Embed Size (px)
Citation preview
Maintaining a Linked Network Chain Utilizing Decentralized Mobility Control
AIAA GNC Conference & Exhibit
Aug. 21, 2006
Cory Dixon and Eric W. Frew
8/22/2006 2
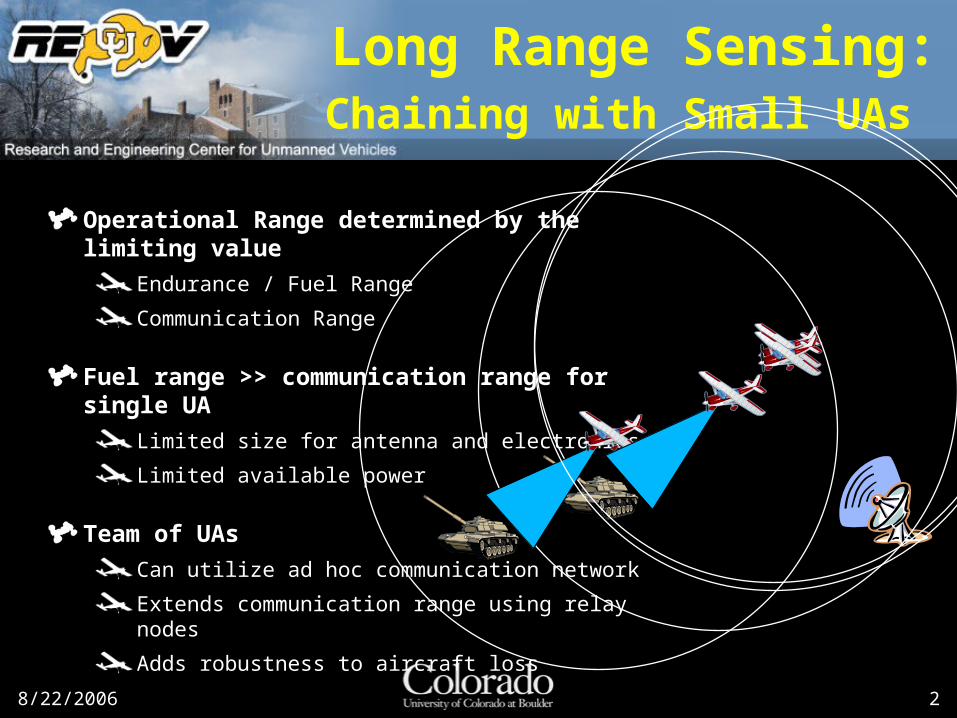
Long Range Sensing:Chaining with Small UAs
Operational Range determined by the limiting value
Endurance / Fuel Range
Communication Range
Fuel range >> communication range for single UA
Limited size for antenna and electronics
Limited available power
Team of UAs
Can utilize ad hoc communication network
Extends communication range using relay nodes
Adds robustness to aircraft loss
8/22/2006 3
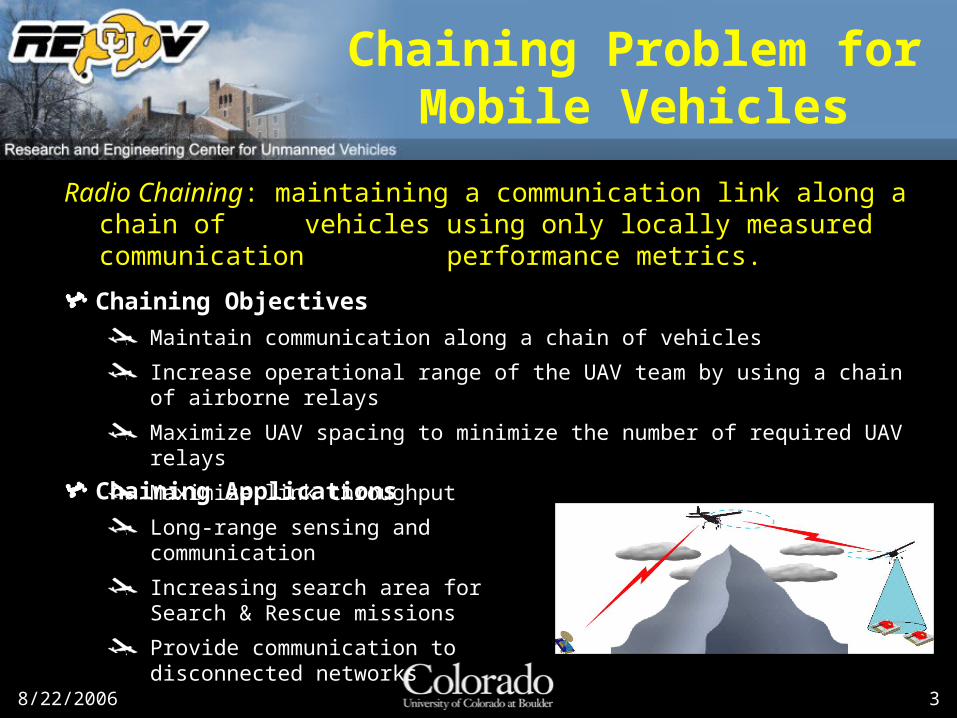
Chaining Problem for Mobile Vehicles
Radio Chaining: maintaining a communication link along a chain of vehicles using only locally measured
communication performance metrics.
