Embed Size (px)
Citation preview

ATPL
Performance

ATPL Performance 30 October 2003 ii
© Atlantic Flight Training All rights reserved. No part of this manual may be reproduced or transmitted in any forms by any means, electronic or mechanical, including photocopying, recording or by any information storage and retrieval system, without permission from Atlantic Flight Training in writing.

ATPL Performance ©Atlantic Flight Training iii
CHAPTER 1.
Definitions and Abbreviations Aerodrome Reference Code ..............................................................................................................1-1 Definitions ..........................................................................................................................................1-2 Abbreviations ...................................................................................................................................1-24
CHAPTER 2.
Basic Principles of Flight Forces on an Aeroplane.....................................................................................................................2-1 Variation of Coefficient of Lift with Angle of Attack.............................................................................2-2 Drag ...................................................................................................................................................2-4 Profile Drag ........................................................................................................................................2-4 Form Drag..........................................................................................................................................2-5 Skin Friction Drag ..............................................................................................................................2-5 Factors Affecting Skin Friction Drag...................................................................................................2-6 Interference Drag ...............................................................................................................................2-6 Induced Drag .....................................................................................................................................2-7 Factors Affecting Induced Drag..........................................................................................................2-8 Drag Formula ...................................................................................................................................2-10 Drag Curves.....................................................................................................................................2-11 Minimum Drag Velocity ....................................................................................................................2-12 Effect of Weight on the Drag Curves................................................................................................2-12 Lift/Drag Ratio ..................................................................................................................................2-13 Effect of Altitude...............................................................................................................................2-15 Weight..............................................................................................................................................2-15 Lift/Weight Couple............................................................................................................................2-16 Thrust...............................................................................................................................................2-16 Piston Engined Aeroplanes..............................................................................................................2-16 The Effects Of Altitude On Engine Performance..............................................................................2-16 Propeller Aeroplanes........................................................................................................................2-18 Jet Engine Aeroplanes .....................................................................................................................2-19
CHAPTER 3.
Aerodrome Characteristics Introduction ........................................................................................................................................3-1 Aerodrome Reference Code ..............................................................................................................3-1 Runway ..............................................................................................................................................3-2 Width..................................................................................................................................................3-2 Declared Distances............................................................................................................................3-2 Take-Off Run Available ......................................................................................................................3-3 Clearway ............................................................................................................................................3-4 Take-Off Distance Available (TODA) .................................................................................................3-6 Landing Distance Available (LDA) .....................................................................................................3-6 Stopway .............................................................................................................................................3-6 Runway Alignment .............................................................................................................................3-6 Meteorological Data ...........................................................................................................................3-7 Aircraft Classification Number — Pavement Classification Number (ACN/PCN) ...............................3-7 Reporting Pavement Bearing Strength...............................................................................................3-8 PCN Reporting...................................................................................................................................3-8 ACN Reporting.................................................................................................................................3-10 Overload Operations ........................................................................................................................3-10

ATPL Performance 30 October 2003 iv
Runway Strip Strength .....................................................................................................................3-11 Runway Contamination ....................................................................................................................3-11 JAR Definitions for Runway Contamination .....................................................................................3-11 Reporting of Contamination .............................................................................................................3-12 Water On A Runway ........................................................................................................................3-13 Determination of Friction Characteristics of Wet Paved Runways ...................................................3-13 Snow, Slush Or Ice On A Runway ...................................................................................................3-13 Water Equivalent Depth (WED) .......................................................................................................3-14 Hydroplaning....................................................................................................................................3-14 Dynamic Hydroplaning .....................................................................................................................3-15 Variables that Affect Hydroplaning...................................................................................................3-16 Viscous Hydroplaning ......................................................................................................................3-16 Combined Hydroplaning...................................................................................................................3-16 Reverted Rubber Hydroplaning........................................................................................................3-16
CHAPTER 4.
Basic Performance – Take-Off Aerodynamic Forces ..........................................................................................................................4-1 Variables That Affect the Take-Off.....................................................................................................4-3
CHAPTER 5.
Basic Performance – Climb Basic Aerodynamics...........................................................................................................................5-1 Forces in a Straight Steady Climb......................................................................................................5-1 Climb Speed ......................................................................................................................................5-3 Maximum Angle of Climb ...................................................................................................................5-3 Maximum Rate of Climb.....................................................................................................................5-3 Relation between Power and Drag ....................................................................................................5-4 VX and VY ...........................................................................................................................................5-5 Climb Performance ............................................................................................................................5-6 Ceiling ................................................................................................................................................5-7
CHAPTER 6.
Basic Performance – Cruise Forces in the Cruise ...........................................................................................................................6-1 Variation of Drag ................................................................................................................................6-1 Endurance/Range ..............................................................................................................................6-2 Piston Engined Aeroplanes................................................................................................................6-2 Jet Engined Aeroplanes .....................................................................................................................6-3 Range ................................................................................................................................................6-4 Best Range Speed.............................................................................................................................6-4 Factors Affecting Range.....................................................................................................................6-5 Endurance..........................................................................................................................................6-6 Factors Affecting Endurance..............................................................................................................6-6
CHAPTER 7.
Basic Performance – Descent Straight Steady Descent (Dive)..........................................................................................................7-1 Steady Glide ......................................................................................................................................7-2 Forces in a Steady Glide....................................................................................................................7-2 Glide Angle ........................................................................................................................................7-4

ATPL Performance ©Atlantic Flight Training v
The Effect of the Lift/Drag Ratio on Glide Performance .....................................................................7-4 The Effect of a Steady Wind on Glide Performance...........................................................................7-5 The Effect of Weight on Glide Performance.......................................................................................7-5 Summary............................................................................................................................................7-6
CHAPTER 8.
Basic Performance – Landing Approach............................................................................................................................................8-1 Approach Speeds ..............................................................................................................................8-1 Flap Settings ......................................................................................................................................8-1 Wind Effect.........................................................................................................................................8-2 Landing Distance ...............................................................................................................................8-3 Landing Speed...................................................................................................................................8-4 Weight................................................................................................................................................8-4 Density ...............................................................................................................................................8-4
CHAPTER 9.
JAR Requirements - General JAR-OPS 1.470 Applicability..............................................................................................................9-1 JAR-OPS 1.475 General....................................................................................................................9-1 JAR-OPS 1.475 General....................................................................................................................9-2 Take-Off Run Required (TORR) ........................................................................................................9-3 Take-Off Distance Required (TODR) .................................................................................................9-4 Accelerate Stop Distance (ASD) ........................................................................................................9-5 Aircraft Rotation .................................................................................................................................9-7 Balanced Field Operations.................................................................................................................9-7 Balanced Take-Off Field Length ........................................................................................................9-8 Contaminated and Wet Runways.......................................................................................................9-9 Regulations and Definitions ...............................................................................................................9-9 Wet Runways...................................................................................................................................9-10 Contaminated Runways ...................................................................................................................9-11 Optimum Take-Off ...........................................................................................................................9-11 Reduced Take-Off Thrust.................................................................................................................9-12 Assumed Temperature Method........................................................................................................9-12 Noise Abatement .............................................................................................................................9-12 Noise Abatement Departure Procedure 1 (NADP 1) ........................................................................9-13 Noise Abatement Departure Procedure 2 (NADP 2) ........................................................................9-14 Best Rate of Climb ...........................................................................................................................9-15 Weight Effect on Optimum and Service Ceiling ...............................................................................9-15 Buffet Onset Speed..........................................................................................................................9-16 Buffet Onset Boundary Chart ...........................................................................................................9-17 Maximum Altitude ............................................................................................................................9-20 Optimum Altitude – Jet Aircraft ........................................................................................................9-20 Rough Air (Turbulence) Speed ........................................................................................................9-20 Terrain Clearance for Performance A Aircraft ..................................................................................9-21 Service Ceiling .................................................................................................................................9-21 Drift Down Procedures .....................................................................................................................9-22 En-Route Regulations ......................................................................................................................9-24 Payload Versus Range ....................................................................................................................9-26
CHAPTER 10.
JAR Performance Class B Aeroplanes Performance Class B .......................................................................................................................10-1 JAR OPS 1 1.525 General ...............................................................................................................10-1

ATPL Performance 30 October 2003 vi
Take-Off and Landing Climb ............................................................................................................10-1 Take-off Climb..................................................................................................................................10-1 Landing Climb ..................................................................................................................................10-2 JAR OPS 1.530 Take-Off ............................................................................................................10-2 JAR OPS 1.535 Take-Off Obstacle Clearance – Multi Engined Aeroplanes....................................10-4 Take-Off Flight Path - Visual Course Guidance Navigation .............................................................10-4 Safe Operation With Performance Class B Aeroplanes In Conditions Of Limited Visibility ..............10-4 Take-Off Flight Path Construction....................................................................................................10-6 JAR-OPS 1.540 - En-Route - Multi-Engined Aeroplanes .................................................................10-6 JAR-OPS 1.542 - En-route - Single-Engine Aeroplanes ..................................................................10-7 JAR-OPS 1.545 - Landing - Destination And Alternate Aerodromes ...............................................10-7 JAR-OPS 1.550 - Landing - Dry Runway.........................................................................................10-7 Steep Approach Procedures ............................................................................................................10-8 Short Landing Operations ................................................................................................................10-8 Landing Distance Correction Factors...............................................................................................10-9 Runway Slope..................................................................................................................................10-9 Landing - Dry Runway......................................................................................................................10-9 JAR-OPS 1.555 - Landing - Wet and Contaminated Runways ......................................................10-10 Landing on Wet Grass Runways....................................................................................................10-10
CHAPTER 11.
JAR Performance Class A Aircraft Performance Class A .......................................................................................................................11-1 JAR-OPS 1.485 – General...............................................................................................................11-1 General - Wet and Contaminated Runway Data (JAR – 25 AMJ 25X1591).....................................11-1 Operation on Contaminated Runways .............................................................................................11-1 JAR-OPS 1.490 - Take-Off ..............................................................................................................11-2 JAR-OPS 1.495 - Take-Off Obstacle Clearance ..............................................................................11-2 JAR-OPS 1.500 - En-Route - One Engine Inoperative ....................................................................11-5 JAR-OPS 1.505 - En-route - Aeroplanes with Three or More Engines, Two Engines Inoperative ...11-6 JAR-OPS 1.510 - Landing - Destination and Alternate Aerodromes................................................11-6 JAR-OPS 1.515 - Landing - Dry Runways .......................................................................................11-7 Steep Approach Procedures ............................................................................................................11-8 JAR-OPS 1.520 - Landing - Wet and Contaminated Runways ........................................................11-8
CHAPTER 12.
JAR Performance Class A Aircraft JAR 25.101 General.........................................................................................................................12-1 JAR 25.105 Take-off ........................................................................................................................12-1 JAR 25.107 Take-off Speeds ...........................................................................................................12-2 JAR 25.109 Accelerate-Stop Distance.............................................................................................12-3 JAR 25.111 Take-Off Path ...............................................................................................................12-4 The Net Flight Path ..........................................................................................................................12-5 JAR 25.113 Take-off Distance And Take-off Run ............................................................................12-6 JAR 25.115 Take-off Flight Path ......................................................................................................12-7 JAR 25.119 Landing Climb: All-Engines-Operating .........................................................................12-7 JAR 25.121 Climb: One-Engine-Inoperative ....................................................................................12-8 Take-off; landing gear extended ......................................................................................................12-8 Take-off; landing gear retracted .......................................................................................................12-8 Final take-off ....................................................................................................................................12-9 Approach..........................................................................................................................................12-9 JAR 25.123 En-route Flight Paths....................................................................................................12-9

ATPL Performance ©Atlantic Flight Training vii
CHAPTER 13.
JAR Performance Class C Aircraft JAR-OPS 1.560 - General................................................................................................................13-1 JAR-OPS 1.565 - Take-Off ..............................................................................................................13-1 JAR-OPS 1.570 - Take-Off Obstacle Clearance ..............................................................................13-2 JAR-OPS 1.580 - En-Route - One Engine Inoperative ....................................................................13-3 JAR-OPS 1.585 - En-Route - Aeroplanes with Three or More Engines, Two Engines Inoperative..13-3 JAR-OPS 1.590 - Landing - Destination and Alternate Aerodromes................................................13-4 JAR-OPS 1.595 - Landing - Dry Runways .......................................................................................13-4 Landing Distance Correction Factors...............................................................................................13-5 JAR-OPS 1.600 - Landing - Wet and Contaminated Runways ........................................................13-5

ATPL Performance 30 October 2003 viii
Intentionally Left Blank

ATPL Performance ©Atlantic Flight Training 1-1
Chapter 1.
Definitions and Abbreviations Introduction This book is intended to help you study for the JAR-FCL ATPL Performance examination. In this chapter you will find the definitions and abbreviations you require for the course. A public transport aircraft should proceed safely from departure to destination. The engine and airframe design should ensure that:
It has sufficient power and manoeuvrability for all stages of flight, and It should be filled with sufficient fuel, including adequate reserves.
Fuel considerations are dealt with in Flight Planning. Our concern is with:
Power Manoeuvrability, and Performance planning
We shall not concern ourselves with the fuel and time required for the various stages of flight, but solely with the space each stage requires. The object of the performance plan is to ensure that, in every situation, the space required does not exceed the space available; further, that progress is safe whether no incident occurs or whether an incident such as an engine failure occurs at any critical stage of the flight. Aerodrome Reference Code All airfields have an aerodrome reference code number and letter which is determined in accordance with the characteristics of the aeroplane for which an aerodrome facility is intended.
Code Number The code number is selected corresponding to the highest value for the aeroplane reference field length of the aeroplanes for which the runway is intended. The aeroplane reference field length is for the selection of the code number and is not intended to influence the actual runway length provided. Code Letter The code letter is determined by selecting the code letter that corresponds to the greatest wing span or the greatest outer main gear wheel span whichever gives the more demanding code letter of the aeroplane for which the facility is intended.

ATPL Performance 30 October 2003 1-2
Code Element 1 Code Element 2 Code Number Aeroplane
Reference Field Length
Code Letter Wing Span Outer Main Gear Wheel Span*
1 Less than 800 m A Up to but not including 15 m
Up to but not including 4.5 m
2 800 m up to but not including 1200 m
B 15 m up to but not including 24 m
4.5 m up to but not including 6 m
3 1200 m up to but not including 1800 m
C 24 m up to but not including 36 m
6 m up to but not including 9 m
4 1800 m and over
D 36 m up to but not including 52 m
9 m up to but not including 14 m
E 52 m up to but not including 65 m
9 m up to but not including 14 m
* Distance between the outside edges of the main gear wheels Definitions
Accelerate/Stop Distance (ASD) The distance an aeroplane takes to accelerate to V1 and brake safely to a halt in the prevailing conditions.
Accelerate/Stop Distance Available (ASDA) See declared distances Accelerate/Stop Distance Required (ASDR) The calculated distance required for an aircraft to accelerate to V1 and brake to a halt. This figure is calculated from the aeroplane flight manual and always allows for a factored safety margin.
Aerodrome Elevation The elevation of the highest usable point of the landing area
Aerodrome Operating Minima The limits of usability of an aerodrome for:
Take-off, expressed in terms of RVR and/or visibility and, if necessary, cloud conditions Landing in precision approach and landing operations, expressed in terms of visibility and/or RVR and DA/DH as appropriate to the category of the operation, and Landing in non-precision approach and landing operations, expressed in terms of visibility and/or RVR, MDA/MDH and, if necessary, cloud conditions
Aerodrome Reference Field Length The minimum field length required for take-off at maximum certificated take-off mass, sea level, standard atmospheric conditions, still air and zero runway slope, as shown in the appropriate aeroplane

ATPL Performance ©Atlantic Flight Training 1-3
flight manual prescribed by the certificating authority or equivalent data from the aeroplane manufacturer. Field length means balanced field length for aeroplanes, if applicable, or take-off distance in other cases
Aerodrome Reference Point The designated geographical location of the aerodrome
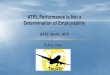
Aerodynamic Definitions
Thrust Drag
Weight
Lift
Drag The force that opposes thrust
Induced Drag The amount of drag caused by the movement of an aerofoil Profile Drag The amount of drag caused by:
The aerofoil shape The boundary layer surface friction Streamlining of the aircraft
Lift The force acting on an aerofoil which is at right angles to the airflow (acting upwards). Thrust The force produced by the aeroplane power units acting in a forwards direction
Aeroplane A power-driven heavier than air aircraft, deriving its lift in flight chiefly from aerodynamic reactions on surfaces which remain fixed under given conditions of flight.

ATPL Performance 30 October 2003 1-4
Aircraft – Category Classification of aircraft according to specified basic characteristics eg aeroplane, helicopter, glider, free balloon
Aircraft Certified For Single-Pilot Operation A type of aircraft which the State of Registry has determined, during the certification process, can be operated safely with a minimum crew of one pilot
Airspeed
Indicated Airspeed (IAS) The airspeed of an aircraft as shown on its pitot-static airspeed indicator (ASI), that provides vital airspeed information, e.g. stalling and structural limitation airspeeds, to the flight-crew. It is calibrated to reflect standard atmospheric adiabatic compressible flow at sea level, and is uncorrected for airspeed system errors. Calibrated Airspeed (CAS) The Indicated airspeed of an aircraft corrected for position and instrument errors. CAS is equal to the True Airspeed (TAS) in standard atmosphere at sea level only. Equivalent Airspeed (EAS) The calibrated airspeed of an aircraft corrected for compressibility error at a particular altitude. EAS is equal to IAS at airspeeds less than 300 knots, and is equal to TAS in standard atmosphere at sea level only. True Airspeed (TAS) The actual speed of an aircraft through the air relative to the air that is uninfluenced by the aircraft. TAS is important for navigation purposes only. The relationship between EAS and TAS is as follows: TAS = EAS (ρo / ρ )½
where ρo = density at sea level
ρ = density at altitude Mach Number The ratio of the TAS of an aircraft to the speed of sound in the surrounding atmosphere, i.e. the local speed of sound (LSS). Mach No = TAS / LSS
All Up Weight (AUW) The total weight of an aeroplane including:
Fuel Crew Payload
Alternate Aerodrome An aerodrome to which an aircraft may proceed when it becomes either impossible or inadvisable to proceed to or land at the aerodrome of intended landing. Alternate aerodromes include the following:

ATPL Performance ©Atlantic Flight Training 1-5
Take-off Alternate An alternate aerodrome at which an aircraft can land should this become necessary shortly after take-off and it is not possible to use the aerodrome of departure. En-route Alternate An aerodrome at which an aircraft would be able to land after experiencing an abnormal or emergency condition while en-route.
Destination Alternate An aerodrome to which an aircraft may proceed should it become impossible or inadvisable to land at the aerodrome of intended landing.
Note: The aerodrome from which a flight departs may also be an en-route or a destination alternate aerodrome for that flight.
Altitude The vertical distance of a level, a point or an object considered as a point measured from mean sea level (MSL). Approach/Climb Speed The recommended speed for the initial climb after a missed approach is initiated at or above DH. For the situation where the critical power unit is inoperative at MLM and the configuration achieved 15 seconds after initiation (undercarriage up) the aeroplane will be able to maintain the climb gradient required:
Class A Twin Engined Aeroplane 2.1% Three Engined Aeroplane 2.4% Four Engined Aeroplane 2.7%
The speed must not exceed 1.5VS. Aquaplaning Speed Hydroplaning speed. The speed where a loss of directional control on the ground is caused by a decrease in surface friction due to contaminant on the surface of the runway. Balanced Field Length Where ASDA equals TODA then it is accepted that the aerodrome has a balanced field length. Basic Weight The weight of an aircraft and:
All basic equipment Plus the declared quantity of unusable fuel and oil
Brake Release Point (BRP) The point at which the take-off roll starts

ATPL Performance 30 October 2003 1-6
Buffet Speed The speed where the aerodynamic airflow over the airframe becomes turbulent and causes vibration in the airframe Calibrated Airspeed or Rectified Airspeed (RAS) Rectified Air Speed, sometimes known as Calibrated Air Speed (CAS) is IAS corrected for Position and Instrument Error. RAS will equal TAS (True Air Speed) in calibration conditions, sea level temperature +15°C,with pressure 1013.25mb. Ceiling Split into two definitions:
Absolute Ceiling The pressure altitude where the rate of climb is zero Service Ceiling The pressure altitude where the rate of climb is a defined value:
Jet Engined Aeroplanes 500 fpm (2.5 m/s) Propeller Driven Aeroplanes 100 fpm (0.5 m/s)
Net Ceiling A artificial figure devised for aircraft safety reasons:
Jet Aircraft 750 fpm Propeller/Piston Aircraft 150 fpm
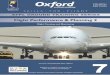
The propulsion system and altitude of an aircraft affects an aircraft’s maximum speeds Clearway A defined rectangular area on the ground or water under the control of the appropriate authority, selected or prepared as a suitable area over which an aeroplane may make a portion of its initial climb to a specified height. The clearway is beyond TORA in the direction of the extended centre line. The first non-frangible obstacle that can endanger an aeroplane in flight restricts the length of the clearway. The clearway cannot exceed 50% of the TORA.
UK The Clearway has a starting semi-width of half the runway strip at the end of TORA. This expands to 90 m for Code 3 and 4 aerodromes forming a triangular shaped area

