-
8/9/2019 A Novel Fault-Tolerant DFIG-Based Wind Energy
1/10
1296 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 29, NO. 3, MAY
2014
A Novel Fault-Tolerant DFIG-Based Wind EnergyConversion System
for Seamless Operation
During Grid FaultsParag Kanjiya, Bharath Babu Ambati, and Vinod
Khadkikar , Member, IEEE
Abstract— A novel fault-tolerant configuration of
doubly fedinduction generator (DFIG) for wind energy conversion
systems
(WECSs) is proposed in this paper for the seamless
operationduring all kinds of grid faults. The proposed
configuration is de-
veloped by replacing the traditional six-switch grid-side
converter(GSC) of DFIG with a nine-switch converter. With the
additionalthree switches, the nine-switch converter can provide six
inde-pendent output terminals. One set of three output terminals
are
connected to the grid through interfacing inductors to
realizenormal GSC operation while, the other set of three output
termi-
nals are connected to neutral side of the stator windings to
providefault ride-through (FRT) capability to the DFIG. An
appropriatecontrol algorithm is developed for the proposed
configurationthat: 1) achieves seamless fault ride-through during
any kind of
grid faults and 2) strictly satisfies new grid codes
requirements.
The effectiveness of the proposed configuration in riding
throughdifferent kind of faults is evaluated through detailed
simulationstudies on a 1.5-MW WECS.
Index Terms— Doubly f ed induction generator
(DFIG), gridfaults, neutral side converter, seamless fault
ride-through (seam-
less FRT), unbalance, wind turbine (WT).
I. I NTRODUCTION
T HE large-scale integration of wind power in today’s power
system is increasing its proposition in total elec-tricity
generated. To improve the reliability of the power systemwith
large-scale wind power integration, different countrieshave
specified fault ride-through (FRT) requirements for windturbine
(WT) in their respective grid codes [1]–[4]. A typicalFRT
requirement curve for WT, as per German and Irish gridcodes, is
shown in Fig. 1. According to Fig. 1(a), WTs must stayconnected
when the terminal voltage remains above the boldline. In addition
to remaining connected to the transmissionsystem, recent grid codes
put stringent requirements on thesupply of reactive current by WTs
as per Fig. 1(b), in order toimprove the voltage security of the
system. The general gridcode requirements can be summarized as
follows.
1) The WTs must stay connected during voltage dips abovethe
specified level for the time duration stated in Fig. 1(a).
Manuscript received May 23, 2013; revised September 12, 2013;
acceptedOctober 11, 2013. Date of publication December 05, 2013;
date of current ver-sion April 16, 2014. Paper no.
TPWRS-00651-2013.
The authors are with the Institute Center for Energy, Masdar
Instituteof Science and Technology, Abu Dhabi, United Arab Emirates
(e-mail: [email protected]; [email protected];
[email protected]).
Color versions of one or more of the figures in this paper
are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TPWRS.2013.2290047
Fig. 1. Recent grid code requirements for grid connected wind
turbines.(a) FRT requirement curve. (b) Reactive support
requirement curve.
2) The WTs must support the grid voltage with additional
re-active current during voltage dips, as per Fig. 1(b). More-over,
the voltage control must take place within 20 ms after the
fault recognition.
3) The active power output of the WTs must be
continuedimmediately after the fault clearance and increased to
theoriginal value with a gradient of at least 20% of the rated
power per second.The doubly fed induction generator (DFIG)
is widely used
for the grid-connected variable-speed WTs because of high
ef-ficiency and independent control of active and reactive
power using partial capacity converters. In the conventional
architec-ture of a DFIG, the stator windings are directly connected
to thegrid and the rotor windings are connected to the grid
through
back-to-back connected voltage-source converters (VSCs)
[5],[6]. These two VSCs can be identified as: 1) rotor-side
con-verter (RSC), connected between the rotor and dc link and
2)grid-side converter (GSC), connected between the grid and dclink
through interfacing inductors. As the stator windings aredirectly
connected to the grid, any amount of voltage dip at
the DFIG terminals resulting from the grid fault directly
affectsthe air-gap flux and, hence, the energy conversion
process. De- pending on the type of fault, the voltage dip may
introduce dccomponent or combination of dc and reverse rotating ac
compo-nent in the air-gap flux [7]. These flux components induces
highvoltage in the rotor windings at rotational and/or double the
ro-tational frequency. The RSC itself cannot limit these
high-fre-quency voltages due the modulation index constraint and
henceloses its current control capabilities. Unless the proper
miti-gating measures are employed, the rotor currents under the
gridfault condition can exceed the transient current rating of
theRSC. Grid faults also cause severe mechanical stress on the
bearings and the gear box of WECS due to torque
pulsation.
0885-8950 © 2013 IEEE. Personal use is permitted, but
republication/redistribution requires IEEE permission.See
http://www.ieee.org/publications_standards/publications/rights/index.html
for more information.