Chaining Objectives
Maintain communication along a chain of vehicles
Increase operational range of the UAV team by using a chain of airborne relays
Maximize UAV spacing to minimize the number of required UAV relays
Maximize link throughput
Chaining Applications
Long-range sensing and communication
Increasing search area for Search & Rescue missions
Provide communication to disconnected networks

8/22/2006 4
AUGNet:Ad Hoc UAV Ground Network
SoekrisModel 4511
100 MHz
OrinocoPCMCIA 802.11b
Antenna
Adjustable 100 mWto 1 watt bidirectional amplifier
GPS receiver
. .92 @ FS1
82
81
858483 on
& off. .
92 @ FS182
81
858483 on
& off
FS2
85. .FS2
85. .
Disconnected Networks
FS2
85
FS2
85
UAV-UAV Chain
UAV Swarm
8/22/2006 5
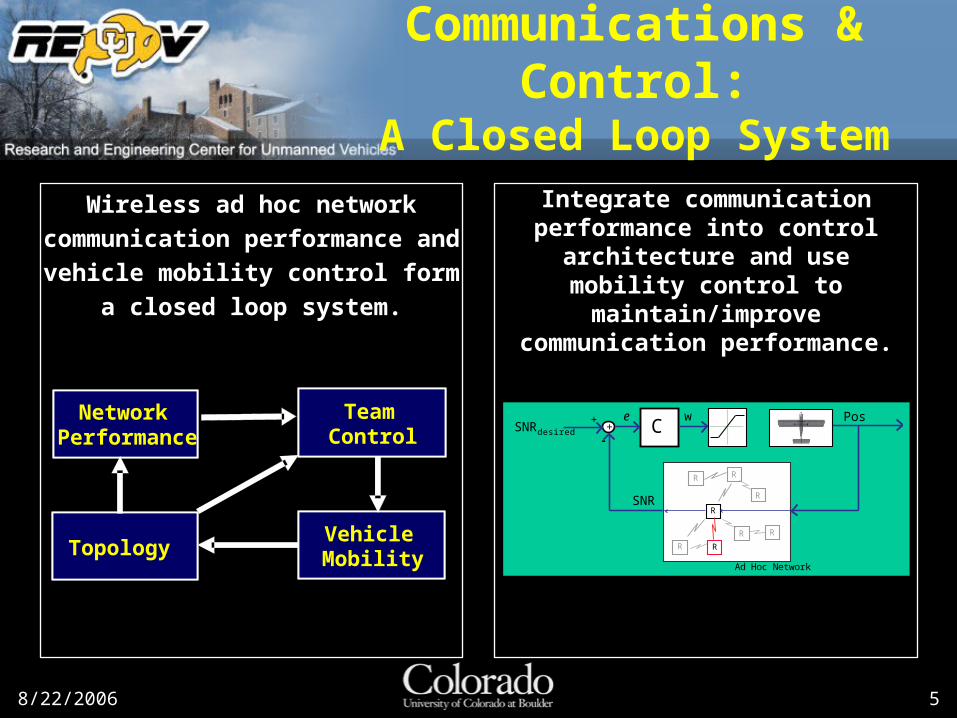
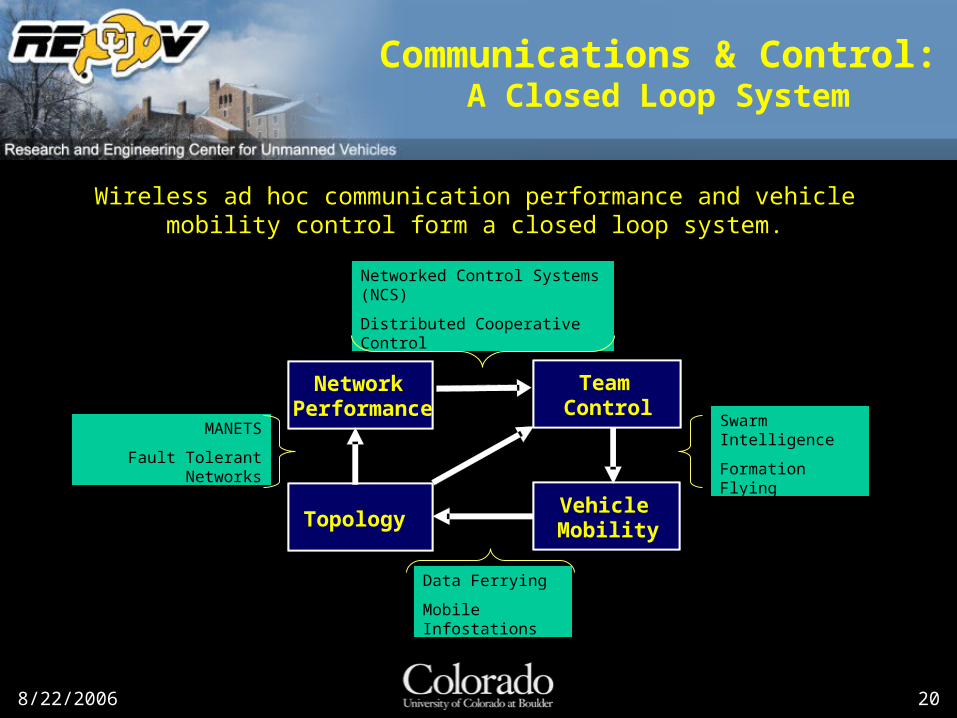
Communications & Control:A Closed Loop System
Wireless ad hoc network communication
performance and vehicle mobility
control form a closed loop system.
