Embed Size (px)
Citation preview

ARTICLE IN PRESS
Ocean Engineering 33 (2006) 1796–1813
0029-8018/$ -
doi:10.1016/j
�CorrespoE-mail ad
www.elsevier.com/locate/oceaneng
A combined numerical–empirical method tocalculate finite-time Lyapunov exponents
from experimental time series with applicationto vessel capsizing
Leigh McCuea,�, Armin Troeschb
aAerospace and Ocean Engineering, Virginia Tech, Blacksburg, VA 24061, USAbNaval Architecture and Marine Engineering, University of Michigan, USA
Received 16 May 2005; accepted 21 September 2005
Available online 24 January 2006
Abstract
This paper presents a method to calculate finite-time Lyapunov exponents (FTLEs) for
experimental time series using numerical simulation to approximate the local Jacobian of the
system at each time step. This combined numerical–experimental approach to the calculation
of FTLE is applicable to any physical system which can be numerically approximated. By way
of example, the method is applied to the problem of vessel capsize.
r 2005 Elsevier Ltd. All rights reserved.
Keywords: Finite-time Lyapunov exponents; Capsize; Jacobian
1. Introduction
The strong sensitivity of vessel capsizing to initial conditions has been a subject ofresearch for decades (Paulling and Rosenberg, 1959; Thompson, 1997; Spyrou andThompson, 2000; Lee et al., 2006). This sensitivity is an inherent sign of a chaoticsystem (Theiler, 1990), therefore an intuitive approach to the quantitative study of
see front matter r 2005 Elsevier Ltd. All rights reserved.
.oceaneng.2005.09.008
nding author. Tel.: +1540 231 4351; fax: +1 540 231 9632.
dress: [email protected] (L. McCue).

ARTICLE IN PRESS
L. McCue, A. Troesch / Ocean Engineering 33 (2006) 1796–1813 1797
capsize is to employ Lyapunov exponents. The Lyapunov exponent is a measure ofthe rate of convergence or divergence of nearby trajectories with positive valuesindicating exponential divergence and chaos. However, Lyapunov exponents are bydefinition an asymptotic parameter, whereas capsize is a finite-time phenomena.Therefore, finite-time Lyapunov exponents (FTLE) must be used to investigatebehaviors leading to capsize. To yield insight applicable to realistic vessels, a feasibleand physical method to calculate FTLE from experimental time series incombination with a simplified numerical model is presented.
The use of Lyapunov exponents to study capsize has been touched upon in theliterature for both naval architecture and nonlinear dynamics. In recent years, theasymptotic Lyapunov exponent has been calculated from equations of motion forthe mooring problem (Papoulias, 1987), single-degree-of-freedom capsize models(Falzarano, 1990; Murashige and Aihara, 1998a,b; Murashige et al., 2000; Arnoldet al., 2003), and works studying the effects of rudder angle while surf-riding as it leadsto capsize (Spyrou, 1996). Additionally, the authors conducted a study of the use ofLyapunov exponents to investigate large amplitude vessel roll motions in beam seas fora multi-degree of freedom numerical model in comparison to experimental results(McCue, 2004; McCue and Troesch, 2004). Based upon the results of this study, it wasshown that the Lyapunov exponent can be used as a validation tool for large amplituderoll motion simulators. Through calculation of similar maximal Lyapunov exponent forexperimental runs and numerically simulated runs, one can conclude that the numericalsimulator likely captures the relevant, multi-dimensional physics of the problem.However, since the Lyapunov exponent is defined in the limit as time approachesinfinity, it is ineffective for the study of the finite-time phenomena of capsize. This servesas the motivation for the present work in which capsize is studied using the finite-timemeasure given by the FTLE.
In order to be of use on-board a vessel and to make a sizeable improvement insafety, it is necessary to compute FTLEs from actual vessel time series in real time.While it is not impossible to approximate FTLEs through statistical methods (Lu,1997; Lu and Smith, 1997) or approaches derived from those used for Lyapunovexponents (Wolff, 1992; Yao and Tong, 1994; Sano and Sawada, 1985), it ispreferable for this research that the Jacobian approximation be calculated rapidlyand in such a manner as to be physically intuitive. For a system such as the capsizemodel discussed herein, a numerical approximation for the Jacobian is readilyavailable via a simulation tool. Therefore, to estimate the FTLEs for theexperimental time series, a combined numerical–experimental approach is used.
Rather than using statistical or dimensionally limited methods to approximate theJacobian of the system in time, a validated numerical simulator can be used to modelthe Jacobian in an incremental manner. For example, if given a time series fromexperimental data, and a numerical simulator capable of accurately integrating theequations of motion for an approximation of the system, one can use the simulatorin a stepwise manner to estimate the Jacobian about each point in the experimentaltime series. For the system discussed in this paper, six-state variables are recorded in1/30th of a second increments. Reading into the numerical simulator a row ofexperimental data containing these six-state variables, and integrating the linearized