-
8/9/2019 A Novel Fault-Tolerant DFIG-Based Wind Energy
2/10
KANJIYA et al.: NOVEL FAULT-TOLERANT DFIG-BASED
WECSS FOR SEAMLESS OPERATION DURING GRID FAULTS 1297
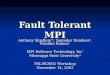
Fig. 2. Proposed fault-tolerant DFIG wind turbine configuration
for seamless FRT.
Many solutions have been proposed to provide or improve theFRT
capability of the DFIG wind turbines. To limit the
transientcurrents, the rotor crowbar that disables the RSC and
short cir-cuit the rotor windings through resistors during the grid
faults is
discussed in [8] and [9]. The main drawback of this scheme
isthat the DFIG consumes huge reactive power during grid faultand
further aggravates the voltage dip. Another configurationthat uses
series dynamic resistors is proposed in [10] and [11].This can
maintain the stator voltage or rotor currents within thelimits but
not appropriate if the DFIG is being controlled tosupply the
reactive power to the grid. Furthermore, above men-tioned fault
ride through techniques fail to maintain the pre-faultvoltage
across the stator windings which causes undesired elec-trical and
mechanical transients in the system.
To obtain transient-free FRT performance, it is necessary tokeep
the pre-fault voltage across the stator windings during thegrid
faults. To achieve this, the dynamic voltage restorer (DVR)
arrangement using an additional VSC with an output
filter and series transformer with bypass switches is
investigated in[12]–[14]. To provide the protection against dead
short circuit atDFIG terminals, the DVR should be rated for 100% of
the fullDFIG rating. Moreover, this technique involves an
operationaldelay of auxiliary semiconductor switches (used to
bypassthe series transformer during normal condition) and hence
theelectrical transients are unavoidable. Furthermore, this
solutionis very costly as it involves many auxiliary components.
Alter-nately, the use of parallel grid side rectifier and series
inverter atthe Y-point of the stator windings is proposed and
investigatedduring balanced faults in [15]. This scheme effectively
reducesthe number of passive and active components used to
achievefault-tolerant operation of DFIG. However, the major
drawback of this scheme is that the stator windings need to
carry the slip
power during super-synchronous speeds and inability to
ridethrough unbalanced faults.
With the aim of achieving seamless FRT operation in linewith
recent grid codes using minimum additional components,
a novel fault-tolerant confi
guration of DFIG using a nine-switchconverter is proposed in
this paper. In the proposed configura-tion, a traditional
six-switch GSC of DFIG is replaced with a re-cently proposed
nine-switch converter [16]–[18] to provide twoindependent
three-phase outputs. One of these three-phase out-
puts is connected to grid via an interfacing inductor to
realizenormal GSC operation, while the second output is connectedto
the neutral side of the stator windings to offer series
voltagecompensation capability to DFIG for riding through any
kindof grid faults. An appropriate control algorithm for the
controlof a nine-switch converter is developed to achieve the
seamlessFRT operation of DFIG. Moreover, to provide reactive
currentsupport in line with recent grid code requirements during
the
grid fault conditions, a coordinated reactive power controller
isdeveloped to share reactive current between GSC and RSC. Itis
worth noting that the proposed fault-tolerant DFIG configu-ration
uses only three extra switches to achieve transient-freeoperation
during any kind of grid fault.
II. PROPOSED DFIG CONFIGURATION AND MODELING
A. System Description
The schematic of the proposed fault-tolerant DFIG WT
con-figuration to achieve seamless FRT operation is shown in Fig.
2.Similar to a conventional DFIG, the stator windings are di-rectly
connected to grid and the rotor windings are connectedto the RSC
(switches R1–R6) through slip rings. The RSC inthe proposed
configuration shares the dc link capacitor (C) with
-
8/9/2019 A Novel Fault-Tolerant DFIG-Based Wind Energy
3/10
1298 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 29, NO. 3, MAY
2014
the dual-output nine-switch converter (switches G1–G9) insteadof
conventional six-switch converter. The upper output of
thenine-switch converter is connected to grid via interfacing
in-ductor while, the lower output is connected to the neutralside
of the stator windings of theDFIG. During the normal oper-ation of
the DFIG the lower three switches (G3, G6, and G9) of the nine
switch converter are short circuited to form the Y-point
of thestator windingswhile, theupper six switches (G1, G2,
G4,G5, G7, and G8) are controlled as a conventional GSC to
reg-ulate the dc-link voltage. During the voltage dip resulting
fromthe grid faults, the lower three switches (G3, G6, and G9)
alsostart switching to generate the compensating voltages on
theneutral side of the stator winding to maintain pre-fault
voltageacross it. This operation of generating the compensating
volt-ages on the neutral side of the stator winding is termed here
asneutral side converter (NSC) operation. During grid faults
the
NSC will absorb part of the active power generated by
DFIGand pumps it to the dc link, hence, dc-link voltage tends to
riseif any preventive measures are not taken. To protect the
dc-link
capacitor from over voltage during the grid faults, a
dynamic braking resistor (DBR) is connected across the dc-link
capac-itor as shown in Fig. 2.