ATPL Performance ©Atlantic Flight Training 1-7
ICAO The semi-width is rectangular
Climb Gradient Change in height % Horizontal distance travelled Critical Power Unit(s) The power unit(s) failure of which gives the most adverse effect on the aircraft characteristics relative to the case under consideration D Value This value is the equivalent dry, level, hard surface, still air values of the field lengths when compared accounting for:
Surface condition
TORA
90m 90 m
Clearway
75m 75 m
Clearway
TORA

ATPL Performance 30 October 2003 1-8
ACS packs Runway slope Wind component Airworthiness factors
Decision Altitude (DA) or Decision Height (DH) A specified altitude or height in the precision approach at which a missed approach must be initiated if the required visual reference to continue the approach has not been established
Note: DA is referenced to mean sea level, DH is referenced to threshold elevation
Note: The required visual reference means that section of the visual aids or of the approach area which should have been in view for sufficient time for the pilot to have made an assessment of the aircraft position and rate of change of position, in relation to the desired flight path. In Category III operations with a DH the required visual reference is that specified for the particular procedure and operation
Decision Speed (V1) The pilot’s decision to continue or abandon take-off after an engine future will be based on AUW and field lengths. The most direct way of identifying the transition from the “must stop” to the “must continue” situation is a reading on the ASI. V1 is that speed. Account must be taken for the time delay between the failure and the pilot’s recognition of it and response to it. Should an engine failure occur at such a time that the pilot can respond below V1 the take-off must be abandoned. Should the failure occur at such a time that when it is recognised, the speed is above V1, the take-off must be continued. A Group A aeroplane is capable of continuing the take-off safely above V1 on the remaining engines even if they give only net (1 engine inoperative) performance. To summarise:
Engine failure recognised below V1 STOP Engine failure recognised above V1 CONTINTUE. Only at exactly V1 is there choice.
V1 is never less than VEF plus the speed increase after an engine failure to the point where a pilot applies the first means of retardation. The airspeed at the decision point will never be less than VMCG or greater than VR
Declared Distances
Take-Off Run Available (TORA) The length of runway declared available and suitable for the ground run of an aeroplane. The runway having the following uniform characteristics in:
Braking coefficient Slope Load bearing strength

ATPL Performance ©Atlantic Flight Training 1-9
The runway must also be free of non-frangible obstacles. Take-Off Distance Available (TODA) The declared distance available for an aeroplane to take-off and attain screen height. TODA can comprise of TORA plus clearway. TODA is limited to 1.5 x TORA or to the first non-frangible obstacle liable to damage the aeroplane during a take-off, whichever is the shorter.
Accelerate-Stop Distance Available (ASDA) The length of the take-off run available plus the length of the stopway, if provided. This is the total distance for the aeroplane to accelerate to V1, abandon take-off and to brake safely. Can be referred to as Emergency Distance Available (EMDA) Landing Distance Available (LDA) The length of the runway which is declared available and suitable for the ground run of an aeroplane landing. The area has to:
Be free of all non-frangible obstacles Have uniform characteristics for the:
Slope Bearing strength Braking coefficient
The LDA starts at the runway threshold and continues for the length of the runway. Where there is a displaced threshold then the LDA may be less than the physical length of the runway.
Density Altitude The height in ISA which has a density corresponding to the actual density at a specified location. This can also be taken as the pressure altitude corrected for temperature.
Design Minimum Weight The lowest weight that an aeroplane complies with the structural safety requirements necessary for safety
Design Maximum Weight The highest of the weights below at which an aeroplane complies with the structural requirements.
Design Take-Off Weight For taxiing or landing Design En-Route Weight For conditions other than take-off or landing Design Landing Weight For landing at the maximum velocity of descent

ATPL Performance 30 October 2003 1-10
Elevation The vertical distance of a point on or affixed to the surface of the earth, measured from mean sea level Empty Weight Specified in the flight manual the empty weight includes:
Fixed ballast Unusable fuel Undrainable oil Engine coolant Hydraulic fluid Potable water Lavatory chemicals
It excludes:
Fuel Crew Payload
Other terms used are Dry Operating Weight or Aircraft Prepared for Service Weight (APS) Equivalent Air Speed (EAS) Most ASIs are calibrated for an ideal incompressible air flow (½ρv2). As compression affects all speeds EAS is RAS corrected for compressibility Extended Range Twin Operations (ETOPS)
Adequate Aerodrome An adequate aerodrome is an aerodrome which the operator of the aircraft considers to be adequate. In particular it should be expected that at the anticipated time of use:
The aerodrome will be available, and equipped with necessary ancillary services. such as ATC, sufficient lighting, communications, weather reporting, navigation aids, and safety cover, and
At least one letdown aid (ground radar would so qualify) will be
available for an instrument approach. Aerodrome In general terms, an operator may make an appraisal that an aerodrome has long enough runways, and is sufficiently equipped, to be considered adequate for his planned ETOPS routes. The commander must satisfy himself on the day, using criteria provided by the operator, that he has sufficient adequate aerodromes which, taking into account the weather and any equipment unserviceabilities, are suitable for his intended operation.

ATPL Performance ©Atlantic Flight Training 1-11
Extended Range Operations (ETOPS) Extended range operations are those operations intended to be, or actually, conducted over a route that contains a point further than one hour's flying time (in still air) at the normal one-engine-inoperative cruise speed from an adequate aerodrome. When, alternatively, a Threshold Distance has been agreed with the Authority, all non-ETOPS flights shall remain within the Threshold Distance of an adequate aerodrome. ETOPS Segment The portion of an ETOPS flight that begins when the aeroplane is first more than Threshold Distance from any adequate aerodrome and ends when the aeroplane is last more than Threshold Distance from any adequate aerodrome. Rule Distance The distance travelled in still air in the Rule Time, at the normal one-engine Inoperative cruise speed. Rule Time The maximum diversion time that any point on the route may be from a suitable aerodrome for landing, as specified by the Authority and included in the Operations Manual. Suitable Aerodrome A suitable aerodrome is an adequate aerodrome where at the anticipated time of use weather reports or forecasts, or any combination thereof indicate that the weather conditions are very likely to be at or above the normal operating minima at the time of the intended operation. A particular aerodrome may be considered to be a suitable aerodrome for flight planning and dispatch purposes for extended range operations if it meets the criteria below:
Single ILS/MLS, or PAR
Cloudbase of 600 feet and a visibility of 3 km (2 statute miles), or A cloudbase of 400 feet and a visibility of 1.5 km (1 statute mile)
above the lowest authorised landing minima; whichever is higher.
Non-precision and circling approaches (including SRA)
Cloudbase of 800 feet and a visibility of 3 km (2 statute miles) or A cloudbase of 400 feet and a visibility of 1.5 km (1 statute mile)
above the lowest authorised landing minima: whichever is higher.
Two or more ILS/MLS/PAR to separate runways
Where forecast wind and surface conditions indicate that two or more separate runways will be available within the Rule Distance, whether at one or more airfields, the relevant Planning Minima cloudbase may be reduced by 200 feet and the visibility by 1 km (1/2 statute mile).
Threshold Distance The distance travelled in still air in 60 minutes by an aircraft at the normal one-engine-inoperative cruise speed. Threshold Time 60 minutes.

ATPL Performance 30 October 2003 1-12
Final Take-Off Speed The speed of the aeroplane at the end of the take-off path with the aircraft in en-route configuration with one engine inoperative and all other engines at maximum continuous power Flap Extended Speed The maximum speed with the wing flaps in a set extended position
Flight Level A surface of constant atmospheric pressure which is related to a specific pressure datum, 1013.2 hPa and is separated from other surfaces by specific pressure intervals.
Note: A pressure type altimeter calibrated in accordance with the Standard Atmosphere:
When set to a QNH altimeter setting, will indicate altitude When set to a QFE altimeter setting, will indicate height, above the
QFE reference datum When set to a pressure of 1013.2 hPa may be used to indicate flight
levels.
Note: The terms “height” and “altitude” used in the above note, indicate altimetric rather than geometric heights and altitudes.
Frangibility The ability of an object to retain its structural integrity and stiffness to a specific maximum load but when subject to a load greater than specified or struck by an aircraft will break, distort or yield in such a manner as to present minimum hazard to an aeroplane Gross Height This is the average height reached by an average aeroplane flown by an average pilot. The height is reduced for safety reasons to obtain net height. The reduction is specified by the JAA and is dependent on the phase of flight Gross Flight Path (GFP) The path of an aeroplane after reaching the end of the TODR. GFP is calculated using Gross Performance Data (see below) and ends at the same horizontal distance from the take-off point as the Net Flight Path Gross Performance The average performance that a fleet of aeroplanes should achieve so that any aeroplane has a 50% chance of exceeding that level of performance at any time Gross Weight The total weight of an aeroplane at the commencement of the take-off run Ground Effect The effect of downwash is reduced when an aeroplane’s height is within one wingspan of the ground. The angle of attack (AOA) reduces which in turn increases the lift produced. This is “ground effect”

ATPL Performance ©Atlantic Flight Training 1-13
Height The vertical distance of a level, a point or an object considered as a point, measured from a specified datum (NOT msl). Hydroplaning Speed See Aquaplaning Speed Indicated Airspeed Indicated air speed is the ASIR corrected for instrument error due to imperfections in manufacture. The aircraft is flown on IAS International Standard Atmosphere, Pressure Settings and Related Matters Based on the International Standard Atmosphere for dry air (ICAO 1964):
At mean sea level pressure 1013.25 Temperature 15°C From msl to 11 km decrease in temperature 6.5°C/km From 11 km to 20 km isothermal temperature -56.5°C From 20 km to 32 km a rise in temperature of about
1°C/km
Landing Approach Speed The CAS in the landing configuration that is maintained to a screen height of 50ft during a stabilised approach. The speed is not less than 1.3VS for any practicable landing weight Landing-Climb Speed The recommended speed for the initial climb out after a baulked landing. The speed assumes that the aeroplane achieves a minimum gross gradient of climb of 3.2% where:
All power units operative The aeroplane is in the landing configuration Power is obtained 8 seconds after initiation

ATPL Performance 30 October 2003 1-14
The speed is:
Never less than VMCL, and Must not exceed the greater of VMCL or 1.3VS
The speed is calculated from AUW and flap setting for landing. The speed is:
Four Engined Aeroplanes 1.15VS All other Class A Aeroplanes 1.2VS
Landing Gear Extended Speed The maximum speed that an aeroplane can fly with the landing gear extended Landing Gear Operating Speed The maximum speed that the landing gear can be operated Landing Weight The gross weight of an aeroplane on landing including all contents but taking into account the expected usage of fuel and oil during the flight to the destination or alternate Mach Number The ratio of the true airspeed to the local speed of sound Mass The quantity of matter in a body. It determines the force exerted on that body by gravity which is inversely proportional to the mass. Maximum Brake Energy Speed (VMBE) The maximum speed on the ground from which an aeroplane can be safely stopped within the capabilities of the brakes. This speed may limit V1. Maximum Landing Weight The highest permissible weight of an aeroplane plus contents on landing. This weight takes into account all regulations, requirements and structural limitations Maximum Level Off/Height Referred to as the “5 minute point” as this is normally a time limit of 5 minutes from the start of take-off. It is the height where the aircraft must be levelled off to enable it to accelerate and for the flaps to be retracted thus a maximum time limit is imposed on the use of take-off thrust Maximum Take-Off Weight The maximum take-off weight is the highest permissible weight of an aeroplane including all contents Maximum Total Weight Authorised (MTWA) For take-off the maximum total weight of an aircraft and contents in accordance with the C of A in the most favourable circumstances anywhere

ATPL Performance ©Atlantic Flight Training 1-15
Maximum Operating Speed/Mach Number (VMO/VMO) This speed must not be deliberately exceeded in any flight condition. The speed has a safety net built in, allowing for minor deviations, which ensures the aeroplane remains free from problems such as buffet or other compressibility effects. Maximum WAT (Weight, Altitude, Temperature) Limit Weight The highest weight at which all relevant climb minima are achieved Maximum Weight The lowest of the three weights:
The maximum take-off weight The maximum weight at which flight other than take-off and landing is
permitted The maximum landing weight (other than an emergency situation)
Maximum Zero Fuel Weight The maximum weight of an aeroplane less the usable fuel that structural limits allows Measured Performance The average performance of one aeroplane or group of aeroplanes undergoing test conditions Minimum Control Speed (VMC) The lowest CAS at maximum take-off power that if a critical power unit fails then the aeroplane is controllable within the following limits:
Heading 20° of the original heading Bank Angle 5° maximum
The speed is always greater than VMCG and not more than 1.2 VS. Minimum Control Speed on the Ground (VMCG) With engines at maximum take-off power if a critical power unit fails then the following conditions apply using normal piloting skills:
The aeroplane can be steered by the use of aerodynamic means Nosewheel steering is not used The aeroplane maintains a parallel path not more than 30 feet from the
original path.
Minimum Control Speed on the Approach to Land (VMCL) The lowest speed on the approach to land with all power units operative. The speed is obtainable at all power settings. The speed is such that if a critical power unit fails it is possible to maintain control using no more than 5° bank and continue the approach safely.

ATPL Performance 30 October 2003 1-16
One Engine Inoperative - Minimum Control Speed on the Approach to Land (VMCL1) The lowest speed on the approach to land with one power unit inoperative. Straight flight should be maintained using no more than 5° bank and the approach continued safely. Two Engines Inoperative - Minimum Control Speed on the Approach to Land (VMCL2) The lowest speed on the approach to land with two power unit inoperative for three and four engined aeroplanes. Straight flight should be maintained using no more than 5° bank and the approach continued safely.
Minimum Take-Off Safety Speed (V2min) The minimum speed that V2 is in terms of CAS. It is never less than:
1.2 VS for
Two or three engined turbo-prop aeroplanes Turbo-jet aeroplanes without the provision for obtaining a
significant reduction in the one-engine inoperative power-on stalling speed
1.15 VS for
Turbo-prop aeroplanes with more than 3 engines Turbo-jet aeroplanes with the provision for obtaining a significant
reduction in the one-engine inoperative power-on stalling speed And 1.1 VMC
Nautical Mile ICAO define the nautical mile as 1852 m. This can also be taken as 6080 ft. Net Flight Path (NFP) The path of an aeroplane from the end of the TODR until 1500 ft net height above reference zero. NFP is calculated using net performance data Net Height The gross height reduced by a specified amount for safety reasons. This height is used to determine the compliance with obstacle clearance requirements Net Performance The gross performance reduced by a set margin. This is set by the Authority.
Obstacle All fixed (whether temporary or permanent) and mobile objects, or parts thereof that are located on an area intended for the surface movement of aircraft or that extend above a defined surface intended to protect aircraft in flight

ATPL Performance ©Atlantic Flight Training 1-17
Obstacle Clearance Altitude (OCA) or Obstacle Clearance Height (OCH) The lowest altitude or the lowest height above the elevation of the relevant runway threshold or the aerodrome elevation as applicable, used in establishing compliance with appropriate obstacle clearance criteria
Note: OCA is referenced to mean sea level and OCH is referenced to the aerodrome elevation or to the threshold elevation if that is more than 2 m (7ft,) below the aerodrome elevation. An OCH for a circling approach is referenced to the aerodrome elevation
Obstacle Elevation/Height The vertical distance of the uppermost point of any non-frangible obstacle. When an elevation is given then the reference is MSL. Where height is given then it is referenced to the Ordnance Datum Ordnance Datum The horizontal plane that passes through a point on the surface of a particular runway at the centre of the end of TODA. This datum was used to calculate the height of obstacles promulgated in the AIP Practicable Landing Weight The empty weight plus fuel for a 100 nm diversion plus 30 minutes hold with minimum flight and cabin crew plus 10% of payload Pressure Altitude The height in the International Standard Atmosphere where the prevailing pressure occurs. The altimeter is set to 1013.2 hPa. Where altitude is used in Performance Charts then this means “pressure altitude” Pressure Settings The following are the most likely pressure settings that a pilot will encounter:
QFE is air pressure reduced to the datum level of the airport applying corrections for the outside air temperature. QNH is QFE reduced to mean sea level using the assumed conditions of standard atmosphere and the elevation of the airport QFF is QFE reduced to mean sea level with regard to the actual outside
air temperature. This is for meteorological purpose only and must never to be used in pressure altimetry.
Reference Landing Speed (VREF) The speed in the landing configuration at screen height which is used to calculate the landing distance Reference Zero (RZ) The imaginary plane passing through a point 35 ft or 50 ft vertically beneath the aeroplane at the end of the TODR. This point is used to reference heights on the take-off flight path

ATPL Performance 30 October 2003 1-18
Required Navigation Performance (RNP) A statement of the navigation performance accuracy necessary for operation within a defined airspace. The aircraft remains within the specified distance for 95% of the time of flight Rotation Speed (VR) If the transition from the take-off run to becoming airborne is to be carried out in the optimum manner, it must be made at the correct speed. Dragging the aeroplane into the air at too low a speed (not necessarily a dangerous one) or holding it down until it fights to leave the ground will both detract from the performance standard. VR is the speed at which the pilot should initiate a change in attitude with the intention of leaving the ground. It varies with weight and flap setting, and may also be affected by altitude and temperature. It is set at a value which ensures that the aeroplane becomes airborne and achieves V2 (defined below) by the screen height. V1 must not exceed VR, but may equal it. VR is never less than V1 or 1.05VMC. The exact value depends upon:
TOW Flap setting Pressure altitude Temperature
Runway End Safety Area (RESA) An area symmetrical about the extended runway centre line and adjacent to the end of the strip primarily intended to reduce the risk of damage to an aeroplane undershooting or overrunning the aerodrome Runway Strip An area of specified dimensions enclosing a runway intended to reduce the risk of damage to an aircraft running off the runway and to protect aircraft flying over it when taking-off and landing Screen Height The height of an imaginary screen which the aeroplane would just clear when taking off or landing in an unbanked attitude with landing gear extended.
Slush Water-saturated snow which with a heel-and-toe slap down motion against the ground will be displaced with a splatter; Specific Gravity: 0.5 up to 0.8
Snow (On the ground)
Dry Snow Snow which can be blown if loose or, if compacted by hand, will fall apart again upon release
Specific Gravity Up to but not including 0.35 Wet Snow Snow which, if compacted by hand, will stick together and tend to form a snowball
Specific Gravity 0.35 up to but not including 0.45

ATPL Performance ©Atlantic Flight Training 1-19
Compacted Snow Snow which has been compressed into a solid mass that resists further compression and will hold together or break up into lumps if picked up
Specific Gravity 0.5 and over
Stabilising Altitude With one engine inoperative, the maximum altitude that a multi engine aeroplane can maintain level flight Standard Pressure Setting (SPS) The altimeter sub-scale setting 1013.2 hPa
Stopway A defined obstacle free rectangular area on the ground at the end of TORA the same width as the associated runway prepared as a suitable area in which an aeroplane can be stopped in the case of an abandoned take-off. The area is prepared so that the aeroplane can roll without hazard to occupants or structural damage. The following characteristics are similar to the runway:
Braking coefficient Strength Slope
Stalling Speeds For all the speeds below the stalling speed is also the minimum steady flight speed when no stalling speed is obtainable.
VS Calibrated stalling speed that is not less than 94% of the speed at which an aeroplane develops lift equal to its weight for a given configuration. If no stall is obtainable then this is the minimum steady flight speed where the aeroplane remains controllable VSO The stalling speed with flaps in the landing position VS1 The stalling speed with the aeroplane in a set configuration under consideration VS1g The stalling speed with the aeroplane in a given configuration VMS The lowest possible stalling speed taking for any combination of AUW and atmospheric conditions with the power at idle. The speed is where pitching or rolling motion occurs that is not immediately controllable VMS0 The lowest stalling speed, or minimum steady flight speed if no stall is obtainable, when the flaps are in the land setting. This is for any combination of AUW and meteorological conditions VMS1 The lowest possible stall speed for the configuration under consideration using the conditions above.

