Embed Size (px)
Citation preview

ARTICLE IN PRESS
0029-8018/$ - se
doi:10.1016/j.oc
�CorrespondiE-mail addre
Ocean Engineering 34 (2007) 1863–1881
www.elsevier.com/locate/oceaneng
A comparative linear and nonlinear ship motion studyusing 3-D time domain methods
S.P. Singha,�, Debabrata Senb
aIndian Register of Shipping, 52-A, Adi Shankaracharya Marg, Opposite Powai Lake, Powai, Mumbai 400072, IndiabDepartment of Ocean Engineering and Naval Architech, IIT Kharagpur, India
Received 15 May 2006; accepted 27 October 2006
Available online 20 February 2007
Abstract
This paper reports on 3D time domain seakeeping computations at different level of modeling of nonlinear effects. Four successively
improved levels of computations are considered: (i) a linear computation, (ii) Froude-Krylov nonlinear computation, (iii) body nonlinear
computation where the perturbation potential is computed based on the instantaneous hull under the mean free-surface, and finally
(iv) the body-exact nonlinear computation, where the perturbation potential is determined based on the wetted hull under the incident
wave profile after suitable mapping of the hull into a computational domain. Computations are carried out for a Wigley hull (having less
‘geometric’ nonlinearity due to vertical sides), and a S175 hull at different forward speeds. The results are obtained for both regular and
irregular waves.
r 2007 Elsevier Ltd. All rights reserved.
Keywords: Nonlinear seakeeping; 3D time domain; Transient Green’s function
1. Introduction
Accurate prediction of wave-induced motions and sea-loads is of crucial importance in the design of marinestructures. Large motion affects operability and safetywhile extreme loads can lead to structural damage. Earlierdevelopments for ship-motion prediction methods werebased upon 2D theories. A variety of 2D strip theoriesfor computing ship motions were developed during1960–1970s. The STF version of strip-theory (Salvesenet al., 1970) is still used widely by industry for practicalship-motion computations, particularly during initial de-sign-spiral iterations. Although strip theories producedquite acceptable results for a wide range of applications,most versions of these 2D methods in their developmentrequired assumptions of low to moderate Froude numberand high frequency, and therefore unable to producereliable results at high Froude number and in followingwaves. These inadequacies along with growth in available
e front matter r 2007 Elsevier Ltd. All rights reserved.
eaneng.2006.10.016
ng author. Tel.: +9122 30519498; fax: +91 22 25703611.
sses: [email protected] (S.P. Singh),
p.ernet.in (D. Sen).
computational power resulted in R&D efforts for devel-opment of full 3D methods from the 1980s. The available3D methods can be broadly categorized in three groups:(i) solution in the frequency domain using the frequency-domain forward speed Green function (Guevel and Bougis,1982), (ii) solution based on Rankine panels (Nakos andSclavounos, 1990; Kring et al., 1996), and (iii) solution inthe time-domain using the transient Green function andconvolution integral (King et al., 1988; Bingham et al.,1993, 1994; Lin and Yue, 1990). One of the main concernsof the seakeeping research community has been to addressthe need of the industry for reliable predictions fornonlinear loads and motions within engineering accuracy.While the above 3D methods and their many variants havetheir respective relative merits and drawbacks, an impor-tant consideration in applying these methods therefore iswhether they can be extended to model nonlinearities inship motions and sea loads.The full nonlinear solution for the 3D ship motion
problem can be approached using a MEL type of methodsimulating ship motions in a numerical wave tank (Beck,1994; Subramani et al., 1998). In the recent past, RANSE-based CFD solvers are also being used for the 3D ship

ARTICLE IN PRESSS.P. Singh, D. Sen / Ocean Engineering 34 (2007) 1863–18811864
motion computations (Gentez et al., 1999; Kinoshita et al.,1999). However, it appears fair to state that these types of3D fully nonlinear solution schemes, even for the simplifiedzero-speed case, is presently not in a state of developmentwhere they can be used for practical computation byindustry (see e.g., Beck and Reed, 2000). Therefore, anumber of approaches have been developed wherenonlinearities are accounted for in some approximateway, although the methods are not always theoreticallyconsistent. ISSC loads committee for example carried out acomparative study for wave-induced loads on a simple box-shaped body from computations at 17 levels of approx-imations, and later comparisons from 22 levels ofapproximations for two barge-shaped hulls were reported(ISSC, 2000; Cariou and Jancart, 2003). The levels ofapproximations ranged from the very simple computationassuming the hull to be statically poised on a wave to themost complete 3D time-domain computations.
The main objective of the present work is to report onthe comparisons of different levels of nonlinear approx-imations to a basic 3D time-domain solver. It may be notedthat the 3D time-domain code represents the mostsophisticated computation level in the ISSC comparativestudy. The version of transient Green function methodused in the present work here allows consideration ofnonlinearities at different levels. The four levels ofapproximations considered are a fully linear computationand three successively higher (i.e. less approximate) levelsof nonlinear computations as detailed below. Besides theprimary modes of motions, important seakeeping perfor-mances are often decided by the derivative responsesresulting from combined effects of these primary motions.In this context, the relative phase between the motions is ofcrucial importance. For example, even if the peak-to-peakamplitudes of the fundamental displacements betweenvarious levels of nonlinear computations show marginaldifferences, the predictions for derivative responses maydiffer significantly. In this paper, besides the fundamentalmotions, we study two important parameters, the relativebow displacement and relative velocity at a forwardsection. These parameters are important in prediction ofbottom impact ‘slam’ pressure and deck wetness. A widelyused approach for slam prediction assumes that slammingwill occur at a section if the relative velocity of the sectionexceeds some threshold velocity. Slamming pressure ps isthen estimated using a relation of the type ps ¼
12
ksVR(x)2,
where VR(x) is the relative velocity of the section at x, andks is a coefficient which depends on sectional geometry.While advance CFD codes are being increasingly used inship design, routine slam load predictions needed in thestructural design of the fore-body is still largely performedbased on this type of velocity-squared semi-empiricalsimplified relations. In applying such a relation, one ofthe prerequisite is the estimation of the relative bow motionand velocity.
The 3D method used here follows the approach of Linand Yue (1990). The various levels of nonlinear approx-
imations are essentially as outlined in Lin et al. (1994).After providing a brief description of the 3D method, wediscuss some details of computations for the various levelsof approximations. Computations are performed for aWigley hull and a S175 hull for different Froude numbersin regular as well as irregular waves. Results are discussedprimarily focusing on the differences that arise from thesefour levels of computations. For example, it is observedthat the relative velocity, and therefore slam pressurepredictions, may differ considerably depending on the levelof approximation used.
2. Equations of motion
Consider a ship traveling with a steady forward velocityU in an incident wave field. At the outset, two right-handedCartesian coordinate systems are introduced, a space-fixedsystem and a body-fixed system. Accordingly, Oxyz is anearth fixed coordinate system with its origin O chosen tolye at the undisturbed free surface and positive z is directedvertically upwards. The x-axis is chosen to coincide withthe direction of the forward steady motion. The meanwater surface is thus given by the xy plane. The otherGx0y0z0 system is fixed with the ship with its origin G takenas the center of gravity (CG) of the body and the x0y0 planeforms the center plane of the hull. The general six-degreesof equation of motion are given by
m½ �_~uþ m½ � ~L�~un o
¼ ~F0; I½ �
_~Lþ ~L� I½ �~L ¼ ~M0. (1)
Here ~F0¼ ðF 0x;F
0y;F0zÞ and ~M
0¼ ðM 0
x;M0y;M
0zÞ are the
forces and moment vectors with the indicated componentsdefined in the body-system Gx0y0z0, ~u ¼ ðu; v;wÞ and ~L ¼ðLx;Ly;LzÞ are the linear and angular velocities, alsodefined with respect to the body-system, and [m] and [I] are,respectively the mass and moments of inertia matrices.For convenience, a third coordinate system O�x�y�z� isintroduced which is parallel to the inertial system with itsorigin O� fixed on the hull and lying vertically above/belowthe CG on the mean free-surface z ¼ 0. This system is thusadvancing with speed U along Ox.Study of motions of any 3D rigid object in space in its
most generalized form essentially implies tracing the body’sinstantaneous position in space and time. The location of arigid body in space is fully determined by the position ofthe origin of the body-fixed coordinate system (which is theCG of the body in the present case), and the angularorientation of the body-fixed system with respect to theearth-fixed system. Let ~xG ¼ ðxG; yG; zGÞ represent thecoordinate of G with respect to Oxyz system, and ~Y ¼ðj; y;cÞ represent the angular orientation of the Gx0y0z0
system with respect to the Oxyz system. Here (j, y,c) arethe usual roll, pitch and yaw angles, and the usual linearmotions of surge, sway and heave are given by the threecomponents of the vector ~xG � tU~i (~i ¼ unit vector alongOx, t ¼ time). The translational and rotational velocities ofthe body with respect to the earth-fixed system, _~xG and
_~Y,