B. Modeling of the DFIG
To analyze the transient and steady-state performance of
thewound rotor induction machine with the six-terminal stator, it
ismodeled in d-q reference frame rotating at synchronous
speedfollowing the procedure given in [20]. The voltage and
fluxequations of the induction machine with the six-terminal
stator in d-q reference frame can be written as follows:
(1)
(2)
where suf fix and represents the -axis and -axis
compo-nents of respective variables, and represent the
voltagesavailable at the grid side of the stator terminals,
andrepresent the voltages available at the neutral side of the
stator terminals, and and represent the rotor terminal
voltages.The variables and represent the stator currents, while
and represent the rotor currents. and representthe stator and
rotor resistances referred to stator while , ,and represent the
stator self-inductance, rotor self-induc-tance, and mutual
inductances referred to stator, respectively.is supply angular
frequency while is the rotor angular fre-quency in electrical
radians per second.
By aligning the -axis of the reference frame to the air-gapflux,
the simplified expressions for the electromagnetic torque
developed and stator reactive power in terms of rotor
variablescan be written as
(3)
(4)
From (3) and (4), it can be seen that, by aligning the -axisof
the reference frame to the air-gap flux, the
electromagnetictorque developed is directly proportional to the
-axis rotor cur-rent while the stator reactive power is directly
proportional tothe -axis rotor current. Hence, by employing the
decoupledcontrol of and , the electromagnetic torque
(or active
power) and the stator reactive power can be controlled
indepen-dently by RSC.
III. CONTROL OF THE DFIG WIND TURBINE
The control of the RSC and nine-switch converter (GSC
and NSC) in the proposed DFIG configuration has two modes
of
operation: 1) normal mode and 2) fault mode. The details of
thecontrol strategies for both the converters during these modes
of operation are discussed here.
A. Normal Mode Operation
In normal mode of operation,the DFIG is controlled to
supplymaximum available active power by the WT and
user-definedreactive power.
1) Rotor-Side Converter Control During Normal Mode:
Tocontrol the electromagnetic torque and the reactive power
pro-duced by DFIG independently, in normal mode of operationRSC is
controlled in a synchronously rotating d-q referenceframe with
d-axis aligned to stator flux vector. The
expressions
for the electromagnetic torque and reactive power
developed by DFIG with d-axis oriented to stator
flux are given in (3)and (4), respectively. The electromagnetic
torque and hence ac-tive power produced by DFIG is proportional to
and can
be regulated by controlling . On the other hand,
reactive power produced by DFIG is proportional to and can
beregulated by controlling . The detailed control diagram
of RSC is shown in Fig. 3. The reference -axis rotor currentis
calculated from the reference torque command gener-ated using a PI
controller over the rotor speed. The referencerotor speed command
can be generated using an appropriatemaximum power point (MPPT)
algorithm. The reference -axisrotor current is generated using a PI
controller over reac-tive power supplied by the DFIG. In the normal
mode of oper-ation, is allowed to take any value within the limits
in order to extract the maximum power from WT while is limited
as
per
(5)
to ensure RSC current is within the safe limit .The reference
rotor currents and are tracked using de-
coupled PI current control by regulating and as per (2).The gate
signals (R1 to R6) for RSC are then issued by com-
paring the reference RSC voltage with a triangular
car-rier wave using a sinusoidal PWM technique.
2) Nine-Switch Converter Control During Normal Mode:
The control of a nine-switch converter consists of two
parts:
-
8/9/2019 A Novel Fault-Tolerant DFIG-Based Wind Energy
4/10
KANJIYA et al.: NOVEL FAULT-TOLERANT DFIG-BASED
WECSS FOR SEAMLESS OPERATION DURING GRID FAULTS 1299
Fig. 3. RSC control.
Fig. 4. Nine-switch converter control.
1) GSC control and 2) NSC control. The detailed schematic
of nine-switch converter control is shown in Fig. 4.
The objective of the GSC is to regulate the dc-link voltageto
its reference value irrespective of direction of rotor
power flow. The voltage balance equation across interfacing
inductor
with internal resistance in synchronous reference framecan be
written as
(6)
By aligning the -axis of the reference frame of the GSC con-trol
with the grid voltage, active and reactive power supplied
or absorbed by the GSC can be written as
(7)
The active power and hence the dc-link voltage is propor-tional
to , and can be regulated by controlling while,the reactive power
is proportional to and can be regulated
-
8/9/2019 A Novel Fault-Tolerant DFIG-Based Wind Energy
5/10
1300 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 29, NO. 3, MAY
2014
by controlling . In normal mode of operation, the
refer-ence -axis GSC current is generated using PI
controller over average dc-link voltage and the reference
-axis GSC cur-rent is set equal to zero. The reference voltage
thathas to be generated by GSC in order to control GSC current
toits reference value is computed by employing decoupled
currentcontrol as per (6).