ARTICLE IN PRESS
L. McCue, A. Troesch / Ocean Engineering 33 (2006) 1796–18131798
form of the equations of motion over the following 1/30th of a second incrementyields the Jacobian of the system and from that the FTLE at each step in time. Theexperimental values of the six-state variables are therefore treated incrementally asinitial conditions in the numerical simulation. Details of the numerical simulator,experimental data, and methodology are contained in the following section.
As an aside, the use of Lyapunov exponents should not be confused withLyapunov’s direct method. Lyapunov’s direct method is an analytical stabilityapproach studied heavily for the capsize problem by Odabasi and collaborators inthe 1970s–1980s (Kuo and Odabasi, 1975; Odabasi, 1976, 1982). An overview of thismethod is also given more recently by Fossen (1994). Spyrou and Thompson (2000)note that at the time Odabasi published his ideas on the use of Lyapunov functions,Odabasi’s work was possibly too mathematical for common acceptance in the navalarchitecture community. It is the opinion of the authors that such mathematicalapproaches paved the way for ongoing work in the field of naval architecture usingnonlinear dynamics theory and various mathematical tools through the 1990s andearly 21st century. This includes, but is not limited too, works by Arnold et al.(2003), Chen and Shaw (1997), Chen et al. (1999), Falzarano (1990), Falzarano et al.(1992), Nayfeh (1988), Bikdash et al. (1994), Soliman and Thompson (1991), Spyrou(1996), Spyrou and Thompson (2000), Spyrou et al. (2002), Thompson et al. (1987),as well as the authors, McCue and Troesch (2004) and McCue (2004).
2. Background
Determination of the Lyapunov exponent from a numerical simulation isrelatively straightforward with the primary non-trivial detail arising from accuratelyfinding the linearized form of the equations of motion about each point in thesimulation. For a system of equations written in state–space form _x ¼ uðxÞ, smalldeviations from the trajectory can be expressed by the equation d _xi ¼ ðqui=qxjÞdxj
(Eckhardt and Yao, 1993). dx is a vector representing the deviation from thetrajectory with components for each state variable of the system. Using thisJacobian, the Lyapunov exponent, defined by Eq. (1), can be calculated through aseries of progressive Gram–Schmidt re-orthonormalizations which are then summedin Eq. (2) in which ‘m’ represents the number of renormalization steps conducted and‘L’ denotes the length of each element (Wolf et al., 1985; Wolf, 1986).
l1 ¼ limt!1
1
tlogkdxðtÞkkdxð0Þk
, (1)
ðl1Þm ¼1
t
Xm
j¼1
logLðtjþ1Þ
LðtjÞ. (2)
Numerous algorithms are developed for calculating the Lyapunov exponent for anexperimental time series. In the foundation work comparing the Lyapunov exponentfor numerical and experimental non-capsize large amplitude roll motion data, thetangent space Sano and Sawada (1985) method included in the TISEAN (Hegger

ARTICLE IN PRESS
L. McCue, A. Troesch / Ocean Engineering 33 (2006) 1796–1813 1799
et al., 2000) package was used to calculate Lyapunov exponents for the experimentaltime series. Mean values for the maximal Lyapunov exponent of non-capsizeruns for the numerical simulation and experimental data were found to be 1.77 and1.57 1/s, respectively (McCue, 2004; McCue and Troesch, 2004). This level ofcomparison is the basis for the conclusion that the numerical model likely capturesthe relevant multi-dimensional physics of the experiments.
The FTLE from ordinary differential equations is calculated in much the samemanner as the Lyapunov exponent. The ‘n’ sets of differential equations linearizedabout the fiducial trajectory are calculated to measure incrementally stretching andshrinking principal axes. The ‘n’ linearized sets, where ‘n’ is the dimension of thephase space, are reorthonormalized after each step in the same manner as conductedfor the asymptotic Lyapunov exponent. Eq. (3), which gives the definition of theFTLE is discretely represented by Eq. (4) (Eckhardt and Yao, 1993). Calculation ofFTLE in using solely the numerical model demonstrates the usefulness of this finite-time quantity for detecting chaotic behaviors of the capsizing system (McCue andTroesch, 2004). Yet it is of use to be able to calculate FTLE from experimental timeseries both to yield greater insight into the dynamics of the system as well as toenable the development of real-time predictive tools.
lT ðxðtÞ; dxð0ÞÞ ¼1
Tlogkdxðtþ TÞk
kdxðtÞk, (3)
l1ðxðtÞ;DtÞ ¼1
Dtlog
Lðtþ DtÞ
LðtÞ. (4)
Brief details of the numerical and experimental models are contained in thefollowing two subsections. For further detail refer to Obar et al. (2001), Lee et al.(2006) or McCue and Troesch (2003).
2.1. Experimental setup
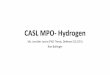
One hundred sixty-five separate experiments were conducted in which a box barge wasexcited in beam seas. The experiments were conducted by Obar et al. (2001) in the GravityWave Facility (35m long, 0.75m wide, and 1.5m deep) at the University of MichiganMarine Hydrodynamics Lab. A schematic is shown in Fig. 1. Those tests effectivelymodeled a three-degree-of-freedom (sway, heave, and roll) two-dimensional freely floating
x
y
x9
y9
φ
Fig. 1. Coordinate system for capsize model.

