Embed Size (px)
Citation preview

5G Enabling Technologies for Cooperative, Connected and
Automated Mobility
Claudio Casetti – Politecnico di Torino - CNIT

page
20
Technologies, Services and Use Cases
• Technologies• Orchestrated 5G Edge platform
• GeoService
• AMQP Broker
• S-LDM
• Response Router
• V2X Component
• Services and Use cases• Manoeuvering Service
• Back Situation Awareness
• Use Cases

Technologies

page
40
Implementation of the Distributed Edge cloud
• MECs / edge clouds were implemented by the three MNOs each in their respective network data centers: • Munich (Deutsche Telekom AG)
• Vienna (Magenta Telekom)
• Turin (TIM)
• It enables low-latency communication and computing capabilities for the CAM use cases chosen by 5G-CARMEN

page
50
• Deployed and running in TIM, MTA and DTAG
• NFV-SO instances for each country running at WINGS
• UE to MEC service connectivity tested in TIM
Orchestrated 5G Edge platform

page
60
Edge Orchestration Platform (MEC)
Brennerpass Kufstein
C-ITS Backend
Italy Germany
Network Quality of Service
Maneuver
GeoServiceEdge Controller
(Platform Mgr,
VNFM, VIM
NFV-LO, MEAO
RSU,
Sensors
NFV-SO
Edge Orchestration Platform (MEC)
Edge Controller
(Platform Mgr,
VNFM, VIM
NFV-LO, MEAO
Edge Orchestration Platform (MEC)
Edge Controller
(Platform Mgr,
VNFM, VIM
NFV-LO, MEAO
RSU,
Sensors
NFV-SO NFV-SO
MEC Platform, NFVI
RNIS
RAN Data
Analytics
Network
Data Lake
Austria
AMQP Broker
eNB/gNB eNB/gNB eNB/gNB
SGW, PGW /
SMF, UPF
HSS, MME /
AUSF,AMF,UDM
AMQP Broker
Traffic Control
C-ITS Backend
AMQP Broker
Traffic Control
Precise Positioning
Reference
Data
Correction
Service
LBO
SGW, PGW /
SMF, UPF
SGW, PGW /
SMF, UPF
HSS, MME /
AUSF,AMF,UDM
eNB/gNB
RNIS RNIS
MEC Platform, NFVIMEC Platform, NFVIIDM,
IDCS
Explanation
ITS V2X
NFV/MEC/MANO
3GPP
Vehicle
5G Modem,
V2X Messaging
p.PosManeuver
Management
QoS
Vehicle
5G Modem,
V2X Messaging
p.PosManeuver
Management
QoS
Vehicle
5G Modem,
V2X Messaging
p.PosManeuver
Management
QoS
Vehicle
5G Modem,
V2X Messaging
p.PosManeuver
Management
QoS
S-LDM BSAF Maneuver
GeoService AMQP Broker
S-LDM BSAF Maneuver
GeoService AMQP Broker
S-LDM BSAF
3rd party
data
HSS, MME /
AUSF,AMF,UDM
IDM,
IDCS
IDM,
IDCS
IDM
page
70
GeoService
• The GeoService is an application deployed on the MEC which offers Connected Car basic messaging.
• It provides an overview of all the vehicles in a given area based on CAMs (Cooperative Awareness Messages)
• Its major task is to receive/forward/store messages from vehicles and road users.
• Main features:• CAM dissemination to “Area of Relevance”• DENM dissemination to Destination Area• Message Exposure/Ingestion interface• Own Service Area (OSA) support• Inter-GS communication

page
80
GeoService

page
90
Interworking of cross-border Geoservices• A message is
forwarded to all cars within Destination Area
• Different Own Service Areas may overlap, and so can different Destination Areas
• Each OSA takes care to disseminate in its own “portion” of DA

page
100
AMQP Broker
• It enables messages exchange between information producers (e.g. Road Operators, vehicles) and consumers (service providers, other vehicles).
• AMQP protocol (version 1.0) is a standard messaging protocol implemented by an over-the-top application platform running on VMs installed in the MEC• network independent, accessible from every data network (mobile 4G/5G or
fixed) using TCP/IP

