Embed Size (px)
Citation preview

Scientific Research and Essays Vol. 6(27), pp. 5726-5733, 16 November, 2011 Available online at http://www.academicjournals.org/SRE DOI: 10.5897/SRE11.786 ISSN 1992-2248 ©2011 Academic Journals
Full Length Research Paper
A comparative analysis of the virtual reference stations (VRS)
Ömer YILDIRIM
GDLRC, Department of Mapping, 06100, Ankara, Turkey. E-mail: [email protected].
Accepted 27 July, 2011
The concept of network Real Time Kinematic (RTK) method has enlarged the possible applications of precise positioning. While other network concepts are available, virtual reference stations (VRS
TM) is by
far the most popular choice for the nationwide networks. On the other hand, the available Network RTK methods are frequently questioned due to their location-dependent nature. This study introduces Turkish RTK Network and provides the first nationwide testing results of its performance. A comparative analysis is made for both the static and real-time positioning capabilities of Turkish National Permanent GPS Network with an emphasis on the precision of the real-time positioning. Key words: Global positioning system, real-time kinematic, precision.
INTRODUCTION Technology now provides us with new options for RTK surveying in the form of a reference station network, also known as a Virtual Reference Station (VRS
TM) network.
An initialization and constant communication with the rover is still required as with any RTK surveying but cellular network technology has replaced the radio for this internet-based communication. The network RTK surveying method eliminates the need for a local base station at the project site. With the reference station network technology, a virtual base is created at the project site without a capital investment required for a physical base or the labor costs for hiring someone to monitor the unit onsite. Due to the location and geometry dependent nature of Network RTK positioning, the performance of RTK Networks are usually tested at country or regional scale. Hakli (2004) made a detailed analysis of precision for Finnish RTK Network, Marel (1998) analyzed the VRS RTK performance in Netherlands, Retscher (2002) provided the performance results of RTK Network in Germany, Higgins (2001) presented the performance issues of Austrailan RTK network, Eren et al. (2009) presented a benchmarking test in the Marmara Region of Turkey. Several extensions to standard VRS positioning have also been proposed such as long range applications (Vollath et al., 2000b), multi-base VRS (Vollath, 2000a), EGNOS-based VRS applications (Soares and Malheiro, 2008). This study introduces Turkish RTK Network and provides the first
nationwide testing results of its performance. A reference station network is created by installing multiple fixed base stations in a given area much like any continuously operating reference station (CORS) application. GPS data is continuously collected at each of these fixed base stations and this data is transmitted via the broadband communication over the internet to a central server that quickly determines a precise model for the atmospheric (ionosphere and troposphere) and ephemeris corrections covering the entire network. A surveyor using a rover working within the network can connect to the central server via GPRS technology with a username and password; conduct a quick initialization (typically ranging from a few seconds to less than a minute), in effect generating a virtual reference station right next to the rover; and collect points within the vicinity of that reference station much like more conventional RTK applications. The benefits of reference station network technology are numerous. One major benefit of course is the significant reduction in the equipment costs.
Eliminating the need for a base station and radio communication (which can be somewhat problematic in certain project conditions) at the jobsite is also important. Moreover, the effort that can be required to establish known points at the project site in areas without published monuments can also be eliminated. Secondly, by removing the need for field personnel to watch over the base station, the required field effort for the project is

Yildirim 5727
Figure 1. The distribution of TNPGN stations.