Integrate communication performance into control architecture and use
mobility control to maintain/improve communication performance.
C
SNR
edesiredSNR
w Pos
Ad Hoc Network
R
R R
R
+
-+
RR
R
R
Network Performance
Team Control
Network Topology
Vehicle Mobility
Network Performance
Team Control
TopologyVehicle Mobility

8/22/2006 6
References & Related Work
Communication as Control PrimitiveControlled mobility to Improve Network Performance
(Goldenberg et al., 2004)
(Dixon and Frew, 2005) – “Leashing of an Unmanned Aircraft to a Radio Source”
Connectivity & Limited Range Communications
(Beard and McLain, 2003)
(Spanos & Murray, 2004)
Vehicle Control in a Sampled EnvironmentCooperative Level Set Tracking (Boundary Tracking)
(Hsieh et al., 2004), (Marthaler & Bertozzi, 2003)
Cooperative Gradient Climbing
(Bachmayer et al., 2002), (Ogren et al., 2004)
Adaptive Sampling Utilizing Vehicle Motion
(Fiorelli et al., 2003)
Path (Route) Tracking for Nonholonomic VehiclesOptimal Control of Bounded-Curvature Vehicles
(Soures et al., 2000)
(Balluchi et al., 2005)
8/22/2006 7
-1000 -500 0 500 1000
-1000
-500
0
500
1000
X-Location [m]
Y-L
ocat
ion
[m]
SNR Field Lines
-1000 -500 0 500 1000
-1000
-500
0
500
1000
X-Location [m]
Y-L
ocat
ion
[m]
