Embed Size (px)
Citation preview
Tokamak profile database constructionincorporating Gaussian process regression
A. Ho1, J. Citrin1, C. Bourdelle2, Y. Camenen3, F. Felici4, M.Maslov5, K.L. van de Plassche1,4, H. Weisen6 and JET
Contributors∗
1DIFFER - Dutch Institute for Fundamental Energy Research, Eindhoven, The Netherlands2CEA, IRFM, Saint Paul Lez Durance, France
3IIFS/PIIM, CNRS - Universite de Provence, Marseille, France4Eindhoven University of Technology, Eindhoven, The Netherlands
5EURATOM-CCFE Fusion Association, Culham Science Centre, Abingdon, UK6Swiss Plasma Centre, EPFL, Lausanne, Switzerland
∗See the author list of Overview of the JET results in support to ITER by X. Litaudon et al. to be publishedin Nuclear Fusion Special issue: overview and summary reports from the 26th Fusion Energy Conference
(Kyoto, Japan, 17-22 October 2016)
May 31, 20171 / 13

Using NNs to accelerate of turbulent transport coefficient estimation
Goal: Emulate linear gyrokinetic (GK) turbulence simulations usinghigh-dimensional (>20D) neural networks (NN)
J. Citrin, S. Breton, F. Felici, et al.,
“Real-time capable first principle based
modelling of tokamak turbulent trans-
port,” Nuclear Fusion, vol. 55, no. 9,
p. 092 001, 2015
I Improves tractability of calculationsI Off-line discharge optimizationI Controller design and / or real-time control
I Lots of data needed to train NN, limited by cost of GK simulationsI Discharge data repositories =⇒ simulation inputs in relevant
subspace
2 / 13

Workflow of data extraction from large repositories
Dischargeselection
∼ 2500
Timewindowselection
∼ 7 perdischarge
Profilefitting
∼ 15% loss
Sanity andconsistency
checks
∼ 50% loss?
Profile database,training set
sampling
Quality profilesubset forvalidation
Parameters: Te,i, ∇Te,i, ne,i,imp, ∇ne,i,imp, q, s, ωtor, SQ,n, etc...
Important to obtain reliable error estimates on derivative quantities!
3 / 13

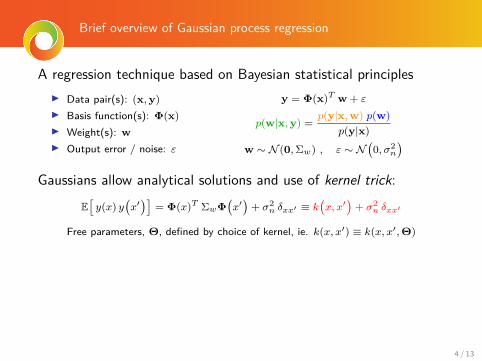
Brief overview of Gaussian process regression
A regression technique based on Bayesian statistical principlesI Data pair(s): (x,y)I Basis function(s): Φ(x)I Weight(s): wI Output error / noise: ε
y = Φ(x)T w + ε
p(w|x,y) =p(y|x,w) p(w)
p(y|x)
w ∼ N (0,Σw) , ε ∼ N(0, σ2
n
)
Gaussians allow analytical solutions and use of kernel trick:
E[y(x) y
(x′)]
= Φ(x)T ΣwΦ(x′)
+ σ2n δxx′ ≡ k
(x, x′
)+ σ2
n δxx′
Free parameters, Θ, defined by choice of kernel, ie. k(x, x′) ≡ k(x, x′,Θ)
Making predictions of y∗ given x∗:K(x,x) = k
(x = x, x′ = x
)y∗ = K(x∗,x)
[K(x,x) y + σ2
nI]
V[y∗] = K(x∗,x∗)−K(x∗,x)[K(x,x) + σ2
nI]−1
K(x,x∗)
4 / 13
Brief overview of Gaussian process regression
A regression technique based on Bayesian statistical principlesI Data pair(s): (x,y)I Basis function(s): Φ(x)I Weight(s): wI Output error / noise: ε
y = Φ(x)T w + ε
p(w|x,y) =p(y|x,w) p(w)
p(y|x)
w ∼ N (0,Σw) , ε ∼ N(0, σ2
n
)Gaussians allow analytical solutions and use of kernel trick:
E[y(x) y
(x′)]
= Φ(x)T ΣwΦ(x′)
+ σ2n δxx′ ≡ k
(x, x′
)+ σ2
n δxx′
Free parameters, Θ, defined by choice of kernel, ie. k(x, x′) ≡ k(x, x′,Θ)
Making predictions of y∗ given x∗:K(x,x) = k
(x = x, x′ = x
)y∗ = K(x∗,x)
[K(x,x) y + σ2
nI]
V[y∗] = K(x∗,x∗)−K(x∗,x)[K(x,x) + σ2
nI]−1
K(x,x∗)
4 / 13