In normal steady state operation, the voltage to be
injected by NSC at neutral side of the stator winding is zero.
Hence, inthe normal mode of operation, the NSC controller is
inactiveand the reference voltage to be generated by the NSC iskept
equal to zero.
Both the GSC and NSC operation has to be carried out bya single
nine-switch converter in the proposed fault-tolerantDFIG
configuration. Like most reduced component
converter topologies, the nine-switch converter faces
limitations imposedon its allowable switching states. Both of the
output terminalsof the same phase in the nine-switch converter can
only connectto either [for phase-a: -ON, -ON, and -OFF] or
0 V [for phase-a: -OFF, -ON, and -ON], or its upper output
terminal to and lower output terminal to 0 V
[for phase-a: -ON, -OFF, and -ON]. The combinationwhere
the upper output terminal needs to be connected to 0 Vand lower to
is not allowed [for phase-a: -ON, -ON,and -ON] as this
short-circuits the dc link. To resolve thislimitation, two
modulating references of the same phase shouldshare the modulation
space without intersecting each other [16]. This can be
achieved by placing the reference for upper terminal always
above that of the lower terminal by addingoffsets to both the
references. The adjustment of three-phasemodulating reference
signals in modulation space by addingthe same offset to all the
three phases does not show any impact
on the output (line voltages) of the converter (for
example,third-harmonic injection PWM method) [19]. The
modulatingreference signal adjustment method for nine-switch
converter
based on 120 -discontinuous modulation [19] is derived
in[18]. The offset reference voltage signals for GSC and NSC as
per [18] can be written as
(8)
The offset reference signals and are fed to theindividual
three-phase PWM generators (PWM-I and PWM-II)
which generate the two different sets of six PWM signals. If
theGSC and NSC operations are to be achieved using two sepa-rate
six-switch inverters, the PWM signals generated by PWM-Iand PWM-II
can be directly given to corresponding inverters.However, in a
nine-switch inverter, the middle three switchesare shared by GSC
and NSC, so their gate pulses are generated
by logical OŔ operation of PWM signals
corresponding to lower three switches by PWM-I and upper three
switches by PWM-IIas shownin Fig. 4. ThePWM signals corresponding
to the upper three switches by PWM-I and lower three switches
by PWM-IIare directly issued to upper three and lower three
switches, re-spectively, of the nine-switch converter. Additional
informationon the nine-switch inverter operation can be found in
[16]–[18].
It is important to note that during normal mode of operationthe
reference voltages for NSC are zero and hence
offset reference signals are minus one. This meansthat the
PWMsignals for lower three switches of the nine-switchconverter are
always at logic high and corresponding switchesare ON. This
effectively short circuit the stator windings on neu-tral side and
form the Y-point.
B. Fault Mode Operation
During the fault mode of operation, the NSC is controlledto keep
a pre-fault voltage across the stator winding while theRSC and GSC
control is switched to supply reactive current inline with the
requirement of the recent grid codes [Fig. 1(b)]. Toachieve
transient-free operation, it is necessary to detect the gridfault
with least possible delay. The fault in the system can bedetected
almost instantaneously by measuring the absolute error
between reference grid voltage magnitude (1 p.u.) and
actualgrid voltage magnitude (in ) as follows:
(9)
The grid fault is detected whenever exceeds the
threshold (typically 0.1 p.u.). Once the grid fault is
detected,the signal in Fig. 3 and 4 changes its logic from low
tohigh. As will oscillate above and below the thresholdduring the
unsymmetrical faults, the fault removal is detectedwhen the one
cycle average of reduces below thethreshold. The details of the
actions taken by the controller of different converters during
the grid fault condition arediscussed below.
1) RSC Control During Fault Mode: The rotor side
converter has the capability to provide full reactive support
required by therecent grid codes during the grid fault condition
provided thatthe NSC keeps the pre-fault voltage across the stator
winding.
However, if the RSC control is switched to supply full
reactivecurrent, the active current supplied by the stator has to
be re-duced to keep RSC switch currents below the safe limit.
Thisleads to the over speeding of the rotor and, hence,
increasedmechanical stress due to the storage of the energy
produced bythe WT as kinetic energy. To reduce the negative impact
of in-creased mechanical stress on WT’s construction, it is
advisableto maximize active power extraction along with reactive
cur-rent supply without exceeding the rating of any component inthe
system. To achieve this, the reactive currents required to ful-fill
the grid code requirements is shared by the GSC and RSCduring grid
faults in proportion to their ratings. The duty of sup-
plying two third of the reactive current (maximum 0.6
p.u.) is
assigned to stator and hence RSC, while, one third (maximum0.3
p.u.) is assigned to the GSC. To supply the reactive
currentassigned to the stator during fault condition, the is
computedusing the PI controller over reference stator reactive
current( -axis current is proportional to reactive power as the
reference
-axis is oriented to stator flux) as shown in Fig. 3.
The iscalculated using
(10)
to support two thirds of the reactive current required by
gridcode as per Fig. 1(b).