SNR Field Lines
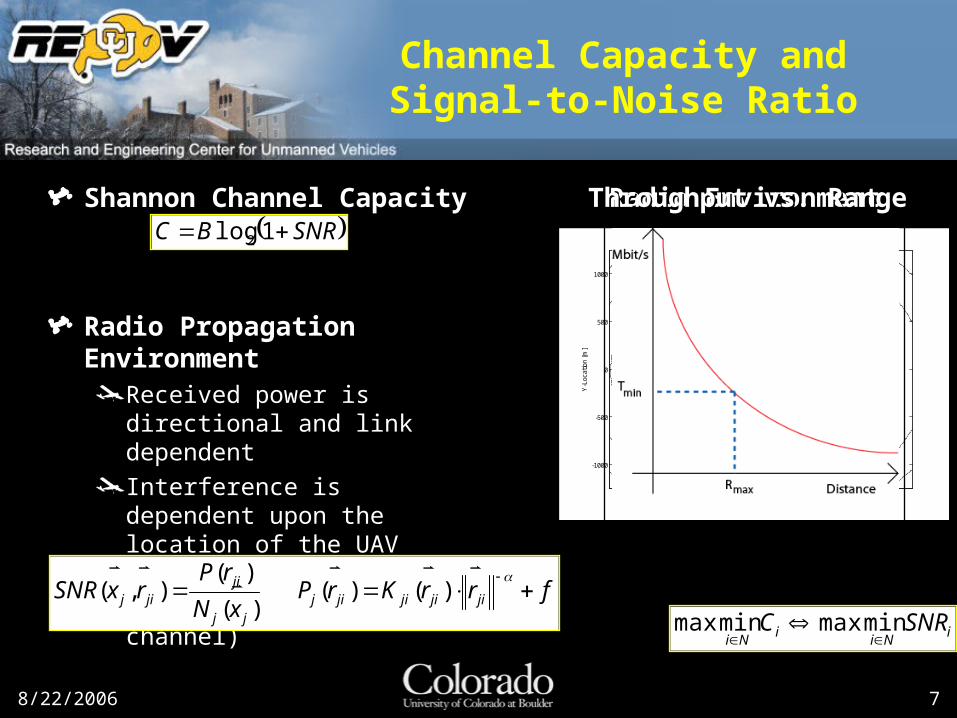
Channel Capacity and Signal-to-Noise Ratio
Shannon Channel Capacity
Radio Propagation EnvironmentReceived power is directional and link dependent
Interference is dependent upon the location of the UAV
Exponential power decay and fast fading (noisy channel)
frrKrPxN
rPrxSNR jijijijij
jj
jijij
)()(
)(
)(),(
SNRBC 1log2
Communication Range
Radio EnvironmentRadio EnvironmentThroughput vs. RangeThroughput vs. Range
iNi
iNi
SNRC
minmaxminmax
8/22/2006 8
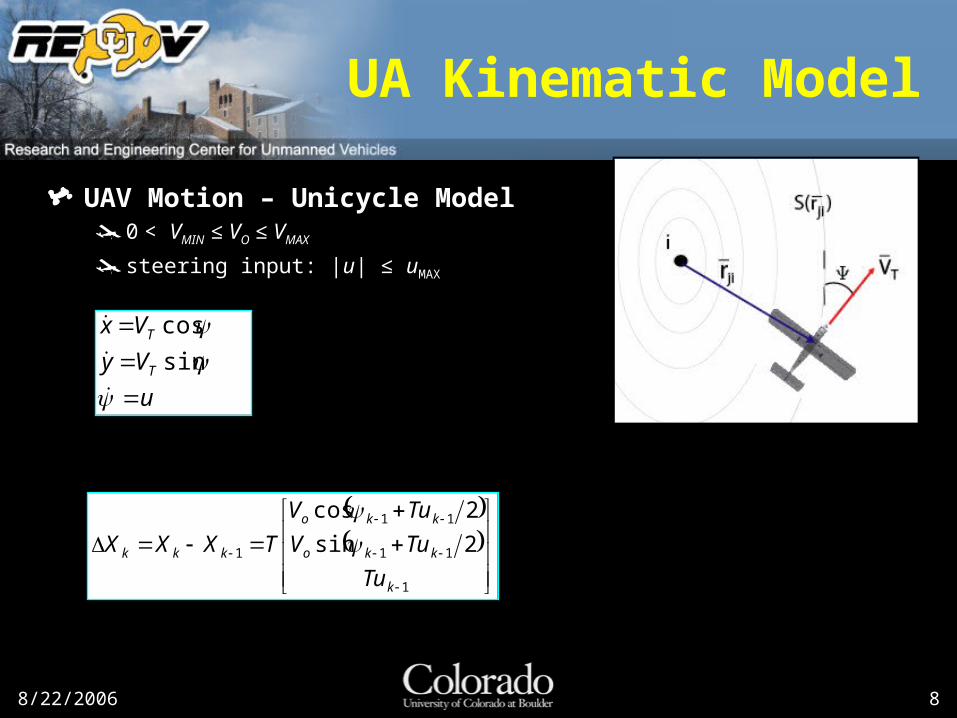
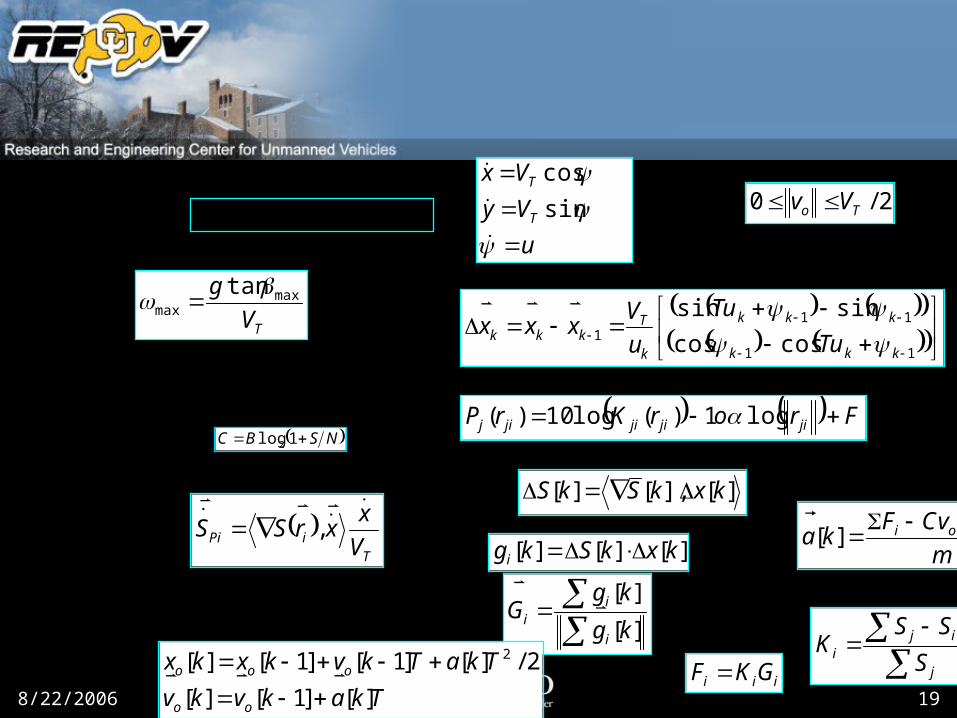
UA Kinematic Model
UAV Motion – Unicycle Model0 < VMIN ≤ VO ≤ VMAX
steering input: |u| ≤ uMAX
1
11
11
1 2sin
2cos
k
kko
kko
kkk
Tu
TuV
TuV
TXXX
u
Vy
Vx
T
T
sin
cos

8/22/2006 9
Motion of Vehicle Motion of Vehicle (Discrete Sampling Time)(Discrete Sampling Time)
SNR Gradient Field SNR Gradient Field (no localized noise)(no localized noise)
Change in Measured SNRChange in Measured SNR
Path GradientPath Gradient
SNR Path Gradient
rSN
KrS ii ˆ2/)1(
0
0
11
111 coscos
sinsin
kkk
kkk
k
Tkkk Tu
TuVxxx
*
=
cos, kkkkk xSxSS
C
SNR
edesiredSNR
w Pos
Ad Hoc Network
R
R R
R
+
-+
RR
R
R
T
=> kkk xSg
8/22/2006 10
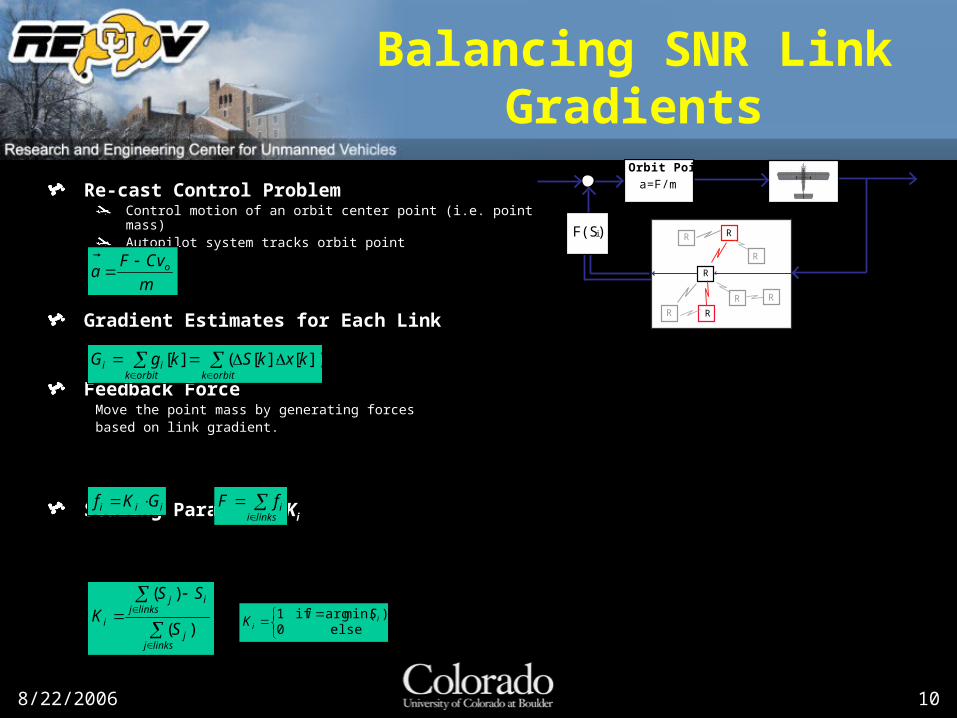
