Embed Size (px)
Citation preview

A bioenergetic model for simulating athletic performanceof intermediate duration
Gilbert Gede n, Mont HubbardUniversity of California Davis, Mechanical and Aerospace Engineering, 1 Shields Ave, Davis, CA 95616, United States
a r t i c l e i n f o
Article history:Accepted 17 September 2014
Keywords:Bioenergetics ModelFatigueSimulationMuscle ModelAthletic Performance
a b s t r a c t
Simulating factors affecting human athletic performance, including fatigue, requires a dynamic model ofthe bioenergetic capabilities of the athlete. To address general cases, the model needs inputs, outputs,and states with a set of differential equations describing how the inputs affect the states and outputs asfunctions of time. We improve an existing phenomenological muscle model, removing unnecessarily fastdynamic behavior, adding force–velocity dependence, and generalizing it to task level activities. Thismakes it more suitable for simulating and calculating optimal strategies of athletic events of mediumduration (longer than a sprint but shorter than a marathon). To examine the validity and limitations ofthe model, parameters have been identified from numerical fits to published experimental data.
& 2014 Elsevier Ltd. All rights reserved.
1. Introduction
When considering athletic events that involve racing againstthe clock such as a 5 km road race or cycling time trial, thefollowing question inevitably arises: what is the optimal pacingstrategy? Commonly practiced strategies range frommaintaining aconstant power output to finishing with a sprint. The question isespecially difficult to answer in situations where the athlete'sspeed and power output vary over the duration of the event (e.g.,a course with hills or wind). The first step in answering it consistsof determining a model to represent the athlete's energeticdynamics in the event.
Numerous authors have examined competitive athletic pacing. Arunner's optimal strategy for different distances was calculated andthe results were compared to the then current world records (Keller,1974). This model used the concept of an oxygen debt. Anaerobicmetabolism effects on energy production have also been investi-gated (Ward-Smith, 1999), but in a manner which is not applicableto longer events or events with a variable power output. Theminimum time problem for running has been studied using thecritical power model by Morton (2009) who found that the optimalsolution is all-out for the entire race. All these efforts have limita-tions, either in fidelity or extensibility to more complex events.
Simulating an athlete's performance in a general situationrequires a dynamic model with a control input which governs
the athlete's output. While such dynamics models have existed fordecades, a more recent approach (Liu et al., 2002) divides themuscle into three compartments: resting, active, and fatigued. Thismodel has also been extended (Xia and Frey Law, 2008) to includemultiple muscle fiber types and the control logic required toactivate the fibers in a realistic fashion. More recently, a 4 compart-ment, single fiber type model was proposed which appears tofaithfully replicate experimental behavior (Sih et al., 2012).
However, if the goal is to perform optimal control calculationswhich can tell an athlete what power output, as a function of time,they should produce to achieve the minimum elapsed time in acycling time trial, none of these models are appropriate. Themodels above all have significant weaknesses which prevent themfrom filling this role. To best answer the question, “what is theoptimal strategy?”, we present a new phenomenological modelwhich represents as much behavior as needed and no more.
In this paper, we present a new dynamic model, designed foranswering pacing strategy questions. It is an improvement of theexisting phenomenological model of Xia and Frey Law (2008); it ismore appropriate for general simulation and use in optimalcontrol calculations. It does not attempt to replace current knowl-edge on muscle physiology, nervous system control, or decades ofclinical experiments. Instead, it attempts to represent what anathlete can do, without considering the details of the physiologicalmechanisms of how this happens. Compared to current models, itremoves unnecessary detail and adds important features. A limitedvalidation using published experimental data is shown. Finally,interpretations of the identified physiological parameters arediscussed.
Contents lists available at ScienceDirect
journal homepage: www.elsevier.com/locate/jbiomechwww.JBiomech.com
Journal of Biomechanics
http://dx.doi.org/10.1016/j.jbiomech.2014.09.0170021-9290/& 2014 Elsevier Ltd. All rights reserved.
n Corresponding author.E-mail addresses: [email protected] (G. Gede),
[email protected] (M. Hubbard).
Journal of Biomechanics 47 (2014) 3448–3453

2. Methods
A qualitative overview of the model is first presented, followed by a mathematicaldescription, and the methods used for its validation.