Brief overview of Gaussian process regression
A regression technique based on Bayesian statistical principlesI Data pair(s): (x,y)I Basis function(s): Φ(x)I Weight(s): wI Output error / noise: ε
y = Φ(x)T w + ε
p(w|x,y) =p(y|x,w) p(w)
p(y|x)
w ∼ N (0,Σw) , ε ∼ N(0, σ2
n
)Gaussians allow analytical solutions and use of kernel trick:
E[y(x) y
(x′)]
= Φ(x)T ΣwΦ(x′)
+ σ2n δxx′ ≡ k
(x, x′
)+ σ2
n δxx′
Free parameters, Θ, defined by choice of kernel, ie. k(x, x′) ≡ k(x, x′,Θ)
Making predictions of y∗ given x∗:K(x,x) = k
(x = x, x′ = x
)y∗ = K(x∗,x)
[K(x,x) y + σ2
nI]
V[y∗] = K(x∗,x∗)−K(x∗,x)[K(x,x) + σ2
nI]−1
K(x,x∗)
4 / 13
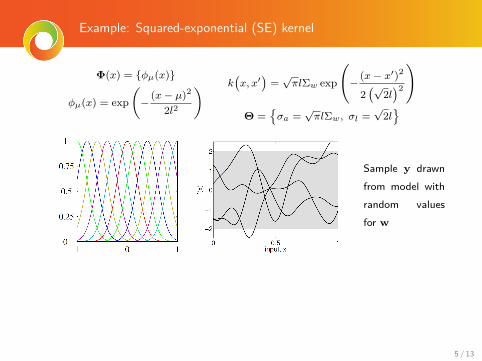
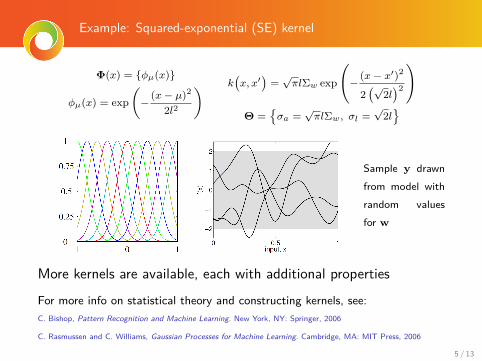
Example: Squared-exponential (SE) kernel
Φ(x) = {φµ(x)}
φµ(x) = exp(−
(x− µ)2
2l2
) k(x, x′
)=√πlΣw exp
(−
(x− x′)2
2(√
2l)2
)Θ =
{σa =
√πlΣw, σl =
√2l}
Sample y drawnfrom model withrandom valuesfor w
More kernels are available, each with additional properties
For more info on statistical theory and constructing kernels, see:C. Bishop, Pattern Recognition and Machine Learning. New York, NY: Springer, 2006
C. Rasmussen and C. Williams, Gaussian Processes for Machine Learning. Cambridge, MA: MIT Press, 2006
5 / 13
Example: Squared-exponential (SE) kernel
Φ(x) = {φµ(x)}
φµ(x) = exp(−
(x− µ)2
2l2
) k(x, x′
)=√πlΣw exp
(−
(x− x′)2
2(√
2l)2
)Θ =
{σa =
√πlΣw, σl =
√2l}
Sample y drawnfrom model withrandom valuesfor w
More kernels are available, each with additional properties
For more info on statistical theory and constructing kernels, see:C. Bishop, Pattern Recognition and Machine Learning. New York, NY: Springer, 2006
C. Rasmussen and C. Williams, Gaussian Processes for Machine Learning. Cambridge, MA: MIT Press, 2006
5 / 13