Balancing SNR Link Gradients
Re-cast Control ProblemControl motion of an orbit center point (i.e. point mass)Autopilot system tracks orbit point
Gradient Estimates for Each Link
Feedback ForceMove the point mass by generating forces based on link gradient.
Scaling Parameter Ki
a=F/mPos
Ad Hoc Network
R
R R
R
RR
R
R
F(Si)
Orbit Point
sensorF
])[][(][ kxkSkgGorbitkorbitk
ii
m
vCFa o
iii GKf
linksi
ifF
linksjj
ilinksj
j
i S
SSK
)(
)(
else0)min(arg if1 i
iSi
K
8/22/2006 11
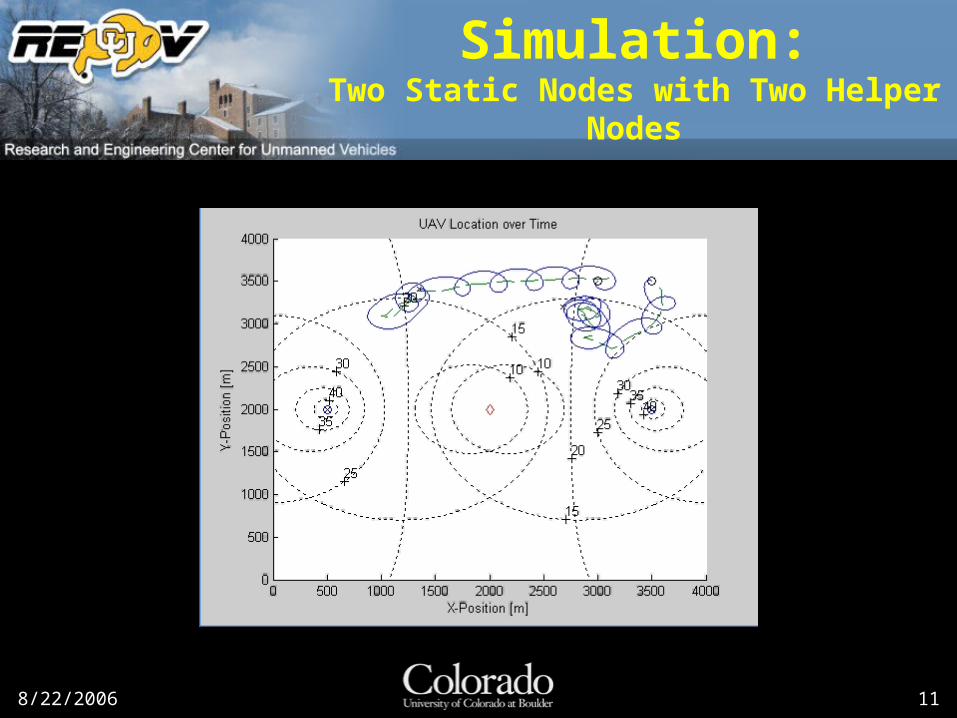
Simulation:Two Static Nodes with Two Helper Nodes

8/22/2006 12
Extension to Multiple Nodes
50 100 150 200 250 300 350 400
2
4
6
8
10
12
14
16
Time [s]
SN
R
Node 1Node 2Node 3Node 4
kdcPT
p
a = 2a > 2a => ∞
q
Energy Optimal Placement
8/22/2006 13
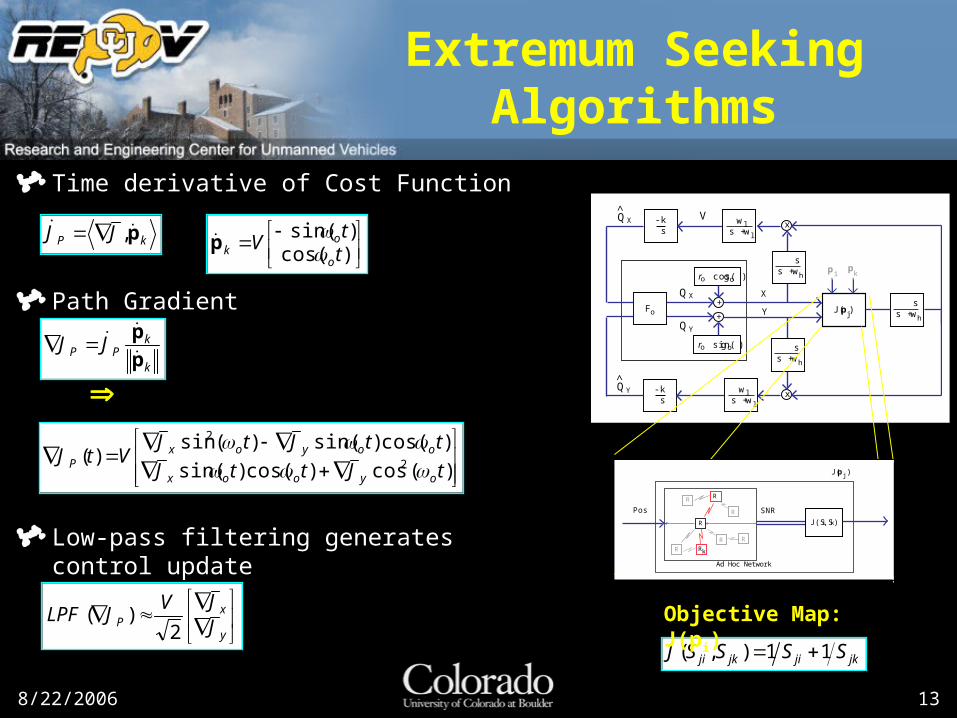
Extremum Seeking Algorithms
Time derivative of Cost Function
Path Gradient
Low-pass filtering generates control update
+
r cos(g )
J(p )
X
oo
+
r sin(g )oo
x-k s
Q^
x-k s
Q^
ss + wh
Fo
ss + wh
ss + wh
Y
X
Y
ws + wl
l
ws + wl
l
QX
QY
j
p kp
i
V
kP JJ p ,
k
kPP JJ
p
p
)cos()sin(
tt
Vo
ok
p
)(cos)cos()sin(
)cos()sin()(sin)( 2
2
tJttJ
ttJtJVtJ
oyoox
ooyoxP
y
xP J
JVJLPF
2)(
Ad Hoc Network
R
R RR
RR
R
R
J(Si,Sk)
Pos SNR
J(p )j
k
jkjijkji SSSSJ 11),(