In (10), is the positive sequence grid voltage magnitudeand can
be calculated within 20 ms to fulfill the grid code re-quirement.
In the fault mode of operation, the priority is given
-
8/9/2019 A Novel Fault-Tolerant DFIG-Based Wind Energy
6/10
KANJIYA et al.: NOVEL FAULT-TOLERANT DFIG-BASED
WECSS FOR SEAMLESS OPERATION DURING GRID FAULTS 1301
to to strictly support reactive current and the limit on
iscalculated as
(11)
2) Nine-Switch Converter Control During Fault Mode:
Asdiscussed before, the DBR comes into picture during fault
con-
dition to keep the dc-link voltage below the safe limit
whichcomforts the GSC from the duty of keeping the dc-link
voltageconstant. Therefore, during the grid fault condition to
assist theRSC, the GSC controller is switched to supply one third
of thereactive current required to fulfill the grid codes
requirement.The reference reactive current for the GSC during
faultmode of operation is computed as per
if if
(12)
and the GSC current is limited to by putting limits onactive
current as per
(13)
The objective of the NSC control during fault condition isto
keep the pre-fault voltage across the stator winding for the
proper functioning of the RSC control. The logic high on
thesignal during fault condition activates the NSC
controller
asshown inFig. 4.Thecompensatingvoltage thathas to be
injected by the NSC on the neutral side of the stator windingduring
fault condition can be computed as
(14)
In (14), and are the present grid voltages and the
pre-fault grid voltages computed using pre-fault grid
voltagevector angle . The pre-fault grid voltage vector angleis
obtained by saturating the phase-locked loop (PLL) over thegrid
voltage using signal as shown in Fig. 4. The pre-faultgrid voltages
are computed by holding the samples of twocycle mean value of when
fault is detected.
The compensating voltages can be directly used as thereference
voltages to control NSC in open-loop by convertingthem to
stationary reference frame. The open-loop control canwork
satisfactorily for the NSC due to the absence of outputfilter and
series injection transformer. However, there will beseries voltage
drop across the switches of the NSC which mayaffect the
compensation. To achieve perfect compensation of
the voltage dip, the switching voltage drop is added to
byestimating it using PI controller which maintains the
stator flux
at its pre-fault value as shown in Fig. 4. Thed-q axis
stator flux components in Fig. 4 are estimated using
(1)and (2) while, the pre-fault stator flux components
are obtained
by holding the samples of two cycle mean value of
whenfault is detected.
IV. SIMULATED SYSTEM
AND PERFORMANCE EVALUATION
To verify the effectiveness of the proposed DFIG windturbine
configuration and its control to achieve fault tolerantoperation in
line with the recent grid codes, an extensive simu-lation study is
carried out in MATLAB. The detailed model of DFIG with
six-terminal stator and the power electronics con-verters are
developed using SIMULINK and SimPowerSystems
TABLE ISYSTEM SPECIFICATIONS
tool-boxes. To represent the actual operating conditions, it
isassumed that the DFIG wind turbine is connected to a
mediumvoltage network (120 kV) through a step-up
transformer (575 V-Yg/25 kV ), a transmission line (25 kV–50
km),
and another step-up transformer (25 kV /120 kV-Yg) asshown in
Fig. 2. The wind turbine specifications and machine parameters
used are tabulated in Table I.
The performance of the proposed fault-tolerant DFIG
config-uration is evaluated under LLLG, LLG and LG faults at 120
kV
bus and the corresponding results are shown in Figs. 5–7.
To prove the compatibility of the proposed configuration with
re-cent grid codes for the effective fault ride through, faults
areemulated for the duration of 150 ms (nine cycles of supply).
Allof the results are represented in per unit (p.u.) for a wind
speedof 15 m/s.
The detailed response of the proposed fault-tolerant
DFIGconfiguration during the LLLG fault is shown in Fig. 5. The
system is under steady state before the simulation time of 6 s.A
LLLG fault lasting for 150 ms is applied on 120 kV bus at6 s, which
can be observed from the dip in the grid voltages
from 1 to 0.1 p.u. The moment fault is detected, fault
modeoperation is enabled by a logic high of the signal. Thisenables
the NSC which injects compensating voltage (PWMswitching voltage
switched between on the neutral sideof the stator winding to
maintain pre-fault voltage across it.For better visualization of
NSC functionality in maintaining
pre-fault voltage across the stator winding, in Fig. 5 an
average(over a switching period) compensating voltage is
showninstead of the actual PWM switching voltage. Note that the
av-erage voltage across the stator winding does not experi-ence any
change due to the instantaneous voltage compensa-tion by the NSC
(without any delay as no transfer switches are
-
8/9/2019 A Novel Fault-Tolerant DFIG-Based Wind Energy
7/10
1302 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 29, NO. 3, MAY
2014
Fig. 5. Different system variables to study the behavior of
proposed fault-tolerant DFIG configuration during LLLG fault at
120-kV bus.
involved). The effectiveness of the NSC in keeping
pre-faultvoltage across the stator winding is also evident from the
traceof the stator flux vector Sye as it is
maintained constantthroughout the fault duration.