ARTICLE IN PRESSS.P. Singh, D. Sen / Ocean Engineering 34 (2007) 1863–1881 1865
can be related to the body-fixed system using standardtransformation relations
_~xG ¼ ½Tx�~u;_~Y ¼ ½Ty�~L, (2)
where [Tx] and [Ty] are the two transformation matriceswhose elements consist of (j, y,c). _~xG and
_~Y can thusbe determined by integrating the equations of motion(1) and the transformation relations (2). Transformationbetween the various coordinate systems is straightforward~x ¼ ~xG þ ½Tx�~x
0¼ ~x� þ tU~i.
The above procedure for determining the instantaneousposition of the body in space is a generalized one and isvalid for any arbitrary large motion. When motionamplitudes are assumed small, i.e. for the linear problem,[Tx] and [Ty] reduce to identity matrices.
Integration of the equations of motions requires knowl-edge of the forces and moments, which in turn are obtainedby solving the hydrodynamic problem.
3. The hydrodynamic problem
The hydrodynamic problem is formulated based onstandard potential flow theory assumptions, which con-siders water to be inviscid, incompressible, and homo-geneous, and the flow is taken to be irrotational. Thisallows the flow-field to be described by a velocity potentialwhose gradient is the fluid velocity.
Following Lin and Yue (1990), the present formulationis developed using the earth-fixed (inertial) system.Accordingly, we define jTð~x; tÞ to be the total velocitypotential in the earth-fixed system. By separating theincident wave potential from this total potential, a‘perturbation’ or total disturbance potential jð~x; tÞ isdefined as
jð~x; tÞ ¼ jIð~x; tÞ � jTð~x; tÞ, (3)
where jI represents the incident wave potential. j thusincludes the contributions from the steady wave resistancepotential, and unsteady scattered and radiation potentials.As jI is explicitly known from a chosen wave-theory, theproblem thus converges to that of determining j.
The initial-boundary value problem for j is specified bythe following:
r2jdðx; y; z; tÞ ¼ 0; where ~x ¼ ðx; y; zÞ 2 O, (4)
q2jqt2þ g
qjd
qz¼ 0; on z ¼ 0, (5)
qjqn¼ ~V~n�
qjI
qn; on SBðtÞ, (6)
rjðx; y; z; tÞ ! 0 as x2 þ y2!1
and � z!1, ð7Þ
j! 0; at t! 0;qjqt! 0; at t! 0. (8)
In the above, O represents the fluid domain, SB(t) is theinstantaneous wetted body surface, ~n is the normal on SB
directed outwards to the fluid domain (inward to body)with components nx, ny, nz along x, y, z directions,respectively, ~V is the instantaneous body surface velocityand g is the acceleration due to the gravity. Eq. (4) above isthe governing equation (Laplace equation), Eq. (5) is thelinear free-surface condition, Eq. (6) is the body imperme-ability condition, Eq. (7) is the exterior (radiation)condition and Eq. (8) represent the initial conditions.The solution method of the above problem for the
unknown potential j is formulated using the transient freesurface Green’s function G given by
Gðp; t; q; tÞ ¼ G0 þ Gf ; for paq; t4t, (9)
where
G0 ¼1
r�
1
r0,
Gf ¼ 2
Z 10
½1� cosðffiffiffiffiffiffigk
pðt� tÞ�ekðzþxÞJoðkRÞdk,
r ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðx� xÞ2 þ ðy� ZÞ2 þ ðz� zÞ2
q,
r0 ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðx� xÞ2 þ ðy� ZÞ2 þ ðzþ zÞ2
q,
R ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðx� xÞ2 þ ðy� ZÞ2
q,
k ¼o2
gis the wave number,
J0 ¼ Bessel function of order zero. (10)
In the above, G0 and Gf represent the Rankine part andthe free-surface memory part of the Green’s function,p(x, y, z) and q(x, Z, z) are the field and the source points,q0 ¼ (x, B,�z) is the image of q above the mean free surfacez ¼ 0, t is the retarded time, and o and k are the wavefrequency and wave number, respectively. It is easy toverify that G given above representing a transient sourcepotential satisfies the problem posed by (4)–(8) except forthe body boundary condition. It may be noted that G0
t ¼ 0,and therefore
Gt ¼ Gft ¼ �2
Z 10
ffiffiffiffiffiffigk
psin
ffiffiffiffiffiffigk
pðt� tÞ
� �ekðzþzÞJ0ðkRÞdk.
(11)
Applying Green’s identity to j(q, t) and Gtðp; t; q; tÞ inthe fluid domain bounded by the mean free surface,instantaneous body surface SB, a hypothetical exteriorsurface SN at infinity in the horizontal and z-direction, theperturbation wave potential can be obtained in terms of

ARTICLE IN PRESSS.P. Singh, D. Sen / Ocean Engineering 34 (2007) 1863–18811866
source distribution as follows:
jðp; tÞ ¼ �1
4p
ZZSBðtÞ
sðq; tÞG0ðp; qÞdS
8><>:
þ
Z t
0
dtZZ
SBðtÞ
sðq; tÞGft ðp; q; t� tÞdS
264
�1
g
ZGðtÞ
sðq; tÞGft ðp; q; t� tÞUNUn dL
3759>=>;, ð12Þ
where q is the ‘source point’ on the body surface and s(q, t)is the associated source strength at time step t. G(t) in theabove expression represents the instantaneous waterline,i.e. the intersection of the free-surface z ¼ 0 with the bodysurface. In (12), Un ¼ ~U~n and UN ¼ ~UN̄, where N̄ is theunit normal to G(t). Un and UN are related by the followingrelation:
UN ¼Unx
N̄n̄. (13)
It may be observed that for a submerged body or for thecase of zero forward motion, the waterline integralvanishes. Application of the body boundary condition to(12) yields the following integral relation for a point p onthe surface:
qjðx; y; z; tÞqnp
¼ �1
4p
ZZSBðtÞ
sðq; tÞG0nPðp; qÞdS
8><>:
þ
Z t
0
dtZZ
SBðtÞ
sðq; tÞGfnptðp; q; t� tÞdS
264
�1
g
ZGðtÞ
sðq; tÞGfnptðp; q; t� tÞUNUn dL
3759>=>;.
ð14Þ
The above equation can be used to determine theunknown source strengths s(q, t), which in turn can beused in (12) to determine the unknown j over the bodysurface. Once the diffracted potential is obtained, pressureon the body can be determined from Bernoulli equationand the wave forces and moments can be easily obtained byintegrating pressure over the body surface.
Detailed derivation of the various integral relations of thisproblem is available in several sources, e.g. King et al. (1988).Once the unknown potential on the body is determined, fluidpressure is found from Bernoulli’s equation
pðx; y; z; tÞ ¼ �rqjqtþ
1
2rj�� ��2 þ gz
� �. (15)
The quadratic pressure term here is retained for thereasons mentioned in Lin and Yue (1990). The forces and
moments are obtained from integration of pressure
~F0¼
ZZSBðtÞ
p~n0 ds; M 0 ¼
ZZSBðtÞ
pð~x0 �~n0Þds, (16)
where ~n0 is the body surface normal defined in the bodysystem Gx0y0z0. These can be expressed as the sum ofFroude–Krylov force and moment ðF 0K;M
0KÞ arising from
the incident wave potential, the hydrodynamic force andmoment ðF 0H;M
0HÞ arising from the disturbance (perturba-
tion) potential, and the hydrostatic force and momentðF 0S;M
0SÞ arising from the static pressure term rgz. The
forces and moments in (16) are in the Gx0y0z0 system, and canbe easily transformed into the Oxyz or O�x�y�z� system asand when desired, using the transformation matrices.
4. Numerical solution
The numerical solution for the unknown source strengthand potential distribution over the body surface is obtainedfrom a discretized form of the integral relations (12) and(14). The well-known zeroth order constant panel methodis applied for the discretizations of the integral relations.Briefly, the steps involved are the following:
1.
Discretize SB(t) by N(t) planar quadrilateral andtriangular panels.2.
Identify the panels whose one side coincides with z ¼ 0,and this identify the straight line segments that are thediscretized form of G(t).3.
Assume s to be constant over the panels and overthe line segments. The s values over the line segmentsare taken same as the source strength of the adjoiningpanel.4.
Assume time-step size Dt to be constant in carrying outthe time integration and use a forward-step Eulermethod, and5.
Use trapezoidal rule for the convolution integration.This reduces the integrals (12) and (14) to the followingsystems of linear equations in terms of the discrete sourcestrengths and potentials:
jðpi; tÞ ¼ �1
4p
Xsj
ZDSj
G0 dS þ1
4pDt
�XM�1m¼0
XN
j¼1
smj
ZDSj
Gft ðpi; qj; tM � tmÞdS
"
�1
g
XNW
k¼1
snmk
ZDGk
Gft ðpi; qk; tM � tmÞUNk
UnkdL
#,
ð17Þ