2.1. Background
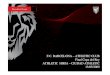
Compartment theory has been used for modeling a single muscle (Liu et al.,2002; Xia and Frey Law, 2008). Each motor unit (MU) pool within the muscle is acollection of a finite number of similar fibers, but for modeling purposes it isconvenient to treat it instead as continuous. The continuous pool is apportionedinto three compartments: resting fraction Mr, active fraction Ma, and fatiguedfraction Mf. The dynamics of the model describe the transfer between compart-ments: active muscle becoming fatigued, fatigued muscle recovering, and restingmuscle becoming active. Fig. 1 shows a schematic of this process during and after amaximal effort exercise.
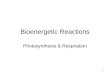
We have taken the approach of Xia and Frey Law (2008) a step further byapplying it to groups of muscles, and use a 3 compartment model with multipleMU pools to represent task-level activities such as cycling, as the model of Sih et al.(2012) did with success. The fundamentals of the 3 compartment model areunchanged: the amount of force produced is proportional to the amount of activemuscle, the rate at which fatigue accrues is proportional to how much muscle isactive, and the rate of recovery is proportional to the current level of fatigue. Thereare differences in the model we present however, in the rate of activation,elimination of redundant quantities, and the inclusion of the force–velocity curve,among other changes. Additionally, the original model was developed for examin-ing the behavior of motor unit pools within a single muscle. The present model wasformulated with the assumption it could also represent a group of muscles. Fig. 2shows how the compartments are allocated within a single motor unit pool.
2.2. Model dynamics
Unlike the Xia and Frey Law (2008) model, we assume there are only slow andfast fibers (but no intermediate ones). The quantities involved with the slowoxidative fiber MU pool are identified by a superscript o and the fast glycolytic fiberMU pool quantities by a superscript g. The differential equations for the single statevariable for each pool, the fatigued muscle fraction Mf, are
dMgf
dt¼Mg
aFg�Mg
f Rg ð1aÞ
dMof
dt¼Mo
aFo�Mo
f Ro ð1bÞ
where Fg, Rg and Fo, Ro are the fatigue and recovery rates for the fast and slow fibertypes, respectively. As will be shown, only one differential equation per pool isrequired. This has been accomplished by removing mathematically redundantequations and instead partitioning the motor unit pools into fatigued and non-fatigued compartments (where it is assumed the non-fatigued compartment can beinstantaneously apportioned between resting and active).
This model, which has 3 compartments per pool, can be represented with onlyone state variable for each MU pool for two reasons. First, there is clearly aredundant state, due to the total muscle size constraint
1¼MaþMf þMr ð2Þ
making one state dependent on the other two.Second, by not considering the rate of muscle activation, Ma no longer needs to
be considered a state variable. The purpose of the present model is to simulateathletic events of medium duration (longer than a sprint but shorter than amarathon). We claim that the sub-second (much shorter than a second) timedynamics of muscle fiber recruitment are not relevant to athletic events of this andlonger durations. If these sub-second dynamics are not considered, the non-fatigued muscle in a MU pool can be instantaneously split between the activeand resting compartments. This allows for the control input to the system to simplybe the amount of active muscle Ma, rather than the recruitment rate of activemuscle.
These new control inputs (Ma for each fiber type) have constraints. Within eachpool the amount of active muscle must be non-negative, and it cannot be greaterthan the amount of non-fatigued (i.e. available for recruitment) muscle
0rMgar1�Mg
f ð3aÞ
0rMoar1�Mo
f ð3bÞ
There is also a constraint imposed by the prioritization of fiber recruitment.Previous compartment models have used a logic sequence to enforce the correctorder of fiber recruitment (Henneman et al., 1965). The following constraint
equation enforces the same behavior:
Mga Mo
aþMof �1
� �¼ 0 ð4Þ
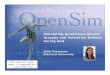
The allowable space for the control inputs to the system is shown as a bold linein Fig. 3.
This constraint enforces that the amount of active fast fiber can be nonzero onlywhen all of the slow fibers are active. Using a constraint equation is necessarywhen applying optimal control techniques, because logic sequences introduce non-smoothness, possibly preventing an optimal solution from being found. Outsideoptimal control applications, an equivalent logic sequence is acceptable.
