Embed Size (px)
Citation preview

Available online at www.sciencedirect.com
Nuclear Engineering and Design 238 (2008) 250–273
A CFD approach to the atmospheric dispersion of radionuclidesin the vicinity of NPPs
Paulo A.B. de Sampaio ∗, Milton A.G. Junior, Celso M.F. Lapa
Programa de Pos-Graduacao em Ciencia e Tecnologia Nucleares, Instituto de Engenharia Nuclear/CNEN,CP 68550, CEP 21945-970, Rio de Janeiro, RJ, Brazil
Received 15 February 2007; received in revised form 29 May 2007; accepted 30 May 2007
Abstract
Most studies of atmospheric dispersion of radionuclides released from Nuclear Power Plants (NPPs) are based on Gaussian plume models or onthe use of a convection–diffusion equation. Such methods, which do not involve solving the flow problem, are useful in the atmospheric mesoscale,of the order of 2–2000 km from the NPP. However, they do not account for the turbulence generated by the interaction of the wind with obstacles andwith the released material stream, which are the dominant factors in the local scale, of the order of 0–2 km from the source of emission. Here, theauthors advocate the use of computational fluid dynamics (CFD) to study the dispersion problem. The physical model comprises the Navier–Stokesequations, a convection–diffusion energy equation, and transport equations for the radionuclides. The paper details the stabilized finite elementformulation used, stressing its connection with the variational multiscale/large eddy simulation approach. Adaptive techniques combining errorestimation and remeshing are also employed. The method is implemented on a Beowulf parallel computing system using domain decompositionand the message passing interface (MPI). Controlled emissions from a chimney and release from severe accidents have been simulated, showingthe importance of the local phenomena on the dispersion problem.© 2007 Published by Elsevier B.V.
1. Introduction
Under normal operational conditions, nuclear power plants (NPPs) release small quantities of radioactive effluents during theirlifetime (Lamarsh, 1975). In the unlikely event of a severe accident, such as a loss of coolant accident (LOCA) or nuclear excursionsin pressurized water reactors (PWRs), the successive failure of physical barriers, combined with failure of control and protectivereactor systems, can result in the release of radioactive material.
The importance of emergency preparedness has been recognized in the last two decades, particularly after the Chernobyl accident.Proper models and computational tools are needed in order to predict and assess radiological consequences for the public and theenvironment. Indeed, the purpose of studying the dispersion of radionuclides from a NPP is to obtain data for safety analysis, in orderto ensure that under normal operational conditions the radiological dose received by the public will be inferior to the level establishedby existing regulation, and, in the case of a severe accident, to provide the information required to evaluate its consequences.
The study of the release of radioactive effluents can be divided into four distinct phases. The first one concerns the evaluationof the inventory of the radioactive materials that exist inside the NPP, including their quantities and their physical, chemical andbiological properties. The second phase involves the study on the way these materials are released, after failure upon failure of thesuccessive barriers. The release to the atmosphere could occur through a chimney, in the case of a controlled emission, or throughruptured containment walls, in the unlikely event of a catastrophic accident. The third phase concerns the dispersion of the radioactivematerial to the environment. In the case of atmospheric dispersion, this must consider the behavior of the radioactive plume and theevaluation of the concentration of radionuclides around the NPP (Lamarsh, 1975). Finally, the fourth phase involves the computation
∗ Corresponding author.E-mail address: [email protected] (P.A.B. de Sampaio).
0029-5493/$ – see front matter © 2007 Published by Elsevier B.V.doi:10.1016/j.nucengdes.2007.05.009

P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273 251
of the dose received by members of the public and the environmental impact of the radioactive release. The dose and the associatedhealth effects depend both upon the half-life, energy and decay chain of the radionuclides, and upon the biological properties ofliving creatures (Lewis, 1977).
In this paper the authors propose the use of computational fluid dynamics (CFD) to the problem of atmospheric dispersion ofradioactive material in the vicinity of NPPs. Most studies of atmospheric dispersion of radioactive material released from NPPs arebased on Gaussian plume models or on the use of a convection–diffusion equation. Such models, which do not involve solving theflow problem, are inexpensive and can be useful in the atmospheric mesoscale (Orlanski, 1975), of the order of 2–2000 km from theNPP. However, they fail to take into account the turbulence generated by the interaction of the wind with buildings, the terrain, andwith the convective forces of the released material stream, which are the dominant factors in the local scale, of the order of 0–2 kmfrom the source of emission.
The CFD approach proposed herein employs a stabilized finite element formulation to approximate the solution of a physicalmodel that is based on the Navier–Stokes equations, coupled with an energy convection–diffusion equation for temperature, andtransport equations for the concentration of the released radionuclides. The stabilized finite element formulation can be interpretedas a variational multiscale (VMS) method (Hughes, 1995; Hughes et al., 1998, 2001; Gravemeier, 2006) whose application resultsin large eddy simulations (LES) with implicit subgrid modeling (Margolin and Rider, 2002; De Sampaio et al., 2004; Grinstein etal., 2005).
Although the theoretical framework presented applies to both 2D and 3D, in this work we confine ourselves to the implementationof the method in a 2D code. Clearly, there are limitations that are inherent to a 2D analysis when confronted to the more realistic 3Dcase. On the other hand, there are good reasons that justify at least an investigation on the use of the present method in a 2D setting.Firstly, the 2D analyses are conservative in the sense that the 2D model neglects diffusion of radionuclides from the 2D domainsused in the simulations (the radionuclides cannot leave the 2D plane used in the computation). Secondly, because the present CFDapproach is considerably more demanding in CPU time than the traditional methods, a 2D implementation represents a compromisethat permits introducing the local phenomena in the study, whilst limiting the overall cost of the analysis.
In Section 2 we describe the physical model considered. The stabilized finite element formulation used is presented in Section3, stressing the connection between the present method and the variational multiscale/large eddy simulation (VMS/LES) approach.As described in Section 4, the time advance of the solution is optimized using local time-steps that are adjusted according to thetime-scales of the dominant physical process. The code implementation, including adaptive remeshing and parallel programmingtechniques, is described in Section 5. In Section 6 we show numerical simulations that confirm the importance of the local phenomenaon the dispersion of radionuclides in the vicinity of NPPs. Finally, in Section 7, we draw our concluding remarks.
2. Physical model
We consider a continuum model for incompressible viscous flows including buoyancy forces and heat transfer. The model alsoincludes transport equations describing the concentration of radionuclides. The problem is defined on the open bounded domainΩ,with boundary Γ , contained in the nsd-dimensional Euclidean space.
The flow is modeled by the incompressible Navier–Stokes equations and a convection–diffusion energy equation. These arewritten in Cartesian co-ordinates using the summation convention for a = 1, . . ., nsd and b = 1, . . ., nsd:
ρ
[∂ua
∂t+ ub
∂ua
∂xb
]− ∂τab
∂xb+ ∂p
∂xa+ ρβga(T − T0) = 0 (1)
∂ua
∂xa= 0 (2)
ρc
[∂T
∂t+ ub
∂T
∂xb
]+ ∂qb
∂xb= 0 (3)
Without loss of generality we consider here two radionuclides. The first radionuclide is assumed to decay forming the secondradionuclide. The second radionuclide is considered either to be stable or having a half-life considerably larger than the duration ofthe analysis, so that its decay to a third species can be neglected. Let φ be the concentration of the first radionuclide and ϕ be theconcentration of the second one. The transport equations for φ and ϕ can be written as
∂φ
∂t+ ub
∂φ
∂xb+ ∂ξb
∂xb+ λφ = 0 (4)
∂ϕ
∂t+ ub
∂ϕ
∂xb+ ∂ηb
∂xb− λφ = 0 (5)
Apart from the concentrations φ and ϕ, the dependent variables are the velocity, pressure and temperature fields represented by ua,p and T, respectively. Note that the viscous stress is given by τab =μ((∂ua/∂xb) + (∂ub/∂xa)), where μ is the fluid viscosity. The heat