ARTICLE IN PRESSS.P. Singh, D. Sen / Ocean Engineering 34 (2007) 1863–1881 1867
XN
j¼1
sMj
ZDSj
G0nPðpi; qjÞdS ¼ �4p ~V ðpi; tÞ � rfI ðpi; tÞ
h i~npi
� DtXM�1m¼0
�mXN
j¼1
smj
ZDSj
Gfnptðpi; qj; t� tÞdS
"
�XNW
k¼1
s�mk
ZDGk
Gfnptðpi; qk; t� tÞUNk
UnkdL
#; i ¼ 1;N.
ð18Þ
Both (17) and (18) can be cast in the form:
XN
j¼1
Aijaj ¼ bi; i ¼ 1;N, (19)
where aj ¼ fj for (12) and aj ¼ sj for (14). M and m in theabove are the indices for the current time t and retardedtime tt ¼MDt, t ¼ mDt, i and j are the indices for the fieldpoint p and source point q, respectively, k is the index forwaterline points, s0k’s are source strength over the waterlinesegments; e ¼ 0.5 for m ¼ 0 and 1 for m41.
It can be seen that in the initial boundary value problemspecified by Eqs. (4)–(8), the body boundary condition isapplied on the instantaneous wetted surface SB(t) while thefree-surface condition (5) is linearized. Accordingly, thediscretized form of the integral relations given by Eqs. (17)and (18) are applied over the instantaneous wetted surface(and the instantaneous waterline G(t)). Although theoreti-cally inconsistent, this formulation allows us to developsome practical nonlinear computation scheme based on thebody-wetted surface. The various schemes used here aredescribed below.
(a) Linear: If the wetted surface is taken as the time-invariant mean wetted surface SB(0), then the hydrody-namic problem for j is termed linear here (note that inpresence of forward speed, this Neumann–Kelvin problemmay not strictly be linear unless suitable restriction on theforward speed is imposed). When the j solution used is thislinear solution, and both hydrodynanic forces ðF 0H;M
0HÞ
and Froude–Krylov (F–K) forces ðF 0K;M0KÞ are determined
by integrating pressure over the mean wetted hull SB(0), thecomputation is termed linear. It may be noted that for thislinear computation, the hydrostatic force components areexpressed in terms of the standard linear restoring forcecoefficients, e.g., for heave and pitch the force andmoments are rgAWPz3 and rgrGMLz5, where AWP, rand GML are, respectively the waterplane area, meanunderwater volume and longitudinal metacentric height,and z3 and z5 are the heave and pitch motions.
(b) F–K nonlinear: In this computation, the disturbancepotential and the corresponding hydrodynamic force arecomputed as in the linear case, i.e. based on the meanwetted hull position. However, the incident wave forces arebased on the exact location of the hull considering theinstantaneous wetted hull under the incident wave profile.In other words, the F–K forces are computed exactly, while
the diffraction forces are linearized. This is termed as F–Kcomputation.(c) Body nonlinear: In this formulation, the disturbance
potential is solved based on the wetted hull formed byinstantaneous position of the hull under the mean waterline. This therefore requires re-panelization of the hull atevery instant of time and the computation count signifi-cantly increases since the Green’s functions need to becalculated at every time step unlike in the earlier two cases.Numerical experiments have shown that computationalburden can be considerably improved by a judicialcombination of direct computation and interpolation ofthe Green’s function.(d) Body exact: This is the most complete nonlinear
computation considered here. The formulation is similar tobody nonlinear except that the disturbance potential issolved considering the exact wetted hull under the incidentwave. Since the Green function based on which thehydrodynamic problem for j is solved satisfies the linearfree surface condition applicable on the mean free surface,the wetted hull must be bounded on top by the surfacez ¼ 0. This results in the requirement of transforming theactual wetted hull under the incident wave profile to amapped surface bounded on top by the surface z ¼ 0, i.e.the mapped surface must have the waterplane in the z ¼ 0plane. A formal justification of this method can beestablished on the assumption that the incident wave is ofmild slope (Lin and Yue, 1993; Lin et al., 1994).The above four schemes of linear, F–K nonlinear, body
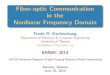
nonlinear and body exact are termed as level 1, level 2, level3 and level 4 computations, respectively. Note that levels2–4 consider nonlinearities in forces (and therefore in theresulting motions) in increasingly less approximate way.Schematic diagrams showing the various hull surfacesconsidered for the solution of the hydrodynamic (radia-tion–diffraction) forces and F–K forces are shown inFigs. 1–4.
5. Important numerical details
As seen from the above, one of the major differencebetween the various versions are the way the wetted hull isconsidered for the solution of the hydrodynamic (j)problem. For the linear and F–K nonlinear schemes, thehydrodynamic problem is solved based on the mean wettedhull under the mean free surface. The hull thereforeremains invariant in time, and hence the same set of panelscan be used to define the geometry at all the time steps,which can be generated prior to the start of the simulation.It is convenient to define and panelise the hull usingthe body system Gx0y0z0, but with origin at O�, i.e. using theO�x�y�z� system for the undisplaced (mean) position of thehull. As regards Green function evaluation, computationalefforts can be reduced considerably by storing the Greenfunctions and its derivatives for all past time steps. Forlong-duration simulations, there is however a trade-offbetween the computation time and storage requirements,