page
110
AMQP Broker
Producers publish C-ITS messages adding geographic information in the AMQP “envelope”

page
120
AMQP Broker
Consumers subscribe to messages from AMQP broker specifying filter criteria based on envelope properties

page
130
AMQP Broker
AMQP broker pushes messages to consumers subscribed to events relevant to their geographic localization using Quadkey-based geocasting

page
140
AMQP Broker - Quadkey

page
150
Interworking of cross-border AMQP brokers
• Cross-border AMQP Brokers are “federated” by means of the Basic Interface• each broker acts as server when publishing messages to the other one, and as
client when subscribing to the other “federated” broker.
• In this way cars connected to one broker can receive messages from the other one too.
page
160
Server Local Dynamic Map (S-LDM) for extended perception
• Context: • 5G-enabled MEC services require the reception of data from vehicles
• They very often require only a subset of post-processed data, related to a specific “context” on the road (e.g., only data of vehicles and other non-connected objects involved in a centralized lane change maneuver), i.e., a “map” of a portion of the road
• This map should always be up-to-date and should be ready to provide data both to other MEC services and to vehicles, guaranteeing high reliability and low latency
• Proposed solution:• The Server Local Dynamic Map (S-LDM) service, as part of the 5G-enabled 5G-
CARMEN architecture
page
170
Server Local Dynamic Map (S-LDM) for extended perception
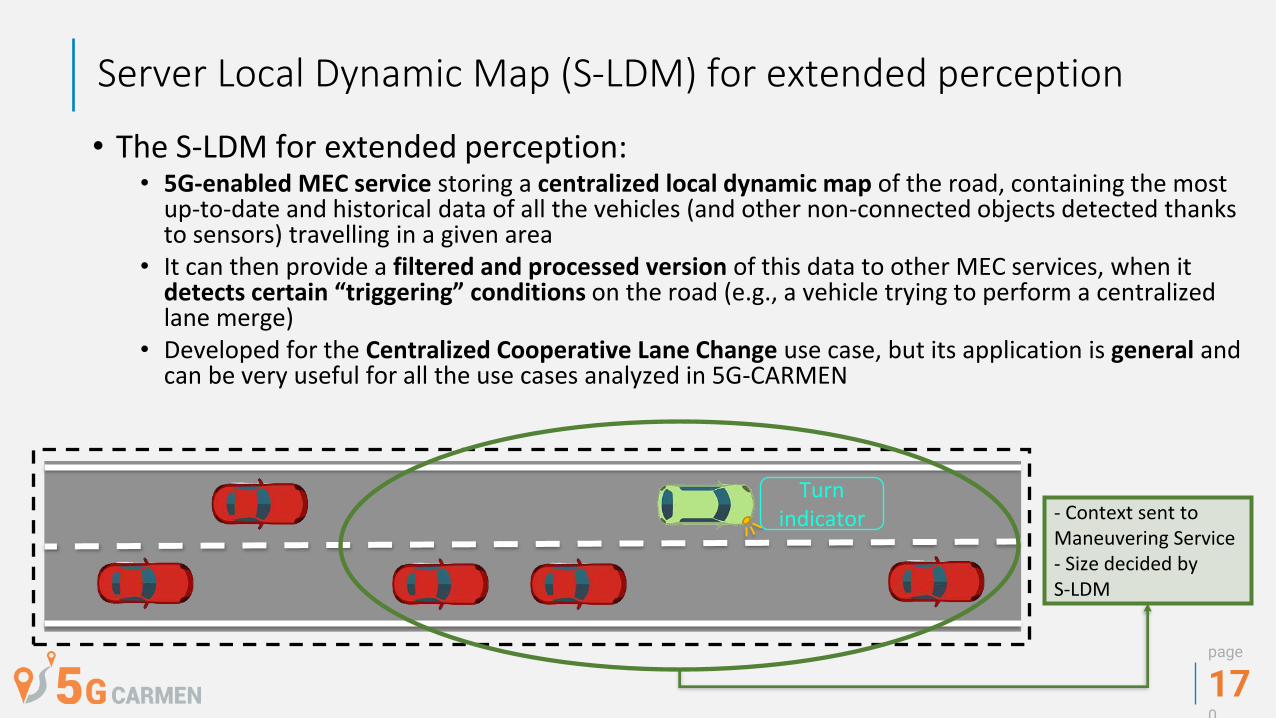
• The S-LDM for extended perception:• 5G-enabled MEC service storing a centralized local dynamic map of the road, containing the most
up-to-date and historical data of all the vehicles (and other non-connected objects detected thanks to sensors) travelling in a given area
• It can then provide a filtered and processed version of this data to other MEC services, when it detects certain “triggering” conditions on the road (e.g., a vehicle trying to perform a centralized lane merge)
• Developed for the Centralized Cooperative Lane Change use case, but its application is general and can be very useful for all the use cases analyzed in 5G-CARMEN
- Context sent to Maneuvering Service - Size decided by S-LDM
Turn indicator