ATPL Performance 30 October 2003 1-20
VSR Reference stalling speed VSR0 Reference stalling speed in the landing configuration VSR1 Reference stalling speed in a given configuration VSW The speed where natural or artificial stall warning occurs
Take-Off Distance (TOD) The distance an aeroplane takes to accelerate from the brake release point (BRP) to VR and then climb to screen height Take-Off Distance Required (TODR) The calculated distance that an aircraft takes to take-off and attain screen height. This figure is calculated from the flight manual and has safety factors inbuilt. Take-Off Run (TOR) The distance an aeroplane takes to accelerate from the BRP to VLOF
Take-Off Run Required (TORR) The calculated distance required to complete the TOR factored for safety by a specific percentage. The distance is calculated from the flight manual for the specific meteorological conditions and aircraft configuration Take-Off Safety Speed (V2) If the aeroplane is rotated correctly at VR it will unstick shortly thereafter and climb away. V2 is the minimum speed to which the aeroplane should accelerate by the screen height with one engine inoperative. Like VR it is determined primarily by AUW and flap setting. It is the speed used widely in the determination of take-off performance and is linked to VR. We shall see later that there are occasions when by increasing V2 above “normal”, we may obtain better performance in the NFP. To achieve the higher V2 we must also increase VR, lengthening TORR. Take-Off Weight (TOW) The weight of an aeroplane at the commencement of the take-off. This is the gross weight at this time. Target Threshold Speed (VAT) The speed at which a pilot aims to cross the threshold in order to land the aeroplane. This speed is an average calculated for light winds and slight turbulence and is determined by AUW and flap setting. The related speeds may also be used:
VAT0 All power units operative This speed is not less than:
VMS1 + 22 knots or 1.3 VMS0 VMCL

ATPL Performance ©Atlantic Flight Training 1-21
The minimum demonstrated threshold speed + 5 knots
The final steady approach speed – 10 knots 1.08 x the pre-stall buffet speed in steady flight
VAT1 One power unit inoperative
This speed is not less than:
VAT0 VMCL + 5 knots where the critical power unit is
inoperative VMCL where two power units are inoperative for
three or four engined aeroplanes The final steady approach speed – 10 knots
where the critical power unit is inoperative
VAT2 Two power units inoperative
VTmax The maximum safe threshold speed. The speed is used to check that the performance calculations are within the landing field requirements. The speed is VAT0 plus a set figure (most aircraft use 15 knots). Where this speed is exceeded it is possible that the required field length will exceed the LDA. VTmin The minimum safe threshold speed. The lowest approach speed to be maintained at or before the threshold is reached. VTmin is the higher figure of VIMD + 5 knots or VS1g + 20%.
Traffic Load The total weight (including non-revenue load) of:
Passengers Baggage Cargo
True Airspeed The EAS corrected for density error Unaccelerated Flight Flight at a constant speed where there is no acceleration in any plane. Unbalanced Field Length Where ASDA and TODA are different lengths for a particular runway direction then it is considered to be an Unbalanced Field Length Unstick Speed See VLOF.

ATPL Performance 30 October 2003 1-22
VMU The lowest possible unstick speed for any combination of AUW and atmospheric conditions. At and above this speed, with all power units operative, the aeroplane can leave the ground and climb safely to screen height. A 5 knot margin between the lowest nose wheel raising speed and VR is accepted as normal. VUS The same as VLOF. The speed where the wheels leave the ground if the aeroplane is rotated at VR.
V3 The steady initial climb speed with all engines operating, that has to be achieved by screen height. It is never less than V2 + 10 knots V4 The steady take-off climb speed with all engines operative using the scheduled techniques and achieved by 400 ft gross height. It is never less than VMCA or 1.3 VMS1. The gross flight path does not drop below the gross flight path from which the net flight path is calculated. V5 Sometimes used as the one-engine inoperative en-route climb speed VA Design manoeuvring speed
VB Design speed for maximum gust intensity VC Design cruise speed VD Design dive speed VDD Design drag devices speed
VEF Used in performance calculations. The calibrated speed at which it is assumed that the most critical power unit fails. It is never less than VMCG VF Design flap speed. It is not less than:
1.6 VS1 at maximum TOM with take-off flap selected 1.8 VS1 at MLM with approach flap selected 1.8 VS0 at MLM with land flap selected
VFE Maximum speed to fly safely with flap extended VFTO Final take-off speed This is the speed of the aeroplane at the end of the take-off path in the fourth segment of a four segment net flight path, where one power unit is inoperative. The remaining engines are set at maximum continuous in the en-route configuration. For aeroplanes the following applies:

ATPL Performance ©Atlantic Flight Training 1-23
Speed Climb Gradient Twin engined 1.25VS 1.2% Three engined 1.25VS 1.5% Four engined 1.25VS 1.7%
VGO The lowest V1 from which a continued take-off is possible within the TODA VIMD Minimum drag speed This is the speed achieved at the lowest point of the total drag curve. VIMP Minimum power speed The speed achieved at the lowest point on the power curve. VLE The maximum speed that an aeroplane can be safely flown with the landing gear extended VLO The maximum speed that landing gear can be safely extended or retracted VLOF This term is also known as Unstick Speed. The speed at which the landing gear main wheels leave the ground if the aircraft is rotated at VR. The speed is directly related to the aeroplane weight and flap setting. VMAX TYRE The tyres have a maximum rotational speed if this is exceeded theforces generated within the tyre could cause the tyre to disintegrate. This limits the maximum speed for VLOF and therefore can limit the aircraft’s take-off mass. VMCA Minimum control speed in the climb VNE Never exceed speed. Set at 0.9 x VD VNO Maximum structural cruising speed, also referred to as still air speed is set at
0.89 x VNE
VR often termed “rotate” – the speed at which the aircraft is rotated at 3o a second
VRA The recommended turbulence speed. The speed is not less than the maximum gust intensity speed or greater then VMO – 35 knots VSTOP The highest decision speed that allows an aeroplane to stop within ASDA when a take-off is abandoned VX The maximum gradient of climb speed.

ATPL Performance 30 October 2003 1-24
VX1 One engine inoperative maximum gradient of climb speed for a three/four engined aeroplane.
VY The maximum rate of climb speed.
VY1 One engine inoperative maximum rate of climb speed for a three/four engined aeroplane. VYse One engine inoperative maximum rate of climb speed for a twin engined aeroplane.
VZF The minimum safe maneouvring speed with zero flap. Mainly used when the aeroplane is obeying noise abatement procedures. Water Equivalent Depth (WED) The depth of runway contaminant converted to an equivalent depth of water. This is calculated by the formula: WED Contaminant depth x SG of contaminant Weight The force exerted on a body by gravity. The weight is dependent on the mass and the strength of gravity. Weight = Mass in kg x Gravity in Newtons The weight of a body will vary with its position and elevation above MSL
Abbreviations ACN Aeroplane Classification Number AFM Aeroplane flight manual APS Aeroplane prepared for service ASD Accelerate stop distance ASDA Accelerate stop distance available ASDR Accelerate stop distance required AUW All up weight BE Brake energy BFL Balanced field length BRP Brake release point CAS Calibrated airspeed CDA Mean coefficient of drag in the air CDG Mean coefficient of drag on the ground EAS Equivalent airspeed

ATPL Performance ©Atlantic Flight Training 1-25
EMD Emergency distance EMDA Emergency distance available EMDR Emergency distance required EPR Engine pressure ratio ETOPS Extended range twin-jet operations GFP Gross flight path FUSS Flaps up safety speed IAS Indicated airspeed IAT Indicated temperature ISA International Standard Atmosphere LCG Load classification group LCN Load classification number LDA Landing distance available LDR Landing distance required MAP Manifold air pressure MAT Mass, altitude, temperature MCRIT Critical Mach Number MMO Maximum operating Mach Number MTWA Maximum total weight authorised MZFW Maximum zero fuel weight NFP Net flight path OCA/H Obstacle clearance altitude/height ODM Operating data manual PCN Pavement classification number RESA Runway end safety area RNP required navigation performance RZ Reference zero SG Specific gravity SR Specific range SAR Specific air range SFC Specific fuel consumption SPS Standard pressure setting TAS True airspeed TOD Take-off distance TODA Take-off distance available TODR Take-off distance required TOR Take-off run TORA Take-off run available TORR Take-off run required TOW Take-off weight V1 Decision speed

ATPL Performance 30 October 2003 1-26
V2 Take-off safety speed V3 Steady initial climb speed V4 Steady take-off climb speed V5 Sometimes used as the on-engine inoperative en-route climb speed VA Design manoeuvring speed VAT Target threshold speed VAT0 Target threshold speed with all power units operative VAT1 Target threshold speed with one power unit inoperative VB Design speed for maximum gust intensity VC Design cruise speed VD Design dive speed VEF Assumed speed at the time of engine failure VF Design flap speed VFE Maximum flap extended speed VFTO Final take-off speed VGO The lowest V1 from which a take-off is possible within the TODA VLE Maximum landing gear extended speed VLO Maximum landing gear operating speed VLOF Lift off speed VMAX Tyre Maximum structural speed for aircraft tyres VMBE Maximum brake energy speed VMC Minimum control speed VMCA Minimum control speed for take-off and climb VMCG Minimum control speed on the ground VMCL Minimum control speed on approach to landing VMO Maximum operating speed VMS Minimum stalling speed VMS0 Minimum stalling speed with flaps in the landing setting VMS1 Minimum stalling speed for the case under consideration VMU Minimum unstick speed VNE Never exceed speed VN0 Max speed in rough air VP Aquaplaning/hydroplaning speed VR Rotation speed VRA Turbulence speed (rough air airspeed) VREF Reference landing speed VS Stall speed VSO Stall speed with flaps in the landing configuration VS1 Stall speed in a specified configuration VS1g Speed at which an aeroplane develops lift equal to the aeroplane weight VSR Reference stalling speed

ATPL Performance ©Atlantic Flight Training 1-27
VSR0 Reference stalling speed in the landing configuration VSR1 Reference stalling speed in the specified configuration VSTOP The highest decision speed from which an aeroplane can stop within ASDA VSW The speed where the natural or artificial onset of stall warning occurs VTmax Threshold speed VTmin Maximum threshold speed VT Minimum threshold speed VUS Unstick speed VX Best angle of climb speed VY Best rate of climb speed VZF Minimum safe manoeuvring speed with zero flap
Note: In some cases the prefix M will be used instead of V. The M represents Mach
Number. WAT Weight, altitude, temperature WC Wind component WED Water equivalent depth ZFW Zero fuel weight

ATPL Performance 30 October 2003 1-28
Intentionally Left Blank

ATPL Performance ©Atlantic Flight Training 2-1
Chapter 2.
Basic Principles of Flight Introduction The following chapters discuss the segments of flight and the factors that affect them. In the early stage of this course the basic principles of flight and performance details are discussed. Reference to the JAR Performance Classes of aeroplane can be found in the later chapters. Forces on an Aeroplane There are four basic forces that affect an aeroplane in flight:
THRUST DRAG
LIFT
WEIGHT
Lift Drag Weight Thrust
Lift acts through the centre of pressure and Weight acts through the centre of gravity. Thrust and drag act in opposite senses, parallel to the direction of flight, through points, which vary with aircraft attitude and design. In steady level flight:-
Lift = Weight, and Thrust = Drag
Lift When air flows around an aerofoil the pressure differential set up over the upper and lower surfaces produces a force. This force acts perpendicular to the relative airflow, and is

ATPL Performance 30 October 2003 2-2
known as lift. In steady level flight lift directly balances the aircraft's weight. For a given airspeed the lower the weight, the lower the lift. Lift depends upon the following factors:
Forward speed Air density Air viscosity Wing shape and wing area Angle of attack The local speed of sound Condition of the surface of the aeroplane wing
Lift acts through the Centre of Pressure (CP) and can be calculated using the following equation:
Lift = CL ½ ρ V2S Where: CL Coefficient of Lift
ρ Air density V Free air velocity S Wing area
CL varies with:
Angle of attack Wing shape Weight
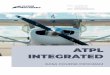
Variation of Coefficient of Lift with Angle of Attack To establish the effect of angle of attack on the lifting ability of a wing, a graph of coefficient of lift against angle of attack can be plotted. This is known as a lift curve and is used to highlight a number of important aerofoil section features.

ATPL Performance ©Atlantic Flight Training 2-3
1.2
1.0
0.8
0.6
0.4
0.2
0-4° 0° 4° 8° 12° 16°
FAST SLOW
CRITICAL ORSTALL ANGLE(ABOUT 16°)
USUAL ANGLES OFFLIGHT (0-16°)
ANGLE OF ATTACK
Between 0° and 12° angle of attack The graph is a straight line. This shows that the coefficient of lift, and hence lift is directly proportional to angle of attack in this region. Above 12° The rate of increase in lift reduces, and the curve eventually culminates in a peak. This peak represents the maximum coefficient of lift (CL max), which for this particular aerofoil section, occurs at approximately 15°. This angle varies for differing aerofoil sections. For most light aircraft this is a typical value. At angles of attack beyond this point, the lift curve drops rapidly downwards indicating a significant drop in the coefficient of lift and hence lift being developed. The angle of attack at which CL max is reached is known as the stalling angle of attack of the aerofoil. The normal flight range is considered to exist between 0° angle of attack and the stalling angle of attack.
The angle of attack is also related to the forward airspeed of the aeroplane:
Low airspeed – high angle of attack High airspeed – low angle of attack
Using the lift formula:
In level flight, at all altitudes, the angle of attack will be constant only if the IAS is constant (remember that if the IAS is constant as the altitude increases then the TAS will increase)
When climbing, the IAS is constant which means that the angle of attack will remain constant. As soon as the climb is related to Mach Number the IAS and the TAS reduce, this will result in a necessary increase in the angle of attack
If any angle of attack the IAS will change in direct proportion to the root of the weight of the aeroplane
When descending at a constant Mach Number:

ATPL Performance 30 October 2003 2-4
The IAS and TAS increase The angle of attack must decrease accordingly. This decrease in angle of
attack will increase both the:
Descent gradient Pitch angle
Drag During flight, all of the parts of an aircraft exposed to the airflow produce an aerodynamic force, which opposes the forward motion of the aircraft. This force is known as drag, and is the air resistance experienced by an aircraft as it moves through the air.
RELATIVEAIRFLOW
DRAG
Drag acts parallel to and in the same direction as the relative airflow. In steady level flight (SLF), drag is directly balanced by the thrust produced by an engine or propeller. It follows that, for a given airspeed, the lower the drag the less the thrust required to balance it. Low drag is therefore beneficial since it leads to reduced fuel consumption and lower operating costs. The total drag acting on an aircraft in flight comprises of:
Profile drag Induced drag Interference drag
Profile Drag Profile drag can be further separated into:
Form drag Skin friction drag

ATPL Performance ©Atlantic Flight Training 2-5
Form Drag
RELATIVEAIRFLOW
ABOVE ATMOSPHERICBELOW ATMOSPHERIC
Skin Friction Drag The reaction to the retardation of the airflow within the boundary layer is known as skin friction. In practice the amount of skin friction depends on the rate at which the air adjacent to the surface is trying to slide relative to it. The retarded air will try to drag the surface along with the flow, in much the same way as two solid surfaces sliding over each other do. This is known as shear stress, and is directly proportional to the speed of flow. The velocity profiles previously used to compare laminar and turbulent boundary layers also represent the shear stress patterns that exist between layers.
LAMINARPROFILE
TURBULENTPROFILE
LOW SKIN FRICTION DRAG HIGH SKIN FRICTION DRAG
The gradual velocity change associated with the laminar boundary layer shows that low shear stresses exist near the surface, resulting in low skin friction drag. Conversely the rapid velocity change associated with the turbulent boundary layer is evidence of high skin friction drag. If the conditions of flow were such that either a turbulent or laminar boundary layer could exist, laminar skin friction drag would be about one-third of that of the turbulent flow. Laminar boundary layers are therefore desirable, but the natural transition into a turbulent boundary layer prevents this occurring. The point where transition takes place is therefore important when determining the amount of skin friction drag that exists.

ATPL Performance 30 October 2003 2-6
Factors Affecting Skin Friction Drag The velocity of the airflow and the surface condition over which it is flowing will ultimately effect the position of the transition point.
Effect of Speed With increasing forward airspeed, the transition point moves progressively towards the leading edge resulting in a larger turbulent boundary layer. This causes greater skin friction drag. Effect of Surface Roughness If the upper surface of a wing has a roughened surface, it may result in a premature transition from a laminar to a turbulent boundary layer; for example the accumulation of ice. This will also cause a large increase in skin friction drag. The degree of skin friction drag may be minimised by polishing and de-icing the surface.
Since all of the aircraft skin is exposed to the airstream, this type of drag will affect all surfaces. Interference Drag When an aircraft is considered as a whole, the total drag acting on it may be greater than the sum of the drags of its individual components. This is a result of the airflow being greatly disturbed where the various components are joined together, principally between the wing and fuselage. The disturbance that is imparted to the airflow produces additional drag, known as Interference Drag.
INTERFERENCEDRAG
DRAG
DRAG
This type of drag occurs because a large pressure gradient is set up across the junction that causes the boundary layer to prematurely separate from the surface and form a turbulent wake. To minimise this effect suitably shaped fairing or fillet is placed over the intersection to encourage streamline flow, thereby reducing interference drag. Minimising interference drag is particularly important at high airspeeds.
Note: The sum of Profile and Interference Drag is sometimes referred to as Parasite Drag and is attributed to those parts of an aircraft that do not contribute to lift.

ATPL Performance ©Atlantic Flight Training 2-7
Induced Drag Whenever a wing is producing lift concentrated vortices are formed at the wing tips. These vortices are strongest at the wing tips and become progressively weaker towards the centre-line of the aircraft.
WING
TRAILINGEDGE
VORTEX
LEFT-WING VORTEX RIGHT-WING VORTEX
TRAILING EDGE CENTRE-LINE OF AIRCRAFT
These vortices induce downwash to the airflow behind the wing, causing the lift vector to tilt rearwards. The horizontal component of lift opposes the forward flight of the aircraft, and is known as induced drag.
LIFT
DRAG
ANGLE OF INDUCEDDOWNWASH
FREE STREAM RELATIVE AIRFLOW
EFFECTIVERELATIVEAIRFLOW
CHORD LINE
INDUCEDDOWNWASHe
INDUCED DRAG
The larger the vortex, the greater the induced downwash, and the greater the induced drag. The formula for induced drag is:
Induced Drag (DI ) =
A
2CLπ ½ρV2 S
where CL = Coefficient Of Lift A = Aspect Ratio ρ = Density (kg/m3) V = Velocity m/s

ATPL Performance 30 October 2003 2-8
S = Planform Surface Area (m2)
A
2CLπ = Coefficient of Induced Drag
Factors Affecting Induced Drag From the induced drag formula the main factors affecting induced drag are wing planform, aspect ratio, speed and weight/lift.
Effect of Planform This is the principal factor affecting induced drag. The size of the wing tip vortex is directly related to the length of the wing tip chord, and also the larger the vortexes, the lower the sectional effective angle of attack.
14
12
10
8
6
4
2
10 20 30 40 50 60 70 80 90 100
RECTANGULAR
TAPERED
ELLIPTICAL
% SEMI-SPAN
EFFECTIVEANGLE OFATTACK (°)
TIP
Clearly a rectangular planform wing produces a much larger vortex than the tapered section. This is because the wider the tip chord, the greater the spillage of air from the lower surface onto the upper surface, and the larger the wing tip vortex. In aerodynamic terms, the elliptical planform wing is the most aerodynamically efficient because the downwash remains constant across the complete wingspan, giving minimal induced drag.
LIFT
CONSTANT DOWNWASH

ATPL Performance ©Atlantic Flight Training 2-9
From a practical point of view however, the manufacturing and structural problems associated with an elliptical planform wing preclude its use. For structural reasons, a straight tapered wing provides a good compromise, giving low induced drag.
PREFERRED PLANFORM FORPURELY STRUCTURALCONSIDERATIONS
ELLIPTICAL PLANFORM FORMINIMUM INDUCED DRAG
To preserve the aerodynamic efficiency, the resulting planform is usually tailored, by using wing twist and cross sectional variation, in order to obtain as near as possible the elliptical lift distribution. Effect of Aspect Ratio Another practical method of minimising induced drag is to make the wingspan as long as possible i.e. increase the aspect ratio. This has the effect of reducing the overall size of the wing tip vortices, and hence induced drag.
LOW ASPECTRATIO
HIGH ASPECTRATIO
Induced drag varies inversely with aspect ratio. Effect of Airspeed Induced drag is most significant at low airspeeds and high angles of attack i.e. during take-off and landing, when it can account for approximately three-quarters of the total drag. To maintain steady level flight, as the airspeed reduces and the angle of attack increases, the slower passage of air rearwards over the wing will increase the spanwise flow of air around the wing tip. This will result in larger wing tip vortices and greater induced drag.