The final change from other compartment models is the incorporation of theforce–velocity curve within the equations. For medium duration events an athleteis unlikely to spend time at either extreme of the force–velocity curve, and weclaim that an exponential force–velocity approximation is sufficient. This allows the
Fig. 1. A schematic representation of muscle transfer between compartments before,during, and after a maximal effort exercise. Initially the muscle is completely at rest.Once maximum effort starts, no muscle is at rest, and fatigue builds up. At the end ofthe effort period, recovery begins with active muscle being released and fatiguedmuscle recovering.
Fig. 2. A visualization of the compartments within a MU pool. The bar dividing thefatigued and non-fatigued compartments moves down at a rate which is thedifference of the recovery ðMf RÞ and fatigue ðMaFÞ. The system control Ma isbounded between zero and the amount of non-fatigued muscle. The restingcompartment Mr is simply the non-active, non-fatigued fraction.
G. Gede, M. Hubbard / Journal of Biomechanics 47 (2014) 3448–3453 3449

final muscle model output force to be expressed as
F ¼ Sg0Mgae
� cgvþSo0Moae
� cov ð5Þwhere S0g, cg and S0o, co are the muscle size and force–velocity curve coefficients, forthe fast g and slow o fibers respectively, v is the muscle speed (or an analog thereof,such as crank speed when cycling or ground speed when running, which is alwayspositive), an exogenous input, and F is the muscle force output.
2.3. Validation methods
The validation presented below consists of selecting appropriate experimentaldata, solving equations, and numerical parameter fitting. Because it is difficult tomeasure the individual activation amount of both slow and fast motor unit pools,we have limited the types of experiments used for validation. The selectedexperiments are maximal effort tests, in which the amount of active muscle willalways be the maximum possible for both fiber types: Ma ¼ 1�Mf , i.e. Mr¼0. Byselecting maximal effort tests with recorded force or power outputs and recordedvelocities (or analogs thereof), the parameter fitting process will identify Fo, Fg, Ro,Rg, co, cg, S0o, and S0g in (1) and (5). However, the model in general is not limited tothe maximal effort case.
The experiments are task level (cycling) activities, involving collections of jointgroups which are themselves collections of muscles. Thus far, the model has beenintentionally described without a scale of application. For the task level activity ofcycling, we attempt to show that this level of model abstraction can accuratelyrepresent the combined behavior of all the muscles involved.
At this point, two substitutions in the equations will be introduced, in order touse them with cycling. The muscle force output F is instead substituted with cranktorque T, and muscle velocity v with crank angular velocity (speed) ω. Thisrepresents a transformation from linear to rotational variables; aside from thechange in symbols and units Eq. (5) is unaffected.
Because the differential equations presented here are relatively simple, theycan be solved exactly both during maximal effort tests and during rest. Aftersolving the differential equations for Mf
o and Mfg, the amount of active muscle is
found from Ma ¼ 1�Mf . The total torque output is the sum of the torque output ofeach fiber type. During a maximal effort test the solution to the differentialequations for a single MU pool (one fiber type) is
Mf ðtÞ ¼F
FþRþ Mf ðt0Þ�
FFþR
� �e�ðt� t0 ÞðFþRÞ ð6Þ
The output torque for each MU pool is then
TðtÞ ¼ S0e� cωðtÞð1�Mf ðtÞÞ ð7Þ
When starting from a fully rested state there is no fatigued muscle andMf ðt0Þ ¼ 0. To find Mf at time t during a rest period, after exertion ending at t1,the differential equations are again solved to yield
Mf ðtÞ ¼Mf ðt1Þe�Rðt� t1 Þ ð8Þ
We also show two quantities which are calculated from the model parameters:the steady-state force fraction and the time constant. The steady-state force outputfor each fiber type is defined as G¼ 1�ðF=ðFþRÞÞ. This is the force that can be stillproduced by each fiber type when the athlete has reached the maximumsustainable level of fatigue. The time constant for each fiber type, defined as
τ¼ 1=ðFþRÞ, is the time constant of the exponential decay to the steady-state forceoutput, when the muscle is at maximum effort (see Fig. 1). The fiber type with thesmaller time constant (shorter period) is the faster fiber, as it will take less time tobecome fatigued.