page
180
Server Local Dynamic Map (S-LDM) for extended perception
• Up-to-date map of the road through reception of CAMs (at 20 Hz) and other ETSI-compliant messages (in the future, also data from motorway operator backends), via AMQP 1.0 and 5G Uu
• Receiving also data of non-connected objects thanks to on-board sensors and the transmission of virtual CAMs (CPM as soon as they are fully standardized)
1.0
UuCAMs @ 20 HzvCAMs @ 20 HzCPM
Sensors
S-LDM
NEC orchestrated edge platformMNO’s MEC
AMQPsub
BMW Maneuvering Service for Centralized Cooperative Lane Change
Other V2X MEC services
Real time visualization of the situation on the road

page
190
Server Local Dynamic Map (S-LDM) for extended perception
S-LDM measured performance and KPI requirements:• ~40 µs on average for processing
each received message• Much lower than the Service-level
Latency and 5G KPI <10 ms• Requires RX of CAMs at 20 Hz
and 5G uRLLC (latency lowerthan 10 ms)

page
200
Response Router
• Receives messages that are due to bedelivered to a specific car via Message Broker
• According to the destination car, it publishesthe message on the topic associated to thatcar
• Works as a message dispatcher: any messageis opaque to it (i.e., it does not check itscontent) but simply injects it toward itsdestination.

page
210
On Board V2X component
• It has the task to send, receive and process all the messages with PC5 and 5G Uu connectivity
• It consists of PHY layer units, as well as Facility and Application layer functions
5G modemV2N connectivity
V2X component
PC5 interface
AMQPClient
Filtering applications, incl. V-LDM
5G Radio Access
Position and Timing
V2N RA (external)
CAM, DENM, IVI, CPMVehicle Data Provider
BSAFClient
Precise Positioningunit
AD component
GeoserviceClient
Quality Control
Predictive QoS Client
CAN

Services and Use Cases

page
230
Manoeuvering Service
• Monitors the current state of theroad traffic and the intentions ofvehicles
• Determines the most suitablemoment to execute a lane change ifrequested
• Manage the gaps between vehicles,such that the maneuver can be donesafely and efficiently
• Generates recommendations forvehicles to follow if possible.

page
240
Manoeuvering Service
• It leverages an algorithm consisting of a Tactical- and Operational- Controller.
• The Tactical-Controller computes the most efficient merging sequence and time instant.
• The Operational-Controllergenerates the optimal control output for the car.

