos Solitons & Fractals, 38(1),106–111.
Storn, R. (1996). On the usage of differential evolution for function optimization. InM. H. Smith, M. A. Lee, J. Keller, & J. Yen (Eds.), 1996 Biennial conference of thenorth american fuzzy information processing society (NAFIPS 1996) (pp. 519–523).Piscataway, Berkeley, CA, USA: IEEE.
Storn, R., & Price, K. V. (1996). Minimizing the real functions of the ICEC’96 contestby differential evolution. In IEEE International Conference on EvolutionaryComputation ICEC’96 (pp. 842–844). Nagoya, Japan: IEEE Press.
Sun, J. T. (2004). Global synchronization criteria with channel time-delay for chaotictime-delay system. Chaos Solitons & Fractals, 21(4), 967–975.
Tang, Y. G., & Guan, X. P. (in press). Parameter estimation for time-delay chaoticsystem by particle swarm optimization, Chaos Solitons & Fractals. doi:10.1016/j.chaos.2007.09.055.
Tang, Y. G., Cui, M. Y., Li, L. X., Peng, H. P., & Guan, X. P. (in press). Parameteridentification of time-delay chaotic system using chaotic ant swarm, ChaosSolitons & Fractals. doi:10.1016/j.chaos.2008.09.044.
Tang, Y., & Guan, X. (2009). Parameter estimation of chaotic system with time-delay: A differential evolution approach. Chaos, Solitons & Fractals, 42(5),3132–3139. doi: 10.1016/j.chaos.2009.04.045.
Ting, C. S. (2007). An observer-based approach to controlling time-delay chaoticsystems via Takagi–Sugeno fuzzy model. Information Sciences, 177(20),4314–4328.
Wang, J. Y., & Huang, D. X. (2008). Parameter estimation for chaotic systems basedon hybrid differential evolution algorithm. Acta Physica Sinica, 57(5),2755–2760.