Embed Size (px)
Citation preview

2I16
bc`^hTYGLVRZPWXdOgHJ
e]M[fIN\_KM[fYUQSMaf
�����ÿ����ü öú � � �� ûý� ø� þ� ÷� �ù
Walking Human Avoidance of Mobile Robot
Using A 3D Depth Flow and A Potential Feild
University of Tokyo *K.Okada T.Aoyama S.Kagami M.Inaba H.Inoue
Abstract : Three dimensional information of an environment is fundamentally important for a robot which moves
in real-world. This paper proposes 3D Depth Flow, which describes three dimensional structure and motion of a dynamic
environment, and an potential �eld based on 3D Depth Flow. Finally an experiment is shown, the robot avoids a few
walking persons using 3D Depth Flow based potential �eld.
Keywords : Moving Obstacle Avoidance, 3D Depth Flow, Potential Feild, PC-based Vision Processing
1 ����
Eô�þ[�£ÓƼ¿¦�~�?�s���ñt�×�íg�E���s��2�|£â���Sk�¤£t����ÓƼ¿��sòÿ��W�&-�m�t�@�¦cï�s�¤�ö�|��t¦JI�£|¦�����£t����û��m¦+ï� ¢òÿ��W���&-�t�¦cï�s�¤�ö�|��t¦JI�£���s�G�Eô�Øt�£òÿ�/¢m�Øt�£ÓƼ¿�0���£t�¤���ØtÓƼ¿��shá}·Ô±sÒw²wÒÔ
´Ã§ªÔºs+ï·Ô±¦�|�Kmòÿ���t�0��¤�|£t���sEô�Øt�£òÿ���t�s¨Ñ°
жÉ�û1)�shá}·Ô±¦�|�û2)��¥��{¢s+ï¦�|�©��|t+ï¦���£?�sµ½Ò+�Ľ©®ÑÃÓw�
�s7��+ï: 5���sòÿ��W�&-�t�¦u,�cï���|s�|}o��_��£t���s����òÿ��W�&-�t�¦cï�£���
å|�+ï: 5� (çv�&-�ý¡ÃÓw���) ¦lÕ�s&-�ý¡ÃÓw¦�¤��ǽԳÌÑ?� ¢s�G�Eô�Øt�£òÿ��|�sEôØt¦�¤��ÓƼ¿�ê��t¦0���£��¦.�t
2 9;62F&*�� "/3�7A�9;6C��
B.
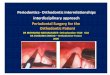
&-�ý¡ÃÓw�òÿg�o�Öe�s&-�m�t�ů¿Ñ¦.�t�¤�z��«Z�£,��+�èV¦sÃÓw@��\à��£����'�£t&-�ý¡ÃÓw¦F�N������ Fig.1�{£t{£
o P �,� t��Öe¦ Pts,� t � 1��Öe¦ Pt�1 ��
£t Pt �ÜèV=��qÞ¦ (xRpt ; yRpt)s�èV=��qÞ¦
(xLpt ; yLpt)��£�s&-�ý¡ÃÓw�{£o Pt �,� t�
��£+�s d(Pt) = (xRpt � yLpt)�s&-�t�ů¿Ñs
3Df (Pt) =�xRpt � xRpt�1
; yRpt � yRpt�1; d(Pt)� d(Pt�1)
T��
�~¡¤£t
3 9;62F&*��1��'%+$()=�@?
3.1 ÄÀɽÆÇð
ǽԳÌÑ�¦�|�¨ÄÓw»3, 4)�<ì��¡�L¦��md��Û¦�¡E�ǽԳÌÑ?¦�I�s��=�<ì��MC��|�¬¦a%�£t��¨ÄÓw»�xB���sÈÀÂÍÒw¹�ùv�è�¡sØtÓƼ¿��¬�è��sÚm�¯R���~¡¤£���å|�o�ü�¡¤£t
3.2 ÝáØÖôÂÈ°¸Ô¶²ÄÀɽÆÇã
+ï� ¢ý¡èVxN�N èQs!]+�Dy�w¡¤sèVg� x; y��+�¦ d(x; y)s&-�t�ů¿Ñ (mx;my;md)T
��£t����sÓƼ¿�P���ô¦N�N�D�Ư
·Ñ����¤��ô¦�~£tƯ·Ñ x; y; d��L¦�sPO =
P1
1+dist(x+mx;y+my;d(x;y)+md))��£t
3.3 ÄÀɽÆÇã¸Ô¶²Ùíèç
ÓƼ¿�s�$�Öe��ǽԳÌѦ���s��,����£Ç½Ô³ÌÑ���¦ú�s�����Øt�£t��s����p�¡ÓƼ¿�ØtYp¦�k�£t
4 9;62F&*��'%+$()=�1��,C�
">0�-D<5
4.1 ÈÿÁìÜòÝáØÖôÂÈ°èç½¾ÀÅ
ÓƼ¿�&-�ý¡ÃÓw¦���£����s0,ôHsÓÁµ¿HsÓƼ¿r"å|H¦���³µ½É¦�f�£���{£t���s PC¦�|�¸Ã¿«¬¨� £èV: Ue¦���£¨ÄÓw»� ¢�¤¦`I��t
4.1.1 ÛÕéÓÌÞ·MMXñõ¸º»ßÚÎêèç
øTõß'�5)¦�|�¨Ñ°Ð¶É�>iH¦~;�sÊËÐ����£ã� ¢����ª±ª¶¦� 3.2MB�¡�153KB�j �s�¡�MMX �¨¦���s�Yã¦F��t
4.1.2 SSEñõ¼ò±µÂÈ°Îêèç ntel � Pentiu-mIII(R) ÄÓ·¼±�r"�¤� SSE�¨¦����s 64biti� MMX Ò´µ¹=x{£|�ÊËÐ=y���¤�(�� 16bit¾w¹���O\b�®¦Ú�¨�0���£t�¤¦�|�Tõß'¦0U�£���s�Y�ÃÓwèV�JI�å|����t
4.1.3 ËÑæïÍ𸺻äóëïÍ &-�ý¡ÃÓw�D�H¦�ä�s�\à�¯ÐÍw´ÎÔ¥Ù¦8�£���s&-�ý¡ÃÓw��'����£y��ý¡èV�Ú
��ÃÓwèV�\�ÚóH�ä�6)¦n���t