ATPL Performance 30 October 2003 2-10
INDUCEDDRAG
SLOW SPEED
INDUCEDDRAG
HIGH SPEED
INDUCEDDRAG INDUCED
DRAG
AIRSPEEDSLOWHIGHAOA
FASTLOWAOA
0
Induced drag is inversely proportional to airspeed².
L
W
L
W
SAME SPEED, BUT MANOEUVRING
L
W
DD
WSAME SPEED, BUT HEAVIER
L
Drag Formula Like lift, a drag formula can also be derived. The drag acting on an aircraft depends on the following factors:
Shape Angle of attack Air density (ρ) Air velocity squared (free stream air velocity) (V2) Wing planform surface area (S)
Dynamic pressure takes into account the air density and velocity, but when this pressure is combined with the wing planform surface area (S) it produces a force. This force is known as drag. Like lift, drag is not exactly equal to the dynamic pressure times the area, but varies with shape and angle of attack. These factors are represented by the Coefficient of Drag (CD). The general drag formula is therefore: Drag = CD ½ ρ V²S

ATPL Performance ©Atlantic Flight Training 2-11
A graph of Coefficient of Drag against angle of attack illustrates how drag varies in flight.
0.28
0.24
0.20
0.16
0.12
0.08
0.04
0-4° 0° 4° 8° 12° 16° 20°
ANGLE OF ATTACK
COEFFICIENTOF DRAG
0° 15°
STALLINGANGLE
ORDINARY ANGLESOF FLIGHT
Drag Curves Plotting graphs of profile or parasite drag and induced drag on the same axes shows the relationship between them.
SLOW FAST
TOTALDRAG PROFILE OR
PARASITE DRAG
INDUCED DRAGMINIMUM DRAG
VELOCITYVMIN D
DRAG
The two drags can be added together at any velocity to produce a total drag curve but it is essential to remember that this curve only applies to an aircraft of constant weight and configuration in level flight at any given altitude. Total drag becomes a minimum when the profile or parasite drag, and induced drag are equal. This is known as the minimum drag point and occurs at the minimum drag speed (VIMD). This is the speed where the required lift is developed with the minimum amount of drag, and is also the most economical speed at which an aircraft flies.

ATPL Performance 30 October 2003 2-12
Minimum Drag Velocity The minimum drag velocity for propeller and jet aeroplanes in a clean configuration is:
Propeller Aeroplanes 1.3VS
Jet Aeroplanes 1.6VS (for a jet aeroplane VIMD is always greater than
VIMP) Effect of Weight on the Drag Curves If the weight of an aircraft alters, a corresponding change in the coefficient of lift must occur if level flight is to be maintained at a given airspeed. It follows that since induced drag is proportional to CL² (or weight²); any change in weight will also alter the total drag curve.
TOTAL DRAG
HIGH WEIGHTW
TOTAL DRAG
LOW WEIGHTW
PROFILE ORPARASITEDRAG CURVE
INDUCED DRAG CURVES
DRAG
VIMD VELOCITYW1 W2
VIMD
1
2
Any change in weight will move the point at which the induced drag and profile drag curves cross. This will lead to a change in the minimum drag speed; e.g. an increase in weight will increase VIMD as well as the total drag.

ATPL Performance ©Atlantic Flight Training 2-13
Lift/Drag Ratio To determine the efficiency of an aircraft, it is necessary to consider the lift and drag curves together.
1.4
1.2
1.0
0.8
0.6
0.4
0.2
0-4° 0° 4° 8° 12° 16°20° ANGLE OF ATTACK
0° 15° 0.28
0.24
0.20
0.16
0.12
0.08
0.04
0-4° 0° 4° 8° 12° 16°20° ANGLE OF ATTACK
0° 15°
STALLINGANGLE
STALLINGANGLE
ORDINARY ANGLES OF FLIGHT
ORDINARY ANGLES OF FLIGHT
CL CD
For maximum efficiency the wings should produce maximum lift with the least possible drag. The lift curve shows that maximum lift is achieved at 15° angle of attack, whereas the drag curve shows minimum drag occurs at -2° angle of attack. Neither of these angles is satisfactory, since the ratio of lift to drag at both extremes is very low. In practice maximum lift at minimum drag, i.e. maximum lift/drag ratio (L/D Ratio), should occur at the same angle of attack. To establish where this occurs it is necessary to examine the Lift/Drag ratio at various angles of attack using the lift and drag formulae's. The Lift/Drag ratio for an aerofoil at any selected angle of attack can be found using the following formula:
DragLift =
SV 1/2 C
SV 1/2 C
2D
2L
ρ
ρ = C
C
D
L
Notably the same result is obtained irrespective of whether the lift and drag, or their coefficients are used in the calculations. By plotting lift/drag ratio against angle of attack it is possible to establish where the most efficient angle of attack occurs.

ATPL Performance 30 October 2003 2-14
28
24
20
16
12
8
4
0-4° 0° 4° 8° 12° 16° 20°ANGLE OF ATTACK
0° 3° 15°
LIFT/DRAGRATIO
ORDINARY ANGLESOF FLIGHT
STALLINGANGLE
MOSTEFFICIENTANGLE
The diagram above shows that the lift/drag ratio increases rapidly up to about 3 or 4°, at which point the lift is nearly 24 times the drag, but this figure varies depending on the type of aerofoil. For transport aircraft this value is typically 12–20, and for propeller powered trainer aircraft is typically 10-15. At higher angles of attack the lift/drag ratio steadily reduces because, even though the Coefficient of Lift (CL) continues to increase, the Coefficient of Drag (CD) increases at a greater rate. In fact, at the stalling angle, lift may only be 10 to 12 times greater than drag. The most important point on the lift/drag curve is the angle of attack that gives the best lift/drag ratio, in this case 3 or 4°. This is the most efficient (optimum) angle of attack at which the aerofoil gives its best all round performance, i.e. it produces the required lift for the minimum cost in drag. At any other angle of attack the same lift will be obtained at a greater cost in drag. In steady level flight since drag is balanced by thrust, it follows that, by minimising drag, thrust can also be minimised. This allows a smaller engine to be fitted, resulting in better fuel economy, and lower maintenance costs. In practice most aircraft are not fitted with an instrument which indicates angles of attack, so the pilot must rely on the airspeed indicator, since airspeed is related to angle of attack.

ATPL Performance ©Atlantic Flight Training 2-15
IAS
2° AOA
150 85 IAS
8° AOA
IAS
12° AOA
65
L
W
L
W
L
W
The minimum drag speed is therefore related to the angle of attack that gives the best lift/drag ratio, i.e. 3 or 4°. Consequently aircraft are flown at the minimum drag speed to give best all round performance, but remember this is only correct for a given weight, and any change in weight will necessitate a change in airspeed to maintain the best lift/drag ratio. The best lift/drag ratio is also unaffected by changes in altitude. Effect of Altitude At altitude less lift is developed because of the decrease in the density of the air. This means that at altitude to maintain level flight either:
The angle of attack has to be increased, or The speed has to be increased
At high TAS the effects of compressibility increases the loss of lift. By contrast, at high altitude the air density decrease decreases the drag generated. Unfortunately, to compensate for the loss of lift an increase in angle of attack increases the drag generated. This offsets the reduction due to decrease in air density. Weight Weight is the gravitational force of attraction that the earth exerts on a body of given mass - measured in kilograms (kg).
Weight = Mass x Acceleration Due to Gravity Unlike the mass of a body, which remains constant irrespective of its location, the weight of a body varies with distance between the body and the centre of the earth. This is because acceleration due to gravity varies with geographical location and altitude, but under standard conditions this term is assumed to be 9.81 m/s2. Lift acts through the Centre of Pressure; Weight acts through the Centre of Gravity.

ATPL Performance 30 October 2003 2-16
Lift/Weight Couple Lift acting behind weight causes a nose-down pitch moment and lift acting in front of weight causes a nose-up pitch moment.
CoG
LIFT
WEIGHT
CoP
NOSEDOWN
CoG
LIFT
WEIGHT
CoP
NOSEUP
During a flight the weight will reduce as fuel is burnt. This reduction in weight will require a reduction in lift. As a consequence:
When the speed is kept constant then excess lift is produced and the aeroplane will “cruise” climb
If the aeroplane is held in level flight the:
Angle of attack will have to be reduced, which will cause a resultant Increase in speed
If the aeroplane is to fly a normal cruise leg in unaccelerated level flight then the thrust must be reduced. Thrust Power available decreases with an increase in altitude. Piston Engined Aeroplanes The Effects Of Altitude On Engine Performance Since air density affects the power output of an engine at a specified MAP and RPM, consideration needs to be taken on the effects of pressure, temperature and humidity on the air density. There are some terms relating to altitude that need to be considered:
Pressure Altitude This is the pressure at standard temperature and requires no correction unless humidity is a factor Density Altitude This is pressure altitude corrected for non-standard temperature

ATPL Performance ©Atlantic Flight Training 2-17
Critical Altitude This is the maximum altitude at which an engine will maintain a given horsepower output. In other words, an engine may be rated at a particular altitude which is the highest level rated power output can be obtained. Superchargers and Turbochargers increase the critical altitude.
Unsupercharged Engine With an unsupercharged engine the power produced decreases with decreasing density either high temperature or low pressure. The power falls as altitude increases Supercharged Engine With a supercharged engine the power can be maintained with increasing altitude although temperature increases do cause a loss in power. Eventually the critical altitude will be reached where the power begins to fall with altitude.
Since power depends on air density, pressure altitude must be converted to density altitude. If the temperature at a particular altitude is the same as standard, then no correction for density is required and a typical correction chart is illustrated below:
It can also be calculated by using the formula:
Density Altitude = Pressure Altitude + (Temperature Deviation x 118.8)
For every 1°C that the environmental temperature differs from ISA, the density altitude will differ from the pressure altitude by approximately 120 ft.

ATPL Performance 30 October 2003 2-18
Therefore, if the QFE of an airfield is 1013mb and the temperature is plus 20ºC the pressure altitude will be equivalent to sea level. To calculate the density altitude:
(Temperature – ISA conditions) x 120
(20 – 15) x 120 = 5 x 120 = 600
The density altitude will be approximately 600ft above sea level. Pressure, temperature and humidity affect the density of air and hence power output in the following ways. A reduction in pressure will reduce the density and therefore power output, a temperature reduction will increase density and therefore power output and an increase in humidity will reduce density, hence power output. The main factors that are considered in engine performance are effects of pressure and temperature. With altitude the pressure and temperature decrease, where the pressure reduction reduces density and the temperature drop increases density. This interrelationship results in the temperature reduction offsetting the pressure drop, however the effect of pressure is greater than the effect of temperature resulting in a drop in power with altitude. Propeller Aeroplanes Propeller efficiency decreases with altitude increase. For a fixed blade angle, with variations in forward speed the angle of attack will alter. As the forward speed increases, the angle of attack decreases and with it thrust. This gives an initial increase in efficiency.
Fixed pitch propellers in common with most aerofoils, will operate at their best efficiency only under one set of conditions usually at the cruise, but until this condition is reached the angle of attack of the propeller blades will be comparatively large, and will therefore suffer a loss of efficiency. During take off the angle of attack of the blades of such a propeller would be extremely large, and result in poor acceleration, and hence a longer take off run. In the cruise condition the angle of attack is at its optimum that is small, therefore limiting forward speed to

ATPL Performance ©Atlantic Flight Training 2-19
prevent engine overspeed. Therefore should a fixed pitch propeller be designed to give an improved take off then its forward speed in the cruise will be reduced. These disadvantages have led to the development of variable pitch or constant speed propellers. The diagram below illustrates the characteristics of various fixed pitch propeller angles versus a constant speed propeller at various airspeeds.
Therefore in order for the propeller to be efficient over the whole operating range then the blade angle needs to vary to maintain the optimum angle of attack of the blade, which is approximately 2 to 4°. As forward speed is increased the blade angle needs to increase to maintain the same angle of attack. If an engine is supercharged power can be maintained when the aeroplane’s altitude is increased. Any increase in temperature results in the air density decreasing and will lead to a loss of power. Jet Engine Aeroplanes Thrust is produced by the mass airflow through the engine and the acceleration imparted to it. The simple equation is:
T = Ma
M = Mass Airflow a = Acceleration
From a simplistic view, in the case of a propeller there is a large mass airflow and a small acceleration, whilst in a gas turbine there is a small mass airflow and a large acceleration.

ATPL Performance 30 October 2003 2-20
The net thrust produced is the difference between the amount of thrust produced by the engine minus the momentum drag produced in the intake. The momentum drag is offset by a “ram effect” which increases the pressure at the intake. The thrust will decrease with increase in speed.

ATPL Performance ©Atlantic Flight Training 3-1
Chapter 3.
Aerodrome Characteristics References: Annex 14 Aerodromes
CAP 168 Licensing of Aerodromes JAR OPS
Introduction This chapter brings together the information necessary about the aerodrome including such areas as:
Aerodrome Reference Code Declared distances Alignment procedures Meteorological influences ACN/PCN Runway contamination Runway slope
Aerodrome Reference Code All airfields have an aerodrome reference code number and letter which is determined in accordance with the characteristics of the aeroplane for which an aerodrome facility is intended.
Code Number The code number is selected corresponding to the highest value for the aeroplane reference field length of the aeroplanes for which the runway is intended. The aeroplane reference field length is for the selection of the code number and is not intended to influence the actual runway length provided. The number is found by selecting the higher value of the declared TODA or ASDA. Code Letter The code letter is determined by selecting the code letter that corresponds to the greatest wing span or the greatest outer main gear wheel span whichever gives the more demanding code letter of the aeroplane for which the facility is intended.

ATPL Performance 30 October 2003 3-2
Code Element 1 Code Element 2
Code Number Aeroplane Reference
Field Length
Code Letter Wing Span Outer Main Gear Wheel Span*
1 Less than 800 m A Up to but not including 15 m
Up to but not including 4.5 m
2 800 m up to but not including
1200 m
B 15 m up to but not including 24 m
4.5 m up to but not including 6 m
3 1200 m up to but not including
1800 m
C 24 m up to but not including 36 m
6 m up to but not including 9 m
4 1800 m and over
D 36 m up to but not including 52 m
9 m up to but not including 14 m
E 52 m up to but not including 65 m
9 m up to but not including 14 m
* Distance between the outside edges of the main gear wheels Runway The runway is a rectangular area on a land aerodrome prepared for the landing and taking-off of aeroplanes. Separate criteria apply to a runway serving as a visual runway and to a runway serving as an instrument runway. The ability to meet the criteria will determine what length of runway may be declared for what purpose. Width Runways both paved and unpaved should have the following minimum widths:
Code Letter Code
Number A B C D E
1 18 m 18 m 23 m 2 23 m 23 m 30 m 3 30 m 30 m 30 m 45 m 4 45 m 45 m 45 m
The width of a precision approach runway should be not less than 30 m where the code number is 1 or 2. Declared Distances The distances defined in the following pages are from the references given at the start of the chapter. The definitions given initially are those from JAR OPS 1. If major differences are found from other documents then the definition from this document will be given in Italics with the document reference.

ATPL Performance ©Atlantic Flight Training 3-3
Take-Off Run Available The length of runway which is declared available by the appropriate Authority and suitable for the ground run of an aeroplane taking off. Definitions can vary slightly from this especially when a number of documents are being used. For instance the CAP 168 definition is:
The distance from the point on the surface of the aerodrome at which the aeroplane can commence its take-off run to the nearest point in the direction of take-off at which the surface of the aerodrome is incapable of bearing the weight of the aeroplane in normal operating conditions (CAP 168)
Clearway
Take-off Distance Available
Accelerate Stop Distance Available
Take-off Run Available
Runway
Runway
Stopway
Stopway
Edge of Instrument Runway Strip
Edge of Visual Runway Strip
first upstanding
obstacle
Clearway
UK Clearway

ATPL Performance 30 October 2003 3-4
The runway having the following uniform characteristics in:
Slope In the UK the slope must not exceed:
1.5% where the code number is 4 2% where the code number is 3 2.5% where the code number is 2 3% where the code number is 1
Bearing Strength The runway needs to be of a sufficient strength to allow aeroplanes to operate without risk of damage to themselves and the pavement. This strength needs to be uniform over the whole of the runway.
Braking Coefficient The friction characteristics of the runway must not fall below pre-accepted levels. This level is monitored periodically by the aerodrome authority. Runway Alignment On some runways the aeroplane may have to take some distance to line up along the runway centreline. This distance will be subtracted from the TORA. Obstructions The nature of any obstacle and its relation to the runway has to be taken into account. Any obstacle that cannot be controlled such as trains, automobiles etc may cause extra limitations.
The runway must also be free of non-frangible obstacles. Clearway A defined rectangular area on the ground or water under the control of the appropriate authority, selected or prepared as a suitable area over which an aeroplane may make a portion of its initial climb to a specified height. The clearway is beyond TORA in the direction of the extended centre line. The first non-frangible obstacle that can endanger an aeroplane in flight restricts the length of the clearway. The clearway cannot exceed the least of:
50% of the TORA. The distance to the first non-frangible object
Frangible objects are allowed to be up to 0.9m above the ground. The clearway width is:
UK The Clearway has a starting semi-width of half the runway strip at the end of TORA. This expands to 90 m for Code 3 and 4 aerodromes forming a triangular shaped area.

ATPL Performance ©Atlantic Flight Training 3-5
ICAO The semi-width is rectangular 75 m either side of the extended runway centreline
Within the clearway no part of the ground should project above an upward slope of:
1.25% for an aerodrome code number 3 or 4 2% for an aerodrome code number 1 or 2
Where the ground falls away at a gradient of more than:
1.25% for an aerodrome code number 3 or 4 2% for an aerodrome code number 1 or 2
Then the clearway length depends upon how far the ground falls away:
Where the ground profile is up to 9 metres below the horizontal plane of the runway level the clearway length can be taken as the lengths previously stated.
Where the ground profile is more than 9 metres below the horizontal plane of the
runway level the clearway length cannot exceed the distance where the appropriate Take-Off Climb Surface (TOCS) intersects the horizontal plane when extended downwards from the first obstacle.
Clearway
Horizontal Plane
first upstanding
obstacle
< 0.9m
> 0.9m
Clearway
Horizontal Plane TOCS

ATPL Performance 30 October 2003 3-6
Take-Off Distance Available (TODA) The declared distance available for an aeroplane to take-off and attain screen height. TODA can comprise of TORA plus clearway. TODA is limited to 1.5 x TORA or to the first non-frangible obstacle liable to damage the aeroplane during a take-off, whichever is the shorter. Landing Distance Available (LDA) The length of the runway which is declared available and suitable for the ground run of an aeroplane landing. The area has to have the same characteristics as those for take-off. To illustrate LDA use the diagram on page 3 and replace TORA with LDA. The LDA starts at the runway threshold and continues for the length of the runway. Where there is a displaced threshold then the LDA may be less than the physical length of the runway.
Stopway A defined obstacle free rectangular area on the ground at the end of TORA the same width as the associated runway prepared as a suitable area in which an aeroplane can be stopped in the case of an abandoned take-off. The area is prepared so that the aeroplane can roll without hazard to occupants or structural damage. The following characteristics are similar to the runway:
Braking Coefficient The breaking characteristics should be similar to the runway to which it is associated Strength The Stopway is designed for emergency use and does not need the same bearing strength as the associated runway. The load bearing capacity should be sufficient to support an aeroplane without causing structural damage. Slope The rate of change of the slope should not exceed:
0.3% per 30 m where the aerodrome code is 3 or 4 0.5% per 30 m where the aerodrome code is 1 or 2
Width The width of the Stopway is the same as the associated runway.
Runway Alignment The length of the runway which is declared for the calculation of TODA, ASDA and TORA, does not take into account the line-up of the aeroplane in the direction of take-off on the runway in use. This alignment distance depends on:
The aeroplane size The access to the runway in use

ATPL Performance ©Atlantic Flight Training 3-7
Calculations are made for a 90° taxiway entry to the runway and 180° turnaround on the runway. There are two distances to be considered which are shown in the diagram below:
The minimum distance of the main wheels from the start of the runway for determine TODA and TORA - L, and
The minimum distance of the most forward wheel from the start of the runway for
determine ASDA - N
Meteorological Data An operator must take account of the following:
The pressure altitude at the aerodrome The density altitude at the aerodrome The ambient temperature at the aerodrome, and Not more than 50% of the reported head-wind component or not less than 150%
of the reported tailwind component
Aircraft Classification Number — Pavement Classification Number (ACN/PCN) The pavement that forms part of the movement area has to he of sufficient strength to allow aircraft to operate without risk of damage to:
The pavement or To the aircraft,
Pavements that are subject to overload conditions will deteriorate quicker than pavements that are not subject to overload conditions. To control this it is necessary to classify the