ARTICLE IN PRESS
ΦΙ Φ
Fig. 1. Hull geometry used for linear computation.
ΦΙ Φ
Fig. 2. Hull geometry used for Froude–Krylov nonlinear computation.
ΦΙ Φ
Fig. 3. Hull geometry used for body nonlinear computation.
ΦΙ Φ
Fig. 4. Hull geometry used for body exact computation.
S.P. Singh, D. Sen / Ocean Engineering 34 (2007) 1863–18811868
which also depends on the machine used. In general, formodern machines with large available RAM, it was foundadvantageous to store then re-compute, and this is whathas been followed in the present work.
For the F–K nonlinear scheme, it is essential todetermine the exact wetted hull under the instantaneousincident wave for evaluating the incident wave pressure. Asthis is not related to the hydrodynamic solution of j,several methods may be employed here. For example, aseparate mesh can be generated under the incident waveprofile at every step, or for ship-shaped configurations, theforces and moments along sections can be computed afterdetermining the wetted sectional girth and integratingalong the length. In the present work, the scheme used is asfollows. The hull is defined by another set of panels for theupper part of the hull. Both these hulls (termed lower andupper hulls) are now subdivided into a number of smallerpanels, thereby creating a fine mesh description of the hull.At every time step, these fine-mesh panels are checked fortheir relative position with respect to the incident wave.If the center of the panel is below the incident wave then itis considered wet, otherwise it is taken to be dry. The forcesand moments are found by simply adding the contributionover each panel, considering pressures at dry panels as
zero. For further refinement of this scheme, it is possible tofind the exact area of the partially wet panels. However, itwas found that for a ship-shaped body with a large water-plane area (unlike in an offshore structure with a numberof free-surface-piercing parts like cylinders), this fine gridand wet–dry computation provide sufficiently accurateevaluation of the F–K forces. The accuracy can beimproved by progressively subdividing the panels. Fromsuch convergence checks, it was found that in generalsubdivision of the original coarse panels (used for solving jproblem) into 4–8 smaller panels is sufficient for F–K forceevaluations to be convergent within 0.1% for usual ship-shaped geometries. Typically the coarse grid for theunderwater hull is of O(300–400) and the fine grid overthe full hull is of O(4000–5000). This F–K force evaluationrepresent a computing effort of O(N), and thus contributeonly marginally to the total computing effort. A point ofnote worth mentioning here is on the evaluation of incidentwave pressure at the panel centers. If a linear incident waveis used, then strictly the pressures at points within theregion 7ZI (the incident wave elevation) are same as atz ¼ 0, according to the linear wave theory. Alternatively,one of the available stretching methods such as Wheelerstretching (see e.g., Chakrabarti, 1987) can be used for the

ARTICLE IN PRESSS.P. Singh, D. Sen / Ocean Engineering 34 (2007) 1863–1881 1869
pressure evaluation. In the present work, the incident wavecan also be defined by a fully nonlinear numerical steadywave, described by the Fourier approximation method(Rienecker and Fenton, 1981). In such a case, the pressuresare exact. For most of our reported nonlinear computa-tions, the incident wave used is the nonlinear numericalwave.
In the body nonlinear formulation, the disturbancepotential j is solved based on the wetted hull formed bythe instantaneous position of the hull under the meanwaterline z ¼ 0. Therefore a re-panelisation of the bodysurface is required at every time step. To achieve this aB-Spline-based mesh generator is developed. The entirehull (up to main deck) is divided into large number ofstations. These stations are subsequently grouped depend-ing upon the location, e.g. the stern overhang, bulbousbow, aft body, parallel middle body and forward body mayused to form different groups of a conventional ship hull.During the computation, intersection of the mean watersurface with the stations in a group is found out and apatch of panels using B-Spline surface fitting techniques isgenerated for that group. All the patches from the variousgroups are then assembled together to form a completehull, which are then meshed. As the hydrodynamic solutionscheme based on the constant panel method is sensitive toaspect ratio of the panels (e.g. long thin panels may lead toinaccuracies), such panels are avoided by carefully insertingthe three-noded triangular panels. With regard to theevaluation of Green function, in this scheme there is nooption but to re-compute them at every time step. Thisscheme therefore represents a significantly increasedcomputing effort compared to the previous two schemes,although the demand on memory space is now less.
In the most compete body-exact computing scheme, themeshing techniques used is same as in the previousapproach, except that the under water geometry is foundout by taking the hull below the incident wave. In this case,therefore the intersection between the water surface and thehull will not be a flat surface given by z ¼ 0, which is arequirement for the solution of the hydrodynamic problem.This issue is resolved by mapping the wetted hull under ZIinto a mapped hull under the flat free surface. The mappingis achieved by transforming any point on P(x, y, z) on thehull into P((x, y, z�ZI)(x, y)). Therefore the upper bound-ary of the considered SB(t) which was defined byz ¼ ZI(x, y) will now become the z ¼ 0 plane. This means,as if the wetted hull is assumed to be deformable and theupper boundary surface has been stretched into a verticalplane. The result is a deformed hull geometry bounded onthe top by the flat free surface (see Fig. 4). It must be notedthat this mapped surface (and therefore panels) is used onlyfor the solution of the hydrodynamic problem to find theperturbation potential, i.e. in applying (17) and (18). Theevaluated pressures at the centers of the deformed panelsare however integrated over the original (undeformed)panels. Also, the qjI=qn needed for the body boundarycondition at the centers of the deformed panels are taken
same as in the un-deformed (original) panel centers. Thecomputation of F–K forces remains the same as in theprevious schemes.Computation of the linear incident wave pressure termðqjI=qtÞ is straightforward. For the computation of thelinear hydrodynamic pressure terms ðqj=qtÞ, it may benoted that the time-derivative refer to the pressures at anearth fixed point (x, y, z) as the j problem is formulated inthe inertial frame. However, the potentials evaluated are atpanel centers, i.e. for points located on the moving hull.qj=qt at any panel center P at time step n can calculated as
qjqt
� �P
n
¼DjDt
� �P
n
� ~VP
n ðrjÞPn . (20)
For the linear and F–K nonlinear problem, i.e. for thecases when the j solution is linear, Dj/Dt is calculated byusing a simple backward difference formula which workswell
DjDt
� �P
n
¼jP
n � jPn�1
Dt. (21)
~VP
n in these cases is equal to the forward speed U.The computation of Dj/Dt is however not so straight-
forward for body-nonlinear and body-exact formulationsas the number of panels may be changing between two timesteps and also the location of point P with respect to theglobal system will change. To evaluate this, here at anytime step, the values of j for the underwater body areinterpolated back to the points on the longitudinal stations,which were used for the B-spline mesh generation. At anytime step n, jP
n�1 is calculated by extracting the j from thepreviously interpolated values at the same local point P. Insome cases point P may be a dry point at time step n�1. Insuch cases jP
n�1 is taken to be zero.For evaluation of rj, an integral relation for velocity is
used, which can be obtained by taking gradient of (12).This is preferred over the determination of rj usingdifference formula. From computing point, this representsin insignificant increase in efforts as the gradients of G isavailable from computation of Gn. Efficient algorithmshave been earlier developed for accurate evaluation G andits gradients (Sen, 2002) which is used here.
6. Results and discussion
Computations are performed for a Wigley hull and theS175 container ship. The mean wetted part (the lower part)of the Wigley hull is defined by
y�
B¼ ð1� X Þð1� ZÞð1þ 0:2X Þ þ Zð1� Z4Þð1� X 4Þ,
(22)
where X ¼ ð2x�=LÞ2, Z ¼ ðz�=TÞ2, and B, T and L arebeam, draft and length of the hull, respectively (note thatthe hull is defined using the O�x�y�z� system at itsundisplaced position). The upper part of the hull above