252 P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273
flux is given by qb = −κ(∂T/∂xb), where κ is the fluid thermal conductivity. The diffusive fluxes of φ and ϕ are given by Fick’s law asξb = −Ψ (∂φ/∂xb) and ηb = −ζ(∂ϕ/∂xb), respectively, where Ψ and ζ are the corresponding molecular diffusivities. The fluid specificheat at constant pressure is represented by c. The fluid density (at the reference temperature T0) is denoted by ρ. The volumetricexpansion coefficient of the fluid is β = −ρ−1(∂ρ/∂T). The parameter λ characterizes the rate of decay of the first radionuclide.
The model is completed introducing boundary conditions and initial velocity, temperature and concentration fields. Velocityand traction boundary conditions are prescribed by given data on non-overlapping boundary partitions Γ ua and Γ ta, such thatΓ ua ∪Γ ta =Γ , according to:
ua = ua(x, t), x ∈Γua (6)
(−pδab + τab)nb = ta(x, t), x ∈Γta (7)
where δab is the Kronecker delta and nb denotes the Cartesian components of the outward normal vector at the boundary.Temperature and heat flux boundary conditions are prescribed by given data on non-overlapping boundary partitions Γ T and Γ q,
such that Γ T ∪Γ q =Γ , according to:
T = T (x, t), x ∈ΓT (8)
qbnb = q(x, t), x ∈Γq (9)
Pressure and normal velocity boundary conditions are associated with the mass balance. They are prescribed by given data onnon-overlapping boundary partitions Γ p and ΓG, such that Γ p ∪ΓG =Γ , according to:
p = p(x, t), x ∈Γp (10)
ubnb = G(x, t), x ∈ΓG (11)
Note that Eqs. (1)–(3) involve the pressure gradient, but not pressure itself. Thus, at least one reference pressure value must beprescribed in order to define a unique pressure field.
Boundary conditions for the first radionuclide are specified concentration and diffusive flux, on non-overlapping boundarypartitions Γ φ and Γ ξ , such that Γ φ ∪Γ ξ =Γ :
φ = φ(x, t), x ∈Γφ (12)
ξbnb = ξ(x, t), x ∈Γξ (13)
Similarly, the boundary conditions for the second radionuclide are specified as:
ϕ = ϕ(x, t), x ∈Γϕ (14)
ηbnb = η(x, t), x ∈Γη (15)
where Γ ϕ and Γ η are non-overlapping boundary conditions such that Γ ϕ ∪Γ η =Γ .
2.1. Governing equations in non-dimensional form
Sometimes it is useful to recast the governing equations in non-dimensional form. Here the variables are non-dimensionalizedwith respect to reference scales conveniently chosen from the problem data. The non-dimensional velocity, pressure, temperature andconcentration fields are represented by u′
a = ua/u0, p′ = p/ρu20, T′ = (T − T0)/(Tmax − Tmin), φ′ =φ/φ0 and ϕ′ =ϕ/ϕ0, respectively.
Note that u0 is the velocity reference scale and Tmin and Tmax are the minimum and the maximum temperatures in the problem. Thereference scale for the concentration fields is the initial concentration of the first species, denoted by φ0. The spatial co-ordinates arenon-dimensionalized with respect to the reference length L, i.e. x′
a = xa/L. The non-dimensional time is represented by t′ = tu0/L.The gravity field is non-dimensionalized with respect to its modulus, i.e. g′
a = ga/||g||.In terms of the non-dimensional variables the governing equations become:
∂u′a
∂t′+ u′
b
∂u′a
∂x′b
− 1
Re
∂
∂x′b
(∂u′a
∂x′b
+ ∂u′b
∂x′a
)+ ∂p′
∂x′a
+ Ri g′aT
′ = 0 (16)
∂u′a
∂x′a
= 0 (17)
∂T ′
∂t′+ u′
b
∂T ′
∂x′b
− 1
RePr
∂
∂x′b
(∂T ′
∂x′b
)= 0 (18)

P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273 253
∂φ′
∂t′+ u′
b
∂φ′
∂x′b
− 1
(Pe)1
∂
∂x′b
(∂φ′
∂x′b
)+Daφ′ = 0 (19)
∂ϕ′
∂t′+ u′
b
∂ϕ′
∂x′b
− 1
(Pe)2
∂
∂x′b
(∂ϕ′
∂x′b
)−Daφ′ = 0 (20)
where Re = ρ||u||L/μ is the Reynolds number,Ri = β(Tmax − Tmin)||g||L/u20 is the Richardson number, Pr = cμ/κ is the Prandtl num-
ber and Da = λL/u0 is the Damkohler number. The Peclet numbers for the radionuclides φ and ϕ are (Pe)1 = u0L/ψ and (Pe)2 = u0L/ζ,respectively.
3. The stabilized finite element formulation
In this section, we derive the stabilized finite element formulation used in our computer code. We follow the same ideas presentedin De Sampaio (2005, 2006), extending the method to address the transport of radionuclides.
Eqs. (1)–(5) are discretized in time as
ρ
(�ua
�t+ θunb
∂�ua
∂xb
)+ ∂�p
∂xa= Fa (21)
∂�ua
∂xa= −∂u
na
∂xa(22)
ρc
(�T
�t+ θunb
∂�T
∂xb
)= Q (23)
�φ
�t+ θunb
∂�φ
∂xb= Q1 (24)
�ϕ
�t+ θunb
∂�ϕ
∂xb= Q2 (25)
where
Fa = −(ρub
∂ua
∂xb− ∂τab
∂xb+ ∂p
∂xa+ ρβga(T − T0)
)n(26)
Q = −(ρcub
∂T
∂xb+ ∂qb
∂xb
)n(27)
Q1 = −(ub∂φ
∂xb+ ∂ξb
∂xb+ λφ
)n(28)
and
Q2 = −(ub∂ϕ
∂xb+ ∂ηb
∂xb− λφ
)n(29)
Note that the superscripts n and n + 1 indicate the time level and �t is the time-step. The changes of the variables during the timestep are given by �p = pn+1 − pn, �ua = un+1
a − una , �T = Tn+1 − Tn, �φ =φn+1 −φn and �ϕ =ϕn+1 −ϕn. The velocity, pressure,temperature and concentration fields at time level n + θ are represented by un+θa = θun+1
a + (1 − θ)una , pn+θ = θpn+1 + (1 − θ)pn,Tn+θ = θTn+1 + (1 − θ)Tn, φn+θ = θφn+1 + (1 − θ)φn and ϕn+θ = θϕn+1 + (1 − θ)ϕn, respectively, where 0 ≤ θ≤ 1.
The above equations are discretized in space using standard C0 finite elements of equal order to approximate velocity, temperature,pressure and concentrations. Such a choice of interpolating spaces is not acceptable within the mixed formulation framework, as itviolates the Babuska–Brezzi condition (Brezzi and Fortin, 1991). However, the stabilized formulation presented in this section avoidsthis difficulty through the introduction of extra stabilizing terms (De Sampaio, 1991, 1993; De Sampaio and Coutinho, 1999). Theformulation also leads to adequate approximations of convection-dominated flows, for it generates streamline upwinding (Brooksand Hughes, 1982).
Let us consider the following spatial discretization of the problem variables: una = Njunaj , p
n = Njpnj , T n = NjT
nj , φn = Njφ
nj ,
ϕn = Njϕnj , �ua = Nj �uaj , �p = Nj �pj , �T = Nj �Tj , �φ = Nj�φj and �ϕ = Nj �ϕj . Note that Nj represents the finite

254 P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273
element shape functions and the variables with the j subscript are nodal values. Using the discretized field variables we can writethe following expressions for the squared discretization residuals:
Π1 =∫Ω
γ1RaRa dΩ (30)
Π2 =∫Ω
γ2E2 dΩ (31)
Π3 =∫Ω
γ3C2 dΩ (32)
Π4 =∫Ω
γ4S2 dΩ (33)
where the γ-parameters are scaling parameters to be defined later and Ra, E, C and S are discretization residuals given by
Ra = ρ
(�ua
�t+ θunb
∂�ua
∂xb
)+ ∂�p
∂xa− Fa (34)
E = ρc
(�T
�t+ θunb
∂�T
∂xb
)− Q (35)
C = �φ
�t+ θunb
∂�φ
∂xb− Q1 (36)
S = �ϕ
�t+ θunb
∂�ϕ
∂xb− Q2 (37)
Minimizing Π1, given by Eq. (30), with respect to the free �pi and �uai nodal values we obtain:∫Ω
γ1ρ
�t
(Ni + θ �tunb
∂Ni
∂xb
)Ra dΩ = 0 ∀ free�uai (38)
∫Ω
γ1∂Ni
∂xaRa dΩ = 0 ∀ free�pi (39)
Now, minimizing Π2, given by Eq. (31), with respect to the free �Ti we get:∫Ω
γ2ρc
�t
(Ni + θ �tunb
∂Ni
∂xb
)E dΩ = 0 ∀ free�Ti (40)
Finally, Π3 is minimized with respect to the free �φi and Π4 is minimized with respect to the free �ϕi, yielding∫Ω
γ31
�t
(Ni + θ �tunb
∂Ni
∂xb
)C dΩ = 0 ∀ free�φi (41)
∫Ω
γ41
�t
(Ni + θ �tunb
∂Ni
∂xb
)S dΩ = 0 ∀ free�ϕi (42)
The γ-parameters are chosen as γ1 =�t/ρ, γ2 =�t/ρc and γ3 = γ4 =�t, in order to normalize (and non-dimensionalize) the weightingfunctions in Eqs. (38) and (40)–(42). Note that the weighting functions in these equations have the same structure of the SUPGweighting of Brooks and Hughes (1982).
Combining Eq. (38) and the traction boundary condition, given Eq. (7), we obtain the following discretized momentum balance:∫Ω
(Ni + θ �tunb
∂Ni
∂xb
)Ra dΩ+
∫Γta
Ni[(−pnδab + τnab)nb − ta] dΓ = 0 ∀ free�uai (43)
We obtain the discretized energy balance from Eq. (40) and the heat flux boundary condition given by Eq. (9):∫Ω
(Ni + θ �tunb
∂Ni
∂xb
)E dΩ+
∫Γq
Ni(q− qnbnb) dΓ = 0 ∀ free�Ti (44)