ARTICLE IN PRESS
Fig. 2. Sketch of barge with dimensions (Obar et al., 2001).
L. McCue, A. Troesch / Ocean Engineering 33 (2006) 1796–18131800
rectangle with water on deck. The model used for the primary experiments was a simplebox barge. Mounted on an aluminum platform were two infrared lights used to track themodel via a Matlab motion collection system. The motions were determined by analyzingthe locations of the infrared lights in time relative to fixed references as well as the locationof the wave relative to the center of gravity of the body. The model had principledimensions as follows: length, 66.0 cm; draft, 18.25 cm; freeboard, 1.12 cm; angle ofvanishing stability yv, 11:4� (see Fig. 2). The deck became awash when the hull heeledapproximately 5�, port or starboard. Within certain critical wave amplitude and frequencyranges, the states of capsize or non-capsize were functions of how and when the modelwas released, therefore demonstrating a strong sensitivity to initial conditions. See Table 1for numerical values of all coefficients. For further details of the experimental process referto Obar et al. (2001) or Lee et al. (2006).
2.2. Numerical model
A quasi-nonlinear time domain simulation is used to predict capsizing behavior ofa two-dimensional rectangular body. The model accounts for the hydrostatic effectsof water on deck, including deck immersion and bottom emersion, time-dependentroll righting arm and submerged volume, and an effective gravitation field whichaccounts for centrifugal forces due to the circular particle motion. The model islimited in that it makes use of a long-wave assumption and added mass and dampingvalues are calculated from a linear seakeeping program, SHIPMO (Beck andTroesch, 1990), at a fixed frequency. While this long-wave model is admittedlysimplistic, it captures the essence of quasi-static water on deck and extreme roll angledynamics. The model has the significant benefit of being computationally efficientallowing for extensive searches of the parameter space. For details into thismethodology and assumptions, see Lee (2001) and Lee et al. (2006). The equations ofmotion for this numerical model in the inertial coordinate system are written belowin Eq. (5) where subscripts of 2, 3, and 4 represent sway, heave, and roll degrees offreedom, respectively.

ARTICLE IN PRESS
Table 1
Definition of coefficients
Coefficients for numerical model from SHIPMO Experimentally determined coefficients
m 52.31 kg/m Tn 2.75 s
a22=m 0.3481 T0=Tn 1/3
a24=ðmBÞ 0.0262 l 1.32m
a33=ðmÞ 0.8091 B=l 0.23
a42=ðmBÞ 0.0262 T=l 0.137
a44=ðmB2Þ 0.0467 fb=l 0.0084
I cg=ðmB2Þ 0.1338
b22=ðmoÞ 1.1719
b24=ðmoBÞ 0.0101
b33=ðmoÞ 0.1628
b42=ðmoBÞ 0.0101
b1=ðmoB2Þ 0.0406
b2=ðmB2Þ 0.0830
jf D2 j=ðmgz0Þ 0.9227
jf D3 j=ðmgz0Þ 0.5304
jf D4 j=ðmgBz0Þ 0.1764
L. McCue, A. Troesch / Ocean Engineering 33 (2006) 1796–1813 1801
mþ a22 0 a24
0 mþ a33 0
a42 0 I cg þ a44
2664
3775
€xg
€yg
€f
0BB@
1CCAþ
b22 0 b24
0 b33 0
b42 0 b1
2664
3775
_xg
_yg
_f
0BB@
1CCA
þ
0 0 0
0 0 0
0 0 b2
2664
3775
0
0
_fj _fj
0BB@
1CCA ¼
rge2r þ f D2
rge3r�mgþ f D
3
rge4GZr þ f D4
0BBB@
1CCCA. ð5Þ
An explanation of terms is as follows (see Table 1 for numerical values):
aij , bij:
added mass and damping coefficientsf Dj :
diffraction forcesb1 and b2:
linear and nonlinear roll damping coefficients gei:
time-dependent sway and heave components of effective gravityxg:
sway position of the center of gravityyg:
heave position of the center of gravityf:
roll angle r: time-dependent volume of hull including possibility for deckimmersion and bottom emersion
GZ: time-dependent roll righting armThe values of GZ, r, and ge are numerically determined for each time step.Therefore they implicitly depend on variations in the motion variables; for example

ARTICLE IN PRESS
L. McCue, A. Troesch / Ocean Engineering 33 (2006) 1796–18131802
an instantaneous change in heave alters the calculated submerged volume and centerof buoyancy. In this sense the model allows for nonlinearities in sway and heave. Inregard to the roll equation specifically, rge4r represents a moment due to thenonlinear hydrostatic force and Froude–Krylov exciting force, i.e. rge4r ¼ r�
ðrgerÞ (Lee, 2001). The experimentally validated, ‘blended’ model of Eq. (5)simulates hours of data in seconds allowing one to generate years of real-time data ina matter of days (McCue and Troesch, 2003; Lee et al., 2006).
Calculating the Jacobian of the equations of motion used in the numerical simulator(Obar et al., 2001; McCue and Troesch, 2003; Lee et al., 2006), given by Eq. (5) isrelatively straight forward, though a few aspects are worthy of discussion as follows.While the mass and linear damping terms are easily treated, the quadratic damping andforcing terms require extra consideration. Two approaches to treat the quadratic dampingterm are as follows. One method is to replace, in the linearized model, the term _fj _fj with_f2 for _f40,� _f2 for _fo0, and assume that the precise singularity at _f ¼ 0 will never beencountered due to double precision computational accuracy. The second approach is touse Dalzell (1978) treatment for quadratic damping. Dalzell (1978) fits an odd function
series of the form _fj _fj ¼P
k¼1;3;...akð_fk= _f
k�2
c Þ. Solving for ak the truncated third-order
fit becomes _fj _fj � 516_f _fc þ
3548ð _f3= _fcÞ over some range � _fco _fo _fc (Dalzell, 1978).
Basic testing indicated both treatments yield similar results, therefore the Dalzelltreatment, with _fc ¼ 10 degrees, was used for the results presented herein to avoid anydifficulties due to the singularity associated with the first method.
The linearized influence of the forcing side of the equation is calculated using asimple difference scheme. Forces are calculated as the difference between their valueson the fiducial trajectory and their values at the offset from the trajectory. Due tolinear superposition this can be calculated in a more computationally efficientmanner for the differential at ðxþ dx; yþ dy;fþ df; tÞ rather than conducting thesummation of force differentials at ðxþ dx; y;f; tÞ, ðx; yþ dy;f; tÞ, andðx; y;fþ df; tÞ. Therefore, the linearized form of the equations of motion aboutthe fiducial trajectory are written as Eq. (6).
mþ a22 0 a24
0 mþ a33 0
a42 0 I cg þ a44
2664
3775
d €xg
d €yg
d €f
0BB@
1CCA
þ
b22 0 b24
0 b33 0
b42 0 b1 þ b2ð516_fc þ
3516
_f2
_fc
Þ
26664
37775
d _xg
d _yg
d _f
0BB@
1CCA
¼
rge2rþ f D2
rge3r �mgþ f D3
rge4GZrþ f D4
0BBB@
1CCCAðxþdx;yþdy;fþdf;tÞ
�
rge2r þ f D2
rge3r�mgþ f D
3
rge4GZr þ f D4
0BBB@
1CCCAðx;y;f;tÞ
. ð6Þ