Objective Map: J(pi)
8/22/2006 14
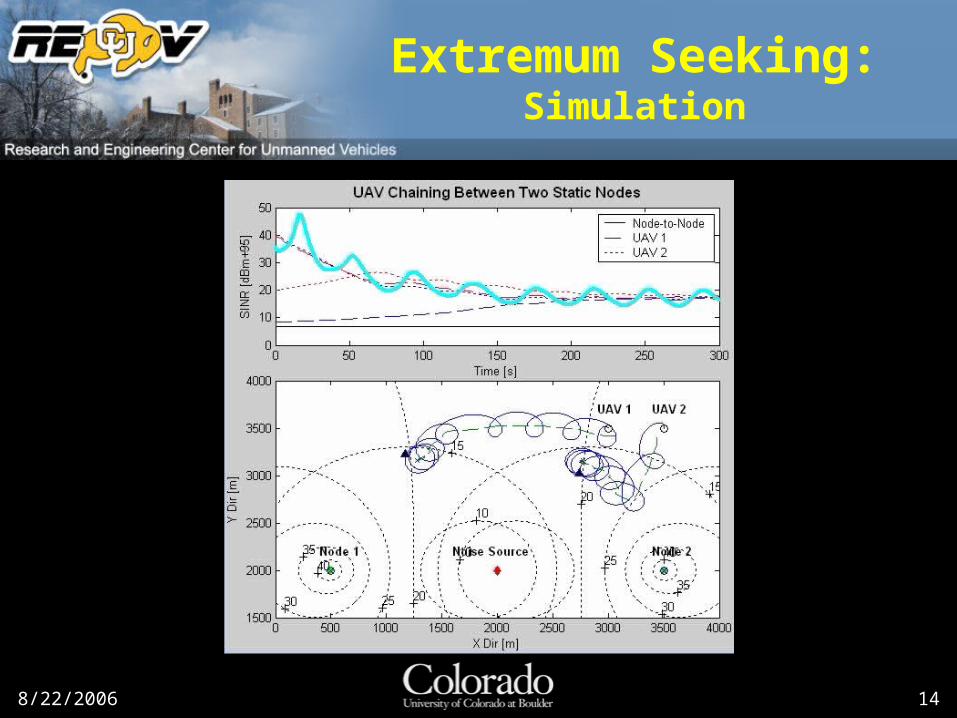
Extremum Seeking:Simulation

8/22/2006 15
Research Questions & Algorithm Improvements
Stability & SensitivitySimulations have shown the controller to be stable, but a formal proof is still required
Wireless communication channels are noisy (fast fading) and will require the SNR signal to be smoothed
Effects of node mobility
Estimation of SNR (performance) fieldEstimate the field to improve gradient estimation
Radio source localization, and noise source detection and localization
Initialization and Node Task AssignmentWhen to introduce a relay node?
In what position of the chain should it fill?
Additional Control Parameters to ConsiderGPS position to improve tracking of highly mobile nodes
Link importance and communication requirementsReal-time vs. delay tolerant data
Bandwidth requirement and node utility
4/27/05 16
Conclusion & Future Work
SNR as Control InputDoes not require any additional communication
Is extensible from one node to many nodes
Finds the energy optimal location regardless of environment
Provides a robust measure of link quality and bandwidth
Simulation ResultsShow that the SNR, sampled at 1 Hz with GPS, can be used to leash a single aircraft to two mobile nodes.