We now have an expression (7) for the torque output of each fiber type as afunction of time and crank speed assuming that the system parameters are known.A least squares algorithm will be used to compute parameters to fit the experi-mental data, scipy:optimize:leastsq (Jones et al., 2001). The eight modelparameters (S0, c, F, and R for the two fiber types) are found by comparing thepredicted torque based on the exact solutions of the differential equations to theexperimental torque. The error is simply the difference between the measured andthe predicted torque at each time. Because our model does not consider muscleactivation time, we consider the experimental data only after the peak torque hasbeen reached.
2.4. Experiments
Two experiments suitable for validation have been published, both using acycling ergometer where power was a quadratic function of crank speed: P ¼ rω2.The power dissipated P is the product of a resistance r and the speed ω squared.Unlike Coulomb friction-braked ergometers, this type of ergometer is associatedwith a gradual decrease in crank torque produced by the athlete over a maximumeffort test. In contrast, friction-braked ergometers show an initial peak in torque(due to flywheel acceleration), followed by a constant torque (maintainingequilibrium against friction), then an abrupt end (inability to maintain the torquerequired to balance friction).
One experiment (variable tempo) consisted of maximum effort tests at threeresistive loads, with fully rested subjects (Vanhatalo et al., 2008). Power and speedwere recorded while subjects performed with low, medium, and high resistances,giving high, medium, and low peak speeds and end-test speeds (see Fig. 4). Asimilar experiment (rest interval) used different subjects (see Fig. 6). It involvedperiods of maximum effort expenditure separated by rest intervals varying induration (Vanhatalo and Jones, 2009). In each test fully rested subjects exercised atmaximal effort for 30 s, followed by a rest period of either 2 or 15 min, followed byanother maximal effort exercise for 3 min. For a fully rested athlete, it was assumedthat the 30 s expenditure was identical during each test, and was identical to thefirst 30 s of a 3 min control test.
Data from the figures in each publication were digitized using software(Tummers, 2006). In both experiments the figures displayed results averagedacross many subjects. Individual subject data would be preferable for thesevalidation analyses, but we believe there are still worthwhile insights to be gainedfrom examining the averaged data.
3. Results
For both experiments crank torque was computed by dividingthe reported power by the reported crank speed. A least squares fitwas used to compute a single set of eight model parameters (fourfor each MU pool) in each experiment. To show the ability of themodel to work over a range of muscle speeds and recoveryperiods, parameters were found using the data from all tests. For
Fig. 3. Allowable configuration space for the two inputs, Mao and Ma
g, is shown bythe bold line. This configuration space enforces the prioritized recruitmentbehavior required by the Henneman et al. (1965) size principle.
Fig. 4. Crank speed from three tests with different ergometer resistances, leadingto different tempos (Vanhatalo et al., 2008).
G. Gede, M. Hubbard / Journal of Biomechanics 47 (2014) 3448–34533450

both experiments, the identified parameters which were eithervery large or very small in magnitude were rounded to infinity or0, respectively. The difference between the exact output of theleast squares solver and the rounded parameters was less thanmachine precision, justifying the use of the rounded parameters.
The variable tempo experiment included power and speed frommaximal effort cycling ergometer tests (Vanhatalo et al., 2008).Fig. 4 displays the speed ω in the tests, the exogenous input termused in parameter identification. Fig. 5 displays torque for the threetests, found by dividing the reported power by the speed. Alsoplotted are the fit lines showing the predicted model torqueresulting from parameter identification. The RMS torque predictionerror is 0.49 Nm. The variable tempo parameters are in Table 1.
The rest interval experiment also measured power and speedfrom maximal effort cycling ergometer tests (Vanhatalo and Jones,2009). Fig. 6a and b shows the calculated speed, derived from thereported power and maximum speed, using the equation definingthe ergometer's power/speed relationship. Fig. 6c and d portraysthe torque, calculated by dividing the recorded power by calculatedspeed. Also plotted in Fig. 6c and d are the fit lines for predictedtorque from the identified parameters. Fig. 6a and c shows speedand torque from the 30 s effort; Fig. 6b and d plots speed and torquefrom the 3 min efforts. The RMS torque prediction error is 0.37 Nm.The rest interval parameters are also in Table 1.