ARTICLE IN PRESS
L. McCue, A. Troesch / Ocean Engineering 33 (2006) 1796–1813 1803
From this linearized form of the equations of motion the Lyapunov exponent andFTLE can be calculated for the numerical simulation from Eqs. (2) and (4),respectively, with results presented in McCue and Troesch (2004).
3. Finite-time Lyapunov exponents (FTLE) from experimental time series
McCue and Troesch (2004) presented calculations of asymptotic Lyapunovexponents from experimental results used in comparison to calculations ofasymptotic Lyapunov exponents from numerical simulation. Specifically, considera-tion of non-capsize runs were used to demonstrate that the numerical model capturesthe physics of the experimental results as demonstrated by similar magnitude ofmaximal asymptotic Lyapunov exponent. Since the asymptotic Lyapunov exponentis defined in the limit as time approaches infinity, in McCue and Troesch (2004)FTLE based upon the definition in Eq. (3) are calculated from numerical simulationto lend insight into the finite-time phenomena of capsize. This paper extendsthe method described in McCue and Troesch (2004) to incorporate input ofexperimental time series into the numerical model to calculate a FTLE fromexperimental results coupled with numerical simulation.
3.1. Theory and implementation
As discussed by Eckhardt and Yao (1993), it is relatively simple to calculate aFTLE from simulation of the equations of motion of the system. Calculation of theFTLE using solely the numerical model demonstrates the usefulness of this finite-time quantity for detecting chaotic behaviors of the capsizing system (McCue andTroesch, 2004). In McCue and Troesch (2004), comparison of numerically andexperimentally calculated asymptotic Lyapunov exponents for non-capsize runs wasused to argue that the numerical model presented in Eq. (5) likely captures therelevant underlying physics of the experimental problem. It is of use to be able tocalculate FTLE from experimental time series both to yield greater insight into thedynamics of the system as well as to enable the development of real-time capsizeprediction tools. Therefore, the numerical model was used in conjunction with theexperimental time series to calculate the FTLE.
In the experiments described in the previous section, data was measured at a rateof 30 frames per second. To calculate the FTLE, the values of each of the six-state–space variables of roll, roll velocity, sway, sway velocity, heave, and heavevelocity, are entered into the numerical simulator. The equations of motion, alongwith the linearized form of the equations of motion are then integrated over the next1/30th of a second to measure the rate of expansion or contraction of the principalaxes of the infinitesimal six-dimensional sphere anchored to the fiducial trajectorydefined by the experimental data. At the end of the 1/30th of a second integrationstep, the FTLE is calculated and new state variables are read into the simulationbased upon the experimental time series. Therefore, the entire time series is read intothe numerical simulator with the equations of motion simulated in 1/30th of a second

ARTICLE IN PRESS
L. McCue, A. Troesch / Ocean Engineering 33 (2006) 1796–18131804
intervals between experimental data points in order to yield values for FTLE definedby a combination of experimental data and numerical simulation.
This is a fairly intuitive approach for engineering applications emulating realphenomena. However, the limitation of this approach is the inherent bias imposedupon the output data by the numerical model; using this methodology the dynamicsinherent to the numerical simulator are also introduced. For this reason, it is of theutmost importance to verify that the numerical model appears to encompass thephysics of the underlying chaotic system through qualitative comparison (McCueand Troesch, 2003; Lee et al., 2006) and quantitative validation calculations of theasymptotic Lyapunov exponent for a long, or, asymptotic benchmark. For thisexample the benchmark cases were those of large amplitude rolling motions notleading to capsize (McCue and Troesch, 2004). The benefit to this methodology is inits potential application for the prediction of real-time full-scale vessel motions andinstabilities.
0 5 10 15 20 25 30 35 40 45 50-20
0
20
40
60
Time (s)
Rol
l Ang
le (
deg) θ
0=0.1030, dθ
0/dt=0.7577
θ0=0.0218, dθ
0/dt=2.6327
0 5 10 15 20 25 30 35 40 45 50-5
0
5
10
Time (s)
Sho
rt ti
me
λ 1 (1/
s) θ0=0.1030, dθ
0/dt=0.7577
θ0=0.0218, dθ
0/dt=2.6327
25 26 27 28 29 30 31 32 33 34 35
-2
0
2
4
6
Time (s)
Sho
rt ti
me
λ 1 (1/
s) θ0=0.1030, dθ
0/dt=0.7577
θ0=0.0218, dθ
0/dt=2.6327
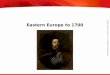
Fig. 3. FTLE as a function of time for nearby capsize and non-capsize experimental cases released at time
t ¼ 21:5667 s. Top panel shows roll experimental time series. Middle panel shows full time series for FTLE
from t ¼ 0 to 48.9 s. Bottom panel shows identical data over critical region from t ¼ 25 to 35 s. Initial roll
and roll velocity for non-capsize and capsize runs equal to (0.1030deg, �0:7577 deg =s), (0.0218deg,�2:6327 deg =s), respectively.