P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273 255
Discretized equations for the transport of the radionuclides φ and ϕ are obtained from Eqs. (41) and (42) and the respective fluxboundary conditions given by Eqs. (13) and (15):∫
Ω
(Ni + θ �tunb
∂Ni
∂xb
)C dΩ+
∫Γξ
Ni(ξ − ξnbnb) dΓ = 0 ∀ free�φi (45)
∫Ω
(Ni + θ �tunb
∂Ni
∂xb
)S dΩ+
∫Γη
Ni(η− ηnbnb) dΓ = 0 ∀ free�ϕi (46)
An equation for the update of pressure is obtained combining Eq. (39) with the discretized mass balance, Eq. (22):∫Ω
�t
ρ
∂Ni
∂xaRa dΩ+
∫Ω
Ni
(∂�ua
∂xa+ ∂una
∂xa
)dΩ = 0 ∀ free�pi (47)
As shown in De Sampaio (2005, 2006), introducing the boundary condition given by Eq. (11) and using Green’s identity the aboveequation yields:∫
Ω
�t
ρ
∂Ni
∂xa
∂�p
∂xadΩ = −
∫Ω
�t
ρ
∂Ni
∂xa
(ρunb
∂una
∂xb− ∂τnab∂xb
+ ∂pn
∂xa+ ρβga(T
n − T0)
)dΩ−
∫Ω
Ni∂una
∂xadΩ
−∫ΓG
Ni(Gn+1 − Gn) dΓ (48)
In the above equation we compute τnab on element interiors according to τnab = μ((∂una/∂xb) + (∂unb/∂xa)).Note that Eq. (48) combines the least-squares minimization of momentum residuals with respect to pressure, Eq. (39), with the
discretized mass balance, Eq. (22). For this reason we call it as the pressure-continuity equation.From Eqs. (43) and (44) we obtain the equations governing the velocity and temperature changes during the time-step. These are
given by∫Ω
(Ni + θ �tunc
∂Ni
∂xc
)ρ
�t
(�ua + θ �tunb
∂�ua
∂xb
)dΩ
= −∫Ω
(Ni + θ �tunc
∂Ni
∂xc
)(ρunb
∂una
∂xb+ ∂�p
∂xa+ ρβga(T
n − T0)
)dΩ+
∫Ω
θ �tunc∂Ni
∂xc
(∂τnab∂xb
− ∂pn
∂xa
)dΩ
−∫Ω
∂Ni
∂xbτnab dΩ+
∫Ω
∂Ni
∂xapn dΩ+
∫Γta
Nitna dΓ (49)
and ∫Ω
(Ni + θ �tunc
∂Ni
∂xc
)ρc
�t
(�T + θ �tunb
∂�T
∂xb
)dΩ
= −∫Ω
(Ni + θ �tunc
∂Ni
∂xc
)ρcunb
∂T n
∂xbdΩ−
∫Ω
θ �tunc∂Ni
∂xc
∂qnb∂xb
dΩ+∫Ω
∂Ni
∂xbqnb dΩ−
∫Γq
Niqn dΓ (50)
The equations that govern the changes of the radionuclides concentrations φ and ϕ are obtained from Eqs. (45) and (46), respectively:∫Ω
(Ni + θ �tunc
∂Ni
∂xc
)1
�t
(�φ + θ �tunb
∂�φ
∂xb
)dΩ
= −∫Ω
(Ni + θ �tunc
∂Ni
∂xc
)(unb∂φn
∂xb+ λφn
)dΩ−
∫Ω
θ Δtunc∂Ni
∂xc
∂ξnb∂xb
dΩ+∫Ω
∂Ni
∂xbξnb dΩ−
∫Γξ
Niξn dΓ (51)
and ∫Ω
(Ni + θ �tunc
∂Ni
∂xc
)1
�t
(�ϕ + θ �tunb
∂�ϕ
∂xb
)dΩ
= −∫Ω
(Ni + θ �tunc
∂Ni
∂xc
)(unb∂ϕn
∂xb− λφn
)dΩ−
∫Ω
θ �tunc∂Ni
∂xc
∂ηnb∂xb
dΩ+∫Ω
∂Ni
∂xbηnb dΩ−
∫Γη
Niηn dΓ (52)
The terms multiplied by�t in Eqs. (48)–(52) are responsible for controlling wiggles in convection-dominated flows and for stabilizingthe computation, independently of the Babuska–Brezzi restrictions on the choice of interpolation spaces for velocity and pressure. In

256 P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273
particular, the equal order interpolation for all variables adopted here becomes possible for a suitable choice of�t. It is important toremark that rather than being proposed a priori, the stabilization terms have emerged naturally from the least-squares minimizationof discretization residuals with respect to the degrees of freedom.
3.1. Implicit subgrid modeling
Stabilized finite element formulations, such as the one derived above, inherently introduce a modeling of the unresolved scales. Inan important seminal work, Hughes (1995) proposed the Variational Multiscale Method, clarifying the relationship between subgridmodels and stabilized finite element formulations. In this section, we compare our stabilized formulation with the standard LargeEddy Simulation (LES) approach, based on the use of spatially filtered equations. We will show that our method is equivalent to theuse of a Galerkin discretization of spatially filtered equations, where a particular subgrid model, proportional to the discretizationresidual, is applied.
In LES the large turbulence scales are resolved by the discretization while the small subgrid scales are taken into account usingthe so-called subgrid models (Mathieu and Scott, 2000). The governing equations are obtained by formally applying a filter functionon the original Navier–Stokes system. The filtering operation is shown in Eq. (53), where we apply the filter to the velocity fieldua(x, t). The resulting filtered velocity field ua(x, t) is given by
ua(x, t) =∫G(x − x′)ua(x′, t) dx′ (53)
The filter function G(r) integrates to 1 and decays to zero outside a range |r| < O(�). The parameter � is referred to as the filterwidth (Mathieu and Scott, 2000).
Consider the mass balance and the momentum equation in conservative form, i.e.:
∂ua
∂xa= 0 (54)
ρ
[∂ua
∂t+ ∂(uaub)
∂xb
]+ ∂p
∂xa− ∂τab
∂xb+ ρβga(T − T0) = 0 (55)
Applying the filter to the above equations we obtain:
∂ua
∂xa= 0 (56)
ρ
[∂ua
∂t+ ∂(uaub)
∂xb
]+ ∂p
∂xa− ∂τab
∂xb− ∂τF
ab
∂xb+ ρβga(T − T0) = 0 (57)
where τFab = ρ(uaub − uaub). Note that the filtered momentum equation, Eq. (57), can be recast in convective form using the filtered
mass balance, Eq. (56):
ρ
[∂ua
∂t+ ub
∂ua
∂xb
]− ∂τab
∂xb+ ∂p
∂xa− ∂τF
ab
∂xb+ ρβga(T − T0) = 0 (58)
The filtering of the non-linear term of the momentum equation, Eq. (55), gives rise to a closure problem for the extra stress termτFab that appears in Eqs. (57) and (58). This term is formally analogous to the Reynolds stress that arises in the derivation of the
Reynolds Averaged Navier–Stokes (RANS) equations (Wilcox, 2000), although in LES one considers spatial filtering rather thanthe time averaging applied in RANS. At this point, the standard approach in LES is to introduce subgrid models to express τF
ab interms of the filtered flow variables. A number of subgrid closures have been proposed, such as the Smagorinsky model (Mathieuand Scott, 2000; Wilcox, 2000; Sagaut, 2001) for instance:
(τFab)Smagorinsky = μs
(∂ua
∂xb+ ∂ub
∂xa
)(59)
μs = ρ(cshe)2{(
∂ua
∂xb+ ∂ub
∂xa
)(∂ua
∂xb+ ∂ub
∂xa
)}1/2
(60)
where he is the characteristic element size and cs is a model parameter, adjusted according to the type of flow, and typically in therange of 0.1–0.2. The reader is referred to the work of Sagaut (2001) for a comprehensive account on the subgrid scale models usedin LES.