ARTICLE IN PRESSS.P. Singh, D. Sen / Ocean Engineering 34 (2007) 1863–18811870
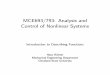
z ¼ 0 is considered wall sided with offsets same as at themean waterline. The S175 container ship on the other handhas considerable flare both in the forebody and aftbody.The main particulars of these hulls are shown in Table 1,and Fig. 5 shows their body plan.
The linear code has been validated earlier with availableresults in Lin and Yue (1990). These results and thus notpresented here (see e.g., Sen, 2002). As mentionedpreviously, besides the primary motions, the purpose ofthis paper is to explore the effect of the levels ofnonlinearities on the derivative response of relative verticaldisplacement and velocity. Displacement at any point ~x0Pon the hull can be determined by combining the motions asfollows:
~xP ¼ ~xG þ ½Tx�~x0P. (23)
The vertical velocity can similarly be obtained fromrigid-body kinematics as
_~xP ¼_~xG þ ~L� ~x
0P. (24)
For the case of only heave and pitch, and on assumptionthat pitch is small (as is usually for a ship), the verticaldisplacement and velocity at a point on the center-plane issimply given by
zP ¼ zG þ x0Py; _zP ¼ _zG þ x0P_y. (25)
For the relative vertical displacement and velocity, thelocal wave elevation needs to be considered. Since that thetotal potential jT is written as sum of the incident potentialjI and disturbance potential j (ref. Eq. (1)), the total wave-elevation and velocity at any longitudinal location x0 canbe separated into components due to the incident wave andthe perturbation wave field. The relative vertical displace-
Table 1
Particulars of the two hulls
Main particulars Wigley Hull S175 container ship
Length (L), m 100 175.0
Breadth (B), m 10.0 25.4
Draught (T), m 6.25 9.5
Depth (D), m 12.194 15.4
Displacement (ton) 2725 24 750
Block coefficient 0.425 0.57
Fig. 5. Body plan of Wigley hull and S175.
ment ZR and velocity VR can then be written as
ZRð~x0Þ ¼ ZRBð~x
0Þ � ZDðx
0Þ � ZIðx0Þ,
VRð~x0Þ ¼ VRBð~x
0Þ � VDð~x
0Þ � V Ið~x
0Þ, ð26Þ
where ZRBð~x0Þ is the vertical displacement of the rigid hull
at the considered point ~x0, ZD(x0) and ZI(x0) are the free-surface elevation due to the perturbation potential and theincident wave elevation at section x0, and VRBð~x
0Þ, VDð~x
0Þ
and V Ið~x0Þ are the corresponding velocities at point ~x0,
respectively. Determination of ZIðx0Þ and V Iðx
0Þ is straight-forward as these are available from the chosen incidentwave theory (however appropriate coordinate transfersmay be necessary as mostly the incident waves are definedin the inertial reference frame). VDðx
0Þ is taken as qj=qz atthe considered point (note that the perturbation velocityvector rj has already computed). For the perturbationwave elevation ZDðx
0Þ, this is taken as the linear approx-imation of the wave elevation; ZDðx
0Þ ¼ �ð1=gÞðqj=qtÞ.ZR is important for studies related to deck wetness and
emergence of the forefoot, while VR is the decidingparameter for determining slamming impact pressure. Asboth deck wetness and slamming are most pronounced inhead wave conditions, the computations performed in thiswork are for head waves. The section x
0
is chosen to be theFP, and the point considered is at the keel level. It may benoted that in many practical methods used for determiningZR and VR, the contribution of ZDðx
0Þ and VDðx0Þ are not
usually considered (see e.g., Bhattacharyya, 1978; Journeeand Pinkster, 2002). Thus, to determine the relativeimportance of the contribution of the three components(the rigid hull part ZRBðx
0Þ, VRBðx0Þ, the incident wave part
ZIðx0Þ, V Iðx
iÞ and the perturbed wave field part ZDðx0Þ,
VDðx0Þ, these components are shown separately for some of
the computations below. For convenience of reference,these terms are referred as rw1, rw2, rw3 for ZRBðx
0Þ, ZDðx0Þ
and ZIðx0Þ, and rvel1, rvel2, rvel3 for VRBðx
0Þ, VDðx0Þ and
V Iðx0Þ, respectively in the sequel.
Fig. 6 shows the heave and pitch motions of the Wigleyhull for l/L ¼ 1.2 at Froude number ¼ 0.2 and wave slopeof kBa ¼ 0:08 (k ¼ wave-number ¼ 2p/l, l ¼ incidentwave length, Ba ¼ incident wave amplitude). It can be seenthat the four levels of computations do not show much ofdifferences, indicating the contribution of nonlinear effectsfor this case to be insignificant. Fig. 7 shows the threecontributory components ZRBðx
0Þ, ZDðx0Þ and ZIðx
0Þ to therelative displacement for each of the four levels ofcomputations, plotted separately, in order to bring outthe relative importance of these components. Similar plotsfor the relative velocity components are displayed in Fig. 8.As can be seen, the perturbed wave elevation (ZD) is almostnegligible in comparison to the other two contributionswhile the contribution of the perturbed wave velocity (VD)is considerable, comparable to the incident wave velocitycontribution. The other observation is that for this case theeffect of nonlinearities appears to be negligible, as therelative difference between the four levels of computations

ARTICLE IN PRESS
-1.5
-1
-0.5
0
0.5
1
1.5
-1.5
-1
-0.5
0
0.5
1
1.5
0 10 20 30 40 50 60
10 20 30 40 50 60
time (sec.)
Heave/ζ
A
Level 1 Level 2 Level 3 Level 4
Level 1 Level 2 Level 3 Level 4
-2
2
0
time ( sec.)
Pit
ch
/kζ A
Fig. 6. Heave and pitch motion for Wigley Hull (l/L ¼ 1.2, Fn ¼ 0.2, kBa ¼ 0:08).
Relative Motion(Wigley Hull, FN= 0.2,λ/L=1.2,kζA = 0.08,Level1)
-14
-12
-10
-8
-6
-4
-2
0
2
4
0 50 100 150 200 250 300
Time ( sec)
Rela
tive M
oti
on
( m
.)
rw1 rw2 rw3
Relative Motion(Wigley Hull, FN =0.2,λ/L=1.2,kζA = 0.08, Level2)
-14
-12
-10
-8
-6
-4
-2
0
2
4
0 50 100 150 200 250 300
Time ( sec)
Rela
tive M
oti
on
( m
.)
rw1 rw2 rw3
Relative Motion(Wigley Hull, FN = 0.2,λ/L=1.2,kζA = 0.08,Level3)
-14
-12
-10
-8
-6
-4
-2
0
2
4
0 50 100 150 200 250 300
Time ( sec)
Rela
tive M
oti
on
( m
.)
rw1 rw2 rw3
Relative Motion(WigleyHull, FN =0.2,λ/L=1.2,kζA =0.08, Level4)
-14
-12
-10
-8
-6
-4
-2
0
2
4
0 50 100 150 200 250 300
Time ( sec)
Rela
tive M
oti
on
( m
.)
rw1 rw2 rw3
Fig. 7. Relative displacement of Wigley Hull (l/L ¼ 1.2, Fn ¼ 0.2, kBa ¼ 0:08).
S.P. Singh, D. Sen / Ocean Engineering 34 (2007) 1863–1881 1871
appears insignificant. This is more clearly visible in Fig. 9,where the total relative velocities for the four levels arecompared. In view of Fig. 6 showing almost same heaveand pitch motions (both amplitude and phase), this isperhaps expected.
In the next set of computations, results are shown forthe same wave length and steepness but for a higher
Froude number of 0.50. Time histories of the heave, pitch,relative displacement and relative velocity are shown inFigs. 10–12. The main observation here is that, the level 1and 2 computations and the level 3 and 4 computationsappear to be comparable, and the differences between thesetwo sets appear to be in predicting the steady trim. Themore complete nonlinear models (levels 3 and 4), where the