ARTICLE IN PRESS
L. McCue, A. Troesch / Ocean Engineering 33 (2006) 1796–1813 1805
To use in an on-board sense, a combination of a real-time calculator with anumerical simulator could enable development of a numerical–empirical-typeapproach in which at every time step a FTLE is calculated and fed back into anumerical simulator along with the latest vessel parameters. Using a simulator thatruns substantially faster than real time, such as that presented by the equations ofmotion 5, a system could be developed for detecting and warning of instabilities invessel motions in real time on-board a ship. Similarly, this could be developed forany physical system which can be numerically modeled. The following subsectionpresents results demonstrating the potential for this form of application.
3.2. Results
Consider Fig. 3 showing time series for nearby capsize and non-capsizeexperimental trajectories. The top panel presents roll time series for two caseswhich exhibit strong similarities up to capsize. There is no distinct phase difference inthe motions as both roll trajectories are nearly identical until capsize. The middle
30 30.5 31 31.5 32 32.5 33-1
-0.5
0
0.5
1
Time (s)
Sho
rt ti
me
λ 1 (1/
s)
Non-capsize runs
30 30.5 31 31.5 32 32.5 33-1
-0.5
0
0.5
1
Time (s)
Sho
rt ti
me
λ 1 (1/
s)
Capsize runs
Fig. 4. FTLE as a function of time for all runs released at time t ¼ 21:5667 s. Viewed over typical region
from t ¼ 30 to 33 s. Top panel shows 6 time series leading to non-capsize. Bottom panel shows 8 time series
leading to capsize. Initial conditions for all 14 time series in six-state variables are given in Table 2.

ARTICLE IN PRESS
L. McCue, A. Troesch / Ocean Engineering 33 (2006) 1796–18131806
panel shows time series for the FTLE for the same neighboring cases generated usingthe combined numerical/experimental approach discussed in the previous subsection.The bottom panel gives the same data as the middle panel over the critical timeregion between 25 and 35 s. The FTLE, which is sensitive to the influence of all statevariables, shows a phase difference between the two experimental time series. Thisserves as a means to demonstrate the six-dimensional phase space on a single-dimensional plane. As is apparent on the bottom panel, the non-capsize run leads thecapsize FTLE time series in phase.
In the experiments, slight phase variations in all degrees of freedom can result indramatically different end results. A sensitivity to initial conditions is a fundamentalcharacteristic of a chaotic system; therefore, while the complicated dynamics of six-dimensional phase space are not discernable graphically, it is the hope that throughfurther exploration of FTLE from experimental time series, a means to capturemulti-dimensional effects in a single representation will be apparent. In Fig. 4, as inthe bottom panel of Fig. 3, the FTLE for 14 runs, 6 non-capsize and 8 capsize, areplotted as a function of time. All 14 runs are released at the same time with differentinitial conditions given in Table 2. The phase of the FTLE for runs leading to capsizelag the phase of the FTLE for non-capsize runs. The time series are abridged over theperiod from t ¼ 30 to 33 s for visual clarity though this lag behavior is consistentthroughout the time series.
A brief investigation of all 165 experimental runs is presented in Figs. 5–7. It canbe seen that in the time leading to capsize, those time series leading to capsize oftenlead or lag the majority of the non-capsize runs released at the same initial time.However, the distinctiveness and duration over which this lead/lag behavior occurs
Table 2
Initial conditions for runs plotted in Fig. 4
Roll (deg) Roll vel. (deg/s) Sway (ft) Sway vel. (ft/s) Heave (ft) Heave vel. (ft/s)
Non-capsize runs
0.1031 �0.7577 �0.0067 0.0249 �0.0024 �0.0053
5.5984 0.6918 0.0041 0.0196 �0.0040 0.0008
5.3675 �5.5190 0.0020 0.1832 0.0015 0.0150
5.3509 �3.7013 �0.0099 �0.2502 �0.0008 0.0484
�6.3478 0.9998 �0.0598 �0.1150 �0.0053 0.0436
�5.9708 �3.7300 �0.0162 0.0859 �0.0074 �0.0220
Capsize runs
0.0218 �2.6327 0.0110 �0.2933 0.0016 0.0670
11.9834 �1.1502 0.0041 0.0046 �0.0039 �0.0044
12.0997 1.0671 �0.0009 0.0116 �0.0027 �0.0089
11.7835 �0.0043 0.0008 �0.1796 �0.0012 0.0686
�5.8264 �1.6387 �0.0378 �0.2412 �0.0072 0.0913
�11.4815 �2.6542 �0.0104 �0.3606 0.0038 0.1514
�11.6626 �5.6594 �0.0182 �0.1152 �0.0000 �0.0144
�11.0902 �0.7792 0.0043 �0.7368 0.0045 0.2163
All runs released at time t ¼ 21:5667 s.