To obtain a leashed chain with multiple aircraft requires additional information to be shared, such as position, to aid in proper chain ordering
Future workExperimental testing utilizing AUGNet platform, i.e. Ares UAV and MNR radios.
Adapt ES algorithms and methods to provide research base
Next Talk – Phase Transitions for Controlled MobilityWhen should a relay node be introduced into the chain to maintain a communication throughput requirement?
The SNR controllers presented provide a robust control method that is capable of leashing disconnected nodes in the presence of localized
noise disturbances.

8/22/2006 17
http://RECUV.Colorado.edu
Questions and Comments are Welcomed!
Thanks for [email protected]
8/22/2006 18
8/22/2006 19
u
Vy
Vx
T
T
sin
cos
TV
g maxmax
tan
11
111 coscos
sinsin
kkk
kkk
k
Tkkk Tu
Tu
u
Vxxx
FrorKrP jijijijij log1)(log10)(
jjjijij xNrPrxSNR ,
T
iPi V
xxrSS
,
][],[][ kxkSkS
][][][ kxkSkgi
][
][
kg
kgG
i
ii
iii GKF
j
iji S
SSK
m
kvCFka oi ]1[
][
Tkakvkv
TkaTkvkxkx
oo
ooo
][]1[][
2/][]1[]1[][ 2
2/0 To Vv
NSBC 1log2
8/22/2006 20
Communications & Control:A Closed Loop System
Wireless ad hoc communication performance and vehicle mobility control form a closed loop system.