P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273 257
The filtering of the energy and concentration equations is performed in a similar way. The filtered equations are:
ρc
[∂T
∂t+ ub
∂T
∂xb
]+ ∂qb
∂xb+ ∂qF
b
∂xb= 0 (61)
∂φ
∂t+ ub
∂φ
∂xb+ ∂ξb
∂xb+ ∂ξF
b
∂xb+ λφ = 0 (62)
∂ϕ
∂t+ ub
∂ϕ
∂xb+ ∂ηb
∂xb+ ∂ηF
b
∂xb− λφ = 0 (63)
where qFb = ρc(ubT − ubT ), ξF
b = ubφ − ubφ and ηFb = ubϕ − ubϕ are fluxes that, like τF
ab, demand subgrid modeling in order toexpress them in terms of the filtered problem variables.
Let us approximate the filtered variables using the same time discretization and the same finite element shape functions we haveused when deriving our stabilized finite element method. In order to simplify notation, we will drop the overbars denoting spatialfiltering. Applying the classical Galerkin method to the filtered momentum equation, Eq. (58), we obtain:∫
Ω
Niρ
(�ua
�t+ θunb
∂�ua
∂xb
)dΩ+
∫Ω
Ni∂�p
∂xadΩ+
∫Ω
Niρunb
∂una
∂xbdΩ+
∫Ω
Niρβga(Tn − T0) dΩ
−∫Ω
∂Ni
∂xb(pδab − τab − τF
ab)n
dΩ−∫Γta
Nitna dΓ = 0 (64)
where the traction boundary condition includes both the viscous and the subgrid stress, i.e.:
(−pδab + τab + τFab)
nnb = tna (x, t), x ∈Γta (65)
Let us compare Eq. (64), obtained using the Galerkin method applied to the filtered momentum equation, with the stabilized formgiven by Eq. (49), obtained from the original (unfiltered) Navier–Stokes momentum equation. After a careful examination, weobserve that both equations are exactly the same if the subgrid stress is modeled by τF
ab = θ �tunbRa, where Ra is the discretizationresidual given by Eq. (34). Clearly, this means that our stabilized formulation implicitly introduces subgrid modeling in the discretizedmomentum equation, Eq. (49). Note that Ra is small in regions where the flow is well resolved. Indeed, the effect of τF
ab = θ �tunbRais selective. It represents the effect of subgrid scales on the resolvable flow where subgrid scales are intense (Ra is large). But it haslittle effect on the resolvable flow in regions where Ra is small. Note that this is not the case when using the Smagorinsky model, Eqs.(59) and (60), which is always active in the computation, leading to excessive dissipation of the resolvable flow features. Anotherinteresting aspect of this implicit subgrid model is that it vanishes on solid walls, where the velocity is zero. Thus, damping functionsare not required to enforce τF
ab to vanish on walls. A similar result is obtained if we apply the Galerkin method to the filtered energyand concentration equations, Eqs. (59)–(61). A comparison with the corresponding stabilized forms, given by Eqs. (50)–(52), showsthat our stabilized method implicitly introduces the following subgrid models: qF
b = θ �tunbE, ξFb = θ �tunbC and ηF
b = θ �tunbS.Note that E, C and S are discretization residuals given by Eqs. (35)–(37).
4. Local time-steps and synchronization
Note that, for θ = 1/2, the weighting function obtained for the momentum, energy and concentration balances, Eqs. (43)–(46), isgiven by
Wi = Ni + �t
2unc∂Ni
∂xc(66)
This gives a hint on how to select the time-step: comparing Eq. (66) with the SUPG weighting function (Brooks and Hughes, 1982),we verify that, for linear elements, a proper amount of streamline upwinding is introduced in the momentum balance, Eq. (49), ifwe choose the time-step as
�t = αhe
||un|| (67)
where
α =[
coth
(Reh
2
)− 2
Reh
](68)
In the above equations ||un|| = √unau
na is the local velocity modulus and he is the characteristic element size (the square root of
the element area). The element Reynolds number is Reh = ρ||un||he/μ. Note that α, defined by Eq. (67), is the so-called optimal

258 P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273
upwind parameter, whose choice leads to nodally exact solutions for one-dimensional steady-state convection–diffusion problems.Moreover, as shown in previous works (De Sampaio, 2005, 1991, 1993), the choice of the time-step according to Eqs. (67) and (68)also leads to stabilization of the pressure solution, regardless of the Babuska–Brezzi restrictions on the choice of the velocity andpressure interpolation spaces.
It is interesting to note that the time-step defined above is appropriate to follow the time evolution of the convection–diffusionprocesses resolvable on a mesh with local size he (De Sampaio, 1991). For strong convection (Reh 1) we obtain �t → he/||un||,whereas for pure diffusion (Reh = 0) we get �t = ρh2
e/6μ.In this work we propose an alternative way to compute the time-step. Instead of using Eqs. (67) and (68), we choose the time-step
as the minimum value between the convection and the diffusion characteristic time-scales, i.e. �t = min(tc, td), where tc = he/||un||is the convection time-scale and td = ρh2
e/6μ is the diffusion time-scale. This is equivalent to approximating the α-value in Eq. (68)by α′ given by the function:
α′(Reh) ={Reh/6 ifReh ≤ 6
1 ifReh > 6(69)
and then computing �t =α′he/||un||. The α′-value, given by Eq. (69), is precisely the asymptotic approximation of α introduced byBrooks and Hughes (1982) to simplify the computation of the SUPG weighting function. It is interesting to notice that here the sameapproximation was obtained on the grounds of choosing the time-step according to the time-scale of the dominant (fastest) physicalprocess.
On the other hand, in order to introduce optimal upwinding in the energy equation, the element Reynolds number in Eq. (69)must be replaced by the element Peclet number Peh = Pr Reh. Clearly, unless the Prandtl number is Pr = 1, the time-step for themomentum and energy equations will differ (the difference is more pronounced within boundary layers, where diffusion effectsare dominant). Furthermore, note that the time-step given by �t =α′he/||un|| varies spatially according to local velocity, physicalproperties and local mesh size. Therefore, to apply optimal upwinding for both momentum and energy, we need to use two distinctspatially varying time-step distributions. For momentum we use �tM =α′(Reh)he/||un||, whilst �tE =α′(Peh)he/||un|| is employedfor energy. This is equivalent to selecting �tM = min(tc, tdM) and �tE = min(tc, tdE), where tdM = ρh2
e/6μ and tdE = ρch2e/6κ are
the momentum and energy diffusion time-scales, respectively.The time-steps used for updating the concentration of the radionuclides are also chosen according to the time-scale of the fastest
physical process. However, besides convection and diffusion time-scales, we need also to consider the time-scale for the decayof φ (which is also the time-scale for the creation of ϕ). The time-scale for radioactive decay is chosen as tdecay = 0.2/λ, which isapproximately 1/3 of the half-life of φ. Therefore, for updating φ we choose �tφ = min(tc, tdφ , tdecay) whereas for updating ϕ weuse �tϕ = min(tc, tdϕ , tdecay). Note that tdφ = h2
e/6ψ and tdϕ = h2e/6ς are the diffusion time-scales for φ and ϕ, respectively.
Because we have optimal time-steps that vary with position and according to the quantity transported (momentum, energy orradionuclide concentrations), we have to resort to a special scheme to synchronize the time advance of the computation. In this paper,we adopt the procedure introduced in De Sampaio (2005, 2006). It is based on selecting a synchronization time-step �t*, whichwill be the same for all flow variables and will not vary in space (in fact, the usual concept for a time-step). The synchronizationtime-step is chosen to be quite close to the minimum problem time-step and is calculated as �t* = 0.999 min(�tM, �tE, �tφ, �tϕ).
Let �ua,�p,�T ,�φ and �ϕ be the variable changes obtained when using the appropriate local time-steps to solveEqs. (48)–(52). On the other hand, let us denote the variable changes from time tn to tn +�t* (the synchronization time) as�u∗
a,�p∗,�T ∗,�φ∗ and �ϕ∗. Thus, keeping the same rate of change, we have the following relations:
�u∗a
�t∗= �ua
�tM(70)
�p∗
�t∗= �p
�tM(71)
�T ∗
�t∗= �T
�tE(72)
�φ∗
�t∗= �φ
�tφ(73)
�ϕ∗
�t∗= �ϕ
�tϕ(74)
In practice, the computation based on local time-steps and the synchronization phase do not have to be performed separately. Indeed,the synchronization phase, represented by Eqs. (70)–(74), can be embedded in Eqs. (48)–(52). Thus, the synchronized solution at