ARTICLE IN PRESS
Relative Velocity (Wigley Hull, FN = 0.2, λ λ/L=1.2, kζA = 0.08, Level1)
-8
-6
-4
-2
0
2
4
6
8
10
0 10 20 30 40 50 60 0 10 20 30 40 50 60
Time (sec)
Rela
tive V
elo
cit
y (
m/s
ec)
rvel1 rvel2 rvel3
Relative Velocity (Wigley Hull, FN = 0.2, λ λ/L=1.2, kζA = 0.08, Level2)
rvel1 rvel2 rvel3
-8
-6
-4
-2
0
2
4
6
8
-8
-6
-4
-2
0
2
4
6
8
-8
-6
-4
-2
0
2
4
6
8
Rela
tive V
elo
cit
y (
m/s
ec)
Rela
tive V
elo
cit
y (
m/s
ec)
Rela
tive V
elo
cit
y (
m/s
ec)
Time (sec)
Time (sec)Time (sec)
0 10 20 30 40 50 60 0 10 20 30 40 50 60
Relative Velocity (Wigley Hull, FN = 0.2, λ λ/L=1.2, kζA = 0.08, Level3)
rvel1 rvel2 rvel3
Relative Velocity (Wigley Hull, FN = 0.2, λ λ/L=1.2, kζA = 0.08, Level4)
rvel1 rvel2 rvel3
Fig. 8. Relative velocity of Wigley Hull (l/L ¼ 1.2, Fn ¼ 0.2, kBa ¼ 0:08).
Relative Velocity (Wigley Hull, FN = 0.2, λ/L = 1.2, kζA = 0.08)
-10
-5
0
5
10
0
Re
lati
ve
Ve
loc
ity
( m
/s)
10 20 30 40 50 60
time (sec.)
Level 1 Level 2 Level 3 Level 4
Fig. 9. Comparison of relative velocity for Wigley Hull.
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0 5 10 15 20 25 30 35 40 45
time ( sec.)
Heave/ζ
A
Level 1 Level 2 Level 3 Level 4
Fig. 10. Heave and pitch motion for Wigley Hull (l/L ¼ 1.0, Fn ¼ 0.5, kBa ¼ 0:08).
S.P. Singh, D. Sen / Ocean Engineering 34 (2007) 1863–18811872

ARTICLE IN PRESS
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0 5 10 15 20 25 30 35 40 45
time ( sec.)
Pit
ch
/kζ A
Level 1 Level 2 Level 3 Level 4
Fig. 11. Pitch motion for Wigley Hull (l/L ¼ 1.0, Fn ¼ 0.5, kBa ¼ 0:08).
-8
-6
-4
-2
0
2
4
6
0 5 10 15 20 25 30 35 40 45
time
Re
l. V
elo
cit
y
Level 1 Level 2 Level 3 Level 4
Fig. 12. Relative velocity of Wigley Hull (l/L ¼ 1.0, Fn ¼ 0.5, kBa ¼ 0:08).
-1.5
-1
-0.5
0
0.5
1
1.5
He
av
e/ζ
A
Level 1 Level 2 Level 3
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 70605040302010 80
0 70605040302010 80
time (sec.)
time (sec.)
Pit
ch
/kζ A
Level 1 Level 2 Level 3
Fig. 13. Heave and pitch motion for Wigley Hull (l/L ¼ 2.0, Fn ¼ 0.2, kBa ¼ 0:08).
S.P. Singh, D. Sen / Ocean Engineering 34 (2007) 1863–1881 1873
nonlinearities in interaction hydrodyamics (i.e. in thesolution of j) were considered, show a steady negativetrim (bow-down).
Fig. 13 shows the motion results for the Wigley hull in alonger wavelength of l/L ¼ 2.0 for the same steepness ofkBa ¼ 0:08. In absolute terms, the wave height for this runis H=T ¼ 2zz=T ¼ 0:815. For this relatively large waveheight (H) compared to body draft (T), the last level of
body exact computations could not be performed as thealgorithm breaks down due to numerical problems. Whilethe linear results (level 1) shows a sinusoidal time plot ofmotion histories, the nonlinear computations with levels 2and 3 show considerable nonlinearities, evident from thepresence of higher harmonic components. Figs. 14 and 15show the plots for the relative motions and velocities.Beside the existence of nonlinear features in the levels 2 and

ARTICLE IN PRESS
-18
-16
-14
-12
-10
-8
-6
-4
-2
0
2
4
0 8070605040302010
time (sec.)
Re
lati
ve
Dis
pla
ce
me
nt
Level 1 Level 2 Level 3
Fig. 14. Relative motion of Wigley Hull (l/L ¼ 2.0, Fn ¼ 0.2, kBa ¼ 0:08).
-15
-10
-5
0
10
5
15
0 8070605040302010
time (sec.)
Rela
tive D
isp
lacem
en
t
Level 1 Level 2 Level 3
Fig. 15. Relative velocity of Wigley Hull (l/L ¼ 2.0, Fn ¼ 0.2, kBa ¼ 0:08).
-2
-3
-4
-1
1
0
2
3
4
5
He
av
e (
m.)
-0.1
-0.2
-0.3
0
0.1
0.2
0.3
0 70605040302010 80
0 70605040302010 80
time (sec.)
time (sec.)
Pit
ch
(ra
d.)
Level 1 Level 4Level 2 Level 3
Level 1 Level 4Level 2 Level 3
Fig. 16. Heave and pitch motion for Wigley Hull (Hs ¼ 5.0m, T1 ¼ 8.0 s, Fn ¼ 0.3).
S.P. Singh, D. Sen / Ocean Engineering 34 (2007) 1863–18811874
3 computations, there are significant differences in the peakvalues of these nonlinear computations with the linearpredictions. The two nonlinear predictions are comparable,but they underestimate the linear predictions by approxi-mately 30% in the negative peak value of the relativedisplacement while overestimate the relative velocity inboth positive and negative peak values by approximately30–40%. Clearly the predictions of slam and deck wetness
occurrence from the linear and nonlinear computations willbe considerably different.Fig. 16 shows the motion results for the Wigley hull in an
irregular sea for all four levels. This result is for anirregular wave described by a two parameter ITTC wavespectrum corresponding to significant height of HS ¼ 5.0mand peak-period of T1 ¼ 8 s (Froude number is 0.3).Overall, only marginal differences between the motions

ARTICLE IN PRESSS.P. Singh, D. Sen / Ocean Engineering 34 (2007) 1863–1881 1875
could be observed, with linear prediction generally produ-cing the least heave and largest pitch estimates. Thenonlinear computations show comparable results, butcareful observation will reveal marginal differences amongthem too. Similar comments apply for the relative motionsand velocities shown in Figs. 17 and 18, respectively. It maybe noted that at time between 45 and 55 s where themaximum values occur, the difference among thesepredictions are quite considerable (the lowest and highestvalues differing by about 30–40%).
The next set of results are for the S175 hull. Heave andpitch for this hull at Froude number 0.275 at wave lengthof l/L ¼ 1 and wave steepness of kBa ¼ 0:08 are displayedin Fig. 19 for all four levels. The differences between thepredictions from the different levels are significant here forheave, while for pitch the differences are not as much. It isof interest to observe that the results from levels 3 and 4,which consider nonlinear solution of the hydrodynamicproblem (i.e. the perturbation wave-field) are comparablebut represents a significant reduction in the heaveamplitudes, to the tune of over 30%, when compared tolevels 1 and 2 where the hydrodynamics (j) solution islinear. This suggests the importance of nonlinear modelingfor the perturbation solution. Levels 3 and 4 results in factshow a greater difference with FK nonlinear computationthan the purely linear computation. Since these resultssuggest the importance of the modeling of the perturbationsolution, we plot in Figs. 20–23 the relative motions and
-25
-20
-15
-10
-5
0
5
10
0 10 20 30
time
rela
tive m
oti
on
Level 1 Lev
Fig. 17. Relative motion of Wigley Hul
0 10 20 30
Level 1
-20
-15
-10
-5
0
5
10
15
20
25
tim
Rela
tive v
elo
cit
y
Fig. 18. Relative velocity of Wigley Hu
velocities for the two extreme levels with and without thecontributions arising from the perturbation wave field (i.e.,with and without inclusion of ZD and VD in (25)). Theresults however suggests that this effect is not so significantfor motions, but somewhat more so for the velocities. Thisin turn suggests that the computed values of ZD and VD
may not be strongly influenced by the modeling, whichmeans the effect is mostly in the rigid body motions itself(which can in fact be inferred from the heave result inFig. 19). Comparison of the relative motions and velocitiesfrom the four levels for this case are shown in Figs. 24 and25. The differences between the predictions are compara-tively less than the differences in pure heave motion. This isperhaps due to the fact that pitch is a major component ofrelative motions/velocity, and pitch predictions were onlymarginally different (see Fig. 19). However, differences doexist, and careful observation will reveal that level 3predictions are quite different in their nature compared tothe rest.The next set of results are for a longer wave of l/L ¼ 2.0
but of a lower steepness of kBa ¼ 0:04. However, note thatthe absolute wave height remains same as in the previouscomputation. The heave and pitch results, displayed inFig. 26, show that the predictions are sensitive to themodeling. In particular, pitch values, which were found notto depend much on modeling for the case of lower wavelength, is found to differ considerably here with the peakvalues between the lowest and highest estimates differing
40 50 60 70 80
(sec.)
el 2 Level 3 Level 4
l (Hs ¼ 5.0m, T1 ¼ 8.0 s, Fn ¼ 0.3).
40 50 60 70 80
Level 2 Level 3 Level 4
e (sec.)
ll (Hs ¼ 5.0m, T1 ¼ 8.0 s, Fn ¼ 0.3).

