Embed Size (px)
Citation preview

An instrument for precision magnetic measurements of large magnetic structures
D. Beltrán, J. Campmany, J. Bordas A. Molins, J. Perlas, J. Rosich, M. Traveria
1 st-October-2001
Outline
� Introduction
� Design requirements
� Performance
� System description
� Real examples
� Conclusions

LLS (Spanish synchrotron light source) at Barcelona
Characterize B in Bending, Quadrupolar and higher order magnets

• ∆∆∆∆B < ± 2 Gauss (B < 1.4 T)
• Scan a Volume 500 x 250 x 3000 mm3
• Position confusion < ± 50 µµµµm
• Hall probe motion re-programmable


• Anti-vibration floor (50µµµµm)
• Magnet support (6000 Kg)

• Hall probe bench (500x250x3000 mm3)

X
Y
Z
1. Parallelism magnet-bench 2. Translation vector magnetic struc.-bench
Reference magnet mechanical center to arm coordinate system

• Hall probe
• Hall probe power supply
• Voltmeter
Manufactured by Sentron
450 mV/T ±10%
• Calibration system
• Reference Magnet ∆∆∆∆B/B < 15 ppm
• DC Power converter ∆∆∆∆I/I < 2 ppm
• Magnetometer ∆∆∆∆B < 0.02 G

• Temperature controller
• Magnet power converter
• Cooling system

RS-485
CPUCM-cpu40
SWITCHETHERNET
CPUMVME147
GPIB
PMAC
PS Danfysik Calibration Magnet
Metrolab PT 205 NMR Probe
Motor, drivers,encoders
Mechanical arm
HP3631A
Keithley 2010
Eurotherm 2408
Philips Digital 280
PS Enertrón
Magnetundertest
Hall probe
ETHERNETVMEGPIBRS-232RS-485
Operatorinterface
I/Ocontroller Devices
ETHERNETSWITCH

MedmCA client
Operator Inte rface
GUI
CA Server
CA client
Sequencer C Lib
Registers: ai, ao, strin, strout
Applica tion code
Database
Input/Output Controller
Device DriverGPIB RS-232 RS-485 PMAC
LAN
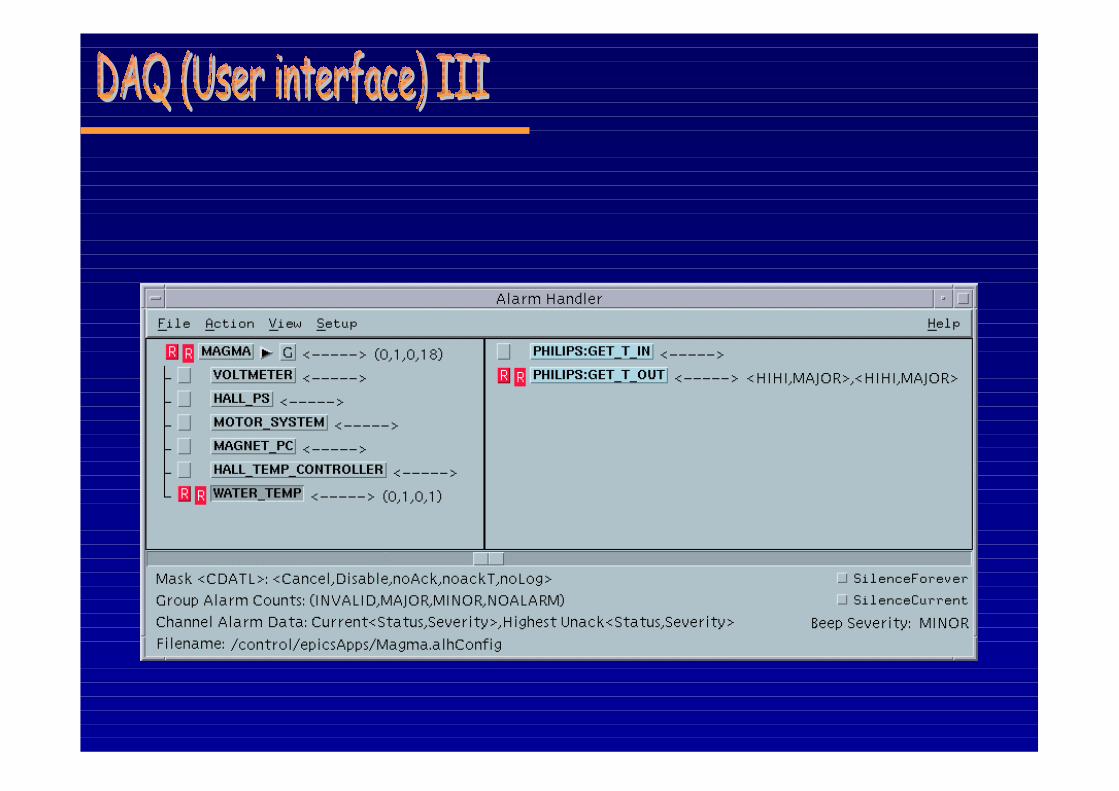
Alarm Handler
Toolkit EPICS



29/7/9917:45magma990729-1745.binNormalMeasurement2000Magnet #9Hour minute second TH Tin Tout X(mm) Y(mm) Z(mm) Vx(mV) Vy(mV) I(A)16 9 20 0.0 0.0 0.0 200.000 0.000 1000.000 4.567 352.848 0.0016 9 22 0.0 0.0 0.0 200.000 0.000 1010.001 4.581 353.016 0.0016 9 25 0.0 0.0 0.0 200.000 0.000 1020.000 4.234 352.826 0.0016 9 28 0.0 0.0 0.0 200.000 0.000 1030.000 4.590 353.002 0.0016 9 30 24.0 18.0 32.9 200.000 0.000 1040.000 4.621 352.832 849.9616 9 33 0.0 0.0 0.0 200.000 0.000 1049.999 4.432 352.999 0.00...

FINISHED
NEXTPOINT
DAQ
INIT
IDLEIDLE
ERROR
ANYANY
CONTINUE
INIT
NEXTPOINT
FINISHED
DAQ
NEXTPOINT
DAQ CONTINUE
ANY
ERROR
ANY

Labview

Total systematic ± 1.6 Gauss
Total random ± 0.4 Gauss
Error source Rnd/Syst Relation with B Worst case
Magnet power supply (∆I1) Syst ± 0.28 GaussII
BB 1∆=∆
Hall probe power supply (∆V1) Syst ± 0.25 Gauss1VVBB ∆×=∆
Multimeter (∆V2) Syst ± 0.12 Gauss2VGainB ∆×=∆Calibration Error (∆Β1) Syst ± 0.9 Gauss1BB ∆=∆
Temperature (∆T1) Rnd ± 0.15 Gauss14 )105.0( TBB ∆×+=∆ −
Hall probe power supply (∆V3) Rnd ± 0.02 Gauss3VVBB ∆×=∆
Cable noise (∆V6) Rnd ± 0.04 Gauss6VGainB ∆×=∆Hall probe noise (∆V5) Rnd ± 0.4 Gauss5VGainB ∆×=∆Multimeter (∆V4) Rnd ± 0.03 Gauss4VGainB ∆×=∆

� LLS Bending magnet prototype
� ANKA storage ring bending magnets
� CLS combined magnets

• High precision measurement system (±2 Gauss)
• Large volume (250x20x300 mm3) with high precision (±50µµµµm)
• Easily adapted of a wide range of magnets
• In situ data analysis
• Proved: LLS prot., Anka bending, CLS prototype
• Movement + acquisition: 2.5 s per point





