dropped down to a half. And finally, equipment setup and initialization at the jobsite is greatly simplified (URL 1). VRS
TM-RTK results were compared with the coordinates
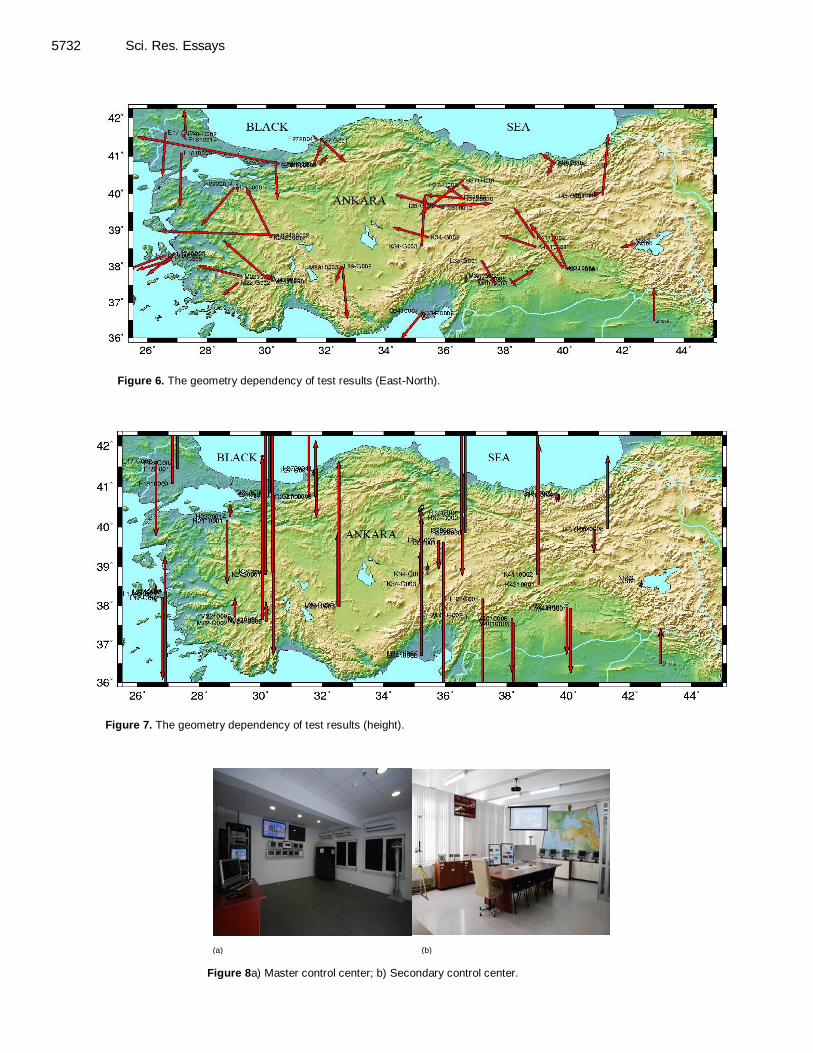
of zero-order reference network. 1.8, 1.6 and 8.7 cm differences were obtained for the east, north and up components, respectively which is above the average performance of instantaneous RTK positioning accuracy in the world. Turkish national permanent GPS network (TNPGN) Turkish National Permanent GPS Network (TNPGN) consists of 146 constant GPS stations (Figure 1), 142 in Turkey and 4 in Northern Cyprus and 2 control centers. Control centers 2 control centers have been established within the scope of TNPGN project (Figures 8a, and b); all TNPGN station data are transmitted to this station automatically and CORS network calculations and amendments performed here are conveyed to users.
i) Master control center (Figure 8a). ii) Secondary control center (Figure 8b). Control center besides servers has strong control software. Major functions of this software are: a) transfer of connection and observations to all NetR5 reference stations, b) calculation of the coordinates of TNPGN points, c) modeling of propagation and ephemeris errors, the calculation of amendments and their broadcasting to mobiles, d) RTK services, e) web services, f) monitoring of the mobiles, g) storage of data and other services. Control Center software has been provided by „Trimble VRS SW‟. This software has been designed for 250 Trimble® NetR5 reference station and consists of GPSNet
TM, RTKNet
TM, webserver, Rover integrity,
coordinate monitor and data storage modules. This software can calculate ionosphere, troposphere, multipath and orbit amendments, and can broadcast amendment/correction and/or coordinates upon FKP, VRS, MAC techniques for the purpose of determination of RTK location (Wubbena et al., 2001; Landau et al., 2002). For the communication between „control center‟ and mobile users RTCM 3.0 the following protocols are used, thus, radio is also included, their communication
5728 Sci. Res. Essays
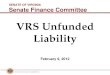
Figure 2. 4 + 4 server.
can be provided by NTRIP (network transport of RTCM via internet protocol) protocol over GSM, GPRS/EDGE. Thanks to TNPGN which consists of Trimble® NetR5 reference stations and control centers, RTK service is available nationwide for 24 h. On the main control center, over 4 + 4 pieces of GPSnet
TM server; stations in Turkey
divided into 4 regions operate (Figure 2). A backup server which belongs to each server can function atomically. From these stations, Rinex data for 1 s, 1 h and 30 s 24 h can be collected. Besides, precise efemeris data are also loaded by the system automatically.
VRS CMR+, VRS RTCM 3.1, SAPOS FKP 2.3, RTCM3Net (MAC) and DGPS amendment/correction broadcasting is provided from „main control‟ and „backup control center‟. A separate web router server transmits data coming from all stations to main GPSnet
TM servers,
backup web router server as real time. A second web router server has been adjusted so as to function automatically as a backup server. All correction are performed over broadcasts NTRIP (network transport of RTCM through internet protocol) Caster (Lenz, 2004), and clients are managed by client record and management program (CORSIZ). For static data utilization, a webserver software runs over web router server, and clients can download Rinex data by existing stations or during the period required for VRS
TM stations.