P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273 259
tn +�t* can be obtained directly solving the following equations:∫Ω
�t2M
ρ�t∗∂Ni
∂xa
∂�p∗
∂xadΩ = −
∫Ω
�tM
ρ
∂Ni
∂xa
(ρunb
∂una
∂xb− ∂τnab∂xb
+ ∂pn
∂xa+ ρβga(T
n − T0)
)dΩ
−∫Ω
Ni∂una
∂xadΩ−
∫ΓG
Ni(Gn+1 − Gn) dΓ (75)
∫Ω
(Ni + θ �tMu
nc
∂Ni
∂xc
)ρ
�t∗
(�u∗
a + θ �tMunb
∂�u∗a
∂xb
)dΩ
= −∫Ω
(Ni + θ �tMu
nc
∂Ni
∂xc
)(ρunb
∂una
∂xb+ �tM
�t∗∂�p∗
∂xa+ ρβga(T
n − T0)
)dΩ+
∫Ω
θ �tMunc
∂Ni
∂xc
(∂τnab∂xb
− ∂pn
∂xa
)dΩ
−∫Ω
∂Ni
∂xbτnab dΩ+
∫Ω
∂Ni
∂xapn dΩ+
∫Γta
Nitna dΓ (76)
∫Ω
(Ni + θ �tEu
nc
∂Ni
∂xc
)ρc
�t∗
(�T ∗ + θ �tEu
nb
∂�T ∗
∂xb
)dΩ
= −∫Ω
(Ni + θ �tEu
nc
∂Ni
∂xc
)ρcunb
∂T n
∂xbdΩ−
∫Ω
θ ΔtEunc
∂Ni
∂xc
∂qnb∂xb
dΩ+∫Ω
∂Ni
∂xbqnb dΩ−
∫Γq
Niq dΓ (77)
∫Ω
(Ni + θ �tφu
nc
∂Ni
∂xc
)1
�t∗
(�φ∗ + θ �tφu
nb
∂�φ∗
∂xb
)dΩ
= −∫Ω
(Ni + θ �tφu
nc
∂Ni
∂xc
)(unb∂φn
∂xb+ λφn
)dΩ−
∫Ω
θ �tφunc
∂Ni
∂xc
∂ξnb∂xb
dΩ+∫Ω
∂Ni
∂xbξnb dΩ−
∫Γξ
Niξn dΓ (78)
∫Ω
(Ni + θ �tϕu
nc
∂Ni
∂xc
)1
�t∗
(�ϕ∗ + θ �tϕu
nb
∂�ϕ∗
∂xb
)dΩ
= −∫Ω
(Ni + θ �tϕu
nc
∂Ni
∂xc
)(unb∂ϕn
∂xb− λφn
)dΩ−
∫Ω
θ �tϕunc
∂Ni
∂xc
∂ηnb∂xb
dΩ+∫Ω
∂Ni
∂xbηnb dΩ−
∫Γη
Niηn dΓ (79)
where�u∗a = Nj �u
∗aj ,�p
∗ = Nj �p∗j ,�T
∗ = Nj �T∗j ,�φ∗ = Nj �φ
∗j and�ϕ∗ = Nj �ϕ
∗j . Clearly,�u∗
aj ,�p∗j ,�T
∗j ,�φ∗
j and
�ϕ∗j are the nodal values of the change of the problem variables from time tn to time t* = tn +�t*.The solution procedure is segregated. The pressure change is computed first solving Eq. (75) for �p∗. Then, the velocity field
change �u∗a is obtained solving Eq. (76). This is followed by the computation of the temperature change �T ∗ from Eq. (77).
Finally, the change of the radionuclide concentrations �φ∗ and �ϕ∗ are computed solving Eqs. (78) and (79), respectively Thenew synchronized solution at t∗ = tn +�t∗ is given by u∗
a = una +�u∗a, p
∗ = pn +�p∗, T ∗ = T n +�T ∗, φ∗ = φn +�φ∗ andϕ∗ = ϕn +�ϕ∗. After each step the problem variables are updated and the computation proceeds until the specified final analysistime is reached.
5. Code implementation
At present we have developed a computer code for the study of 2D problems, where linear triangles are used to interpolateall dependent variables. Even in 2D, the analysis of dispersion of radionuclides with the present method is very computationallyintensive. In order to make the method viable to solving practical problems, we make use of dynamic adaptive finite element meshes,based on error estimation, and parallel programming optimized for high performance on a Beowulf-type parallel computing system.
The computer code used in this work has been adapted from the NS SOLVER MPI 2D A program written by De Sampaio (2005,2006) and validated in the simulation of a number of classical flow and heat transfer problems. In De Sampaio (2005) the programwas demonstrated in the study of the lid-driven cavity flow and in the simulation of vortex shedding from a circular cylinder incrossflow. Applications involving flow and heat transfer in free, mixed and forced convection problems were shown in De Sampaio(2006). The results obtained in all simulations performed in De Sampaio (2005, 2006) compared very well with experimental dataand with other computational results available in the literature.

260 P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273
For the present work the program NS SOLVER MPI 2D A was modified in order to include the equations describing the transportof radionuclides. Small changes in the data input and output were also required, to introduce initial and boundary conditions for theconcentration variables, and for the preparation of the output files for these new scalar fields. The modifications have been made insuch a way that the structure and organization of the original code were preserved. Thus, the program used in the present work keptthe main characteristics of the NS SOLVER MPI 2D A code: (i) the use of adaptive remeshing based on estimated velocity gradienterrors and (ii) implementation on a Beowulf-type parallel distributed system through the use of domain partitioning techniques andcommunication via MPI library routines.
5.1. Adaptive remeshing
In this work the a posteriori error estimator of Zienkiewicz and Zhu (1987) is used to estimate the velocity gradient error and toguide a remeshing procedure based on equally distributing the estimated error among the finite elements. The strategy, presented indetail in De Sampaio and Coutinho (1999), requires the user to specify the aimed number of elements and the minimum element sizehmin to be employed in the computation. As shown in Section 4, the space and time discretizations used in our method are related.Thus, besides limiting the number of elements required to cover any given portion of the domain, the choice of the minimum elementsize indirectly limits the minimum time-step size.
Remeshing is based on the use of a coarse background grid that is locally refined with the creation of new points as required. Thenew points are connected to the nodes of the original background grid using Bowyer’s algorithm (Bowyer, 1981).
We are dealing with problems where the flow field evolves. In general, as the simulation proceeds, a mesh that is well adjusted toa particular flow configuration, at a given time, will not be suitable later. In previous works (De Sampaio et al., 2004; De Sampaioand Coutinho, 1999) we have adopted an automatic remeshing algorithm that required error estimation to be performed at everytime-step. Here we employ a different strategy, which is described next.
First, we estimate a time-scale suitable to follow the evolution of the largest eddies. If u0 is the problem characteristic velocityand L is the characteristic spatial length, we set the large eddy time-scale as tlarge = L/2u0. Starting with the first mesh, and then forevery newly generated mesh, we define the number of steps for which the mesh will be used according to nsteps = tlarge/�t*, where�t* is the synchronization time-step used to advance the solution (clearly, nsteps is rounded to the closest integer). Only when thenumber of steps nsteps specified for a particular mesh is reached, the velocity gradient error is estimated and a new mesh is generatedaccordingly.
Consider, for instance, the application of this automatic remeshing algorithm to the problem of periodic vortex shedding from acircular cylinder in crossflow. If we select u0 as the free stream velocity and L as the cylinder diameter, we will obtain approximately10–12 adaptive meshes per vortex shedding period. This is adequate to follow closely the evolution of the problem with well-adjustedfinite element meshes, whilst not performing expensive error estimation calculations at every single time-step.
5.2. Implementation on a Beowulf parallel computing system
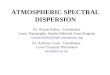
The implementation on the Beowulf system is based on the concept of domain decomposition. The METIS library (Karipys andKumar, 1998) is used to split the finite elements (and nodes) among the processors available, balancing the computational loadand minimizing communications. The message passing interface (MPI) library is used to transfer data among processors. Fig. 1illustrates a domain decomposition for the case of four processors. The routine “METIS PartMeshDual” divides the finite elementsand nodes among the processors. The output from “METIS PartMeshDual” is processed to create lists of elements belonging toeach partition, lists of nodes strictly inside each partition (interior nodes), and a list of interface (shared) nodes (i.e. nodes that areshared by elements residing in different partitions). The organization of this data structure is performed in sequential mode, but onceit is prepared, we can explore parallelism in the computation of loops over elements and nodes as follows:
(i) Every loop over elements can be recast into parallel loops over domain partitions and loops over the elements belonging to eachcorresponding partition.
(ii) Every loop over nodes is broken down into loops over the interior nodes and loops over the shared nodes. The loops overinterior nodes can be processed in parallel loops over the domain partitions and loops over the nodes inside each correspondingpartition. On the other hand, the loops over shared nodes have to be processed in sequential mode. Furthermore, MPI “reducetype” routines are used to combine, on shared nodes, contributions arising from different domain partitions.
Note that the ratio “number of shared nodes/number of interior nodes” tends to diminish as a given discretization is refined, meaningthat we can expect better parallel performance as the number of degrees of freedom is increased.
In view of the automatic remeshing process, we need to perform a new domain partition every time a new adaptive mesh iscreated. As mentioned in Section 5.1, each adaptive mesh lasts for nsteps = tlarge/�t* time-steps, which is also the number of steps forwhich a specific domain partition is kept in use. Clearly, parallel performance increases as nsteps grows, meaning that the same meshand mesh partitioning are used for a larger number of time-steps, resulting in more operations being performed in parallel mode.