As discussed in the control section, during the grid fault
con-dition, the RSC control is switched to supply reactive
current
by giving priority to . With priority to , the reference
cur-rent (responsible for maintaining WT speed and hence ac-tive
power extraction) is limited to (11) with set equal to1.1 p.u.
(with rated rotor current as base current). The evolutionof
variables and during fault mode operation is depictedin Fig. 5. To
track these reference currents, the RSC injects an
average rotor voltage, across the rotor terminals which
forcesthe rotor current, to flow in rotor winding and
correspondingstator current, in stator winding. Note that the
sinusoidalstator current is achieved with permissible switching
rip-
ples even though the voltage injected by NSC on the
neutral sideof the stator winding is the PWM switching voltage. The
suf fi-ciently high stator self-inductance served the purpose
of filter inductance. This shows that there is no
need of an output filter with NSC similar to RSC.
The GSC also switched to reactive current control modeduring
fault condition (Fig. 4). The resulted GSC current dueto this
control switch over is depicted in Fig. 5 as . Theinjection of the
reactive current assigned to GSC as per (12)can be noticed from the
phase jump and increase in magnitudeof GSC current.
To illustrate the effectiveness of reactive
currentcontrolmode precisely, the active and reactive
components of thestator and GSC currents during LLLG fault are
presented inFig. 5. As the positive sequence grid voltage falls to
0.1 p.u.(well below 0.5 p.u.) during the fault condition, the DFIG
in-
jects a total of 0.9 p.u. reactive current as per Fig.
1(b). Note that this total reactive current is shared by
stator and GSCin 2:1 ratio. Also note that, due to the increase in
stator andGSC reactive currents, corresponding active currents
arereduced for the safe operation of the converters.
To better understand the functionality of different
converters,the active and reactive powers absorbed by the different
com-
ponents of the DFIG system are also plotted in Fig. 5.
Wherein, positive sign indicates power absorption while
negative sign in-dicates power generation. From the active power
plot, it can benoticed that during steady state (before 6 s) the
active power ab-sorbed by the grid is equal to active power
generated bythe stator plus GSC . Note that the active power
pro-duced by the rotor is exactly equal to as the objectiveof the
GSC is to transfer into the grid via a dc link duringthe normal
mode of operation. The power absorbed by the NSCcan be observed to
be zero during steady state as the NSC is notactive in normal mode
of operation. Whereas during the gridfault, as discussed in the
control section, with the reduction in
active component of stator and rotor currents to accommodatethe
necessary reactive current, a little dip in the and can
-
8/9/2019 A Novel Fault-Tolerant DFIG-Based Wind Energy
8/10
KANJIYA et al.: NOVEL FAULT-TOLERANT DFIG-BASED
WECSS FOR SEAMLESS OPERATION DURING GRID FAULTS 1303
Fig. 6. Important system variables to study the behavior of
proposed fault-tolerant DFIG configuration during LL fault at
120-kV bus.
Fig. 7. Important system variables to study the behavior of
proposed fault-tolerant DFIG configuration during LG fault at
120-kV bus.
be observed although the stator voltage is maintained at
its pre-fault value by the NSC. The active power injected into
thegrid by the GSC is zero as the GSC is injecting reactivecurrent
up to its limit during the grid fault. With the reduction in
grid voltage during grid fault, there is a proportionate
reductionin the active power delivered to the grid . Therefore,
thereis a net amount of excess stator active power equal to
deference
between absolute values of and . This excess power is
ab-sorbed by the NSC and dissipated in the DBR at dc link.The
active power produced by the rotor is also dissipatedin the DBR as
the power absorbed by the GSC from thedc link is zero. A similar
analysis can also be drawn for the re-active power of different
components from the plot of reactive
powers.Because of the reduction in active power of the
stator to ac-
commodate the required reactive current component during
gridfault,alittleriseinrotorspeed(w)canbeobservedduetotheac-cumulation
of kinetic energy. Moreover, there is a net amount of excess
power pumped into the dc link by NSC and RSC during
fault condition; the DBR comes into the picture to prevent thedc
link from overvoltage (not more than 1250 V). As soon asfault is
removed from the system, the active current of thestator again
increases within 20 ms to feed the full active power
produced by the WT which effectively fulfi
lls the recent gridcode requirements.The performance of proposed
fault-tolerant DFIG configu-
ration is also evaluated for the unsymmetrical faults. The
re-sponses of the DFIG during LL and LG faults are shown inFigs. 6
and 7, respectively. It can be seen that the DFIG seam-lessly ride
through both the faults without noticeable transients.It can also
be noticed that the currents injected by the DFIG tothe grid are
balanced although the faults are unsymmetrical innature. Moreover,
the DFIG effectively injects the reactive cur-rent corresponding to
positive sequence grid voltage accordingto Fig. 1(b).