On NAS (network attached storage) server; 2TB hotswap RAID has been formed, rinex data and Hatanaka compressed data (Hatanaka, 1996), reports, log files and
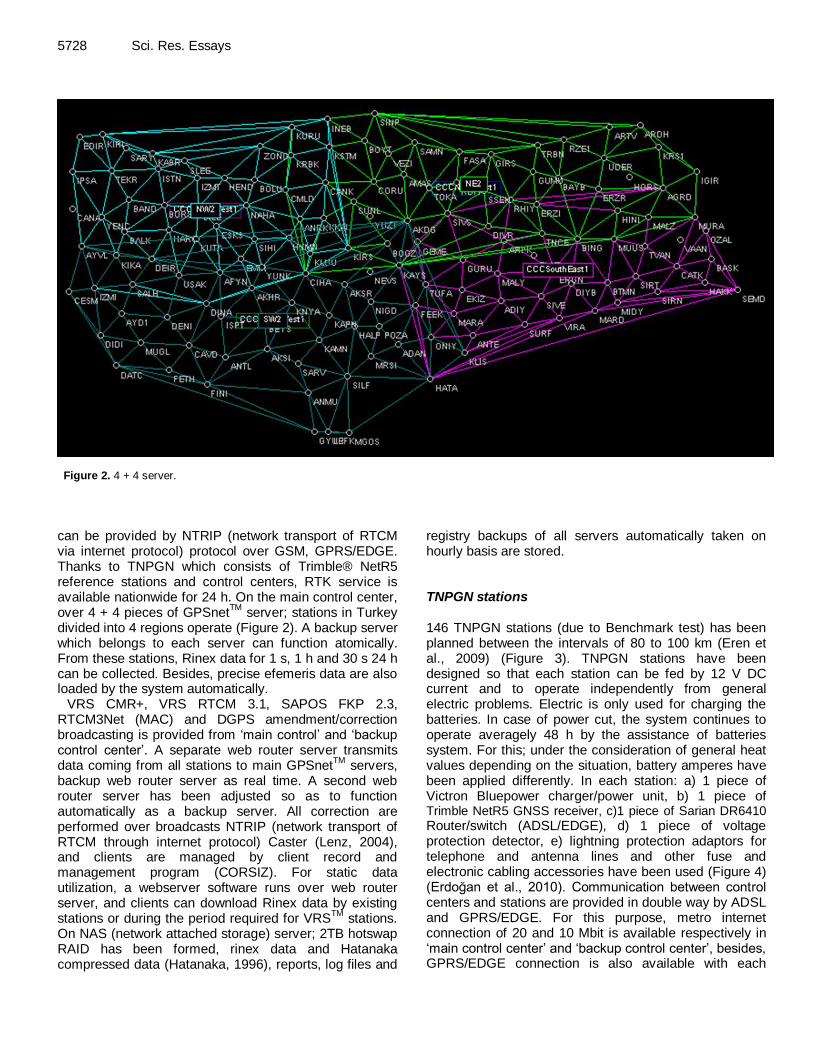
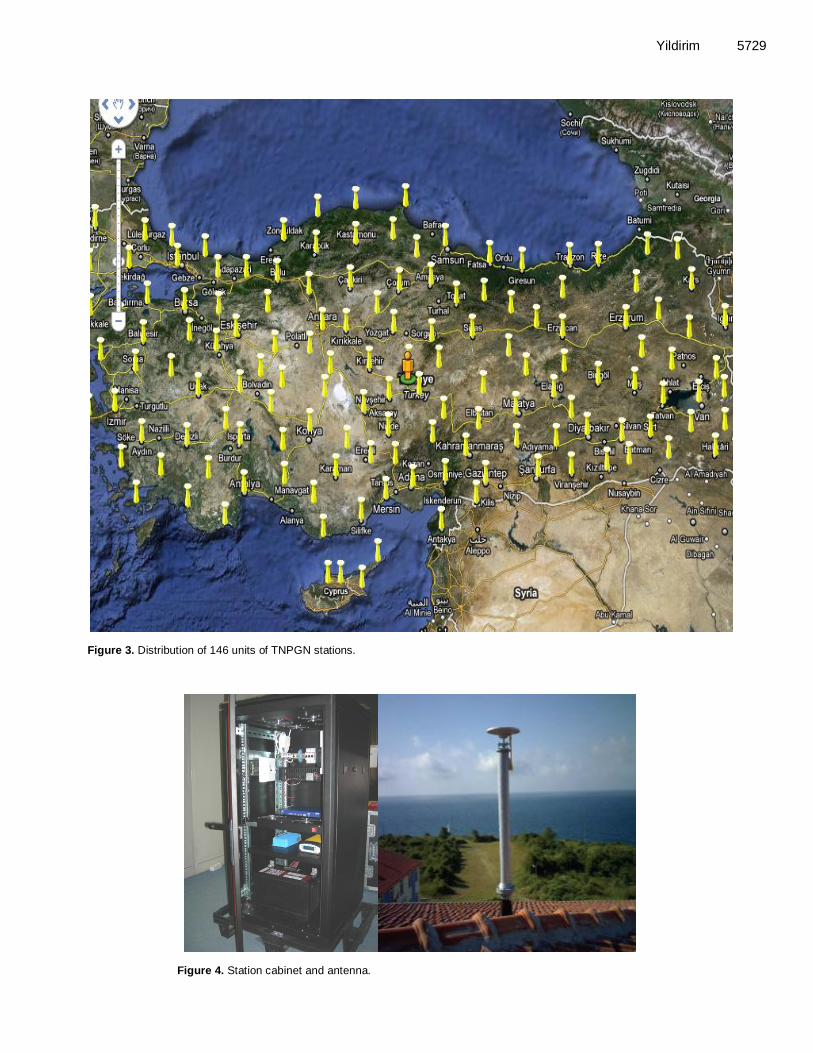
registry backups of all servers automatically taken on hourly basis are stored. TNPGN stations 146 TNPGN stations (due to Benchmark test) has been planned between the intervals of 80 to 100 km (Eren et al., 2009) (Figure 3). TNPGN stations have been designed so that each station can be fed by 12 V DC current and to operate independently from general electric problems. Electric is only used for charging the batteries. In case of power cut, the system continues to operate averagely 48 h by the assistance of batteries system. For this; under the consideration of general heat values depending on the situation, battery amperes have been applied differently. In each station: a) 1 piece of Victron Bluepower charger/power unit, b) 1 piece of Trimble NetR5 GNSS receiver, c)1 piece of Sarian DR6410
Router/switch (ADSL/EDGE), d) 1 piece of voltage protection detector, e) lightning protection adaptors for telephone and antenna lines and other fuse and electronic cabling accessories have been used (Figure 4) (Erdoğan et al., 2010). Communication between control centers and stations are