P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273 261
Fig. 1. An example of domain decomposition using four processors: the elements belonging to the same partition are painted using the same color. The small dotsrepresent the interior nodes and the large dots illustrate the shared nodes.
Note that tlarge = L/2u0 is fixed for a given problem, depending only on the chosen velocity and length scales, u0 and L, respectively.Thus nsteps grows when �t* diminishes, i.e. if smaller elements are allowed by reducing the minimum element size hmin.
Therefore, the present parallel adaptive implementation has the desirable property of increasing its parallel performance undertime–space refinement.
As for any parallel code implementation on a Beowulf system, the actual parallel performance obtained when running a particulargiven problem depends on a compromise between individual processor speed and the speed of communication of the network. Atpresent we are using a system comprising 16 computers with Pentium IV processors, each with 3.0 GHz clock and 1 GB memory,connected by a 1 GB/s Ethernet. For our present Beowulf system, limited to 16 processors, we consistently obtain parallel efficiencyof over 90% provided we have at least 10,000 elements per processor. Thus, if we have a problem comprising 80,000 elements, wecan expect a speed-up of at least 7.2 if we run the code using eight processors.
6. Numerical simulations
We present here the use of our code in some numerical simulations of atmospheric dispersion of radionuclides from a NuclearPower Plant (NPP).
In Section 6.1, we consider the case of a controlled emission from a chimney. We investigate the effect of the emission temperatureand of an irregular topography on the radionuclides concentration levels.
Next, in Section 6.2, we address a catastrophic event, where we postulate the failure of all barriers, including the rupture ofthe reactor building walls. In the examples analyzed in Section 6.2 the radionuclides are released at a very high temperature. Oursimulations show that the plume behavior is strongly dependent on the Richardson number, which expresses the relative strengthbetween free and forced convection.
Among the large number of radionuclides generated in a NPP, we decided to follow in our examples the concentration of Iodine136 (I-136). This element is a typical fission product with a half-life of 83.4 s, decaying through beta emission into Xenon 136(Xe-136). The radionuclide Xenon 136 has a half-life of 9.3 × 1019 years. Thus the pair of radionuclides (I-136, Xe-136) fits wellin the model presented in Section 2. It is important to stress that the model presented in Section 2 can be easily and readily adaptedto deal with other radionuclides, including more complex decay chains.
The physical properties considered for the fluid (atmospheric air; Holman, 1989) and the radioactive material (KAERI, 2000)were: air density: ρ = 1.1774 kg/m3; air viscosity: μ= 1.8462 × 10−5 kg/(m s); air volumetric expansion coefficient: β = (1/300) K−1
(assuming air as an ideal gas); air specific heat at constant pressure: c = 1.0057 × 103 J/(kg K); air thermal conductivity:k = 2.6240 × 10−2 W/(m K); radioactive decay constant for I-136: λ= 8.311 × 10−3 s−1.
In the computations we have neglected the effect of molecular mass diffusion for the radionuclides, setting the moleculardiffusivities Ψ = 0 and ζ = 0. Although this makes the molecular fluxes ξb and ηb to vanish, we recall that the stabilized formula-tion implicitly introduces subgrid turbulent fluxes given by ξF
b = θ �tunbC and ηFb = θ �tunbS. Our approximation is justified by

262 P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273
Table 1Monitored points for the case studies A, B and C (controlled release)
Point number Distance downflow from the chimney (m) Height (m)
1 189.0 67.52 339.0 67.53 489.0 67.5
4 189.0 157.55 339.0 157.56 489.0 157.5
7 189.0 277.58 339.0 277.59 489.0 277.5
the fact that in atmospheric dispersion problems mass diffusion due to turbulent mixing is much stronger than molecular massdiffusion.
6.1. Controlled release
Three cases of controlled release of radioactive material through a chimney have been simulated. These have been called A, B andC. The radionuclide concentrations on nine selected points have been monitored during the study. The co-ordinates of the monitoredpoints are shown in Table 1.
Case A is our simplest example. The analysis is restricted to a domain where there are no obstacles to the flow past the chimney.The radioactive material is released at the same temperature of the surrounding atmosphere, at 25 ◦C (298 K), meaning that buoyancyforces are not present in case A.
Case B considers obstacles in the flow, aiming to represent an irregular topography and the presence of small buildings. Thepurpose is to verify the interference caused by the obstacles on the radionuclide concentrations. As in case A, the material is releasedat the same temperature of the environment. Thus, buoyancy is not active in case B. This case most closely resembles the releaseof radionuclides in normal operation of a NPP, since there are always obstacles near the power plant and the temperature differencebetween the material released and the nearby atmosphere is negligible.
Case C presents the combination of obstacles in the flow and the release of hot radioactive material through the chimney. Thesame irregular topography used in case B has been used in case C, but we assume that the temperature of the material releasedis 100 K higher than the atmospheric temperature. In this example we have the interference of the flow with the irregular terraincombined with intense buoyancy forces that push the released material upwards. Case C depicts a severe accident where the plantoperators have been forced to release some hot radioactive material to the atmosphere in order to control the internal pressure in thereactor building.
Actually, the temperature difference �T between the released material and the environment depends on several factors. Amongthese we may cite the internal containment pressure, the plant operating conditions, whether there has been an accident and of whichkind, etc. The value �T = 100 K was chosen here neglecting all these factors, with the mere purpose of illustrating the importanceof buoyancy forces on the behavior of the plume.
Fig. 2 shows the flow domains used for the cases A, B and C. The characteristic length for the problem is the chimney heightL = 150 m. The maximum domain extension from left to right is 2670 m and the domain height is 1275 m. In the three cases analyzedwe have considered that the wind enters the domain at the left boundary with u0 = 2 m/s, which is chosen as the reference scalefor velocity. The flow is assumed to leave the chimney also with u0 = 2 m/s. A zero reference pressure was prescribed on the topof the domain and on its right boundary. The temperature of the atmospheric air is assumed to be 25 ◦C (298 K). Thus, in case C,the radioactive material is released through the chimney at 125 ◦C (398 K). At time t = 0 we assume that the initial concentrationsφ (Iodine 136) and ϕ (Xenon 136) are equal to zero. The boundary conditions for the concentrations at the chimney are φ = 1 andϕ = 0.
Table 2 presents the non-dimensional numbers (defined in Section 2.1) for the three cases of controlled release analyzed here.The relationship between non-dimensional and dimensional time is given by t* = u0t/L. Thus, for cases A, B and C, where u0 = 2 m/sand L = 150 m, we have that a unit of non-dimensional time is equivalent to 75 s.
Case C is the most interesting of the three examples analyzed, as it involves irregular topography and buoyancy effects. Thus,we decided to present the results of case C in greater detail. The ϕ-concentration on the monitored points will be presented for thethree cases simulated in order to make a comparative assessment of the effects of terrain irregularities and buoyancy forces on theatmospheric dispersion. We recall there are no buoyancy forces in cases A and B. The difference between cases A and B is that incase A the terrain is plain whereas in case B we consider the same irregular topography adopted in case C.

P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273 263
Fig. 2. Domains used for the analyses of controlled release through the chimney: domain for (a) case A and (b) cases B and C.
The background mesh used in case C contained 20,370 elements and 11,395 nodes. The adaptive meshes generated during thetransient contained about 40,000 elements and 22,000 nodes. Thus, more than 130,000 degrees of freedom have been computed ateach time-step.
Fig. 3 shows adaptive meshes and the concentration of radionuclides φ and ϕ at some selected points in time during the transientanalysis of case C. The final time for the transient analysis is 1050.5 s (17.5 min). Because the parent radionuclide has a short half-lifeof 83.4 s, its concentration φ cannot be seen far away from the chimney. Fig. 3 also shows the blocking effect of the hill on the ϕconcentration, in spite of the presence of buoyancy forces that help driving part of the material upwards. We will see later that theblocking effect caused by the hill is much more intense for case B, where the material is released at the same temperature of theenvironment.
The concentrations ϕ predicted at the nine monitored points for cases A, B and C are compared in Fig. 4. The concentrations inthese points are quite different for the three cases analyzed, showing the importance of the release temperature and terrain topographyon the dispersion of radionuclides. In the following we attempt to explain some of the differences observed in the light of the flowfields obtained in the CFD simulation.
The concentrations shown in Fig. 4(a) correspond to point 1 (189 m to the right of the chimney and 67.5 m high). Note that caseA presents the highest concentration. The concentration obtained for case B is considerably lower than that of case A, whilst theconcentration for case C is close to zero. In fact, it is reasonable to expect very low concentration values for case C at point 1, asthe buoyancy forces drive the material upwards. On the other hand, there are no buoyancy effects in cases A and B. The differencebetween these cases is the topography, which is plain in case A, but presents obstacles to the flow in case B. The different topographyin cases A and B leads to different flow patterns that explain the very different concentrations observed in Fig. 4(a). The velocityfields for cases A and B, after 7 min, can be seen in Fig. 5. Note that these flow fields have vortices that differ in both position andintensity in the region close to the chimney.
Fig. 4(b) shows the concentrations ϕ corresponding to point 2 (339 m to the right of the chimney and 67.5 m high). The samearguments presented for point 1, regarding the concentration levels observed for cases A, B and C, also apply for point 2. As expected,though, the material takes more time to reach point 2, which is further downstream.
Table 2Non-dimensional numbers corresponding to the controlled release examples
Non-dimensional number Case A Case B Case C
Reynolds (Re) 1.920 × 107 1.920 × 107 1.920 × 107
Prandtl (Pr) 0.71 0.71 0.71Damkohler (Da) 0.6225 0.6225 0.6225Richardson (Ri) 0 0 122.5

