Embed Size (px)
Citation preview

• A fully autonomous robot designed to navigate and solve a maze.
• To create a basic micromouse that can run through the maze
• To gain more experience and knowledge in dealing with circuits and programming

• Power• Motor• Sensors• Program

• Tests– What signal is sent to the rabbit– Appropriate distance away from the walls– Placement

• Array of 10 sensors
• Four on the sides to provide correction
• Should we have more???

• Chassis– Get one
• Board– Modify boards to cover proper area– Wire up the different components
• Program– Decide on an maze solving algorithm
• Power– In the process of ordering batteries

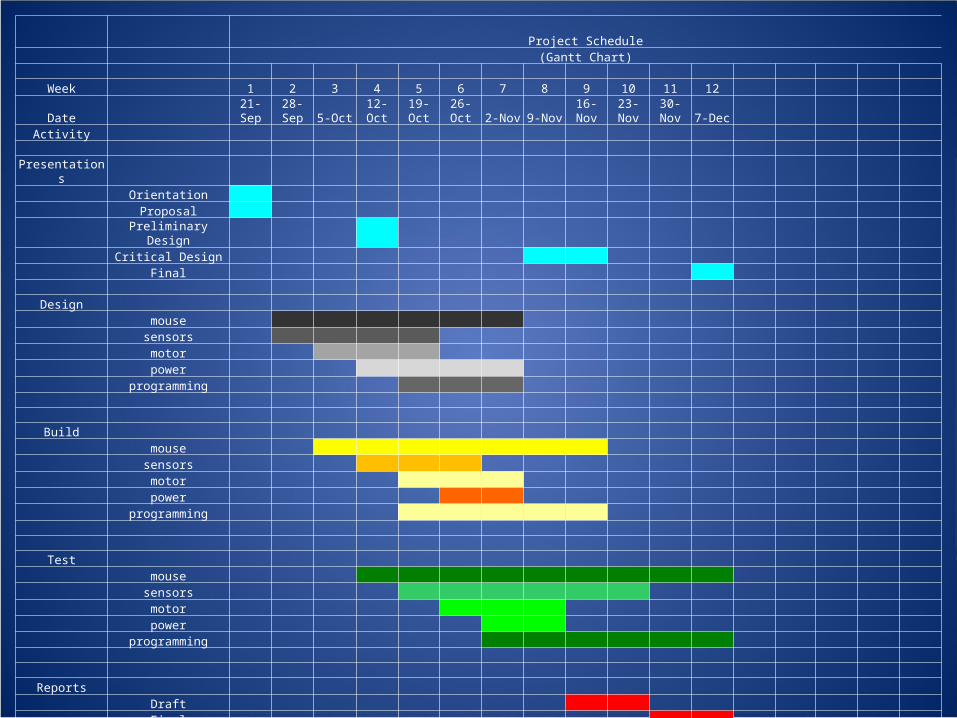
Project Schedule(Gantt Chart)
Week 1 2 3 4 5 6 7 8 9 10 11 12Date 21-Sep 28-Sep 5-Oct 12-Oct 19-Oct 26-Oct 2-Nov 9-Nov 16-Nov 23-Nov 30-Nov 7-Dec
Activity
PresentationsOrientation Proposal
Preliminary Design Critical Design
Final
Designmouse sensors motor power
programming
Buildmouse sensors motor power
programming
Testmouse sensors motor power
programming
ReportsDraft Final
Project Schedule(Gantt Chart)
Week 1 2 3 4 5 6 7 8 9 10 11 12Date 21-Sep 28-Sep 5-Oct 12-Oct 19-Oct 26-Oct 2-Nov 9-Nov 16-Nov 23-Nov 30-Nov 7-Dec
Activity
PresentationsOrientation Proposal
Preliminary Design Critical Design
Final
Designmouse sensors motor power
programming
Buildmouse sensors motor power
programming
Testmouse sensors motor power
programming
ReportsDraft Final