4. Discussion
In formulating the model, we have assumed that equationswhich govern the behavior of MU pools within a single muscle
could also be used to describe the behavior of a muscle group ortask level activity involving many muscle groups (which each havetheir own MU pools). Even though the original model (Xia and FreyLaw, 2008) referred to individual muscles, we cannot claim ourmodel represents individual muscles, because it has not beenexperimentally validated on this scale. Instead, we only examinethe model's ability to replicate the behavior of task level activities.The success of this model in fitting the examined experimentalbehavior shows that it is apparently able to represent such anactivity (cycling).
For each experiment, the distinction between the slow and fastMU pools is made by examining the time constants. The pool whichreaches full fatigue sooner is the fast pool, generally identified by asmaller time constant τ.
Examining the parameters found from the variable tempoexperiment (Table 1), we see that a relatively large isometricmuscle size S0 has been found for the fast fibers, compared to thatof the slower fiber MU pool. The faster muscle pool has a timeconstant of 17.8 s and a static torque capability of 371 Nm. Theslower pool's time constant is much longer, 162 s, with a muchsmaller static torque capacity of 9.58 Nm.
Admittedly, the variation in MU pool size does not seem to bereasonable: the value for S0 for the fast fiber MU pool isapproximately 40 times that of the slower MU pool. While thesestatic torque values appear to be significantly different than whatmight be expected physiologically, they must be viewed in thecontext of the force–velocity curve approximation. For the averagecrank speed in the standard target speed run, the actual torque,Se� cω, is lower for each MU pool: 82.2 Nm for the fast pool, and7.91 Nm for the slow pool. This is shown more clearly in Fig. 7,where the force velocity curve for each fiber type is plotted againstthe speed range for the experiments. Also indicated are theaverage crank speed and the time distribution of the crank speed.This indicates that the operational difference between S0 for theslow and fast fiber groups is not as large as the parameters wouldsuggest. Discrepancies such as this are to be expected, because themodel contains an approximation to the force velocity curve.
Interestingly, when fitting parameters to a single one of thethree variable tempo tests, the identified force–velocity curveparameter c and recovery coefficients R are very small. This showsthat these model components, recovery and the force–velocitycurve, come into play only when used with test data which exhibitrecovery behavior or significantly different speed ranges.
The rest interval experiment was conducted with different subjectsfrom those in the variable tempo ones, and thus identical parametersshould not be expected. In this experiment very small force–velocitycoefficients were identified for both MU pools. Additionally, the slowMU pool showed very large fatigue and recovery rate coefficients. It isimportant to recognize though that these coefficient only appear asparts of terms in (6). Therefore the magnitude of the coefficients is lessimportant than how they interact within that equation. The previouslydefined terms G and τ (steady-state force output and time constant)provide an interpretation of these ratios. In this experiment the fastMU pool has a time constant of 34.8 s, the slow MU pool has a timeconstant of essentially 0 s. At first glance, this seems to be inconsistentwith the previous definition of fast and slow fibers. However, there is asteady-state force output of 100% for the slow pool. This indicates thatthe slow pool immediately reaches its steady-state value, which isequal to its unfatigued value. Its maximum force output does notchange.
Between the two experiments (variable tempo and rest inter-val) there is a similar size ratio between the slow and fast fibers.Over the operational speed ranges, the rest interval experimentshows a factor of 4 between fast and slow pool torque outputs,while the variable tempo experiment shows a factor of 10 betweenfast and slow pool torque outputs. The fast MU pool fatigue rate
Fig. 5. Experimentally calculated (data from Vanhatalo et al., 2008) and model fittorque for three maximal effort tests with different ergometer resistances.
Table 1Parameters generated by least squares fit of experimental data for both the variabletempo experiment and the rest interval experiment.
Parameter Variable Resttempo test interval test
Slow Fast Slow Fast
S0 (N m) 9.58 371 10.2 42.3F ðs�1Þ 0.0062 0.042 1.7Eþ5 0.017
R ðs�1Þ 0 0.014 Inf 0.012
c ðs�1Þ 0.0186 0.146 0 0G 0 0.25 1 0.407τ (s) 162 17.8 0 34.8
G. Gede, M. Hubbard / Journal of Biomechanics 47 (2014) 3448–3453 3451

coefficients identified from the experiments are of the same orderof magnitude: 0.042 vs. 0.017. Also, in both experiments the slowfibers are found to have little or no decrease in force productionover the test duration; only the fast fibers fatigue appreciably.Considering all these points, there is some reassurance in themodel's self-consistency across various test conditions.