After evaluating the performance of proposed fault-tolerantDFIG
during different fault conditions, the superiorities and
benefits associated with it are summarized here.
-
8/9/2019 A Novel Fault-Tolerant DFIG-Based Wind Energy
9/10
1304 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 29, NO. 3, MAY
2014
• The proposed DFIG configuration can effectively keep
the pre-fault voltage across the stator winding of the
DFIGduring any type of fault condition to achieve
transient-freeFRT.
• It is an economic solution to achieve series voltage
com- pensation as only three full-rated extra switches are
usedin the proposed solution compared with the DVR solution
where a full-rated six-switch converter is required.• With the
proposed reactive current sharingcontrol, thepro-
posed fault-tolerant DFIG is able to fulfill all of the
require-ments of the recent grid codes.
• In the proposed DFIG configuration, as the compensationof grid
voltage variations is achieved from the neutral sideof the stator
winding, there is no need for a full-rated seriesinjection
transformer as in case of the DVR solution.
• There isno needfor anoutput filter for the injected voltagesas
the stator self-inductance will be suf ficiently high.
• The proposed fault-tolerantDFIGseamlessly rides throughany
kind of grid fault as it does not involve any transfer switch
(required to short circuit series injection trans-former during
steady-state operation in the case of DVR solution) operation
during FRT.
V. CONCLUSION
A novel fault-tolerant DFIG configuration with minimumadditional
components (only three extra switches) is proposedfor seamless
operation during grid faults. Furthermore, thedetailed
control strategies for the RSC and nine-switch con-verters during
steady-state and fault conditions are developed tofulfill recent
grid codes requirements. The effectiveness of the
proposed fault-tolerant DFIG in riding through different
types
of grid faults (LLLG, LL and LG) is evaluated through
detaileddigital simulation studies. The simulation studies show
that the
proposed fault-tolerant DFIG seamlessly rides through all
of the faults while fulfilling grid codes requirements. The
advan-tages and benefits associated with the proposed
configurationover other FRT techniques can be summarized as
seamlessFRT, strict satisfaction of grid code requirements,
economicalsolution with only three additional switches, no
need of outputfilter, series injection transformer, and its bypass
switches.
R EFERENCES
[1] W. Christiansen and D. R. Johnsen, “Analysis of requirements
in se-lected grid codes, section of electric power engineering,”
Tech. Univ.of Denmark, 2006, Tech. Rep..
[2] M. Tsili and S. Papathanassiou, “A review of grid code
technical re-quirements for wind farms,” IET Renew. Power
Gener., vol. 3, no. 3, pp. 308–332, Mar. 2009.
[3] E.ON Netz GmbH., Bayreuth, Germany, “Grid code—High and
extrahigh voltage,” Apr. 2006.
[4] EirGrid Grid Code. ver. 3.5, EirGrid plc, Ireland, Mar.
2011.[5] R. Pena, J. Clare, and G. Asher, “Doubly fed induction
generator using
back-to-back converters and its application to
variable-speed wind-en-ergy generation,” Proc. Inst. Electr.
Eng.—Elect. Power Appl., vol.143, no. 3, pp. 231–241, May 1996.
[6] S. Muller, M. Deicke, and R. W. De Doncker, “Doubly fed
inductiongenerator systems for wind turbine,” IEEE Ind. Appl.
Mag., vol. 8, no.3, pp. 26–33, May–Jun. 2002.
[7] J. Lopez, P. Sanchis, X. Roboam, and L. Marroyo, “Dynamic
behavior of the doubly fed induction generator during
three-phase voltage dips,”
IEEE Trans. Energy Conver s., vol. 22, no. 3, pp. 709–717,
Sep. 2007.
[8] S.Seman, J. Niiranen, and A. Arkkio,“Ride-throughanalysis of
doublyfed induction wind-power generator under unsymmetrical
network dis-turbance,” IEEE Trans. Power Syst., vol. 21, no.
4, pp. 1782–1789, Nov. 2006.
[9] J. Morren and S. W. H. de Haan, “Ride through of wind
turbines withdoubly-fed induction generator during a voltage
dip,” IEEE Trans. En-ergy Convers., vol. 20, no. 2, pp.
435–441, Jun. 2005.
[10] A. Causebrook, D. J. Atkinson, and A. G. Jack, “Fault
ride-through of large wind farms using series dynamic braking
resistors,” IEEE Trans.
Power Syst., vol. 22, no. 3, pp. 966–975, Aug. 2007.[11]
J. Yang, J. E. Fletcher, and J. O’Reilly, “A
series-dynamic-resistor- based converter protection scheme for
doubly-fed induction generator during various fault
conditions,” IEEE Trans. Energy Convers., vol.25, no. 2, pp.
422–432, Jun. 2010.
[12] A. O. Ibrahim, T. H. Nguyen, D.-C. Lee, and S.-C. Kim, “A
faultridethrough technique of DFIG wind turbine systems using
dynamicvoltage restorers,” IEEE Trans. Energy Convers., vol.