ARTICLE IN PRESS
L. McCue, A. Troesch / Ocean Engineering 33 (2006) 1796–1813 1807
varies significantly. An area of future study is to conduct a more thoroughexamination of the lead/lag behavior between non-capsize and capsize runs atmultiple release times and realistic hull geometry to determine if a consistent andquantifiable predictive measure can be distinguished.
Unlike the asymptotic Lyapunov exponent where magnitude is used to verify thedetection of the proper physics of the system, magnitude is a relatively trivial featurewhen considering a FTLE since it is dependent on the size of the time interval overwhich the finite exponent is calculated. The greater source of information lies in therelative behavior between different experiments of similar design. It is apparent inFig. 8 that through this combined numerical–experimental approach the peak FTLEfor non-capsize cases is significantly smaller, with a narrower standard deviation,then the capsize cases. With further research, it is hoped that the detection of thesepeaks prior to capsizing and/or any potential consistent phase differences, are whatwill enable the use of FTLE as a predictive tool for the detection of capsize.
Lastly, Fig. 9 illustrates the time period in which capsize occurs after encounteringthe largest finite-time Lyapunov exponent. The majority of cases capsize within
25 26 27 28 29 30 31 32 33 34 35-2
0
2
Sho
rt ti
me
λ 1 (1/
s)
25 26 27 28 29 30 31 32 33 34 35-2
0
2
Sho
rt ti
me
λ 1 (1/
s)
25 26 27 28 29 30 31 32 33 34 35-2
0
2
Sho
rt ti
me
λ 1 (1/
s)
25 26 27 28 29 30 31 32 33 34 35-2
0
2
Time (s)
Sho
rt ti
me
λ 1 (1/
s)
Fig. 5. FTLE as a function of time for all runs released at 21.3667 s (top), 21.5667 s (upper middle),
21.7667 s (lower middle), and 22.0333 s (bottom). Capsize runs denoted with dotted lines, non-capsize solid
lines. Viewed over typical region from t ¼ 25 to 35 s.

ARTICLE IN PRESS
25 26 27 28 29 30 31 32 33 34 35-2
0
2
Sho
rt ti
me
λ 1 (1/
s)
25 26 27 28 29 30 31 32 33 34 35-2
0
2
Sho
rt ti
me
λ 1 (1/
s)
25 26 27 28 29 30 31 32 33 34 35-2
0
2
Sho
rt ti
me
λ 1 (1/
s)
25 26 27 28 29 30 31 32 33 34 35-2
0
2
Time (s)
Sho
rt ti
me
λ 1 (1/
s)
Fig. 6. FTLE as a function of time for all runs released at 22.2333 s (top), 22.4333 s (upper middle),
22.6333 s (lower middle), and 22.8333 s (bottom). Capsize runs denoted with dotted lines, non-capsize solid
lines. Viewed over typical region from t ¼ 25 to 35 s.
L. McCue, A. Troesch / Ocean Engineering 33 (2006) 1796–18131808
one-wave cycle of the maximum finite-time Lyapunov exponent. This is likelybecause the low-freeboard vessel studied inherently capsizes rapidly. However, evenfor this simplistic example, some advance warning of instability is given via peaks ofthe finite-time Lyapunov exponent time series. Through use of the finite-timeLyapunov exponent as an indicator of instability, even in short time periods, someform of corrective measure can be undertaken. It is anticipated that through furtherstudies on more realistic ship models, consistent phase and/or peak behavior willlead to an indicator that can be used to warn captains of impending danger withsufficient time to allow corrective measures.
4. Conclusions
While the Lyapunov exponent is of use for long-time series, such as those notleading to capsize, for a finite event, such as capsize, a finite-time Lyapunov

ARTICLE IN PRESS
25 26 27 28 29 30 31 32 33 34 35-2
0
2
Sho
rt ti
me
λ 1 (1/
s)
25 26 27 28 29 30 31 32 33 34 35-2
0
2
Sho
rt ti
me
λ 1 (1/
s)
25 26 27 28 29 30 31 32 33 34 35-2
0
2
Sho
rt ti
me
λ 1 (1/
s)
25 26 27 28 29 30 31 32 33 34 35-2
0
2
Time (s)
Sho
rt ti
me
λ 1 (1/
s)
Fig. 7. FTLE as a function of time for all runs released at 23.0667 s (top), 23.2667 s (upper middle), 23.5 s
(lower middle), and 23.7 s (bottom). Capsize runs denoted with dotted lines, non-capsize solid lines.
Viewed over typical region from t ¼ 25 to 35 s.
L. McCue, A. Troesch / Ocean Engineering 33 (2006) 1796–1813 1809
exponent (FTLE) is necessary. Further development of the real-time numerical–ex-perimental FTLE approach presented in this paper could establish the method’spotential for realistic vessel dimensions and hull forms in addition to countless otherchaotic applications. A combined numerical–experimental method for calculatingFTLE from an experimental time series is a viable method for physical systemswhich can be reasonably accurately modeled by numerical integration of equationsof motion. An important check of the validity of the model is comparison of theLyapunov exponent for long-time simulations to ensure that the model does not failto capture the relevant physics of the real system. Since the Lyapunov exponent isa system parameter indicating the rate of chaotic behavior it can be used incomparison between experimental and numerical runs to validate the physics of anumerical model thus justifying the use of a combined numerical–empiricalapproach for the FTLE which is both intuitive and dimensionally unlimited.
From the calculation of the FTLE further system information is gained throughthe capture of information in all six-state variables. This information could