MANETS
Fault Tolerant Networks
Swarm Intelligence
Formation Flying
Data Ferrying
Mobile Infostations
Networked Control Systems (NCS)
Distributed Cooperative Control
Network Performance
Team Control
Network Topology
Vehicle Mobility
Network Performance
Team Control
TopologyVehicle Mobility
8/22/2006 21
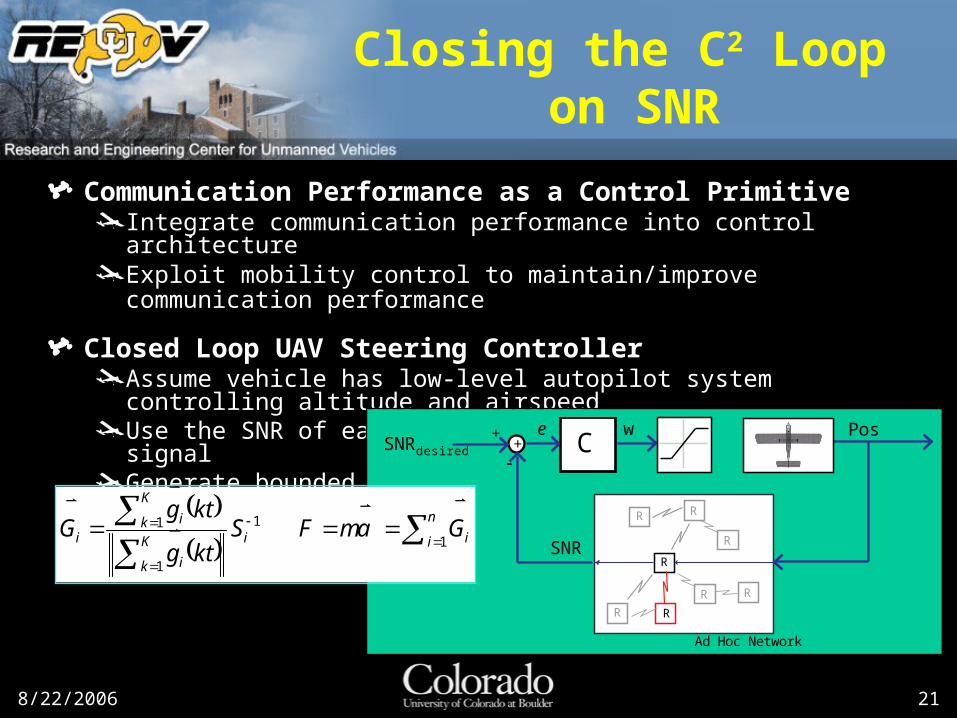
Closing the C2 Loop on SNR
Communication Performance as a Control PrimitiveIntegrate communication performance into control architectureExploit mobility control to maintain/improve communication performance
Closed Loop UAV Steering ControllerAssume vehicle has low-level autopilot system controlling altitude and airspeedUse the SNR of each neighbor link to form the feedback signal Generate bounded steering commands for use by an autopilot
C
SNR
edesiredSNR
w Pos
Ad Hoc Network
R
R R
R
+
-+
RR
R
R
n
i iiK
k i
K
k ii GamFS
ktg
ktgG
1
1
1
1
8/22/2006 22
i
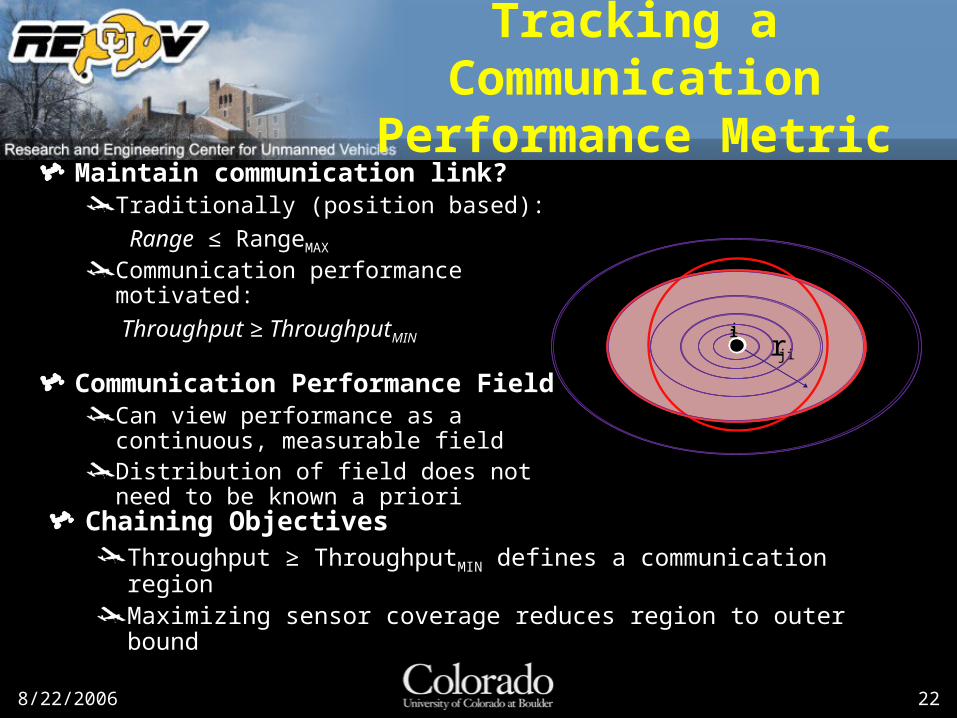
Tracking a Communication Performance Metric
Maintain communication link?Traditionally (position based):
Range ≤ RangeMAX
Communication performance motivated:
Throughput ≥ ThroughputMIN
Communication Performance FieldCan view performance as a continuous, measurable fieldDistribution of field does not need to be known a priori
Performance FieldPosition Based
Chaining ObjectivesThroughput ≥ ThroughputMIN defines a communication regionMaximizing sensor coverage reduces region to outer bound
ri
ji
ii