Optimizing the kernel hyperparameters using gradient-ascent
Denominator of Bayes’ Theorem is called the marginal likelihood:
p(y|x) =∫p(y|x,w) p(w) dw
Combined with Gaussian assumptions gives log-marginal-likelihood:
log p(y|x) = − 12 yT
(K + σ2
nI)−1 y− 1
2 log∣∣K + σ2
nI∣∣− 1
2nx log 2π
Goodness of fit Kernel complexity Size of data set
Cost function =⇒ maximized w.r.t the hyperparameters, Θ:I One of many ways to determine ΘI Gives Θ with maximum probability to match input dataI Gradient ascent search algorithm implemented with Monte
Carlo kernel restarts to ensure non-local maxima6 / 13
Choice of kernels used to fit experimental profiles
Rational Quadratic: k(x, x′
)= σ2
(1 +
(x− x′)2
2αl2
)−α, Θ = {σ, α, l}
I Imposes required smoothness for sufficiently large lI Higher degree of flexibility compared to Squared-ExponentialI Fails to provide good fits through pedestal when present
Gibbs:k(x, x′
)= σ2 exp
((x− x′)2
2l2
)l = l0 − l1 exp
((x− µ)2
2σ2l
), Θ = {σ, l0, l1, σl}
I Imposes general smoothness through sufficiently large l0I Allows rough pedestal fitting by reduction of l near LCFSI Not perfectly reliable, but provides a decent estimate
7 / 13

Decision chart of the extraction workflow
Extractdata from
DDAs
EFITdata
exists?
Reject
Calculatecoordinate
systems
ne,Tedata
exists?
PerformGP fits
Jump atρ > 0.8?
Gibbs Kernel
Regular Kernel
Ti exists?Perform GP
Ti = Te
nimpexists?
Perform GP
Use Zeff,est
Constr.q exists?
Use constrain
Apply bias
CalculateGK pa-
rameters
Applysanitychecks
Save
Y
N NY
Y
N
Y
N
Y
N
Y
N
8 / 13
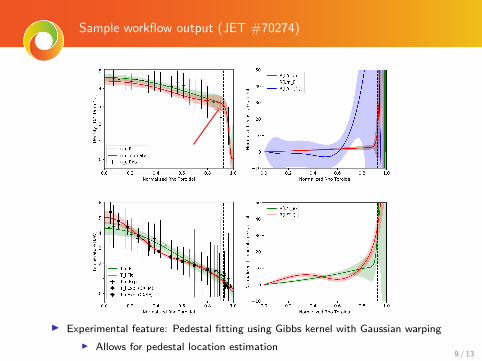
Sample workflow output (JET #70274)
I Experimental feature: Pedestal fitting using Gibbs kernel with Gaussian warpingI Allows for pedestal location estimation
9 / 13

Estimation of systematic coordinate mapping errors
Figure : JET #89091
Compared standard EFIT to EFITconstrained with Faraday rotation /MSE measurements
Figure : Normalized poloidal fluxdifferences with fitted 3rd-orderpolynomials for outer radii (red) andinner radii (blue)
10 / 13

Impact of estimated bias on profiles (JET #91366)
General result:
δρ ≈ 0.05 shift towards edge
For purposes of turbulence +transport integrated modelling,the primary concern is the shift ofthe boundary condition (pedestalshoulder location)
I Effect of this shift on suchmodelling has not yet beeninvestigated
11 / 13

Implemented checks to identify high quality data for validation
1. Integrated heat deposition profiles vs. injected heating powerI Validity check of heat deposition profiles
2. Heat deposition profiles vs. accumulated equipartition flux(Ti − Te)
I Validity check of fitted T profiles from GPI Equipartition flux does not yet account for isotope of main ion
(easily implementable)I For windows without CX, can be used to estimate how largeTi − Te can be
3. Integrated pressure (32nT ) profiles vs. total plasma energy
I Validity check of fitted n, T profiles from GP
Open to additional suggestions for checks, provided they arecomputationally quick to perform
12 / 13
Summary and next steps
Summary:I Gaussian process regression workflow for mass automated profile fitting (JET
data) for extracting parameter subspace for GK runsI Estimated bias between unconstrained and constrained EFIT (using Faraday
rotation and/or MSE) for boundary condition modification in integratedmodelling
I Basic sanity checks applied to identify high quality data set, used to testperformance of future NN within integrated modelling suites
Next Steps:I Improve checks to specify validation set for integrated modellingI Extend workflow to include data from other machines via adaptersI Detailed analysis of JET parameter space for problem characterization /
dimensionality reductionI Perform gyrokinetic simulations (QuaLiKiz, linear GENE) to build the training
set for NN
13 / 13

Using statistics on bias to estimate stochastic errors
In theory, x-errors can be applied by enhancing y-errors proportionally to gradient ofmodel fit without x-errors
K(x,x) + σ2nI =⇒ K(x,x) + σ2
nI + ∆yΣx∆Ty
I A. McHutchon and C. Rasmussen, “Gaussian process training with input noise,”Advances in Neural Information Processing Systems, pp. 1341–1349, 2011
I However, error bar size yields nonsensical fits −→ inappropriate error estimation14 / 13