provided in double way by ADSL and GPRS/EDGE. For this purpose, metro internet connection of 20 and 10 Mbit is available respectively in „main control center‟ and „backup control center‟, besides, GPRS/EDGE connection is also available with each
Yildirim 5729
Figure 3. Distribution of 146 units of TNPGN stations.
Figure 4. Station cabinet and antenna.

5730 Sci. Res. Essays
Table 1. Processing parametres.
Parameter Value
Cut-off angle 25˚
Used ephemerides *.sp3
Solution type All fix
Used Satellites GPS + GLONASS
Frequency Auto
Fix ambiquities up to 300 km
Sampling rates All
Tropospheric model Hopfield
Ionospheric model Klobucher
Ionospheric activity Medium
Max. baseline lenght for solution 300 km
Processing model All baseline
Coordinate seeding strategy Time
Table 2. Statistic of test points.
Variable s North (m) Height (m)
Number of points 48 48 48
Min. -0.0828 -0.0321 -0.2727
Max. 0.0308 0.0373 0.2893
Average -0.0089 0.0003 0.0148
RMS 0.018749 0.015986 0.087834
station. ADSL and GPRS/EDGE connection has been established in all stations.
Data coming from each station in every seconds is around 700 byte/s, data quantity coming from all stations to the control center is around 1.2 Mbit/s, whereas RINEX data recorded per day for 1 s is 20 GB and Rinex data for 30 s recorded daily in Hatanaka format is 230 MB.