ATPL Performance 30 October 2003 3-8
pavement and aircraft under a system whereby the load bearing capacity of the pavement and the loads imposed by the aircraft can be compared. The method used is the Aircraft Classification Number — Pavement Classification Number (ACN/PCN) method. As stated previously, all pavements forming part of the movement area should he of adequate bearing strength for the types of aircraft expected to use the aerodrome. Reporting Pavement Bearing Strength The ACN/PCN method has been developed by ICAO as the international method of reporting the bearing strength of pavements. ACNs are numbers giving a relative load rating of the aircraft on pavements for certain specified sub-grade strengths. ACN values for most aeroplanes have been calculated by ICAO and are published in Aeronautical Information Publications. The PCN is a number which represents the load bearing strength of the pavement in terms of the highest ACN which can be accepted oil the pavement for unrestricted use. Airfield surfaces are classified according to their strength and rated with a PCN. This PCN value indicates that aircraft with ACNs appropriate to the pavement type and specified sub-grade that are equal to or less than the reported PCN can use the pavement without restriction. As an alternative a PCN can he identified and reported without a technical evaluation of the pavement by means of an assessment of the results of aircraft using the pavement. Providing the type and sub-grade support strength of the pavement are known, the ACN of the most critical aircraft successfully using the pavement can he reported as the PCN. A PCN is reported in a five-part format. Apart from the numerical value, notification is also required of the pavement type (rigid or flexible) and the sub-grade support category. Additionally, provision is made for the aerodrome authority to Iimit the maximum allowable tyre pressure. A final indication is whether the assessment has been made by a technical evaluation or from past experience of aircraft using the pavement. PCN Reporting Where the pavement is to be used by aeroplanes with a ramp mass greater than 5700 kg the following information is given:
The PCN The pavement type for ACN/PCN comparison The subgrade category strength The maximum allowable tyre pressure The evaluation method

ATPL Performance ©Atlantic Flight Training 3-9
Pavement Type The pavement is either classed as:
Rigid When the pavement is made of concrete slab – Code R Flexible When the pavement is made up of a series of layers – Code
F
Subgrade Strength Category
High Code A Medium Code B Low Code C Ultra Low Code D
Maximum Allowable Tyre Pressure
High No tyre pressure limit - Code W Medium Pressure limited to 1.5 MPa (Approx 217 psi) - Code X Low Pressure limited to 1 MPa (Approx 145 psi) - Code Y Very Low Pressure limited to 0.5 MPa (Approx 72 psi) – Code Z
Evaluation Method
Technical Evaluation Done by a specific study of the pavement characteristics and the application of pavement behaviour technology – Code T Using Aircraft Experience The observation of a specific aircraft regularly using the pavement – Code U
Example PCN80/R/B/W/T
The PCN is 80 Rigid pavement of medium strength There is no tyre pressure limitation Assessed by technical evaluation

ATPL Performance 30 October 2003 3-10
Where the pavement is to be used by aeroplanes with a ramp mass equal to or less than 5700 kg then the information is given in the following format:]
Maximum allowable aeroplane mass Maximum allowable tyre pressure
Example 5000kg/0.50Mpa
ACN Reporting The ACN is normally calculated for the:
Maximum take-off mass, and Operating mass empty
For any other weight the ACN will have to be calculated using the formula: ACNMAX – ((Max Wt – Actual Wt) x (ACNMAX - ACNMIN) ÷ (Max Wt – Empty WT)) Overload Operations An individual aerodrome is allowed to permit overload operations as long as the pavement remains safe for use by an aeroplane. PCN has a safety factor allowed for which means that an aeroplane with an ACN 10% greater than PCN would be acceptable as long as the pavement is in good condition. Previous documents have used the following guide for overload operations:
% ACN Exceeds PCN Conditions to be Satisfied Before Movement Can be Considered Acceptable
10% Pavement older than 12 months No visible signs of pavement damage Overload operations are no greater than 5% of the annual movements Overload operations are spread evenly throughout the year
10% - 25% All the above plus Regular inspections by the aerodrome authority Immediate cessation of overload operations if damage becomes visible
25% - 50% Inspection of the pavement before and after each overload movement
Over 50% Emergency only

ATPL Performance ©Atlantic Flight Training 3-11
Runway Strip Strength A runway strip should be flush with:
The runway The runway shoulder The stopway
along their common edges. The bearing strength should taper away from the runway to assist in stopping an aeroplane. Rapid changes in the bearing strength should be avoided. Runway Contamination JAR Definitions for Runway Contamination For performance purposes, a damp runway, other than a grass runway, is considered to be dry.
Contaminated Runway A runway is considered to be contaminated when more than 25% of the runway surface area (whether in isolated areas or not) within the required length and width being used is covered by the following:
Surface water more than 3 mm (0·125 in) deep, or by slush, or loose
snow, equivalent to more than 3 mm (0·125 in) of water;
Snow which has been compressed into a solid mass which resists further compression and will hold together or break into lumps if picked up (compacted snow); or
Ice, including wet ice.
Damp Runway A runway is considered damp when the surface is not dry, but when the moisture on it does not give it a shiny appearance.
Dry Runway A dry runway is one which is neither wet nor contaminated, and includes those paved runways which have been specially prepared with grooves or porous pavement and maintained to retain 'effectively dry' braking action even when moisture is present.
Wet Runway A runway is considered wet when the runway surface is covered with water, or equivalent, less than specified in subparagraph (a)(2) above or when there is sufficient moisture on the runway surface to cause it to appear reflective, but without significant areas of standing water.

ATPL Performance 30 October 2003 3-12
Reporting of Contamination The depth of contaminant is measured by a standard depth gauge at 300 metre intervals along the runway, between 5 to 10 metres from the centreline. The depth is then reported for each third of the runway in millimetres. The nature of the surface is assessed subjectively:
Dry Snow SG less than 0.35 Temperature < -5°C Dry snow is in the form of pellets which can be blown. When compacted the snow does not form a snowball but falls apart Maximum depth for take-off and landing 60 mm on any part of the runway measured by ruler. With very dry snow this limit may be increased to 80 mm.
Wet Snow SG 0.35 to 0.5
Temperature -5° to –1°C When compacted the snow forms a snowball Maximum depth 15 mm
Compacted Snow SG over 0.5
Snow that is compressed. The compaction holds together or breaks into ice like lumps when lifted. Caused by aeroplanes or vehicles transiting over the movement area when snow is falling
Slush SG 0.5 to 0.8
Temperature approximately 0°C A mixture of snow and water. The difference between wet snow and slush is that when wet snow is stamped on it does not splash. Maximum depth 15 mm
Standing Water SG 1
Temperature >0°C Visible water standing on the surface. More than 3 mm of water exists if water rises back to the surface after foot pressure
Ice Frozen contaminant on the surface. Can affect the friction coefficient for braking

ATPL Performance ©Atlantic Flight Training 3-13
Water On A Runway Whenever water is present on a runway, a description of the runway surface conditions on the centre half of the width of the runway, including the possible assessment of water depth where applicable should be made using the following terms:
DRY The surface is not affected by water, slush, snow or ice This is not reported to the pilot
DAMP The surface shows a change of colour due to moisture If there is sufficient moisture to produce a surface film or the surface appears reflective the runway will be reported as WET
WET The surface is soaked but there is no standing water Standing water is considered to exist when water on the runway surface is deeper than 3 mm. Patches of standing water covering more than 25% of the assessed area will be reported as WATER PATCHES
WATER PATCHES Significant patches of standing water are visible FLOODED Extensive standing water is visible
Flooded will be reported when more than 50% of the assessed area is covered by water more than 3 mm deep.
Contaminated Runway The following applies for JAR-OPS performance purposes:
Not Contaminated DRY, DAMP or WET Contaminated WATER PATCHES, FLOODED
Information that a runway may be slippery when wet is normally made available. A runway is determined as being slippery when wet when the measurements specified by a continuous friction measuring device are below the minimum friction level specified by the State. Determination of Friction Characteristics of Wet Paved Runways The friction of a wet paved runway should be measured to:
Verify the friction characteristics of new or re-surfaced paved runways when wet Assess periodically the slipperiness of paved runways when wet Determine the effect on friction when drainage characteristics are poor Determine the friction of paved runways that become slippery under unusual
conditions Snow, Slush Or Ice On A Runway Whenever a runway is affected by snow, slush or ice and it has not been possible to clear the precipitant fully, the condition of the runway should be assessed, and the friction coefficient measured.

ATPL Performance 30 October 2003 3-14
The table below, with associated descriptive terms, was developed from friction data collected in compacted snow and ice and should not be taken as absolute values applicable in all conditions. If the surface is affected by snow or ice and the braking action is reported as “good”, pilots should not expect to find conditions as good as on a clean dry runway (where the available friction may well be greater than that needed in any case). The value “good” is a comparative value and is intended to mean that aeroplanes should not experience directional control or braking difficulties especially when landing,
Measured Coefficient Estimated Braking Action Code 0.40 and above 0.39 to 0.36 0.35 to 0.30 0.29 to 0.26 0.25 and below
Good Medium to good Medium Medium to poor Poor
5 4 3 2 1
Surface friction information should be provided for each 1/3 of the runway, These measurements are made along two lines parallel to the runway. Each line being approximately 3 m from the centre line or at a distance at which most operations take place. Whenever dry snow, wet snow or slush is present on a runway, an assessment of mean depth over each 1/3 of the runway should be made to an accuracy of:
2 cm for dry snow 1 cm for wet snow 0.3 cm for slush
Water Equivalent Depth (WED) The WED is the depth of contaminant multiplied by its SG. This information is not normally available to flight crew. Limitations are normally calculated and placed in a table in the Operations Manual.
Contaminant Maximum Depth WED Very dry snow 80 mm < 28 mm Dry snow 60 mm < 21 mm Wet snow 15 mm 5.25 to 7.5 mm Slush 15 mm 7.5 to 12 mm Standing water 15 mm 15 mm
Hydroplaning Also known as aquaplaning. When an aeroplane lands than friction between the tyre and the surface is needed to allow the aircraft both directional control and effective retardation. Any surface contaminant, especially water, reduces the friction required. When the tyre friction is reduced to near zero then hydroplaning occurs.

ATPL Performance ©Atlantic Flight Training 3-15
The surface of the tyre adjacent to the ground is lifted from the surface by contaminant pressure until the tyre is completely riding on a contaminant film. Hydroplaning affects the aeroplane handling characteristics allowing it to:
Lose retardation Slip as if the aeroplane is on ice
Two types of hydroplaning are possible:
Dynamic hydroplaning Viscous hydroplaning
Dynamic Hydroplaning Dynamic hydroplaning occurs when standing water on a wet runway is not displaced from under the tyres fast enough to allow the tyre to make pavement contact over its total footprint area. The tyre rides up on a wedge of water and partial or total hydroplaning occurs. The tyre is no longer in contact with the runway surface area. It is possible that as the tyre breaks contact with the runway that the centre of pressure in the tyre footprint area could move forward. At this point, total spin-down could occur and the wheel stops rotating, which results in total loss of braking action. The speed at which this happens is called minimum total hydroplaning speed. For hydroplaning to occur:
The area must be flooded to a depth of the tyre tread plus the depth of the runway texture. Known as the critical depth.
The aeroplane must be travelling at or above a critical speed The critical speed is when the tyre speed is such that water is unable to escape from underneath the tyre. The speed at which hydroplaning occurs is calculated using two formulae:
Rotating Tyre V ρ (spin down) = 9√P where P is in pounds per square inch (psi) V ρ (spin down) = 34√P where P is in bar (1 bar = 14.5 psi)
Where: V ρ Hydroplaning speed in knots
If a surface other than water causes the hydroplaning then the answer must be divided by the specific gravity of the material.

ATPL Performance 30 October 2003 3-16
The tyre footprint affects an aeroplane’s hydroplaning characteristics:
Correct Inflation The tyre footprint remains the same for changes in AUW Under Inflation The footprint will increase because of the under-inflation. The hydroplaning will occur at a lower groundspeed than normal.
Variables that Affect Hydroplaning
Take-Off Because of the increase in speed as an aircraft takes-off contaminant will build up at the front of the tyre. This will lift the tyre clear of the surface. To stop the build up the contaminant depth must be less than critical for the length of the TORR. Landing Where the depth of contaminant is over the critical depth then landing should be delayed Hydroplaning will continue until:
The groundspeed falls below the critical speed, or The contaminant depth falls below the critical depth
Runway Surface If a runway is porous or is grooved then it will have better drainage and obviously there will be less chance of hydroplaning Wind Direction A strong crosswind will normally blow contaminant to the lee side of the runway. Poor drainage on the lee side may cause pooling. It is suggested that a crosswind limit for slippery runways be limited to 10 knots unless the flight manual specifies a figure. Where a runway has a camber then pooling may occur on the windward side.
Viscous Hydroplaning Viscous hydroplaning can cause complete loss of braking action at a lower speed if a wet runway is contaminated with a film of oil, dust, grease, rubber or the runway is smooth. The contamination combines with the water and creates a more viscous mixture and is thus more slippery. It should be noted that viscous hydroplaning can occur with a water depth less than the critical depth for dynamic hydroplaning, and skidding can occur at lower speeds. Combined Hydroplaning Normally hydroplaning is a combination of dynamic and viscous hydroplaning. Reverted Rubber Hydroplaning Rubber reversion hydroplaning is less known and is caused by the friction-generated heat that produces superheated steam at high pressure in the tyre footprint area. The high

ATPL Performance ©Atlantic Flight Training 3-17
temperature causes the rubber to revert to its uncured state and form a seal around the tyre area that traps the high-pressure steam. It is theorized that this condition would occur on damp runways or when touchdown occurs on an isolated damp spot of a dry runway, which results in no spin-up of the tyres and a reverted rubber skid. Runway Slope If a runway is sloped:
Downslope TORR and TODR are shortened
LDR increased Upslope TORR and TODR are increased LDR decreased
The runway slope is expressed as a percentage and is calculated by using the elevations at either end of the TORA.
Difference in threshold elevations X 100 = % TORA x 3.281

ATPL Performance 30 October 2003 3-18
Intentionally Left Blank

ATPL Performance ©Atlantic Flight Training 4-1
Chapter 4.
Basic Performance – Take-Off Introduction The take-off can be split into three distinct parts:
The take-off roll The transition to the climb The steady climb to a “screen height”
Screen Height The height of an imaginary screen which the aeroplane would just clear when taking off or landing in an unbanked attitude with landing gear extended.
This chapter looks at the general principles of the climb and the factors that need to be taken into account. Aerodynamic Forces The forces that affect the aircraft during the take-off are the same as those discussed in Chapter 2.
Thrust The engine thrust depends upon the type of engine being used:
Jet Engine The net thrust attained is the gross thrust minus the momentum drag. As the aeroplane accelerates the momentum drag increases and the thrust will reduce. As the speed increases the momentum drag is countered by “ram effect” as the aeroplane accelerates. For a jet engined aeroplane during take-off:
Lift
Thrust
Drag
Weight

ATPL Performance 30 October 2003 4-2
There is an initial decrease in net thrust As the speed increases the net thrust increases The overall effect is that there is a decrease in thrust during take-
off
Propeller For a fixed pitch propeller, the angle of attack decreases with forward speed and the thrust decreases. For a variable pitch propeller:
Maximum rpm is selected which sets the propeller in fully fine pitch. The angle of attack will decrease with the initial increase in forward speed causing an initial thrust decrease
As the speed increases the load on the propeller reduces and the constant speed unit will operate. The propeller pitch is increased to hold maximum rpm which reduces the rate at which the thrust decreases
Drag The drag that affects the aeroplane on take-off is a combination of:
Aerodynamic drag which is dependent on:
IAS Configuration
The drag will increase for increased flap setting For a given flap setting the drag increases by IAS2
Angle of attack
Wheel friction (drag) which is dependent on:
The load on the wheel
Initially the weight of the aeroplane The drag reducing as lift is produced
The runway surface resistance
Once the aeroplane is rotated then the induced drag will increase due to the increased angle of attack. Where an aeroplane is rotated earlier than VR then the drag is increased such that the take-off run required is increased.

ATPL Performance ©Atlantic Flight Training 4-3
Variables That Affect the Take-Off The following affect an aeroplane on take-off. Specific figures will be specified when the JAR Performance Class aeroplanes are discussed.
Weight Acceleration is calculated by the equation:
Force = Mass x Acceleration The greater the mass of an aeroplane the slower the acceleration and thus the longer the take-off run. The thrust of the aeroplane (force) is little changed so the greater mass must be offset by a decrease in the acceleration. A secondary effect of increased weight is one of increasing the friction on the wheels which will also suppress the acceleration. Increased weight:
Requires an increase in the lift required to balance the forces during the take-off run. To increase the lift increased airspeed is required which will increase the take-off run.
The increase in weight means an increase in the aeroplane stalling speed. For safety the aeroplane will use a higher lift-off speed which again increases the take-off run
Wind The affect of either a headwind or a tailwind can be quite marked on the take off distance.
Example A 30 knot headwind means that the aeroplanes relative speed is already 30 knots and the aeroplane has 30 knots less to achieve the lift off airspeed. Obviously this will decrease the take-off run A 30 knot tailwind means that the aeroplane has to accelerate to 30 knots before the relative airspeed is zero. To achieve the lift off speed will require a longer take off run
The headwind and tailwind also have an affect on the climb gradient:
A headwind increases the climb gradient A tailwind decreases the climb gradient
When calculating take-off distance the following is used to allow for variations in the wind:
50% a headwind is assumed

ATPL Performance 30 October 2003 4-4
150% of a tailwind is assumed When the wind is across the runway both the lateral and directional control are affected. This crosswind leads to the publication of crosswind limitations for aeroplanes. Runway Slope The slope of a runway affects the take-off distance:
Downslope The downslope will assist in the acceleration process and thus decrease the take-off distance Upslope The upslope will counter the accelerating force and will cause an increase in the take-off distance
Density Density is affected by:
Pressure Temperature Humidity
Density will decrease when there is an increase in the temperature and humidity and a decrease in the pressure (increase in altitude). Remember that pressure falls and temperature falls with an increase in altitude. This means that the density is decreased by the decrease in pressure but increased by the fall in temperature. Pressure is the dominant force so it is fair to say that with an increase in altitude the density of the air is reduced. Any decrease in density will obviously decrease the power output of an engine. Any lowering of the density will increase the take-off run. When aeroplanes operate at high altitude airfields and high temperatures then limits on take-off weight may apply. The WAT limits are normally produced in the aeroplane manual to allow a pilot easy calculation of the limitations. When the aeroplane lifts off the screen height has to be achieved which means that the aeroplane must have a minimum climb gradient. If the density reduces the power output then this will reduce the climb gradient. This may result in the take-off weight being reduced. TAS The take-off speeds are determined by reference to:
AUW Configuration Density
High temperature increases the TAS which also increases the groundspeed. Take-off calculations are with respect to EAS/CAS and to achieve these speeds with the

ATPL Performance ©Atlantic Flight Training 4-5
increased TAS means that the take-off run is increased. The initial climb is affected in a similar way; the lower density lowers the climb gradient. Groundspeed When low density situations occur the take-off run is increased, this means that a higher groundspeed is achieved which could mean that the aeroplane reaches the tyre limiting speed before lift off. Under these circumstances the TOW may be limited. Flap Setting The flap setting will affect the take-off run. The lower the flap angle the longer the take-off run required. The flap setting will also affect the climb gradient

ATPL Performance 30 October 2003 4-6
Intentionally Left Blank

ATPL Performance ©Atlantic Flight Training 5-1
Chapter 5.
Basic Performance – Climb Basic Aerodynamics An aircraft possesses a steady climb capability by converting propulsive energy in excess of that required to maintain steady level flight into potential energy. An aircraft can either be climbed steeply at a low airspeed, or be climbed at a higher airspeed at a shallower angle.
MAX ANGLEOF CLIMB
MAX RATEOF CLIMB
ALTITUDE GAINED INA GIVEN TIME
0 DISTANCE TRAVELLED IN A GIVEN TIME
BEST VERTICAL SPEED
BESTGRADIENT
STARTOF
CLIMB
If the airspeed is too low or too high, all of the power or thrust available will be needed to overcome the drag, thus reducing an aircraft's climb capability to zero. In a steady climb at a constant airspeed in a given period of time an aircraft can be climbed at:
Maximum Angle of Climb This is achieved when an aircraft gains the most altitude in the shortest horizontal distance covered, i.e. best gradient. This occurs when it is flown at a relatively low airspeed, and gives good ground obstacle clearance. Maximum Rate of Climb This is achieved when an aircraft gains the most altitude in the shortest time. This occurs when it is flown at a small angle of climb and a high airspeed.
Forces in a Straight Steady Climb When an aircraft climbs at a constant airspeed the forces acting on it are in equilibrium.