4.1. Examination of reduced models
Examining the results in Table 1 should raise concerns over theaccuracy of a human energetics model which involves coefficientsof 0 or infinity. In addition to the preceding discussion of the fitparameters, we have examined how the results of the fittingprocess are influenced by examining the maximal effort case;specifically how some model components combine, which leads tothese unrealistic parameters.
By examining the parameters when considering only the fully-rested case (i.e. Mf ðt0Þ ¼ 0), the analytic solutions to the differ-ential equations are greatly simplified. When there is no initialfatigue, the torque output equation can be rewritten in terms of Gand τ; for a single MU pool, the torque output is
TðtÞ ¼ S0e� cωðtÞ Gþð1�GÞe� t=τ� �
ð9Þ
Re-examining the parameters in Table 1, we can see how theidentification of slow and fast fibers can be made. For the variable
Fig. 6. Experimentally calculated speeds (a and b) and experimentally calculated and numerically fit torques (c and d) for 30 s and subsequent 3 min maximal effortexpenditures, after different rest intervals (experimental data from Vanhatalo and Jones, 2009). Note that the 30 s data is assumed to be identical in both cases, as theathletes were completely rested before each test.
Fig. 7. Fast and slow MU pool force–velocity curves identified from the variabletempo experiment. Also indicated are the average speed (dashed line) and thedistribution of speeds (shaded grey) over the experiment. There is a largedifference between the fast and slow static torque parameters S0, 370 N m and10 N m. As the static torque parameter appears in S0Mae� cω , their output isreduced by the force–velocity curve. In this case, over the main operating range(9–11 rad/s) the difference between product of the static torque parameter and theforce velocity curve approximation of the slow and pools is 80 N m and 8 N m, amuch smaller difference than the base values of S0 suggest.
G. Gede, M. Hubbard / Journal of Biomechanics 47 (2014) 3448–34533452

tempo experiments, the slow fibers' torque output isTðtÞ ¼ 9:58e0:0186ωðtÞe� t=162 and the fast fibers' torque output isTðtÞ ¼ 371e0:146ωðtÞ 0:25�0:75e� t=17:8
� �. Examining these equations
shows that the fast fibers will clearly reach their steady-stateoutput sooner. However, if these model parameters were used in alonger simulation, the model would become inaccurate, as itwould suggest that all the slow fibers would be fatigued and onlyfast fibers would generate torque – something that is not con-sistent with physiology. One clear conclusion to draw from this isto generate the parameters from longer test sessions.
For the rest interval experiments, we obtain the followingequations: the slow MU pool torque is TðtÞ ¼ 10:2 and the fast MUpool torque is TðtÞ ¼ 42:3 0:407þ0:593e� t=34:8
� �. The slow MU pool
is identified as the pool which shows increased resistance to fatigue.In this case it shows no change at all! The fast MU pool does showsigns of fatigue however.
This raises the question: is there a need for the complete modelthat has been presented in this paper? The answer is unequi-vocally yes. It is important to remember that these submodels arethe result of the numerical parameters being substituted into thesolutions to the differential equations solved for the maximaleffort case. There are no simpler forms of the differential equationswhich can be solved and manipulated into all the forms above.This reduced model analysis does reveal some model weaknesses.In many dynamic systems when the inputs are saturated thesolutions to the differential equations become simplified. This iswhat has happened here. This also shows that the model needsmore thorough parameter identification tests; the parametersshown for the maximal effort case are not completely translatableto the general case (i.e. non-maximal effort). Parameter identifica-tion studies are more effective when the system inputs are known.Because we have not considered the mechanisms for MU poolactivation, the inputs in this case cannot be known exactly. Thismight be a potential weakness of the present model whenattempting to find parameters in more general applications.
5. Conclusions and future work
We have presented a model which reproduces the experimen-tal dynamic energetic behavior of human subjects while cycling,displaying both fatigue and recovery behavior. Although furthervalidation of the model is required, we believe it may be as capableas other more complex models, that it is more appropriate fordynamic simulations of intermediate duration events, and that it isbetter suited for optimal control usage.