ARTICLE IN PRESS
0 5 10 15 20 250
2
4
6
8
10
Maximum short time Lyapunov exponent for experimental capsize time series (1/s)
Occ
urre
nces
Mean=4.5425, σ=3.021
0 5 10 15 20 250
20
40
60
80
100
Maximum short time Lyapunov exponent for experimental non-capsize time series (1/s)
Occ
urre
nces
Mean=1.6395, σ=2.67
Fig. 8. Histograms indicating range of FTLE values for runs leading to capsize and non-capsize based
upon experimental data.
L. McCue, A. Troesch / Ocean Engineering 33 (2006) 1796–18131810
potentially be used in a predictive tool to indicate lost stability leading to capsize. Aphase relationship was also detected between the FTLE of capsize and non-capsizeruns for a small sampling of 165 time series. Greater investigation into this isnecessary to determine if phasing could be used to predict capsize prior to a spike inFTLE time series. More work must be done to further identify the different types ofcapsize as characterized by small and large FTLE and the relationship between thephasing of non-capsize and capsize FTLE time series. Extending the principals andsimulation tools presented in this paper towards time series for realistic vessels inrandom seas would provide useful data and could serve as a beneficial proof ofconcept.
This work demonstrates preliminary data indicating that an on-board simulationtool paired with a predictive device such as the finite-time Lyapunov exponent canprovide real-time warnings of chaotic behavior with the express purpose of savingcargo, ships, and lives. Further studies could quantify phase relations betweencapsize and non-capsize time series and/or define a practical and consistent means todetect peaks in the FTLE time series.

ARTICLE IN PRESS
0 1 2 3 4 5 60
5
10
15
20
Cycles from instant of maximum short time Lyapunov exponent to capsize
Max
imum
sho
rt ti
me
Lyap
unov
exp
onen
t (1/
s)
0 2 4 6 8 10 12 14 160
5
10
15
20
Cycles from instant of release to capsize
Max
imum
sho
rt ti
me
Lyap
unov
exp
onen
t (1/
s)
Fig. 9. (top) Peak value of largest local Lyapunov exponent as a function of the number of cycles from
peak exponent to capsize based upon experimental data. (bottom) Peak value of largest local Lyapunov
exponent as a function of the number of cycles from release to capsize based upon experimental data.
L. McCue, A. Troesch / Ocean Engineering 33 (2006) 1796–1813 1811
Acknowledgments
The authors wish to express their gratitude for funding on this project from theDepartment of Naval Architecture and Marine Engineering at the University ofMichigan and the National Defense Science and Engineering Graduate Fellowshipprogram. Additionally, the authors acknowledge Dr. Young-Woo Lee for the initialdevelopment of the numerical simulator used in this paper as well as the work ofLt. Michael Obar and Dr. Young-Woo Lee in conducting the experiments analyzedin this work.
References
Arnold, L., Chueshov, I., Ochs, G., 2003. Stability and capsizing of ships in random sea—a survey.
Technical Report 464, Institut fur Dynamicsche Systeme, Universitat Bremen.
Beck, R.F., Troesch, A.W., 1990. Students’ Documentation and Users’ Manual for the Computer
Program SHIPMO.BM. Department of Naval Architecture and Marine Engineering, University of
Michigan, Ann Arbor.