ARTICLE IN PRESS
-20
-15
-10
-5
0
0 10 20 30 40 50 60
time ( sec.)
Rela
tive m
oti
on
( L
evel 1)
with rw2 without rw2
Fig. 20. Relative motion of S175 Hull (l/L ¼ 1.0, Fn ¼ 0.275, kBa ¼ 0:08, Level 1).
-20
-15
-10
-5
0
0 10 20 30 40 50 60
time ( sec.)
Rela
tive m
oti
on
( L
evel 4)
with rw2 without rw2
Fig. 21. Relative motion of S175 Hull (l/L ¼ 1.0, Fn ¼ 0.275, kBa ¼ 0:08, Level 4).
-10
-8
-6
-4
-2
0
2
4
6
8
0 10 20 30 40 50 60
time (sec.)
Rela
tive V
elo
cit
y (
level1
)
with rvel2 without rvel2
Fig. 22. Relative velocity of S175 Hull (l/L ¼ 1.0, Fn ¼ 0.275, kBa ¼ 0:08, Level 1).
-1.5
-1
-0.5
0
0.5
1
1.5
2
0
time ( sec.)
heave/A
Level 1 Level 2 Level 3 Level 4
Level 1 Level 2 Level 3 Level 4
-1.5
-1
-0.5
0
0.5
1
1.5
time ( sec.)
PIt
ch
/kA
10 20 30 40 50 60 70
0 10 20 30 40 50 60 70
Fig. 19. Heave and pitch of S175 Hull (l/L ¼ 1.0, Fn ¼ 0.275, kBa ¼ 0:08).
S.P. Singh, D. Sen / Ocean Engineering 34 (2007) 1863–18811876

ARTICLE IN PRESS
-12
-10
-8
-6
-4
-2
0
2
4
6
8
0 10 20 30 40 50 60
time (sec.)
Re
lati
ve
Ve
loc
ity
( le
ve
l4)
with rvel2 without rvel2
Fig. 23. Relative velocity of S175 Hull (l/L ¼ 1.0, Fn ¼ 0.275, kBa ¼ 0:08, Level 4).
-20
-15
-10
-5
0
0 605040302010
time (sec.)
Re
lati
ve
mo
tio
n
Level 2Level 1 Level 3 Level 4
Fig. 24. Relative motion of S175 Hull (l/L ¼ 1.0, Fn ¼ 0.275, kBa ¼ 0:08).
-20
-15
-10
-5
0
0 605040302010
time (sec.)
rela
tiv
e v
elo
cit
y
Level 2Level 1 Level 3 Level 4
10
5
Fig. 25. Relative velocity of S175 Hull (l/L ¼ 1.0, Fn ¼ 0.275, kBa ¼ 0:08).
-1.5
-2
-1
-0.5
0
0.5
1
1.5
2
He
av
e/ζ
A
Level 1
Level 1
Level 2
Level 2
Level 3
Level 3
Level 4
Level 4
-2
-3
-1
0
1
2
3
0 70605040302010 9080
0 70605040302010 9080
time (sec.)
time (sec.)
Pit
ch
/kζ A
Fig. 26. Heave and pitch of S175 Hull (l/L ¼ 2.0, Fn ¼ 0.275, kBa ¼ 0:04).
S.P. Singh, D. Sen / Ocean Engineering 34 (2007) 1863–1881 1877

ARTICLE IN PRESSS.P. Singh, D. Sen / Ocean Engineering 34 (2007) 1863–18811878
by as much as about 40%. It is however difficult to tellwhether the predictions are consistent with the computa-tion level, i.e. whether the predicted values increase ordecrease consistently as the computation levels increasefrom 1 to 4. Figs. 27–30 shows the effect of inclusion of ZDand VD on the relative motions and displacements for thetwo extreme levels, as before. Once again, we find that this
-25
-20
-15
-10
-5
0
5
0 10 20 30 40
t
Rel. M
oti
on
( level 1)
With rw2
Fig. 27. Relative motion of S175 Hull (l/L
-20
-15
-10
-5
0
0.00 10.00 20.00 30.00 40.00
ti
Rel. M
oti
on
(le
vel 4)
With rw2
Fig. 28. Relative motion of S175 Hull (l/L
-15
-10
-5
0
5
10
0
Re
l. V
elo
cit
y (
lev
el 1
) With rvel2
10 20 30 40
t
Fig. 29. Relative velocity of S175 Hull (l/L
-8
-6
-4
-2
0
2
4
6
0
Rel. V
elo
cit
y (
level 4)
With rvel2
10 20 30 40
t
Fig. 30. Relative velocity of S175 Hull (l/L
effect is more pronounced for velocity, and in that it ismore pronounced for the level 4 computation. Compara-tive results for the relative motions and velocities areshown in Figs. 31 and 32. Once again, differences betweenthe predictions are evident, with relatively greater differ-ences in velocities compared to motions. An observation ofsome interest is that the percentile differences between the
50 60 70 80 90
ime
without rw2
¼ 2.0, Fn ¼ 0.275, kBa ¼ 0:04, Level 1).
50.00 60.00 70.00 80.00 90.00
me
without rw2
¼ 2.0, Fn ¼ 0.275, kBa ¼ 0:04, Level 4).
without rvel2
50 60 70 80 90
ime
¼ 2.0, Fn ¼ 0.275, kBa ¼ 0:04, Level 1).
without rvel2
50 60 70 80 90
ime
¼ 2.0, Fn ¼ 0.275, kBa ¼ 0:04, Level 4).

ARTICLE IN PRESS
-15
-10
-5
0
5
10
time (sec.)
Rel. V
elo
cit
y
Level 1 Level 2 Level 3 Level 4
0 10 20 30 40 50 60 70 80 90
Fig. 32. Relative velocity of S175 Hull (l/L ¼ 2.0, Fn ¼ 0.275, kBa ¼ 0:04).
-25
-20
-15
-10
-5
0
5
0 10 20 30 40 50 60 70 80 90
time (sec.)
Rel. M
oti
on
Level 1 Level 2 Level 3 Level 4
Fig. 31. Relative motion of S175 Hull (l/L ¼ 2.0, Fn ¼ 0.275, kBa ¼ 0:04).
-6
-4
-2
0
2
4
6
0 10 20 30 40 50 60 70 80 90 100
time ( sec.)
He
av
e (
m.)
Level 1 Level 2 Level 3 Level 4
Level 1 Level 2 Level 3 Level 4
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0 10 20 30 440 7 100
time (sec.)
Pit
ch
( r
ad
.)
50 60 70 80 90
Fig. 33. Heave and pitch motion for S175 Hull (Fn ¼ 0.4, Hs ¼ 5.0m, T1 ¼ 10.0 s).
-25
-20
-15
-10
-5
0
time (sec.)
Rela
tive M
oti
on
Level 1 Level 2 Level 3 Level 4
0 10 20 30 40 50 60 70 80 90 100
Fig. 34. Relative motion of S175 Hull (Fn ¼ 0.4, Hs ¼ 5.0m, T1 ¼ 10.0 s).
S.P. Singh, D. Sen / Ocean Engineering 34 (2007) 1863–1881 1879
relative velocities here are more than the correspondingresults for a shorter steeper wave (ref. Figs. 24 and 25). Inabsolute terms, the wave incident steepness of kBa ¼ 0:04
can be considered fairly mild, and this therefore suggeststhat the motion predictions may not be strongly influencedby incident wave nonlinearities (i.e. steepness). This means,