The model has been validated against data from only twoexperiments, and some deficiencies are apparent. Neither experi-ment completely explores all possible behaviors of the model: oneexperiment exercised more completely the force–velocity behaviorand the other focused on recovery periods. In each case there aresome model deficiencies regarding the unexercised behaviors. Anobvious next step would be to conduct experiments which explore
a wider range of recovery periods, target muscle speeds, and non-maximal exertion.
Successfully predicting new behaviors, and not just demonstrat-ing the ability to generate a close fit, would provide the strongestvalidation. This could be done in a number of ways, but determiningthe model parameters for a test subject would always be the startingpoint. Validation could then be accomplished by using differentrecovery periods for a rest interval style test, at multiple tempos. Amore complex experiment might involve a period of steady-statenon-maximal effort inducing partial fatigue, followed by a period ofmaximal effort. If the subsequent maximal effort exercise wasaccurately predicted then the model would be further validated.
Conflicts of interest statement
The authors have no conflicts of interest to report.
Acknowledgments
The authors would like to thank Prof. George A. Brooks fordiscussions on human physiology, and Prof. David Hawkins forvaluable advice on modeling.
References
Henneman, E., Somjen, G., Carpenter, D., 1965. Functional significance of cell size inspinal motoneurons. J. Neurophysiol. 19 (5), 560–580, URL: ⟨http://www.neurosciences.us/courses/systems/SensoryMotor/henneman.pdf⟩.
Jones, E., Oliphant, T., Peterson, P., et al., 2001. SciPy: Open Source Scientific Toolsfor Python. URL: ⟨http://www.scipy.org⟩.
Keller, J., 1974. Optimal velocity in a race. Am. Math. Mon. 81 (5), 474–480URL: ⟨http://www.jstor.org/stable/2318584⟩.
Liu, J.Z., Brown, R.W., Yue, G.H., 2002. A dynamical model of muscle activation,fatigue, and recovery. Biophys. J. 82 (May (5)), 2344–2359, URL: ⟨http://www.pubmedcentral.nih.gov/articlerender.fcgi?artid=1302027&tool=pmcentrez&rendertype=abstract⟩.
Morton, R.H., 2009. A new modelling approach demonstrating the inability to makeup for lost time in endurance running events. IMA J. Manag. Math. 20 (August(2)), 109–120, URL ⟨http://imaman.oxfordjournals.org/cgi/doi/10.1093/imaman/dpn022⟩.
Sih, B., Ng, L., Stuhmiller, J., 2012. Generalization of a model based on biophysicalconcepts of muscle activation, fatigue and recovery that explains exerciseperformance. Int. J. Sports Med. 33 (4), 258–267, URL ⟨http://www.ncbi.nlm.nih.gov/pubmed/22403006⟩.
Tummers, B., 2006. DataThief III. URL ⟨http://datathief.org⟩.Vanhatalo, A., Doust, J.H., Burnley, M., 2008. Robustness of a 3 min all-out cycling
test to manipulations of power profile and cadence in humans. Exp. Physiol. 93(March (3)), 383–390, URL ⟨http://www.ncbi.nlm.nih.gov/pubmed/17951327⟩.
Vanhatalo, A., Jones, A.M., 2009. Influence of prior sprint exercise on the para-meters of the 'all-out critical power test' in men. Exp. Physiol. 94 (February (2)),255–263, URL ⟨http://www.ncbi.nlm.nih.gov/pubmed/18996948⟩.
Ward-Smith, A., 1999. The kinetics of anaerobic metabolism following the initiationof high-intensity exercise. Math. Biosci. 159 (June (1)), 33–45, URL ⟨http://linkinghub.elsevier.com/retrieve/pii/S0025556499000152⟩.
Xia, T., Frey Law, L.a., 2008. A theoretical approach for modeling peripheral musclefatigue and recovery. J. Biomech. 41 (October (14)), 3046–3052, URL ⟨http://www.ncbi.nlm.nih.gov/pubmed/18789445⟩.
G. Gede, M. Hubbard / Journal of Biomechanics 47 (2014) 3448–3453 3453