264 P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273
Fig. 3. Results for case C during the transient: adaptive meshes (first column), concentration φ (second column) and concentration ϕ (third column).
Point 3 is located 489 m from the chimney, but also at the height of 67.5 m. The concentrations ϕ obtained for point 3 can be seenin Fig. 4(c). Note that this point is close to the hill included in the simulation of cases B and C. The blocking effect of the hill on thedispersion of the material is clearly observable in case B, where no buoyancy effect is present.
Points 4, 5 and 6 are at the height of 157.5 m and the corresponding ϕ concentrations are shown in Fig. 4(d)–(f), respectively. Atpoint 4, which is the closest to the chimney, the concentrations are highly oscillatory for cases A and B, as seen in Fig. 4(a). Thisis caused by the unsteady vortices created by the interaction of the incoming wind with the chimney structure. For case C, wherethe flow is driven mainly by the buoyancy forces, as soon as the material leaves the chimney, oscillations appear only at the higheraltitude of 277.5 m, as shown in Fig. 4(g)–(i). The blocking effect of the hill on the ϕ concentration levels observed for point 3 incase B, also appears for point 6, which is the monitored point at the height of 157.5 m that is closest to the hill.
Points 7, 8 and 9 are at the height of 277.5 m and the corresponding ϕ concentrations are shown in Fig. 4(g)–(i), respectively. Letus consider initially the cases A and B. Note that the ϕ concentrations reach significant levels at these points, located much higherthan the point of emission, even though there are no buoyancy forces acting in cases A and B. This can be explained by the presenceof large vortices behind the chimney, that drive the material to those heights. These large vortices can be seen in Fig. 6, where thevelocity field corresponding to case A is depicted after 10 min of transient.
Referring again to Fig. 4(g)–(i), let us now consider the ϕ concentrations for case C, where the material is released at a temperature100 K higher than the outside temperature. The buoyancy forces that are active in case C help to drive the flow the monitored points7, 8 and 9, which are at the height of 277.5 m. Thus, at first sight it seems awkward that the ϕ concentrations observed for case C arelower than those obtained for cases A and B, where no buoyancy forces are present. However, a more careful analysis shows thatthe buoyancy forces in case C accelerate the released material considerably, as soon as it leaves the chimney. Thus, in case C, the

P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273 265
Fig. 4. Concentration ϕ at the monitored points as a function of the non-dimensional time (t* = tu0/L).
released material reaches the monitored points 7, 8 and 9 faster than in cases A and B. Simply, there is not enough time for the parentnuclide to decay forming the second nuclide in the same quantities seen in cases A and B. The high velocity attained by the plumein case C can be seen in Fig. 7, which depicts isolines of the velocity modulus. Only values higher than 1.6u0 are shown in Fig. 7.Note that the velocity modulus on the plume vary from 1.6 to 3.8 times the reference velocity u0. Thus, in terms of dimensionalunits, the velocity modulus on the plume ranges from 3.2 to 7.6 m/s, while the release velocity at the chimney is only u0 = 2 m/s.
6.2. Release after failure of all barriers
In this section, we consider a catastrophic accident where we postulate the failure of all barriers, including the rupture of thereactor building walls. In particular, we show the strong interaction that exists between the source of emission and the surrounding

266 P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273
Fig. 5. Velocity field for cases A (a) and B (b) after 7 min.
environment, a phenomenon that cannot be dealt with appropriately using the classical dispersion models that do not solve the flowequations.
Two cases, identified as D and E, have been analyzed. In both cases we have considered a plain topography. The reactor buildingheight of 50 m is taken as the reference length for the study (L = 50 m). The analysis domains employed in cases D and E are shownin Fig. 8.
Differently from the problems treated in Section 6.1, here we do not prescribe a velocity for the release of the radioactive material.The transient is generated by unbalanced buoyancy forces that exist at the initial conditions assumed, and by the presence of postulatedholes in the reactor building walls. At the initial conditions we consider that the reactor building has an internal temperature that is300 K higher than the outside temperature. Also at t = 0, the concentration φ of the parent radionuclide inside the reactor building
Fig. 6. Velocity field for case A after about 10 min.

P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273 267
Fig. 7. Isolines of velocity modulus for case C after 10 min: only values higher than 1.6u0 are shown.
is set to one, whilst the concentration of the second radionuclide is set to zero. The difference between cases D and E is the windvelocity considered. In case D we have u0 = 1 m/s, but in case E we set u0 = 10 m/s.
Table 3 presents the non-dimensional number corresponding to cases D and E. For case D, the high Richardson number indicatesthat the problem is dominated by free convection. The much stronger wind assumed in case E reduces the Richardson number to 4.9and we have a problem in the realm of mixed convection.
Fig. 8. Analysis domains for the catastrophic accident: domain for (a) case D and (b) case E.

268 P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273
Fig. 9. Results of ϕ-concentration for case D (Richardson number 490): from top to bottom, isolines at t = 50.6 s, t = 99.4 s and t = 150.0 s.

P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273 269
Fig. 10. Results of ϕ-concentration for case E (Richardson number 4.9): from top to bottom, isolines at t = 67.5 s, t = 132.5 s and t = 200.0 s.

270 P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273
Table 3Non-dimensional numbers corresponding to the catastrophic accident examples
Non-dimensional number Case D Case E
Reynolds (Re) 3.190 × 106 3.190 × 107
Prandtl (Pr) 0.71 0.71Damkohler (Da) 0.415 0.0415Richardson (Ri) 490 4.9
Fig. 11. Velocity at the beginning of the transient. Results for case E: velocity field at t = 2.5 s (top) and at t = 5.0 s (bottom).

P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273 271
Fig. 12. Isolines of velocity modulus for case D after 2.5 min: only values higher than 7.0u0 are shown.
The background meshes used in cases D and E contained about 17,000 elements and 8500 nodes. The adaptive meshes generatedduring the transient analyses had up to 40,000 elements and 20,000 nodes. This means that up to 120,000 degrees of freedom havebeen updated at each time step.
Figs. 9 and 10 depict the evolution of the plume, showing the ϕ-concentration for cases D and E, respectively. In case D, where thevelocity modulus is u0 = 1 m/s, the plume rises almost vertically, as the buoyancy forces are much more intense than the convectiveforce exerted by the wind. For case E we have the same accident in the reactor building, but the wind velocity has been raised tou0 = 10 m/s. Although the buoyancy forces remain high, one can observe that the wind drags the plume in case E.
As pointed out previously, unbalanced buoyancy forces at t = 0 are responsible for the start of the transient. The high temperatureair inside the reactor building escapes through a postulated hole on the ceiling. Simultaneously, outside air is sucked into the reactorbuilding through a postulated hole on the wall. This can be seen in Fig. 11, which illustrates the velocity field at the beginning ofthe transient for case E.
It is important to remark that the release rate of the radioactive material to the environment is not known a priori. It results from theinteraction of the various forces that govern the flow during the entire transient. In particular, the interaction of the emission sourceand the outside conditions are of foremost importance in establishing the release rate. Thus, the temperature difference between theair inside and outside the building, the size and precise location of the postulated holes, and the wind velocity, are aspects that definethe flow field and the way plume is going to evolve. It is worth stressing that such aspects cannot be dealt with appropriately by thetraditional approach, based on Gaussian plume models, where the fluid dynamics is not solved as part of the problem.
In the catastrophic accident analyzed in this section the flow reaches very high velocities. Fig. 12 shows isolines of the velocitymodulus for case D after 2.5 min. Only values higher that 7.0u0 are shown in Fig. 12. Note that velocities as high as 16.781u0 canbe observed. We recall that in case D we have considered u0 = 1 m/s. Thus, using dimensional units, in some locations the velocitymodulus reach more than 16.781 m/s (more than 60 km/h). The intense buoyancy forces that are active in this example cause the highvelocities attained by the plume. Indeed, Fig. 12 shows that in a vast region it is the accident that drives the surrounding atmosphereand not the opposite.
7. Concluding remarks
Most models traditionally used in the study of the dispersion of radionuclides released from NPPs, such as Gaussian Plumemodels, do not involve solving the flow equations. Their success in the mesoscale range (2–2000 km) rests on the use of well-tunedparameters that are selected according to predefined weather conditions. However, because they do not model the flow directly, theyare not suited to deal with the turbulence that is generated locally from the interaction of the wind with buildings, the terrain and theconvective forces of the released material stream.
In this work the authors advocate the use of CFD to address the atmospheric dispersion of radionuclides in the vicinity ofNPPs. We have discussed the physical model and the stabilized finite element formulation adopted. In order to account for localeffects, the physical model used includes the equations that govern the flow. A stabilized finite element formulation, based on theminimization of squared discretization residuals and on the use of optimal local time-steps, has been presented. The stabilized finiteelement formulation introduces a subgrid modeling proportional to the discretization residuals. This is used to model the effect of theunresolvable turbulent scales on the large vortices and flow structures that can be captured and simulated by the available space–timediscretization.