page
250
Back Situation Awareness Service
• Support for L3/L4 vehicles manoeuvering to clear the way for Emvergency Vehicles (EmV) on the highway
• High-level requirements:• Warn proceeding vehicles beyond the visual/audible range of the EmV
• Provide vehicles with an accurate, up-to-date Estimated Time of Arrival (ETA) of the EmV.
• Provide a continuous service, from long-range warning/alert of the EmV’sETA, to short-range awareness of the EmV’s ETA when the EmV is within direct communication range
page
260
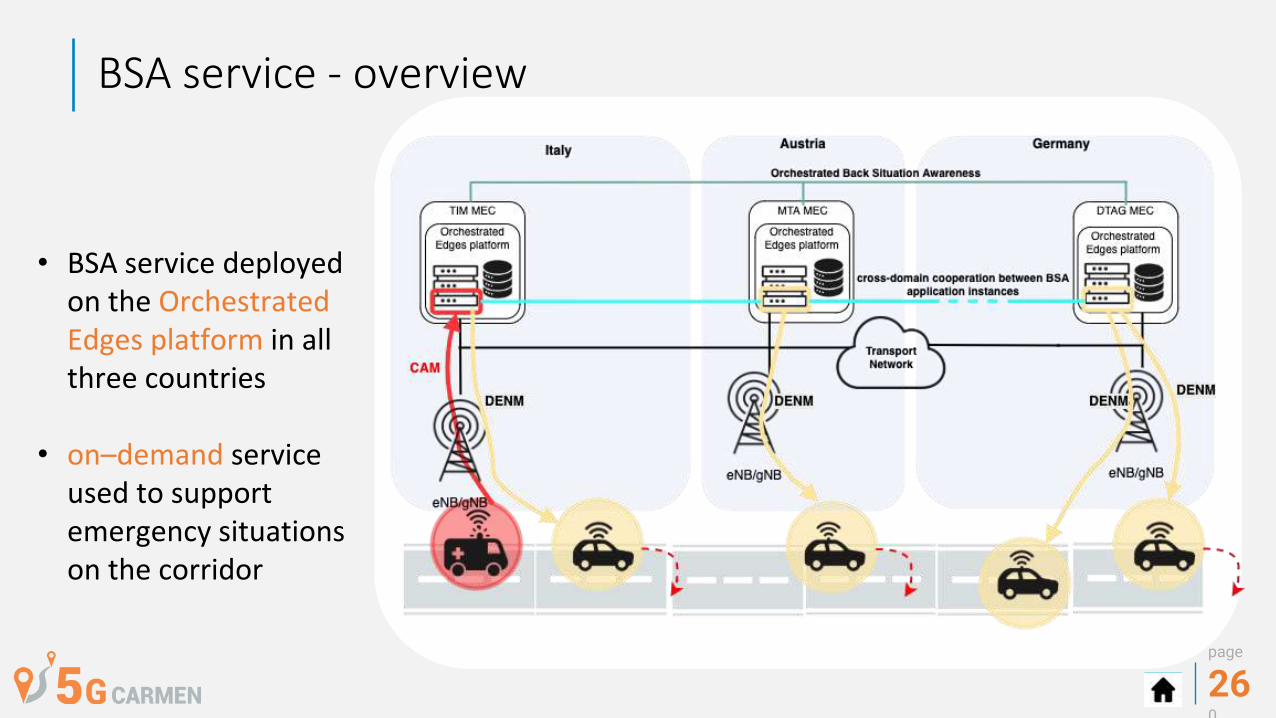
BSA service - overview
• BSA service deployed on the Orchestrated Edges platform in all three countries
• on–demand service used to support emergency situations on the corridor

page
270
BSA service - overview
• receives CAM traffic from an emergency vehicle (EmV) (1)
• disseminates DENM notifications with ETA values via GeoService (2) to other vehicles in areas affected by emergency situation (3)
• cross-border: proactively sends application metadata to peering instance

page
280
Use Case Matrix

page
290
Cooperative and Automated Lane Change
Highlights
• Maneuvering Service provides speed recommendations to involved vehicles
• Integration with: S-LDM, Response Router, AMQP broker, Precise Positioning

page
300
Use Case Matrix

page
310
Cooperative and Automated In-Lane Manoeuvers1
BA
2
A B
Plan
Exit/lane change plan would fall outside L4 ODD (queue)3
BA
Invalid plan; needs replanning
Sensors detectqueue
Decision: keep going straight4
Demo highlights
• Extended Lateral perception
• Lane change suggestion with right lane clear
• Lane change prevention with right lane busy

Thanks!