ARTICLE IN PRESS
-20
-15
-10
-5
0
5
10
time (sec.)
Rela
tive V
elo
cit
y0 10 20 30 40 50 60 70 80 90 100
Level 1 Level 2 Level 3 Level 4
Fig. 35. Relative velocity of S175 Hull (Fn ¼ 0.4, Hs ¼ 5.0m, T1 ¼ 10.0 s).
S.P. Singh, D. Sen / Ocean Engineering 34 (2007) 1863–18811880
even if we apply linear wave theory for describing theincident wave, depending on the modeling of the perturba-tion potential solution, there can be considerable differ-ences in the predictions.
In the final set of results, we show the time histories ofheave, pitch, relative motions and relative velocity for thisS175 hull computed in irregular waves (Figs. 33–35). Thewave field used is defined by the ITTC two parameterspectrum with HS ¼ 5m, T1 ¼ 10 s. The Froude number is0.4. This therefore represents a moderately high speed in amoderately high sea-state (of about 5–6). The differencesbetween the predictions are self-evident.
7. Concluding remarks
Results from 3D seakeeping computations based on atransient Green function-based time-domain solutionmethod are presented for Wigley hull and S175 hull.Computations were carried out at different levels ofmodeling of nonlinearities, and the results presented wereheave and pitch as well as relative vertical motions andvelocities at a keel point on FP. A total of four levels ofcomputations were considered, starting with a linearsolution to the most complete body-exact solution.Although all nonlinear solution methods are still approx-imate, the increasing levels of schemes represent acorrespondingly increasing level of completeness in model-ing the nonlinear effects. Comparative results betweenthese various levels of computations clearly bring out thefact that the results can difference considerably dependingon the modeling. The differences between the least andhighest predictions in some of results can be as much as30–40%. However, the differences are not necessarilyconsistent with the computation levels, meaning that theleast to highest (or vice-versa) predictions do not alwaysarise from level 1 to level 4 computations in that sequence.Note that there are two major nonlinear effects that aremodeled: the FK force and the nonlinearity in theperturbation solution. As these effects are not necessarilyof same nature, the sum effect may not show any fixedtrend for all frequency and forward speeds. What is moreimportant is that there are differences from the predictionlevels, indicating the importance of nonlinear model-ing. Some general conclusions that may be reached from
a careful study of the presented results are:
�
The nonlinear effects persist even if the wave slope issmall, particularly in longer waves. This indicatessignificance of nonlinear modeling of the hydrodynamic(j) problem. In other words, nonlinear modeling of onlyF–K force may be inadequate, particularly for longwaves. � Effects of nonlinear modeling appear more pronouncedfor S175 hull with flair compared to Wigley wall withwall-sided upper body. This suggests the significance ofthe so-called geometric nonlinearity.
� As for relative motion and velocity, modeling of the jsolution influences the relative velocity more stronglythan it does the relative displacement. This means, theoverall slam predictions (which is usually consideredproportional to the relative-velocity-squared) will beinfluenced far more strongly on non-linear modelingthan deck-wetness predictions.
References
Beck, R.F., 1994. Time-domain computation of floating bodies. Applied
Ocean Research 16, 267–282.
Beck, RF., Reed, A., 2000. Modern seakeeping computation for ships. In:
Proceedigs of the 23rd Symposium on Naval Hydrodynamics.
National Academy Press, Washington, DC, pp. 1–45.
Bingham, H.B., Korsmeyer, F.T., Newman, J.N., Osborne, G.E., 1993.
The simulation of ship motions. In: Proceedigs of the Sixth
International Conference on Numerical Ship Hydrodynamics. Na-
tional Academy Press, pp. 561–579.
Bingham, H.B., Korsmeyer, F.T., Newman, J.N., 1994. Prediction of
seakeeping characteristics of ships. In: Proceedings of the 20th
Symposium on Naval Hydrodynamics, Santa Barbara, CA, pp. 27–47.
Bhattacharyya, R., 1978. Dynamics of Marine Vehicles. Wiley Inter-
science.
Cariou, A., Jancart, F., 2003. Influence of modeling on calculated sea
loads on ships. Marine Structures 16, 149–173.
Chakrabarti, S.K., 1987. Hydrodynamics of Offshore Structures. Com-
putational Mechanics Publication.
ISSC, 2000. Committee I.2 ‘‘Loads’’ Report in the Proceedings, vol. 1.
Gentez, L., Guillerm, P.E., Alessandrini, G., Delhommeu, G., 1999. In:
Proceedings of the Seventh International Conference on Numerical
Ship Hydrodynamics, Paris, pp. 4.2-1–4.2-12.
Guevel, P., Bougis, J., 1982. Ship motions with forward speed in infinite
depth. International Shipbuilding Progress 29, 103–117.
Journee, J.M.J., Pinkster, J., 2002. Introduction in ship hydromecha-
nics. Delft University of Technology, Lecture MT519 /www.
shipmotions.nlS.

ARTICLE IN PRESSS.P. Singh, D. Sen / Ocean Engineering 34 (2007) 1863–1881 1881
King, B.W., Beck, R.F., Magee, A., 1988. Seakeeping calculations with
forward speed using time-domain analysis. In: Proceedings of the 17th
Symposium on Naval Hydrodynamics, The Hague, Netherlands.
Kinoshita, T., Kagemoto, H., Fujino, M., 1999. A CFD application to
wave-induced floating body dynamics. In: Proceedings of the Seventh
International Conference on Numerical Ship Hydrodynamics, Paris,
pp. 4.1-1–4.1-20.
Kring, D., Huang, Y.F., Sclavounos, P., Vada, T., Braathen, A., 1996.
Nonlinear ship motion and wave induced loads by Rankine Method.
In: Proceedings of the 21st Symposium on Naval Hydrodynamics.
Trondheim, Norway, pp. 45–63.
Lin, W.-M., Yue, D.K.P., 1990. Numerical solutions for large amplitude
ship motions in the time domain. In: Proceedings of the 18th
Symposium on Naval Hydrodynamics. National Academy Press,
Washington, DC, pp. 41–66.
Lin, W.-M., Yue, D.K.P., 1993. Time domain analysis if floating bodies in
mild slope waves. In: Proceedings of the Eighth International
Workshop on Water Waves and Floating Bodies. St. John’s, Canada,
pp. 69–70.
Lin, W.-M., Meinhold, M., Salvesen, N., Yue, D.K.P., 1994. Large-
amplitude motions and wave loads for ship design. In: Proceedings of
the 20th Symposium on Naval Hydrodynamics. National Academy
Press, Washington, DC, pp. 205–226.
Nakos, D., Sclavounos, P., 1990. Ship motion by a three dimensional
Rankine panel method. In: Proceedings of the 18th Symposium on
Naval Hydrodynamics. National Academy Press, Washington, DC,
pp. 21–40.
Rienecker, M.M., Fenton, J.D., 1981. A Fourier approximation method
for steady water waves. Journal of Fluid Mechanics 302, 203–229.
Salvesen, N., Tuck, E.O., Faltinsen, O.M., 1970. Ship motions and sea
loads. Transactions of the Society of Naval Architects and Marine
Engineers 78, 250–287.
Sen, D., 2002. Time-domain computation of large amplitude 3D ship
motions with forward speed. Ocean Engineering 29 (8), 973–1002.
Subramani, A., Beck, R.F., Scorpio, S., 1998. Fully nonlinear free surface
computations for arbitrary and complex forms. In: Proceedings of the
22nd ONR Symposium on Naval Hydrodynamics, Washington, DC,
pp. 47–58.