ATPL Performance 30 October 2003 5-2
COMPONENT OF WEIGHTALONG FLIGHT PATH
FLIGHTPATH
ANGLE OF CLIMB
COMPONENT OFWEIGHT AT 90°
TO FLIGHT PATH
DRAG (D)
LIFT (L)
THRUST (T)
TAS (V)
WEIGHT (W)
The angle between the flight path and the horizontal is known as the angle of climb (α). The weight is resolved into two components; one opposing the lift and the other acting in the same direction as drag The following relationships therefore exist: Thrust = Drag + component of weight opposing flight, or
T = D + W sin γ
Lift = component of weight acting perpendicular to the flight path or L = W cos γ
With increasing angles of climb the amount of lift required steadily decreases, whilst the thrust requirement increases.
FLIGHTPATH
LIFT
DRAG
THRUST
WEIGHT
FLIGHTPATH
THRUSTLIFT
DRAG
WEIGHT
In a steady climb thrust is always greater than drag, and lift is always less than weight.

ATPL Performance ©Atlantic Flight Training 5-3
Climb Speed The climb can be defined by using the following two speeds:
VX The maximum gradient of climb speed. VY The maximum rate of climb speed.
Maximum Angle of Climb Using the Drag/Thrust against speed graph, the maximum angle of climb is the point on the graph where the thrust and drag curves are furthest apart. Both propeller and jet graphs are shown because:
In the jet case the thrust is not dependent on speed In the propeller case the thrust curve varies with speed
VX is used up to the end of the take-off phase to the beginning of the climb phase. Once past this obstacle clearance phase a high rate of climb is preferred to the initial high angle of climb. Remember that VX will be close to the aeroplane stall speed. Maximum Rate of Climb Rate of climb is the height gained per unit of time. The maximum rate of climb will be determined by the amount of excess power available for the climb.
T D
T
D
Thrust/Drag Thrust/Drag
Speed

ATPL Performance 30 October 2003 5-4
Relation between Power and Drag Drag can be expressed as the Thrust required meaning that in level flight drag must be balanced by an equal amount of thrust. Power is the rate of doing work. The Power required for flight is expressed as the Thrust required multiplied by the true airspeed. By plotting the power required against TAS the minimum Drag speed can be found by plotting the tangent to the bottom of the curve. This line can be considered as the speed for minimum power to maintain level flight.
When the power curves for both the Jet Engine and the Piston Engine are combined with the power available curve then the maximum point of excess power can be found. Where the excess power is at its greatest is the point at which the aeroplane has the maximum rate of climb (VY).
VX VX Jet Engine Propeller
Power Required
TAS
Minimum Drag Speed

ATPL Performance ©Atlantic Flight Training 5-5
The rate of climb can be calculated using the following formula: (Power Available – Power Required) ÷ Weight VX and VY Rate of Climb can be plotted against IAS. Where the graph is at its maximum is the point of maximum rate of climb.
VX can be found by drawing the tangent to the climb curve.
Power Required
TAS
Power Required
TAS
Jet Piston
VY VY
VX VY
ROC
IAS

ATPL Performance 30 October 2003 5-6
VY is not used in general operations, as is usual in aeroplane performance a balance is taken between the aeroplane groundspeed and the rate of climb. Climb Performance The climb performance will be affected by certain variables:
Weight Any change in aeroplane weight will affect:
The climb gradient The rate of climb The drag
Both the climb gradient and rate of climb speeds increase as the weight increases. With an increase in weight more induced drag is produced. This will move the power required curve upwards. Because the power available stays the same this means that there is a reduction excess power which accordingly decreases the climb performance. Density Thrust will decrease as the density decreases. The higher the temperature the greater the decrease in air density. This will reduce lift and engine thrust. Where the aeroplane is climbing in a high temperature area (especially an inversion) then both the climb angle and rate of climb have to be reduced. With increasing altitude there is a reduction in thrust due to a decrease in density. As with high temperature areas there is a decrease in climb gradient. Wind Wind affects the distance taken to complete the climb. Most aeroplane performance charts are written in NAM (Nautical Air Miles) which need to be corrected for the headwind/tailwind to give NGM (Nautical Ground Miles). The angle of climb is not affected by a steady constant wind. The angle relative to the ground is affected by a headwind/tailwind because of the changes in the aeroplane groundspeed.
Headwind Increases the effective climb angle Tailwind Decreases the effective climb angle
Windshear Where there is a horizontal change in the headwind or tailwind then there will be a change in the rate of climb:
Increasing Headwind/Decreasing Tailwind Airspeed will momentarily increase and so will the rate of climb. Especially dangerous at high level when the airspeed could increase above MMO.

ATPL Performance ©Atlantic Flight Training 5-7
Decreasing Headwind/Increasing Tailwind The airspeed will momentarily decrease and so will the rate of climb
Configuration
Flaps Use of the flaps increases both lift and drag. Any lift increase does not influence the climb; an increase in drag reduces the climb performance. The advantage of using flap is the reduction in the stalling speed. Landing Gear The climb gradient decreases when the landing gear is in the down position.
Ceiling As an aeroplane climbs eventually the gradient and the rate of climb decrease to zero. This is known as the absolute ceiling. This will increase with decreasing aeroplane mass. This is not a practical altitude for the aeroplane to use so most flight manuals offer an aeroplane service ceiling.
Absolute Ceiling The pressure altitude where the rate of climb is zero Service Ceiling The pressure altitude where the rate of climb is a defined value:
Jet Engined Aeroplanes 500 fpm (2.5 m/s) Propeller Driven Aeroplanes 100 fpm (0.5 m/s)
Net Ceiling An artificial figure devised for aircraft safety reasons:
Jet Aircraft 750 fpm Propeller/Piston Aircraft 150 fpm

ATPL Performance 30 October 2003 5-8
Intentionally Left Blank

ATPL Performance ©Atlantic Flight Training 6-1
Chapter 6.
Basic Performance – Cruise Forces in the Cruise For constant speed level flight in the cruise the forces shown in the diagram below must equalise.
THRUST
LIFT
WEIGHT
DRAG
LIFT
LIFTUPLOAD
DOWNLOAD
In the diagram above:
Thrust = Drag
Lift = Weight ± Tailplane force The tailplane force will depend upon the position of the CG:
Forward CG The more forward the CG the greater the download force required for balance, requiring greater lift. This increase in lift required will increase the induced drag which in turn will require a thrust increase.
Variation of Drag The drag will vary with speed as shown in the diagram below. The minimum drag speed VIMD, where CL/CD is at a maximum, is plotted on the graph. When plotting drag against IAS the total drag does not change with pressure and temperature at a given mass. If the aeroplane mass is increased then the drag does increase and hence VIMD increases as well.

ATPL Performance 30 October 2003 6-2
Endurance/Range To begin the discussion on range and endurance it is best to give simple definitions initially:
Endurance The time that an aeroplane can fly on a set amount of fuel Range The distance that an aeroplane can fly on a set amount of fuel
Piston Engined Aeroplanes
Maximum Endurance With a piston powered aeroplane the fuel flow can be said to be proportional to the power setting. The lower the fuel flow required the lower the power setting. In the power/speed graph shown below A defines the maximum endurance power and speed – the point where the power is a minimum to hold level flight.
Drag
Speed
High Weight
Low Weight
VIMD

ATPL Performance ©Atlantic Flight Training 6-3
Maximum Range The maximum range speed is where the tangent from the origin touches the power/speed curve. This is where the ratio between the power and speed required is at a minimum – Point B. Note that, this point where the ratio between the power and speed is a minimum is also the minimum drag speed.
Jet Engined Aeroplanes For a jet powered aeroplane the fuel flow is proportional to the thrust setting.
Power
Speed
A B
Drag/Thrust
Speed
A B

ATPL Performance 30 October 2003 6-4
Maximum Endurance speed is the point where the thrust required to maintain level flight is a minimum – Point A. This means that unlike the piston powered aeroplane the maximum endurance speed is the same as the minimum drag speed. Point B represents the maximum range speed. When the maximum endurance and maximum range speeds are plotted then the following must be noted:
Even though the appearance of the graphs are the same visually:
Piston Aeroplanes The curve is plotted using power against speed Jet Aeroplanes Thrust versus speed is plotted
Range Range is expressed as the distance traveled with the fuel available. The term Specific Range is used and is normally expressed as a relationship between TAS and fuel flow.
In jet aeroplanes the fuel flow is dependent on the engine thrust In propeller aeroplanes the fuel flow is dependent on the engine power
Both are related by the term Specific Fuel Consumption (SFC). SFC can be calculated by the following:
Jet Aeroplanes TAS ÷ (SR x Thrust)
Propeller Aeroplanes TAS ÷ (SR x Power) For a jet aeroplane Thrust equals Drag and for a propeller aeroplane the power available must equal the power required. In real terms the SR depends upon the engine efficiency and the airframe efficiency. Best Range Speed Maximum range speed is where the tangent from the origin touches the Drag/Thrust against Speed curve for a jet aeroplane and Power against Speed curve for a propeller aeroplane. This occurs at:

ATPL Performance ©Atlantic Flight Training 6-5
1.32 VIMD for jet aeroplanes VIMD for propeller aeroplanes
This speed is not used in performance calculations as:
Speed stability is poor A higher speed will not give a great loss in the range Higher speeds give a better time profile
Factors Affecting Range The following affect the range of an aeroplane:
Wind Maximum range speed is affected by the change in groundspeed and the distance flown.
Headwind A higher maximum range speed is required. Thus the ground distance traveled will be less. Tailwind A lower maximum range speed is required. The ground distance traveled will be more.
Weight Increased weight increases the drag and power. The greater the thrust the greater the fuel flow required which will decrease the SR. Altitude
Jet Aeroplanes An increase in altitude will increase the range until the aeroplane reaches its optimum altitude. The increase in range with altitude happens because:
Increase in TAS with altitude Increase in engine efficiency with altitude
The range will then decrease because as the aeroplane flies above the optimum altitude the drag increases and the specific range is reduced because of the increasing effects of compressibility. As the aeroplane weight reduces so the optimum altitude increases. Propeller Aeroplanes Altitude does not affect the propeller driven aeroplane as much as the jet aeroplane. The TAS and the power required increase with altitude. This ensures that the ratio TAS/Power Required remains the same. The range is affected by any change of SFC with altitude.

ATPL Performance 30 October 2003 6-6
Temperature An increase in temperature will increase the TAS and reduce engine efficiency – both countering each other which means that there is little change in range for a change in temperature.
Endurance The time that an aeroplane can remain airborne on a given amount of fuel. Endurance is at a maximum when the fuel flow is at a minimum. Fuel flow depends upon:
Jet Aeroplanes Thrust and SFC Propeller Aeroplanes Power and SFC
Thrust and power are lowest when the drag and power required are least; VIMD and VIMP.
Factors Affecting Endurance The following affect endurance:
Weight The higher the weigh the higher the power required so endurance will decrease. Altitude
Jet Aeroplanes An increase in altitude does not affect the drag. SFC improves with increasing altitude and thus endurance improves. Above optimum altitude compressibility increases and the drag increases and endurance reduces. Propeller Aeroplanes As altitude increases, the power required increases but SFC will improve. The increase in power required will reduce the endurance, the SFC will improve it. The balancing out of these two effects means that the endurance is little affected.

ATPL Performance ©Atlantic Flight Training 7-1
Chapter 7.
Basic Performance – Descent Straight Steady Descent (Dive) When an aircraft is placed in a nose-down pitch attitude, and the thrust remains constant, the forces acting on the aircraft will change. This new attitude will cause a corresponding decrease in the angle of attack, and lift will momentarily become less than weight, causing the aircraft to begin the descent. A component of weight will act forward along the flight path, and together with the component of thrust, will cause the aircraft to accelerate. The engine is now doing less work compared with climbing and level flight, and to maintain a constant airspeed the thrust will need to be reduced, until the two components acting along the flight path oppose the drag.
DRAG
THRUST
LIFT
WEIGHT ANGLE OF GLIDE
COMPONENT OF WEIGHT ACTING ALONG FLIGHT PATH
γ
The forces can be resolved as follows: - Thrust = Drag – component of weight acting along flight path, or
T = D – W sin γ Lift = component of weight acting perpendicular to the flight path, or
L = W cos γ
This shows that in a straight steady descent lift is less than weight and thrust is less than drag.

ATPL Performance 30 October 2003 7-2
Steady Glide If the amount of power available is reduced to zero, the component of thrust will reduce to zero, and the drag force will act to decelerate the aircraft. This will lead to an overall reduction in lift, thus unbalancing the lift/weight couple and placing the aircraft in a nose-down pitch attitude - a glide. A component of weight will act forward along the flight path, and will oppose the drag.
LIFT
DRAG
WEIGHT
THRUST
LIFT
DRAG
WEIGHT
NO THRUST
DRAG
WEIGHT
LIFT
COMPONENTOF WEIGHTOPPOSING
DRAG
Forces in a Steady Glide
In a steady straight glide the aircraft will be moving at a constant indicated airspeed, with the engine producing no thrust, and the remaining aerodynamic forces, ie. lift, drag and weight, being in equilibrium.
DRAG
TOTAL REACTION
LIFT
WEIGHT ANGLE OF GLIDE
NO THRUSTCOMPONENT OF WEIGHTACTING ALONG FLIGHTPATH BALANCES DRAG

ATPL Performance ©Atlantic Flight Training 7-3
The angle between the flight path and the horizontal is known as the aircraft's angle of glide (θ). The aircraft's weight is balanced by the total reaction (resultant of lift and drag), and is resolved into two components. One component acts perpendicular to the flight path, and balances the lift, whilst the other acts along the flight path, and balances the drag. The forward component also determines the aircraft's forward airspeed. For an aircraft of given weight, any reduction in the angle of glide will result in a smaller component of weight acting forward along the flight path).
DRAG
TOTALREACTION
LIFT
WEIGHT
LOW LIFT/DRAGRATIO
DRAG
LIFT
TOTALREACTION
HIGH LIFT/DRAGRATIO
This will reduce the amount of drag required to maintain a steady glide, and the lift/drag ratio will increase. The shallowest glide is obtained when the drag is least for the required lift, i.e. best lift/drag ratio. The lift/drag ratio is therefore a measure of the aircraft's gliding efficiency or performance. The aircraft will glide furthest through the air, ie. best glide performance, when it is flown at an angle of attack and airspeed that gives the best lift/drag ratio.

ATPL Performance 30 October 2003 7-4
Glide Angle The minimum glide angle can be found by finding the point where the ratio between the power required and the speed is at a minimum – Point A on the diagram below. As with other power speed graphs the best glide angle is where a straight line from the origin is the tangent of the curve – Point B on the diagram below. This is also the point where the Lift/Drag Ratio is at its best.
The Effect of the Lift/Drag Ratio on Glide Performance Most aircraft are not fitted with an angle of attack indicator, so the airspeed is normally adjusted to correspond to that relating to the best lift/drag ratio, i.e. minimum drag speed (VIMD). This is possible because in a glide a similar, although not exactly the same, relationship exists between indicated airspeed and the angle of attack as that in level flight. This speed is found in the flight-operating manual and is based on an aircraft's all up weight (AUW). Furthermore since the minimum drag speed produces the best glide performance, flight at any other speed will reduce the lift/drag ratio, and consequently increase the angle of glide. This will reduce the aircraft's glide performance, and reduce the overall glide distance.
Power
Speed
A B

ATPL Performance ©Atlantic Flight Training 7-5
TOO SLOW
TOO FAST
70 KT
80 KT
55 KT
BEST L/D RATIOSPEED (VIMD) GIVESBEST GLIDE DISTANCE
The reduction in the lift/drag ratio at airspeeds above and below the minimum drag speed is due to; high induced drag at slow airspeeds, and high profile drag at high airspeeds. If the aircraft is gliding at the recommended airspeed for maximum glide distance, and it looks like it will not reach its designated landing point, the nose should not be raised, since the higher nose attitude will decrease the glide distance. The Effect of a Steady Wind on Glide Performance
A steady wind alters an aircraft's actual flight path and its effective gradient over the ground, thus altering its angle of glide.
ALTITUDETAILWINDNIL WIND
HEADWIND
GROUND
A tailwind will increase an aircraft's gliding distance over the ground, i.e. reduce the angle of glide, whilst a headwind will reduce the distance over the ground, i.e. increase the angle of glide. The time taken to reach the ground from a given start altitude in either case will remain the same, ie. glide endurance is unaffected by a steady wind. The Effect of Weight on Glide Performance
Any change in aircraft weight will require a similar change in lift and drag to maintain the best glide distance, ie. range, in a straight steady glide.

ATPL Performance 30 October 2003 7-6
RESULTANTLIFT
DRAG
RL
D
W
WEIGHT
The best lift/drag ratio will therefore remain unchanged, as will the angle of glide, provided that the airspeed is adjusted to maintain the optimum angle of attack. The glide distance is therefore unaffected by changes in aircraft weight, but the glide endurance will decrease with increasing weight, due to the higher indicated airspeed, and vice versa. Summary The following points summarise the glide:
Increased weight increases the forward speed of the aeroplane. The lift and drag are consequently increased and so the lift/drag ratio remains constant. Thus:
The glide angle remains constant The aeroplane will descend at a higher speed which increases the rate of
descent
If the aeroplane descends at a constant IAS: Both the gradient and pitch angle are constant
If the aeroplane descends at a constant Mach Number: IAS and TAS will increase The angle of attack will therefore decrease. The pitch angle and gradient of descent will increase
To keep a constant descent gradient: The angle of attack is decrease The pitch angle increase

ATPL Performance ©Atlantic Flight Training 8-1
Chapter 8.
Basic Performance – Landing Introduction The basic terms used in the landing have already been explained in Chapter 3. This chapter describes the approach and landing in a practical manner and will introduce factors that affect the aeroplane. Approach The approach is the flight phase where the aeroplane is brought from the descent into the landing configuration. The change from the descent phase to the approach phase is a gradual process where the speed is reduced gradually. Approach Speeds All approach speeds are related to the aeroplane stall speed. The speeds are always factored so that the aeroplane can make normal turns without the risk of entering the stall buffet.
VS1 The stalling speed with the aeroplane in a set configuration under consideration
Initial Approach Speed Usually between 1.4VS1 to1.5VS1 Final Approach Speed 1.3VS1 + 5 knots Threshold Speed 1.3VS1
During the approach the speeds will be gradually reduced to the above speeds. Remember that all aeroplanes have these speeds listed in the flight manual. Flap Settings The flap setting will depend upon the type of aeroplane. Light aeroplanes usually have simple flaps whereas the heavy public transport aeroplane may have both flap and slat settings. The approach is usually flown at low power settings. Using flap settings during the approach reduces the drag induced. Starting with low settings during the initial approach, gradually increasing as the aeroplane approaches the threshold. The type of engine affects the flap setting due to engine run-up times:

ATPL Performance 30 October 2003 8-2
Propeller Aeroplane Propeller aeroplanes respond quickly to the application of power. Where a go-around is initiated the high power required can be achieved quickly. This means that small flap settings can be maintained up to the reduction to threshold speed. Jet Aeroplanes The jet engine takes time to “spool up” . With Jet aeroplanes the flap setting is usually increased earlier in the approach to ensure that the engine is at a high thrust setting ensuring that the “spool up” time is short if a go around is initiated.
Wind Effect The approach is affected by the following factors:
Headwind Where the aeroplane is flying a fixed glidepath approach the groundspeed is less than the TAS. The power is higher than the still air case and results in a lower than normal descent rate. Tailwind Where the aeroplane is flying a fixed glidepath approach the groundspeed is more than the TAS. The power is lower than the still air case and results in a higher than normal descent rate.
Windshear As in the climb windshear has an immediate effect on the aeroplane.
Headwind Reduces Where the aeroplane flies into a rapidly reducing headwind it will experience a rapid decrease in airspeed. This rapid decrease means that the aeroplane will drop below the glidepath. Example An aeroplane flying an approach at 100 knots IAS in a headwind of 50 knots experiences windshear that reduces the headwind to 20 knots. The aeroplane will experience an immediate reduction in IAS to 70 knots and will drop below the required glidepath.
20 knots
50 knots
100 kts IAS
70 knots IAS