Static processing of TNPGN
In the test study; LEICA LGO 7.0 software (Leica, 2010); having a strong algorithm for the evaluation of static data has been used. 3 h – static with intervals of 30 s observations have been performed on 48 points which have been homogeneously distributed in overall Turkey. For the elimination, antenna height errors test points have been selected from points of which facilities are pier. Observations performed have been processed in 2005.00 reference epoch based on 5 closest TNPGN stations surrounding the location of the point. Max difference coming from different baseline solutions in the processing have been determined as: ± 0.03 m at horizontal position and as: ± 0.05 m in vertical position. For the processing of collected data *.sp3 precise ephemeris data have been used and satellites having cycle-slip effect have been taken out of evaluation. In
Table 1, parameters used in ambiguity solution have been given. Test study
For comparing the accuracy of coordinates provided by the assistance of correction values supplied from TNPGN system; test measures have been performed in points, totally 48 units of which the facilities are pier which have been homogeneously distributed in Turkey (Figure 5). Test measures have been performed in two stages: a) collection of data within intervals of 30 s by 3 fours-
observations on specified test points, b) performing RTK measure by using TNPGN correction data on points where static observation is performed. The static data in test study was collected using the criteria given in Table 1. The coordinates and velocities of TNPGN stations are determined in Turkish National Reference Frame (TUREF) which coincides with ITRF96 at reference epoch 2005.0. The relevant ambiguity solutions have been accomplished in LGO 7.0 software. The statistics for the results was given in Table 2. In
Figure 5; the distribution of test points and the distribution of geometrical errors are given in Figures 6 and 7, respectively. The geometrical errors for the height components are also given in Figure 7.
RESULTS AND DISCUSSION In Turkey, main standards and legal regulation about geodetic Networks in Turkey is given by the Bylaw “large scale mapping and production mapping information”. The

Yildirim 5731
Test points
CORS-TR stations
Figure 5. The distribution of test points.
obtained results show that RTK positioning has the ability to achieve the accuracy requirements of the fourth –order densification points and details points as well as feature collection. Although, the accuracy in the vertical component is relatively lower, it is still within the bounds of many
applications. The static processing of the baselines with reference stations is also an important indication of the network configuration. Largest differences of 3 and 5 cm for the horizontal and the vertical, respectively show that the inter-station distance of the reference sites is
sufficiently small to allow for precise positioning. Afterwards, VRS-RTK results were compared with the coordinates of zero-order reference network. 1.8, 1.6 and 8.7 cm differences were obtained for the east, north and up components, respectively which is above the average performance of
5732 Sci. Res. Essays
Figure 6. The geometry dependency of test results (East-North).
Figure 7. The geometry dependency of test results (height).
(a) (b)
Figure 8a) Master control center; b) Secondary control center.

instantaneous RTK positioning accuracy in the world. REFERENCES
Erdoğan O (2010). 5th National Surveying Semposium, October 20-22,
2010, ZKÜ –Zonguldak (in Turkish).
Eren K, Uzel T, Gulal E, Yildirim O, Cingoz A (2009). Results from a Comprehensive Global Navigation Satellite System Test in the CORS-TR Network; Case Study. J. Surv. Eng., 135(1). 10-18
Hakli P (2004). Practical Test on Accuracy and Usability of. Virtual Reference Station Method in Finland, FIG Working. Week 2004, Athens, Greece, pp. 1-6.
Hatanaka Y (1996). A RINEX Compression Format and Tools, Proceedings of the 9th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1996), Kansas City,
MO, pp. 177-183. Higgins MB (2001). An Australian Pilot Project for A Real Time
Kinematic GPS Network Using the Virtual Reference Station
Concept, FIG Working Week 2001, International Federation of Surveyors (FIG), Seoul, Korea.
Landau H, Vollath U, Chen X (2002). Virtual Reference Station System,
J. Glob. Positioning Syst., 1(2): 137-143. Leica (2010). User Manual. Leica Geosystems, AG, Heerbrugg,
Switzerland. P. 150.
Lenz E (2004). FIG Working Week 2004, Athens, Greece. Marel H, van der (1998): Virtual GPS Reference Sta-tions in the
Netherlands. Proc. ION GPS ‟98, Nashville, pp. 49-58.
Retscher G (2002). Accuracy Performance of Virtual Reference Station (VRS) Networks J. Glob. Positioning Syst., 1(1): 40-47
Yildirim 5733 Soares MG, Malheiro B (2008). "EGNOS Based Virtual Reference
Stations", Proceedings of the Third International European Conference on the Use of Modern Information and Communication
Technologies (ECUMICT 2008), Ed. Luc de Backer, Nevelland v.z.w., Gent, Belgium, ISBN 9-789080782-553-6, pp. 183-195.
Vollath U, Buerchl A, Landau H, Pagels C, Wagner B (2000b). Long-
Range RTK Positioning Using Virtual Reference Stations, Proceedings of ION GPS 2000, 13th International Technical Meeting of the Satellite Division of the Institute of Navigation, September
2000, Salt Lake City, Utah. Wubbena G, Bagge A, Schmitz M (2001). Network-Based Techniques
for RTK Applications, the GPS Symposium, GPS JIN 2001, GPS
Society, Japan Institute of Navigation, 14-16 Nov., Tokyo, Japan.