272 P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273
We have discussed computational issues, such as adaptive techniques based on error estimation, and the implementation of themethod in a Beowulf-type parallel computing system. Although the theoretical framework presented applies to both 2D and 3D,we have confined ourselves to the implementation of the method in a 2D code. In spite of the limitations that are inherent to a2D analysis, there are good reasons that justify an investigation on the use of the present method in a 2D setting. Firstly, the 2Danalyses are conservative in the sense that the 2D model neglects diffusion of radionuclides from the 2D domains used in thesimulations. Secondly, because the CFD approach is considerably more demanding in CPU time than the traditional methods, a 2Dimplementation represents a compromise that permits introducing the local phenomena in the study, whilst limiting the overall costof the analysis.
Numerical simulations have been shown in Section 6. Cases A, B and C represent controlled release through a chimney, whereasin cases D and E we consider that radioactive material is released after failure of all barriers. In the cases of controlled release,the effect of the topography and buoyancy forces is clearly visible on the ϕ concentrations monitored at selected points. In casesD and E the release rate is not known a priori, as it results from the interaction of the various forces that govern the flow duringthe transient. Using our CFD code we have been able to simulate the plume as a function of the release temperature, the size andlocation of the postulated holes, and the wind velocity. Note that this problem cannot be dealt with appropriately using the classicaldispersion models, which do not solve the flow equations.
The technical meeting on the Use of Computational Fluid Dynamics Codes for Safety Analysis of Nuclear Reactor System heldin Pisa in 2002 concluded that CFD codes have a broad potential for qualitative assessment in areas where traditional methods areinadequate (IAEA, 2003). Another important remark from the meeting is that commonly accepted quality and performance criteriafor the assessment of CFD results, and Best Practice Guidelines on the use of CFD for reactor safety, still remain to be established(IAEA, 2003). Both remarks seem to apply to the CFD application proposed in this work, namely, the use of CFD to address theatmospheric dispersion of radionuclides in the vicinity of NPPs.
So far, we can say that the CFD approach used here has been validated against numerical and experimental data, in a numberof flow and heat transfer problems involving free, mixed and forced convection (De Sampaio, 2005, 2006). Moreover, it has beenapplied in the study of turbulent fluid–structure interaction in De Sampaio et al. (2004). Comparison between numerical results andwind tunnel experiments showed very good agreement in the prediction of flow induced oscillations of the Rio-Niteroi bridge inBrazil (De Sampaio et al., 2004). Nonetheless, as far as validation is concerned, much work still remains to be done before the codecan be used confidently for quantitative predictions in Nuclear Reactor Safety.
Although we have considered here only two radionuclides, more complex decay chains can be easily accommodated, with minormodifications in the computer code. The development of a 3D code is also planned.
Besides the application we have focused here, the computer code developed can be applied in the dispersion of radionuclidesin other radioactive installations and laboratories such as research reactors, cyclotrons, food irradiation industries, nuclear fuelreprocessing plants, nuclear waste deposits, etc.
Acknowledgements
P.A.B. de Sampaio and C.M.F. Lapa acknowledge the support of CNPq. M.A.G. Junior acknowledge the support of CNEN.
References
Bowyer, A., 1981. Computing Dirichlet Tessellations. Comput. J. 24, 162–166.Brezzi, F., Fortin, M., 1991. Mixed and Hybrid Finite Element Methods. Springer, NY.Brooks, A., Hughes, T.J.R., 1982. Streamline upwind Petrov–Galerkin formulations for convection dominated flows with particular emphasis on the incompressible
Navier–Stokes equations. Comput. Methods Appl. Mech. Eng., 199–259.De Sampaio, P.A.B., 1991. A Petrov–Galerkin formulation for the incompressible Navier–Stokes equations using equal order interpolation for velocity and pressure.
Int. J. Numer. Methods Eng. 31, 1135–1149.De Sampaio, P.A.B., 1993. Transient solutions of the incompressible Navier–Stokes equations in primitive variables employing optimal local time stepping. In:
Proceedings of the 8th International Conference on Numerical Methods for Laminar and Turbulent Flow, pp. 1493–1504.De Sampaio, P.A.B., 2005. A finite element formulation for transient incompressible viscous flows stabilized by local time-steps. Comput. Methods Appl. Mech.
Eng. 194, 2095–2108.De Sampaio, P.A.B., 2006. A stabilized finite element method for incompressible flow and heat transfer: a natural derivation based on the use of local time-steps.
Comput. Methods Appl. Mech. Eng. 195 (44–47), 6177–6190.De Sampaio, P.A.B., Coutinho, A.L.G.A., 1999. Simulation of free and forced convection incompressible flows using an adaptive parallel/vector finite element
procedure. Int. J. Numer. Methods Fluids 29, 289–309.De Sampaio, P.A.B., Hallak, P.H., Coutinho, A.L.G.A., Pfeil, M.S., 2004. A stabilized finite element procedure for turbulent fluid–structure interaction using adaptive
time–space refinement. Int. J. Numer. Methods Fluids 44 (6), 673–693 (Chichester, UK).Gravemeier, V., 2006. Scale-separating operators for variational multiscale large eddy simulation of turbulent flows. J. Comput. Phys. 212 (2), 400–435.Grinstein, F.F., Fureby, C., Devore, C.R., 2005. On MILES based on flux-limiting algorithms. J. Numer. Methods Fluids 47 (10–11), 1043–1051.Holman, J.P., 1989. Heat Transfer. McGraw-Hill, Singapore.Hughes, T.J.R., 1995. Multiscale phenomena—Greens-functions, the Dirichlet-to-Neumann formulation, subgrid scale models, bubbles and the origins of stabilized
methods. Comput. Methods Appl. Mech. Eng. 127 (1–4), 387–401.

P.A.B. de Sampaio et al. / Nuclear Engineering and Design 238 (2008) 250–273 273
Hughes, T.J.R., Feijoo, G.R., Mazzei, L., Quincy, J.B., 1998. The variational multiscale method—a paradigm for computational mechanics. Comput. Methods Appl.Mech. Eng. 166 (1–2), 3–24.
Hughes, T.J.R., Oberai, A.A., Mazzei, L., 2001. Large eddy simulation of turbulent channel flows by the variational multiscale method. Phys. Fluids 13 (6), 1784–1799.International Atomic Energy Agency (IAEA), 2003, Use of Computational Fluid Dynamics Codes for Safety Analysis of Nuclear Reactor Systems, IAEA-TECDOC-
1379.Karipys, G., Kumar, V., 1998. Software Package for Partitioning Unstructured Graphs, Partitioning Meshes, and Computing Fill-reducing Orderings of Sparse
Matrices Version 4.0. Department of Computer Science, University of Minnesota, Minnesota, Minneapolis, USA.Korea Atomic Energy Research Institute (KAERI), 2000. Table of Nuclides, http://atom.kaeri.re.kr.Lamarsh, J., 1975. Introduction to Nuclear Engineering. Addison-Wesley, NY.Lewis, E.E., 1977. Nuclear Power Reactor Safety. John Wiley & Sons, NY.Margolin, L.G., Rider, W.J., 2002. A rationale for implicit turbulence modeling. Int. J. Numer. Methods Fluids 39 (9), 821–841.Mathieu, J., Scott, J., 2000. An Introduction to Turbulent Flow. Cambridge University Press.Orlanski, I., 1975. A rational subdivision of scales for atmospheric processes. Bull. Am. Meteorol. Soc. 56 (5), 527–530.Sagaut, P., 2001. Large Eddy Simulation for Incompressible Flows. Springer-Verlag.Wilcox, D.C., 2000. Turbulence Modeling for CFD, 2nd ed. DCW Industries, USA.Zienkiewicz, O.C., Zhu, J.C., 1987. A simple error estimator and adaptive procedure for practical engineering analysis. Int. J. Numer. Methods Eng. 24, 337–357.