Right ImageLeft Image
Pt-1
Pt
Disparity : xLpt
- xRpt
Optical Flow : ( xRpt
- xRpt-1
, yRpt
- yRpt-1
)
3DFlow : Pt - Pt-1
(xRpt-1 , y
Rpt-1)
(xLpt-1 , y
Lpt-1)
(xLpt , y
Lpt )
(xRpt , y
Rpt )
f (Pt)
d (Pt-1)
d (Pt)
Fig. 1: A description of 3D Flow
^ 18êz�ÓƼ¿ðéð9�ßé (200{ 9� 12zs 13zs 14z)
{771{

1A
R
2A
B
R
3A B
R
4A B
R
5 A B
R
6 A B
R
7 A
R
8 A C
R
9 A C
R
10 C
R
11 C
R
12 C
R
Fig. 3: Moving Obstacles Avoidance Experiment
(A) Image at t (B) Image at t� 1 (C) Depth image
(D) Optical ow (D) 3D Depth Flow
Fig. 2: A Result of 3D Depth Flow Generation
4.1.4 âàÒæ¹ïÍ 0#�èV¦4¢����¡&-�ý¡ÃÓw��',ô¦�X��t�æ¦ Fig.2s Table. 1�.�t0�� PentiumIII-750MHz (ë�Áµ 100MHz) ¦�|� linux 2.2.14 =����t 10[Hz]�6÷�&-�ý¡ÃÓw¦îw��£r
4.2 PC¼ìܳµßÐÊíÈÿÁ½¾ÀÅ
*��3§�ÓƼ¿ (Nomadic1� ScoutII)sµ½Ò®ÊÏs PC� £+ï: uÓƼ¿³µ½É¦R��¥�s+ïØtÓƼ¿¦�f��t
4.3 ÊíÈÿÁ¸º»Êí´»åÒ¹Ïîâ×
&-�ý¡ÃÓw��¤¦�¤��ǽԳÌÑ?¦�|£���s<ì���A�Ýt��c�òÿ��|�s�G�<ì��Ýt¦�¤���t¦0���£��¦.����0�¦���t
0��â� 3E���2�[$�£òÿ����t0���)¦ Fig.3�.�t��sÓƼ¿���2¦ê���|£��s��s 2)�,���sÓƼ¿���2�t�¦�¤��ê��t¦4��|£���¥�£t
Table 1: A Calculation Time of Each Function Of 3D
Depth Flow on PentiumIII-750MHz
Function Time Notes
LoG Filter 5.45 For 2 images
Recti�cation 20.04 Shift and rotate image
Dispairty Generation 33.47 SA 24, RA 15, 128�128 pixels
Flow Generation 16.30 SA 16, RA 8, 576 pt
Calc. 3D Depth Flow 0.53
(unit:msec): SA:Search Area, RA:Reference Area.
5 �#!�
EôJñòÿ�ñt�£ÓƼ¿��sòÿ�&-�@��ö���t�����£t����tmòÿ�&-�m��W�t�¦cï�£���å|�&-�ý¡ÃÓw¦lÕ�s�¤¦�|�<ì��&-��t�¦�¤���tJI5����s&-�ý¡ÃÓw�ö�|�ǽԳÌÑ?��~�¦lÕ��t��s3§�ØtÓƼ¿¦�|�s�G���2�[$�£òÿ���£ÓƼ¿�/¢Øt¦�|slÕ��5����H¦.��t
:8E41) \aIM, qB[@, mkZ. gl/>_%.eT+>_SDf(&+Y^/Jp$'>_<934+8;=6=0(571 2:=.bk<934ECECN, Vol. 12, No. 7, pp. 1029{1037, 1994.
2) UVdQ, WLR?. >_SDf/G,-!)_]hA/c!iKFH*"#.Oon`<934+XKjP. bk<934ECECN,Vol. 11, No. 6, pp. 856{867, 1993.
3) Oussama Khaib. Real-time obstacle avoidance for manipulatorsand mobile robots. International Journal of Robotics Research,Vol. 2, No. 1, pp. 57{72, 1986.
4) Y.Kitamura, T.Tanaka, F.Kishino, and M.Yachida. 3-d pathplanning in a dynamic environment using an octree and an ar-ti�cial potential �eld. In Proc. of the Int. Conf. on IntelligentRobots and Systems (IROS-95), pp. 474{481, 1995.
5) O. Faugeras, B. Hots, H. Mathieu, T. Vi�eville, Z. Zhang, P. Fua,E. Th�eron, L. Moll, G. Berry, J. Vuillemin, P. Bertin, andC. Proy. Real Time Correlation-Based Stereo: Algorithm, Im-plementations and Applications. Technical Report N�2013, IN-RIA, 1993.
6) R. Bolles and J. Wood�ll. Spatiotemporal Consistency Checkingof Passive Renge Data. In T. Kanade and R. Paul, editors,Robotics Research: The Sixth International Symposium, pp.165{183. International Foundation for Robotics Research, 1993.
{772{