12, no. 3, pp.871–882, Sep. 2011.
[13] C. Wessels, F. Gebhardt, and F. W. Fuchs, “Fault
ride-through of aDFIG wind turbine using a dynamic voltage restorer
during symmet-rical and asymmetrical grid faults,” IEEE Trans.
Power Electron., vol.26, no. 3, pp. 807–815, Mar. 2011.
[14] D. Ramirez, S. Martinez, C. A. Platero, F. Blazquez, and R.
M. deCastro, “Low-voltage ride-through capability for wind
generators based on dynamic voltage restorers,” IEEE
Trans. Energy Convers.,vol. 26, no. 1, pp. 195–203, Mar. 2011.
[15] P. Flannery and G. Venkataramanan, “A fault tolerant doubly
fed in-duction generator wind turbine using a parallel grid-side
rectifier andseries grid-side converter,” IEEE Trans. Power
Electron., vol. 23, no.3, pp. 1126–1135, May 2008.
[16] C. Liu, B. Wu, N. R. Zargari, D. Xu, and J. Wang, “A novel
three- phase three-leg ac/ac converter using nine
IGBTs,” IEEE Trans. Power Electron., vol. 24, no.
5, pp. 1151–1160, May 2009.
[17] T. Kominami and Y. Fujimoto, “Inverter with reduced
switching-de-vice count for independent ac motor control,” in
Proc. IEEE-IECON ,2007, pp. 1559–1564.
[18] L. Zhang, P. C. Loh, and F. Gao, “An integrated nine-switch
power conditioner for power quality enhancement and voltage
sag mitiga-tion,” IEEE Trans. Power
Electron.,vol.27,no.3,pp.1177–1190,Mar.2011.
[19] A. M. Hava, R. Kerkman, and T. A. Lipo, “Carrier-based
PWM-VSIovermodulation strategies: Analysis, comparison, design,”
IEEE Trans. Power Electron., vol. 13, no. 4, pp.
674–689, Jul. 1998.
[20] P. C. Krause, O. Wasynczuk, and S. D. Sudhoff ,
Analysis of Elec-tric Machines and Drive Systems, 2nd ed. New York,
NY, USA:Wiley–IEEE, 2002.
Parag Kanjiya received the B.Eng. degree in elec-trical
engineering from the B.V.M. Engineering Col-lege, Sardar Patel
University, V.V. Nagar, India, in2009, and the M.Tech. degree in
power systems fromthe Indian Institute of Technology Delhi (IITD),
NewDelhi, India, in 2011.
Since October 2011, he has been a ResearchEngineer with the
Masdar Institute of Science andTechnology, Abu Dhabi, United Arab
Emirates.His research interests include applications of
power electronics in distribution systems, power quality
enhancement, renewable energy, FACTS, and power system
optimization.Mr. Kanjiya was the recipient of the K.S. Prakasa Rao
Memorial Award for
getting the highest C.G.P.A at IITD in August 2011.
Bharath Babu Ambati received the B.E. degreein electrical
and electronics engineering from Sir C. R. Reddy College of
Engineering (af filiatedwith Andhra University), Eluru, India,
in 2009, andthe M.Tech degree in power electronics,
electricalmachines and drives from the Indian Institute
of Technology Delhi (IITD), New Delhi, India, in 2011.He is
currently working toward the Ph.D. degree atMasdar Institute of
Science and Technology, AbuDhabi, United Arab Emirates.
From July 2011 to June 2012, he was withSchneider Electric India
Private Ltd. as a Product Expert of Motion & Drives.His current
research interests include power electronics, electrical
machines,renewable energy generation, and power quality
improvement.
-
8/9/2019 A Novel Fault-Tolerant DFIG-Based Wind Energy
10/10
KANJIYA et al.: NOVEL FAULT-TOLERANT DFIG-BASED
WECSS FOR SEAMLESS OPERATION DURING GRID FAULTS 1305
Vinod Khadkikar (S’06–M’09) received the B.E.degree from
the Government College of Engi-neering, Dr. Babasaheb Ambedkar
MarathwadaUniversity, Aurangabad, India, in 2000, the M.Tech.degree
from the Indian Institute of Technology Delhi(IITD), New Delhi,
India, in 2002, and the Ph.D.degree from the École de Technologie
Supérieure(E.T.S.), Montréal, QC, Canada, in 2008, all inelectrical
engineering.
From December 2008 to March 2010, he was aPostdoctoral Fellow
with the University of Western
Ontario, London, ON, Canada. Since April 2010, he has been an
Assistant Pro-fessor with the Masdar Institute of Science and
Technology, Abu Dhabi, UnitedArab Emirates. From April 2010 to
December 2010, he was a Visiting Fac-ulty Member with the
Massachusetts Institute of Technology, Cambridge, MA,USA. His
research interests include applications of power electronics in
dis-tribution systems and renewable energy resources, grid
interconnection issues, power quality enhancement, ac tive
power filters, and electric vehicles.