ATPL Performance ©Atlantic Flight Training 8-3
Strong windshear can be dangerous:
The aeroplane may undershoot The airspeed can be reduced to below the stall
Headwind Increases Where the aeroplane flies into a rapidly increasing headwind it will experience a rapid increase in airspeed. This rapid increase means that the aeroplane will fly above the glidepath. Example An aeroplane flying an approach at 100 knots IAS in a headwind of 10 knots experiences windshear that increases the headwind to 40 knots. The aeroplane will experience an immediate increase in IAS to 130 knots and will fly above the required glidepath.
Landing Distance The landing distance can be defined as the distance necessary for an aeroplane in the landing configuration to land and come to a complete stop from a point 50 ft above the landing surface. The CAS is assumed to be 1.3VS to the 50 foot screen height. The landing distance is calculated for a hard surface runway that is:
Level Smooth Dry
Retardation is assumed to be by normal braking only. Only braking devices that do not rely on engine power can be used, items such as:
Lift dump Spoilers etc
40 knots
10 knots
100 kts IAS
130 knots IAS

ATPL Performance 30 October 2003 8-4
The landing distance is also factored according to the wind:
50% of the headwind is used 150% of the tailwind
Landing Speed Where the threshold speed is not achieved there will be a change in the landing distance. Landing at a speed in excess of the threshold speed will increase the landing distance required. Weight The heavier the aeroplane the higher the approach and threshold speed. The higher weight will mean that the aeroplane has more momentum which will in turn increase the landing distance. Density Where there is a change in density so there will be a difference between TAS and IAS.
High Density The TAS will be close to the IAS and the landing distance will be shorter Low Density TAS will be higher than IAS and the landing distance longer

ATPL Performance ©Atlantic Flight Training 9-1
Chapter 9.
JAR Requirements - General Introduction This chapter introduces the Classes and other definitions of aircraft. The more specific details required of each Class will be discussed in later Chapters. JAR-OPS 1.470 Applicability
Performance Class A Multi-engine aeroplanes powered by:
Turbopropeller engines with a maximum approved passenger seating configuration of more than 9 or a maximum take-off mass exceeding 5700 kg, and
All multi-engine turbojet powered aeroplanes are operated in accordance with JAR-OPS, Subpart G – Performance Class A
Performance Class B Propeller driven aeroplanes with a maximum approved passenger seating configuration of 9 or less, and a maximum take-off mass of 5700 kg or less are operated in accordance with JAR-OPS, Subpart H – Performance Class B
Performance Class C Aeroplanes powered by reciprocating engines (piston engines) with a maximum approved passenger seating configuration of more than 9 or a maximum take-off mass exceeding 5700 kg are operated in accordance with Subpart I – Performance Class C Piston engine aircraft that would otherwise be in Class A
JAR-OPS 1.475 General An operator has to ensure that the mass of the aeroplane:
At the start of the take-off or, in the event of in-flight replanning At the point from which the revised operational flight plan applies,
is not greater than the mass required by the appropriate Subpart. Allowance for expected reductions in mass as the flight proceeds, and for such fuel jettisoning are made. Approved Performance Data must be held in the Aeroplane Flight Manual compiled by the operator. This is used to determine the aeroplane’s compliance with the requirements of the

ATPL Performance 30 October 2003 9-2
appropriate Subpart. This can be supplemented as necessary with other data acceptable to the Authority. Account must be taken of aeroplane configuration, environmental conditions and the operation of systems which have an adverse effect on performance. For performance purposes, a damp runway, other than a grass runway, may be considered to be dry. JAR-OPS 1.475 General Terms used by JAR-OPS, Subparts F, G, H, I and J, and not defined in JAR-1, have the following meaning:
Accelerate-stop distance available (ASDA) The length of the take-off run available plus the length of stopway, if such stopway is declared available by the appropriate Authority and is capable of bearing the mass of the aeroplane under the prevailing operating conditions.
Contaminated runway A runway is considered to be contaminated when more than 25% of the runway surface area (whether in isolated areas or not) within the required length and width being used is covered by the following:
Surface water more than 3 mm (0·125 in) deep, or by slush, or loose
snow, equivalent to more than 3 mm (0·125 in) of water; Snow which has been compressed into a solid mass which resists further
compression and will hold together or break into lumps if picked up (compacted snow); or
Ice, including wet ice.
Damp runway A runway is considered damp when the surface is not dry, but when the moisture on it does not give it a shiny appearance. Dry runway A dry runway is one which is neither wet nor contaminated, and includes those paved runways which have been specially prepared with grooves or porous pavement and maintained to retain 'effectively dry' braking action even when moisture is present.
Landing distance available (LDA) The length of the runway which is declared available by the appropriate Authority and suitable for the ground run of an aeroplane landing.
Maximum approved passenger seating configuration The maximum passenger seating capacity of an individual aeroplane, excluding pilot seats or flight deck seats and cabin crew seats as applicable, used by the operator, approved by the Authority and specified in the Operations Manual.

ATPL Performance ©Atlantic Flight Training 9-3
Take-off distance available (TODA) The length of the take-off run available plus the length of the clearway available.
Take-off mass The take-off mass of the aeroplane shall be taken to be its mass, including everything and everyone carried at the commencement of the take-off run. Take-off run available (TORA) The length of runway which is declared available by the appropriate Authority and suitable for the ground run of an aeroplane taking off. Wet runway A runway is considered wet when the runway surface is covered with water, or equivalent, less than specified in subparagraph (a)(2) above or when there is sufficient moisture on the runway surface to cause it to appear reflective, but without significant areas of standing water.
Take-Off Run Required (TORR) TORR is defined when there is a clearway and is the longer of the following two distances. Where no clearway is used then TORR will not be the limiting factor.
Engine Failure From the start of the ground roll to a point equidistant between the lift-off point and the point where the aircraft is 35 ft above the ground, where the engine fails at VEF.
TORA Clearway
V1 VEF VR VLOF
Take-Off Run (Includes ½ Airborne Distance)
Airborne Distance
½ Airborne Distance
½ Airborne Distance

ATPL Performance 30 October 2003 9-4
All Engines Operating 115% of the distance between the start of the ground roll to the point equidistant between the lift-off point and where the aircraft is 35 ft above the ground.
Take-Off Distance Required (TODR) TODR is defined as the greater of the distances defined below:
Engine Failure The distance from the start of the ground roll to the point where the aircraft reaches a height of 35 ft and V2 where the engine has failed at VEF.
Where a clearway is available then at least ½ the airborne distance between the lift-off point and the 35 ft/V2 point has to be within TORA. No matter how long the clearway, not all of it can be made available for achieving the 35 ft height point.
V1 VR VLOF V2 /35ft
TORA
Minimum 115% TOR
TOR (including½ Airborne Distance)
All Engines TOD to 35 ft
½ Airborne Distance
Clearway
V1 VR VLOF V2 /35ft
TORA
Minimum 115% TOR
TOR (including½ Airborne Distance)
TOD to 35 ft With Engine Failure at Some Point Along the Run
½ Airborne Distance
Clearway

ATPL Performance ©Atlantic Flight Training 9-5
Where there is no clearway the TODR must be within the runway length. In this case TODR is more limiting than TORR. All Engines Operating 115% of the distance from the start of the ground roll to the point where the aircraft reaches a height of 35 ft above the ground and VR with all engines operating.
The TOD can vary dependent on the number of engines an aircraft has:
Four Engine Aircraft The all engines operating case is usually the longer Two Engine Aircraft The engine failure case is usually the longer
Accelerate Stop Distance (ASD) The ASD required is the greater of the two distances defined below:
Engine Failure The aircraft accelerates with all engines operating from the brake release point until the critical engine fails (VEF), then:
The aircraft continues to accelerate until V1. The time interval between V1 and VEF is called the Recognition Time and is approximately 2 seconds.
The aircraft will continue to accelerate for another 2 seconds before:
The engines are throttled back, and The brakes are applied
TODA
Minimum 1.5 x All Engines TOD
V1 VR VLOF V2/35 ft
Recognition Time Decision Time
Brake Release
Full Stop
Accelerate Stop Distance Required
VEF V1

ATPL Performance 30 October 2003 9-6
This is the Decision Time
The aircraft is braked to a full stop. The distance between the Brake Release point and the Full Stop Point is the Accelerate Stop Distance Required.
All Engines Operating The aircraft accelerates with all engines operating until 2 seconds after V1.
After this 2 second delay the engines are throttled back and the aircraft braked to a full stop. The distance between the Brake Release point and the Full Stop Point is the Accelerate Stop Distance Required.
The differences between the two cases are:
In the Engine Failure case the distance to V1 is longer when the critical engine has failed.
In the All Engines Operating case:
The distance covered by the 2 seconds after V1 is longer, and The speed of the aircraft will be higher than in the Engine Failure case
The longer distance can be found by trials and this is taken as the Accelerate Stop Distance Required. To assist in the calculation the following assumptions are allowed:
Means other than wheel brakes may be used provided that they are safe and reliable
Consistent results must be obtained under normal operating conditions Exceptional piloting skills are not required to control the aircraft
Surprisingly, thrust reversers are not found to satisfy the other means of braking requirements. In all approved flight manuals, the Accelerate Stop Distances calculated are not based on the use of thrust reversers.
2 Second Delay V1
Accelerate Stop Distance Required
Brake Release
Full Stop

ATPL Performance ©Atlantic Flight Training 9-7
Aircraft Rotation The calculation of both TORR and TODA assume that the aircraft is rotated at the correct speed. Early and late rotation changes the TODR data as shown in the table below. Rotate Early Rotate Correct Rotate Late Rotate Too Slow TODR Increase TODR Increase TODR Increase Rotate Correctly TODR Increase Minimum TODR TODR Increase Rotate Too Fast TODR Increase TODR Increase TODR Increase If the aircraft is rotated early:
Additional induced drag is induced which, Causes a reduction in acceleration and increases the ground run The lift-off speed will be lower than normal which gives the aircraft less climb
ability If the aircraft is rotated late the ground run is increased but the climb ability is good. When rotation is made early or late the TOR and TODR are increased. Rotating early is the worst case scenario because:
The ground run increases The climb gradient decreases
Where an aircraft is rotated too slowly to the correct angle then the TODR will increase. Rotating too quickly increases the profile drag resulting in an increase in TODR. Margins are always built into performance calculations. The TOD with one engine failed using a rotation speed 5 knots below the correct speed must not exceed the corresponding TOD using the correct rotation speed. Remember that V2 must be achieved within the required TOD. V2 is the minimum speed that gives the aircraft the required climb ability when one engine becomes inoperative. Balanced Field Operations V1 Range The decision speed, V1, is selected within a speed range which is between:
VMCG Minimum control speed on the ground, and VR Rotation speed

ATPL Performance 30 October 2003 9-8
The length of the range between VMCG and VR depends on how large the take-off mass is with respect to the runway limited take-off mass. The V1 selected is the highest speed at which the take-off may be aborted in case of an engine failure. Where an engine failure is recognised above V1 the take-off must be continued. Where V1 has a low value then the ASD will be low.
This is because braking will be started at a relatively low speed. Less distance is needed to accelerate to V1 which in turn gives the relatively short ASD. During braking, less kinetic energy has to be dissipated which will also aid in giving a shorter braking distance. Low V1 values give a relatively long TOD because the acceleration from V1 to VR has to be carried out with one engine failed. VR is fixed at a given aircraft mass and therefore the larger the speed interval between V1 and VR the longer the distance needed for the aircraft acceleration. Balanced Take-Off Field Length A mass increase increases both TODR and ASDR. The maximum take-off mass for any given runway length is calculated by selecting a V1 so that TODA and ASDA are the same. Where TODR and ASDR are the same then we have a Balanced Field Length Take-Off. The balanced field length take-off method is used as it allows the highest take-off mass for the available runway.
VMCG V1 VR
V1 VR
Accelerate Stop Distance

ATPL Performance ©Atlantic Flight Training 9-9
Contaminated and Wet Runways Regulations and Definitions JAR 25 requires that:
The approved flight manual contains information regarding the field length required for take-off. The data has to be based on take-off data from a dry hard surfaced runway.
The operator has to supply the documentation which shows how to correct the approved flight manual for other runway conditions such as wet runways or runways covered with ice or snow.
In the UK regulations require the manufacturer to provide guidance information for the operator to enable the calculations to be made.
The manufacturer is required to provide guidance information concerning take-off from wet and contaminated runways
JAR 25 contains advisory material to help the manufacturer present the material The main distinction made in JAR 25 is that between wet and contaminated runways:
Wet Runway A wet runway is a runway well soaked with water, but without significant areas of standing water
Required Runway
V1
ASD
TOD
TOD<ASD TOD>ASD TOD = ASD
V1<V1B V1B V1>V1B

ATPL Performance 30 October 2003 9-10
Contaminated Runway A contaminated runway is where more than 25% of the runway surface area, within the required length and width being used is covered by:
Surface water more than 3 mm deep, or loose snow or by slush equivalent to more than 3 mm of water
Snow compressed into a solid mass which resists further compression and will hold together or break into lumps if picked up
Ice, including wet ice, causing a low braking action Wet Runways Calculation of the field lengths for take-off from wet runways are based on the following data:
VSTOP Defined as the highest V1 from which the aircraft can be stopped within the ASDA.
VGO Defined as the lowest V1 from which a continued take-off is possible within
the TODA.
Where an engine failure occurs between VSTOP and VGO then the speed will be:
Too high for the take-off to be aborted and the aircraft stopped before the end of the runway
Too low for a continued take-off for the aircraft to reach 35 ft at the runway end Where V1 and VSTOP are the same, this leads to a longer TOD for a given mass. There is a possibility of compensating for this by reducing the required 35 ft screen height to 15 ft at the end of the available TOD. For a wet runway some safety margins in the TOD are reduced or even sacrificed in order to avoid large reductions in take-off mass. For an aborted take-off the margins are not reduced. The aircraft will still stop on the remaining runway should a take-off be rejected at V1, a speed designated as VWET. If the screen height is lowered to 15 ft for a wet runway it is possible that the allowable take-off mass may be higher than that for a dry runway. JAR states that the maximum allowable take-off mass be that calculated for a dry runway. In addition, the All Engines Take-Off Distance must still meet the requirements for a dry runway.
1.15 x TOD to 35 ft The required TOD is the longer of:
The one engine inoperative wet runway TOD, and

ATPL Performance ©Atlantic Flight Training 9-11
All engines dry runway TOD Contaminated Runways Where an aircraft takes-off from a contaminated runway there will be a reduction in the safety margins. Because of this, take-off from a contaminated runway should be avoided if at all possible. Contamination can cause:
Reduced braking friction Increased rolling resistance Risk of aquaplaning/hydroplaning where there is standing water
The operator has to develop data for operations from wet and contaminated runways. The JAR requirements do not require specific flight testing to determine take-off data. Guidance material is published to enable the necessary calculations. Optimum Take-Off When the optimum speed and flap setting are chosen for take-off then the maximum take-off mass for a given runway is increased. For this given mass the aircraft’s take-off performance in the all engines and one engine inoperative condition will also improve.
Optimum Speed Optimum speed use gives the following performance improvements:
Higher TOM, or Better climb gradient when climb limited TOM or obstacle limited TOM is
below runway limited mass
To improve climb performance a higher V2 and consequently a higher V2/VS ratio is selected in order to obtain more excess thrust. The higher V2 is obtained by higher acceleration. The runway limited mass must be reduced in order to achieve this. The optimum V2/VS ratio is the value which gives a runway mass equal to the climb requirement mass or obstacle mass. Optimum Flap Optimum flap setting also optimises the take-off performance. The importance of the optimum flap setting is shown in some modern aircraft where the setting is accurate to 1/10 th of a degree. This is achievable over the whole range available. Low flap setting gives excess thrust and a better climb performance. There is a reduction in:

ATPL Performance 30 October 2003 9-12
Runway performance, and Performance versus close in obstacles
The optimum flap setting is where the two limiting TOM curves meet. Where the optimum flap is used the V2/VS ratio is usually left constant.
Reduced Take-Off Thrust In most cases, where an aircraft has an engine failure on take-off the performance is much better than that required. Where the actual TOM is lower than the performance limited TOM derated or reduced take-off thrust can be used. This helps in saving engine life. The preferred method of calculation is to use the assumed temperature method. Assumed Temperature Method The assumed temperature is obtained by calculating the limiting temperature where:
The actual TOM would use all of TODA (FLL) The aircraft would be limited by climb requirements (WAT) at actual TOW Maximum permitted thrust reduction occurs
The lowest of the three values is taken as the assumed temperature. This temperature is then used to calculate the thrust setting to be used for take-off. Thrust reduction is limited top 25% of the maximum take-off thrust. Where one engine fails after take-off, the one engine performance requirements must be satisfied. Go-around thrust can always be selected to give a better one engine performance. Flexible take-off thrust is allowed where runway mass limitation tables are available for the runway in use. The assumed temperature method is a reduced thrust method. For this reason it must not be used when the runway is contaminated. The runway must not be:
Contaminated by snow, slush standing water or ice De-icing or anti icing fluids must not have been used Airframe anti-ice must not be in use All EPR gauges must be operative
Noise Abatement ICAO Document 8168 PANS-OPS details the information required for departure and approach procedures regarding noise abatement. Aircraft are noisy and in the modern era where an airport is close to a built-up area then procedures are designed to reduce the noise as much as possible. Where special departure procedures are designed then it is possible that the TOM may be limited in order to achieve the requirements of the two noise abatement procedures. Two procedures are outlined below. Note that both procedures are not to be initiated at less than 800 ft above aerodrome level

ATPL Performance ©Atlantic Flight Training 9-13
Noise abatement procedures in the form of reduced power take-off should not be required in adverse operating conditions such as:
If the runway surface conditions are adversely affected (eg snow, slush, ice or other contaminants)
When the horizontal visibility is less than 1.9 km (1 nm) When the crosswind component, including gusts, exceeds 15 kt When the tailwind component, including gusts, exceeds 5 kt When wind shear has been reported or forecast, or Thunderstorms are expected to affect the approach or departure
Noise Abatement Departure Procedure 1 (NADP 1) This procedure is intended to provide noise reduction for noise sensitive areas in close proximity to the departure end of the runway. The procedure involves a power reduction at or above the prescribed minimum altitude and the delay of flap/slat retraction until the prescribed maximum altitude is attained.
The initial climbing speed to the noise abatement initiation point is not less than V2 + 10 knots
When at or above 800 ft above aerodrome elevation the engine power/thrust is adjusted in accordance with the noise abatement schedule in the aircraft operating manual
800 ft
3000 ft
Take –off Thrust V2 + 10 to 20 kt (or V2 + 20 to 40 kmh)
Initiate power reduction at or above 800 ft
Climb at V2 + 10 to 20kt Maintain reduced power
Maintain flaps/slats in the take-off configuration
Maintain positive rate of climb Accelerate smoothly to en-route climb speed At no more than 3000 ft retract flaps/slats on
schedule

ATPL Performance 30 October 2003 9-14
A climb speed of V2 plus 10 to 20 knots is maintained with the flaps/slats in the take-off position
At no more than 3000 ft above aerodrome elevation while maintaining a positive rate of climb the aircraft is accelerated and the flaps/slats retracted
At 3000 ft above aerodrome elevation accelerate to en-route climb speed Noise Abatement Departure Procedure 2 (NADP 2) This procedure is designed to alleviate noise distant from the aerodrome. The procedure involves the initiation of the flap/slat retraction on reaching the minimum prescribed altitude. The flaps/slats are to be retracted on schedule while a positive rate of climb is maintained. Power reduction is performed with:
The first flap/slat retraction, or When the zero flap/slat configuration is attained
At the prescribed altitude the transition to normal en-route climb procedures is made.
The initial climbing speed to the noise abatement initiation point is V2 + 10 to 20 knots
On reaching 800 ft above aerodrome elevation the body angle/angle of pitch is decreased while still maintaining a positive rate of climb. The aircraft is accelerated to VZF and:
Power is reduced with the initiation of the first flap/slat retraction, or Power is reduced after flap/slat retraction
A positive rate of climb is maintained and the aircraft is accelerated to a climb speed of VZF plus 10 to 20 knots to 3000 ft above aerodrome elevation
At 3000 ft the transition is made to normal en-route climb speed
(or V2 + 20 to 40 kmh)
800 ft
3000 ft
Take –off Thrust V2 + 10 to 20 kt
On reaching 3000 ft transition smoothly
to en-route climb speed
Not before 800 ft with a positive rate of climb accelerate to VZF and reduce power with the initiation of the first flap/slat
retraction or
When flaps/slats are retracted with a positive rate of climb reduce power and climb at VZF + 10 to 20 knots