ARTICLE IN PRESS
L. McCue, A. Troesch / Ocean Engineering 33 (2006) 1796–18131812
Bikdash, M., Balachandran, B., Nayfeh, A., 1994. Melnikov analysis for a ship with a general roll-
damping model. Nonlinear Dynamics 6, 101–124.
Chen, S.-L., Shaw, S.W., 1997. Phase space transport in a class of multi-degree-of-freedom systems.
In: Proceedings: DETC’97 1997 ASME Design Engineering Technical Conferences, September.
Chen, S.-L., Shaw, S.W., Troesch, A.W., 1999. A systematic approach to modeling nonlinear multi-dof
ship motions in regular seas. Journal of Ship Research 43 (1), 25–37.
Dalzell, J.F., 1978. A note on the form of ship roll damping. Journal of Ship Research 22 (3), 178–185.
Eckhardt, B., Yao, D., 1993. Local Lyapunov exponents in chaotic systems. Physica D 65, 100–108.
Falzarano, J.M., 1990. Predicting complicated dynamics leading to vessel capsizing. Doctoral
Dissertation, University of Michigan.
Falzarano, J.M., Shaw, S.W., Troesch, A.W., 1992. Application of global methods for analyzing
dynamical systems to ship rolling motion and capsizing. International Journal of Bifurcation and
Chaos 2 (1), 101–115.
Fossen, T.I., 1994. Guidance and Control of Ocean Vehicles. Wiley, New York.
Hegger, R., Kantz, H., Schreiber, T., et al., 2000. Tisean 2.1, nonlinear time series analysis. http://
www.mpipks-dresden.mpg.de/�tisean/TISEAN_2.1/index.html.
Kuo, C., Odabasi, A., 1975. Application of dynamic systems approach to ship and ocean vehicle stability.
In: Proceedings: International Conference on the Stability of Ships and Ocean Vehicles, March.
Lee, Y.-W., 2001. Nonlinear ship motion models to predict capsize in regular beam seas. Doctoral
Dissertation, Department of Naval Architecture and Marine Engineering, University of Michigan,
Ann Arbor, MI.
Lee, Y.-W., McCue, L., Obar, M., Troesch, A., 2006. Experimental and numerical investigation into the
effects of initial conditions on a three degree of freedom capsize model. Journal of Ship Research,
in press.
Lu, Z.-Q., 1997. Statistical estimation of local Lyapunov exponents: toward characterizing predictability
in nonlinear systems. http://www.geocities.com/zqjlu/tslle4.pdf. Preprint.
Lu, Z.-Q., Smith, R.L., 1997. Estimating local Lyapunov exponents. Fields Institute Communications 11,
135–151.
McCue, L.S., 2004. Chaotic vessel motions and capsize in beam seas. Doctoral Dissertation, University of
Michigan.
McCue, L.S., Troesch, A.W., 2003. The effect of coupled heave/heave velocity or sway/sway velocity
initial conditions on capsize modelling. In: Proceedings: Eighth International Conference on the
Stability of Ships and Ocean Vehicles, September.
McCue, L.S., Troesch, A.W., 2004. Use of Lyapunov exponents to predict chaotic vessel motions.
In: Proceedings: Seventh International Ship Stability Workshop, November.
Murashige, S., Aihara, K., 1998a. Coexistence of periodic roll motion and chaotic one in a forced flooded
ship. International Journal of Bifurcation and Chaos 8 (3), 619–626.
Murashige, S., Aihara, K., 1998b. Experimental study on chaotic motion of a flooded ship in waves.
Proceedings of the Royal Society of London A 454, 2537–2553.
Murashige, S., Yamada, T., Aihara, K., 2000. Nonlinear analyses of roll motion of a flooded ship in
waves. Philosophical Transactions of the Royal Society of London A 358, 1793–1812.
Nayfeh, A.H., 1988. On the undesirable roll characteristics of ships in regular seas. Journal of Ship
Research 32 (2), 92–100.
Obar, M.S., Lee, Y.-W., Troesch, A.W., 2001. An experimental investigation into the effects initial
conditions and water on deck have on a three degree of freedom capsize model. Fifth International
Workshop on the Stability and Operational Safety of Ships, Trieste, Italy, September.
Odabasi, Y., 1976. Ultimate stability of ships. Transactions of the Royal Institution of Naval Architects
119, 237–263.
Odabasi, Y., 1982. A morphology of mathematical stability theory and its application to intact ship
stability assessment. In: Proceedings: Second International Conference on Stability of Ships and Ocean
Vehicles, October.
Papoulias, F.A., 1987. Dynamic analysis of mooring systems. Doctoral Dissertation, Department of Naval
Architecture and Marine Engineering, University of Michigan, Ann Arbor, MI.

ARTICLE IN PRESS
L. McCue, A. Troesch / Ocean Engineering 33 (2006) 1796–1813 1813
Paulling, J., Rosenberg, R., 1959. On unstable ship motions resulting from nonlinear coupling. Journal of
Ship Research.
Sano, M., Sawada, Y., 1985. Measurement of Lyapunov spectrum from a chaotic time series. Physical
Review Letters 55 (10).
Soliman, M.S., Thompson, J., 1991. Transient and steady state analysis of capsize phenomena. Applied
Ocean Research 13 (2).
Spyrou, K., 1996. Homoclinic connections and period doublings of a ship advancing in quartering waves.
Chaos 6 (2).
Spyrou, K., Thompson, J., 2000. The nonlinear dynamics of ship motions: a field overview and some
recent developments. Philosophical Transactions of the Royal Society of London 1735–1760.
Spyrou, K., Cotton, B., Gurd, B., 2002. Analytical expressions of capsize boundary for a ship with roll
bias in beam waves. Journal of Ship Research 46 (3), 167–174.
Theiler, J., 1990. Estimating fractal dimension. Journal of the Optical Society of America A 7 (6).
Thompson, J., 1997. Designing against capsize in beam seas: recent advances and new insights. Applied
Mechanics Review 50 (5).
Thompson, J., Bishop, S., Leung, L., 1987. Fractal basins and chaotic bifurcations prior to escape from a
potential well. Physics Letters A 121 (3).
Wolf, A., 1986. Quantifying Chaos with Lyapunov Exponents, Chaos. Princeton University Press,
Princeton, NJ (Chapter 13).
Wolf, A., Swift, J., Swinney, H., Vastano, J., 1985. Determining Lyapunov exponents from a time series.
Physica D 16, 285–317.
Wolff, R.C., 1992. Local Lyapunov exponents: looking closely at chaos. Journal of the Royal Statistical
Society Series B 54 (2), 353–371.
Yao, Q., Tong, H., 1994. Quantifying the influence of initial values on non-linear prediction. Journal of
the Royal Statistical Society Series B 56 (4), 701–725.