ATPL Performance ©Atlantic Flight Training 9-15
Best Rate of Climb In the case of an engine failure let us assume that the power available has been reduced by 50% yet the power required remains the same, as shown in the diagram below. As can be seen the excess power is reduced dramatically.
Best rate of climb is now referred to the Best Single Engine Rate of Climb, VYSE . For a JAR 23 aircraft this speed is marked with a blue line on the ASI. This is then referred to as the Blue Line Speed. In summary:
The maximum rate of climb will be reduced The best single engine angle of climb, VXSE will increase yet the corresponding
rate of climb will be less than the maximum rate of climb. Weight Effect on Optimum and Service Ceiling Where there is a high gross mass there will be a decrease in rate of climb which will result in a lower absolute and service ceiling. With jet aircraft the initial gross mass is high (because of the fuel required) and hence initial cruising levels are low. When fuel is consumed the gross mass decreases and a higher altitude becomes available. This allows the aircraft to step climb. The maximum cruise level can be calculated from graphs provided in the aircraft manual such as the one produced below.
VY
VYSE
2 Engine 1 Engine
Speed
Power

ATPL Performance 30 October 2003 9-16
Buffet Onset Speed Where a jet aircraft operates at a high altitude the speed range is restricted by:
Performance factors Aerodynamic performance
With increasing altitude the:
Indicated stall speed increases slowly Buffet onset speed increases slowly
This means that the minimum speed will increase with altitude. At high TAS and high altitude the resultant Mach effects make the boundary layer more turbulent on parts of the aircraft. This is called high speed buffet and indicates that the pilot will have control problems if the speed is increased further. IAS for the high speed buffet onset decreases as the altitude and weight increases. The low speed buffet onset increases and the high speed buffet onset decreases with increasing altitude. This results in the available speed range becoming narrower. At a certain

ATPL Performance ©Atlantic Flight Training 9-17
altitude and weight the two speeds will be the same. This gives rise to the term “Coffin Corner”, where the speed is both too high and too low at the same time. This situation can occur during manoeuvres where the load factor is increased giving the same result as an increase in Mass.
Example A 40° turn in a 15 ton aircraft equals level flight in the same aircraft with a gross mass of 19.5 tons.
The associated 1.3 G load factor (15 x 1.3 = 19.5) is adopted as a manoeuvring safety factor when cruise flight level is selected. This allows the aircraft a bank angle of 40° before stalling. Buffet Onset Boundary Chart The chart on the following page is particular to the type of aircraft. The relationship is shown between:
Altitude Load Factor Cruise data Weight Mach Number IAS
The chart can be used to find:
The manoeuvre margin in terms of load factor and bank angle The low and high speed buffet for 1G flight.
Example Given the following, calculate the manoeuvre margin and the high
and low speed buffet speeds:
Airspeed M0.72 Flight Level FL 350 CG 10% MAC Gross Mass 50 000 kg

ATPL Performance 30 October 2003 9-18

ATPL Performance ©Atlantic Flight Training 9-19
Manoeuvre margin
STEP 1 Enter the chart at Point A with an airspeed of M0.72. STEP 2 Draw a line vertically until it intersects the flight level curve
for 35 000 – Point B STEP 3 From Point B draw a horizontal line to intersect the CG %
MAC reference line – Point C STEP 4 Draw a line to the 10% MAC point paralleling the slope of the
reference lines given – Point D STEP 5 Draw a horizontal line from Point D until it intersects the
gross weight curves at 50 000 kg – Point E STEP 6 Draw a line vertically down to intersect the load factor and
bank angle scale to determine the values for the initial buffet.
Bank Angle 47° Load Factor 1.47G
High and low speed buffet speeds
STEP 1 Enter the chart at the 1G position STEP 2 Draw a line vertically to the 50 000 kg gross weight curve –
Point F STEP 3 From Point F a horizontal line is drawn to the 10% CG
position. The reverse process is followed to that in the first calculation. The slope lines are back tracked to the CG reference line.
STEP 4 Draw a horizontal line to cut the 35 000 ft reference line to
cut it in two places: Point G and Point H
STEP 5 Draw vertical lines to read off the higher and lower speeds
which designate the buffet boundary: High Speed Buffet Boundary 0.814M Low Speed Buffet Boundary 178 kts (0.54M)

ATPL Performance 30 October 2003 9-20
Maximum Altitude The maximum altitude is defined as that altitude where the selected speed can be maintained in level flight at Maximum Cruise Thrust. The graphs provided in the aircraft manual can also be used to find the maximum altitude regardless of the safety 1.3G buffet onset limit. Optimum Altitude – Jet Aircraft For a given speed regime when the specific range is at a maximum the jet aircraft will operate best at an altitude termed Optimum Altitude. The optimum altitude will increase as the mass decreases and is generally accepted to be independent of speed and temperature. The specific range – optimum altitude is almost identical to the optimum altitude for minimum direct operating cost. Rough Air (Turbulence) Speed Where severe turbulence is encountered it is possible that the aircraft may:
Overstress, or Stall
The speed is adjusted to the recommended rough air speed VB. This is a best compromise speed allowing for the structural strength and stall speed. For JAR certification a gust intensity value for the rough air speed is calculated. The minimum VB is chosen as the intersection between this line and the stall curve as shown in the diagram below. Maximum VB is the intersection between the stall curve and the maximum load factor.
When flown at VB the aircraft will not stall if exposed to turbulence up to the certified gust intensity – in the case above 66 fps. It will not exceed maximum load factor if exposed to a more severe gust than that certified as the aircraft will stall first.
n
2.5
Gust Intensity Value = 66fps
IAS
VB VA

ATPL Performance ©Atlantic Flight Training 9-21
For aircraft below 5700 kg a specific rough air speed is not always specified. The maximum manoeuvring airspeed VA or a slightly lower speed should then be considered when encountering severe turbulence. Terrain Clearance for Performance A Aircraft For transport category aircraft the engine out service ceiling is defined as the altitude where the aircraft is capable of a certain climb gradient with the remaining engines at maximum continuous thrust. The climb gradient depends on the total number of engines and number of engines out:
2 Engine Aircraft Climb Gradient 1.1% 3 Engine Aircraft Climb Gradient 1.4% 4 Engine Aircraft Climb Gradient 1.6%
During a flight, the engine out service ceiling must be at least 1000 ft above all obstacles within 5 nm either side of the intended route. The navigational accuracy must be within the 95% containment level.
Note: Reducing mass by fuel dumping is not allowed in the calculation of service ceiling
Service Ceiling The service ceiling graph is used to check for any possible limitations due to the service ceiling requirements. Maximum TOM must not be higher than the maximum mass obtained from the table plus the fuel burned from take-off to the actual point en-route.
Example Using the graph on the next page. Given: Terrain Elevation 10 500 ft Service Ceiling Must be at least 11 500 ft OAT +4° (ISA +12°) The maximum gross mass, normal bleed conditions is 17.8 tons With engine and airframe anti-ice it is 14.85 tons

ATPL Performance 30 October 2003 9-22
Drift Down Procedures The use of Drift Down is an alternative method to the service ceiling requirement. Drift down procedure means that the aircraft enters terrain at an altitude high enough to clear the terrain on track to the nearest alternate aerodrome in the case of drift down resulting from engine failure. The drift down path used in the calculations must at each point be based on a descent gradient equal to the actual gradient minus the required service ceiling gradients. This is called the net drift down. The vertical clearance between the terrain and the net drift down path must be at least 2000 ft during descent. The net drift down path is used only for calculation before take-off. In the case of an engine failure the aircraft will follow a higher path called actual drift down.

ATPL Performance ©Atlantic Flight Training 9-23
The service ceiling at the alternate aerodrome used in the drift down calculation must be at least equal to the airport elevation plus 1500 ft.
In drift down calculation fuel dumping may be taken into account. Enough fuel must remain on board to reach the nearest aerodrome meeting the weather requirements as an alternate. The critical points or points for starting drift down must be given as a pre-determined point (PDP). The PDP must be calculated with a margin of:
5 minutes navigation error unless the exact position can be determined by an aid such as DME
The drift down path is based on 95% wind regularity and a temperature of ISA +15° C
Minimum 2000 ft
Minimum Altitude for Entering Terrain
One Engine Out Service Ceiling
Minimum Altitude for Entering Terrain
One Engine Out Service Ceiling
Net Drift Down Path
Alternate Aerodrome
Minimum 1500 ft

ATPL Performance 30 October 2003 9-24
En-Route Regulations
Three of Four Engined Aircraft To fly a route a 3 or 4 engined aircraft must be capable of losing an engine and still be capable of maintaining the necessary vertical clearance from obstacles. The aircraft must also be capable of maintaining:
Level flight 1500 ft above the airfield, and Of maintaining level flight for another 15 minutes
The aircraft must also be able to suffer the loss of another engine and still maintain the necessary obstacle clearance if the aircraft is more than 90 minutes flying time at the all engines operating long range cruise speed from a suitable airfield. This is also known as the “over water speed”. A flight of 90 minutes at the over water speed is approximately the distance that the aircraft would cover in 2 hours at the reduced TAS after an engine failure. This ensures that the incident probability is maintained at 10-6. An aircraft with an over water speed of 500 kts not having an acceptable 2 engine inoperative performance must remain within 750 nm of the nearest suitable aerodrome. Twin Engined Aircraft This group of Public Transport aircraft are divided into two groups:
Those that comply with Extended Twin Engine Operating Regulations (ETOPS or EROPS), and
Those that do not comply with ETOPS
ETOPS Where an airline complies fully with the criteria for aircraft systems reliability then approval for ETOPS may be given. This entitles the operator to use routes where the maximum diversion time, known as rule time, to a suitable airfield is 120 minutes at the normal one engine inoperative cruise speed. The Rule Time can be increased in the following circumstances:
After 6 months suitable operation to 138 minutes After 12 months further operations to 180 minutes maximum
The airline is expected to meet the requirements of the directives on Maintenance Practices and procedures, flight crew training and equipment. Non-ETOPS Unless specifically approved by the Authority in accordance with ETOPS Approval, an operator cannot operate a two-engined aeroplane

ATPL Performance ©Atlantic Flight Training 9-25
over a route which contains a point further from an adequate aerodrome than, in the case of:
Performance Class A aeroplanes with either:
i. A maximum approved passenger seating configuration of 20 or more; or
ii. A maximum take-off mass of 45 360kg or more, the distance flown in 60 minutes at the one-engine-inoperative cruise speed determined;
Performance Class A aeroplanes with either:
i. A maximum approved passenger seating configuration of 19 or less; or
ii. A maximum take-off mass of less than 45 360kg,
the distance flown in 120 minutes, or if approved by the authority up to 180 minutes for turbojet aeroplanes, at the one-engine-inoperative cruise speed determined; Performance Class B or C aeroplanes:
i. The distance flown in 120 minutes at the one-engine-
inoperative cruise speed determined; or ii. 300 nautical miles,
whichever is less.

ATPL Performance 30 October 2003 9-26
Payload Versus Range Using the graph below:
Point 1 Is the maximum permissible payload which may be limited by Maximum Zero Fuel Weight (MZFW), or by the capacity of holds or seating. This range may increase until The Maximum Authorized Take-Off Weight (MATOW) is reached (Point 2)
Point 2 The aircraft fuel tanks are not full at this point and the range can be
further increased by increasing the fuel load. However, this will be at the expense of the payload to remain within the MATOW.
Point 3 At point 3 the tanks are full and range can only be improved by
reducing aircraft weight to give a better Specific Air Range (SAR).
Payload (Kg)
Range (nm)
6000 4000 2000
500 1000 1500 2000
1 2
3

ATPL Performance ©Atlantic Flight Training 10-1
Chapter 10.
JAR Performance Class B Aeroplanes Performance Class B Propeller driven aeroplanes with a maximum approved passenger seating configuration of 9 or less, and a maximum take-off mass of 5700 kg or less are operated in accordance with JAR-OPS, Subpart H – Performance Class B JAR OPS 1 1.525 General A single engined aeroplane cannot be:
Operated at night, or In IMC unless under SVFR
Where a two engined Class B aeroplane does not meet the climb requirements detailed later then this aeroplane has to be treated as a single engined aeroplane. Take-Off and Landing Climb Take-off Climb
All Engines Operating
The steady gradient of climb after take-off must be at least 4% with:
Take-off power on each engine The landing gear extended except that if the landing gear can be
retracted in not more than 7 seconds, it may be assumed to be retracted
The wing flaps in the take-off position, and A climb speed not less than the greater of 1·1 VMC and 1·2 VS1.
One Engine Inoperative
The steady gradient of climb at an altitude of 400 ft above the take-off
surface must be measurably positive with:
The critical engine inoperative and its propeller in the minimum drag position;
The remaining engine at take-off power; The landing gear retracted; The wing flaps in the take-off position(s); and

ATPL Performance 30 October 2003 10-2
A climb speed equal to that achieved at 50 ft.
The steady gradient of climb must be not less than 0·75% at an altitude of 1500 ft above the take-off surface with:
The critical engine inoperative and its propeller in the minimum
drag position The remaining engine at not more than maximum continuous
power The landing gear retracted The wing flaps retracted, and A climb speed not less than 1·2 VS1.
Landing Climb
All Engines Operating
The steady gradient of climb must be at least 2·5% with:
Not more than the power or thrust that is available 8 seconds after initiation of movement of the power controls from the minimum flight idle position;
The landing gear extended; The wing flaps in the landing position; and A climb speed equal to VREF.
One Engine Inoperative
The steady gradient of climb must be not less than 0·75% at an altitude
of 1500 ft above the landing surface with:
The critical engine inoperative and its propeller in the minimum drag position;
The remaining engine at not more than maximum continuous power;
The landing gear retracted; The wing flaps retracted; and A climb speed not less than 1·2 VS1.
JAR OPS 1.530 Take-Off The operator ensures that the take-off mass does not exceed the maximum take-off mass specified in the Aeroplane Flight Manual for the pressure altitude and the ambient temperature at the aerodrome where the take-off is to be made. The figures below assume that the aeroplane will achieve the screen height of 50 ft.

ATPL Performance ©Atlantic Flight Training 10-3
The operator uses the unfactored take-off distance specified in the Aeroplane Flight Manual to ensure that it does not exceed:
When multiplied by a factor of 1·25, the take-off run available, or When stopway and/or clearway is available, any of the following:
The take-off run available When multiplied by a factor of 1·15, the take-off distance available, and When multiplied by a factor of 1·3, the accelerate-stop distance available.
The following have to be taken into account:
The mass of the aeroplane at the commencement of the take-off run. As a guideline the take-off distance will also increase by 20% for a 10% increase in weight.
The pressure altitude at the aerodrome; The ambient temperature at the aerodrome; The runway surface condition and the type of runway surface. The take distance
from the aeroplane flight manual should be factored by:
Surface Type Condition Factor Dry 1.20 Grass on firm soil up
to 20 cm long* Wet 1.30 Paved Wet 1.00
*The soil is firm when there are wheel impressions but no rutting
Problems can occur when an aeroplane is using Grass Runways:
Care should be taken in assessing the rate of acceleration If the take-off is rejected on short wet grass the surface may be slippery. In this
case the distance may be increased substantially. The runway slope in the direction of take-off must be taken into account:
Upslope up to 2% Take-off distance to be increased by 5% for each 1% of upslope Upslope > 2% Corrections for runways with an upslope of more than 2% require the approval of the authority

ATPL Performance 30 October 2003 10-4
Not more than 50% of the reported headwind component or not less than 150% of the reported tail-wind component can be factored into the take-off distance. Operations from contaminated runways are inadvisable. Take-off should be delayed until the runway is cleared. JAR OPS 1.535 Take-Off Obstacle Clearance – Multi Engined Aeroplanes The operator ensures that the take-off flight path of an aeroplane with two or more engines, will clear all obstacles by a vertical margin of at least:
50 ft, or By a horizontal distance of at least 90 m plus 0·125 x D, where D is the horizontal
distance traveled by the aeroplane from the end of the take-off distance available or the end of the take-off distance if a turn is scheduled before the end of the take-off distance available
except when detailed below. For aeroplanes with a wingspan of less than 60 m a horizontal obstacle clearance of half the aeroplane wingspan plus 60 m, plus 0.125 x D may be used. Take-Off Flight Path - Visual Course Guidance Navigation In order to allow visual course guidance navigation, an operator must ensure that the weather conditions prevailing at the time of operation including ceiling and visibility, are such that the obstacle and/or ground reference points can be seen and identified. The Operations Manual must specify, for the aerodrome concerned the minimum weather conditions which enable the flight crew to continuously determine and maintain the correct flight path with respect to ground reference points, so as to provide a safe clearance with respect to obstructions and terrain as follows:
The procedure must be well defined with respect to ground reference points so that the track to be flown can be analysed for obstacle clearance requirements;
The procedure must be within the capabilities of the aeroplane with respect to forward speed, bank angle and wind effects;
A written and/or pictorial description of the procedure must be provided for crew use; and
The limiting environmental conditions must be specified (e.g. wind, cloud, visibility, day/night, ambient lighting, obstruction lighting).
Safe Operation With Performance Class B Aeroplanes In Conditions Of Limited Visibility Unlike the Performance Class A Airworthiness requirements which are detailed in a later chapter, those for Performance Class B do not necessarily provide for engine failure in all

ATPL Performance ©Atlantic Flight Training 10-5
phases of flight. It is accepted that performance accountability for engine failure need not be considered until a height of 300 ft is reached. The weather minima given in Appendix 1 to JAR-OPS 1.430 up to and including 300 ft imply that if a take-off is undertaken with minima below 300 ft a one engine inoperative flight path must be plotted starting on the all-engine take-off flight path at the assumed engine failure height. This path must meet the vertical and lateral obstacle clearance specified. Should engine failure occur below this height, the associated visibility is taken as being the minimum which would enable the pilot to make, if necessary, a forced landing broadly in the direction of the take-off. At or below 300 ft, a circle and land procedure is extremely inadvisable. If the assumed engine failure height is more than 300 ft, the visibility must be at least 1500 m and, to allow for manoeuvring, the same minimum visibility should apply whenever the obstacle clearance criteria for a continued take-off cannot be met. To comply with the above the following it is assumed that:
The take-off flight path begins at a height of 50 ft above the surface at the end of the take-off distance required and ends at a height of 1500 ft above the surface.
The aeroplane is not banked before the aeroplane has reached a height of 50 ft above the surface. The angle of bank does not exceed 15° after this point.
Failure of the critical engine occurs at the point on the all engine take-off flight path where visual reference for the purpose of avoiding obstacles is expected to be lost.
The gradient of the take-off flight path from 50 ft to the assumed engine failure height is equal to the average all-engine gradient during climb and transition to the en-route configuration, multiplied by a factor of 0·77, and
The gradient of the take-off flight path from the height reached above to the end of the takeoff flight path is equal to the one engine inoperative en-route climb gradient shown in the Aeroplane Flight Manual.
Where the intended flight path does not require a track change of more than 15°, an operator need not consider obstacles which have a lateral distance greater than:
300 m, if the flight is conducted under conditions allowing visual course guidance navigation, or if navigational aids are available enabling the pilot to maintain the intended flight path with the same accuracy, or
600 m, for flights under all other conditions. Where the intended flight path requires track changes of more than 15°, an operator need not consider those obstacles which have a lateral distance greater than:
600 m for flights under conditions allowing visual course guidance navigation 900 m for flights under all other conditions.
To comply with the above, an operator must take account of the following:

ATPL Performance 30 October 2003 10-6
The mass of the aeroplane at the commencement of the take-off run; The pressure altitude at the aerodrome; The ambient temperature at the aerodrome; and Not more than 50% of the reported headwind component or not less than 150%
of the reported tailwind component. Take-Off Flight Path Construction For demonstrating that an aeroplane clears all obstacles vertically, a flight path should be constructed consisting of an all-engine segment to the assumed engine failure height, followed by an engine-out segment. Where the Aeroplane Flight Manual does not contain the appropriate data, the approximation given below may be used for the all-engine segment for an assumed engine failure height of 200 ft, 300 ft, or higher. The calculation formulae can be found in JAR OPS 1.535 JAR-OPS 1.540 - En-Route - Multi-Engined Aeroplanes The operator ensures that the aeroplane is capable of continuing flight at or above the relevant minimum altitudes for safe flight stated in the Operations Manual to a point 1000 ft above an aerodrome. The following are taken into account:
The meteorological conditions expected for the flight, and In the event of the failure of one engine, with the remaining engines operating
within the maximum continuous power conditions specified, at which the performance requirements can be met.
To comply with the above:
The aeroplane must not be assumed to be flying at an altitude exceeding that at which the rate of climb equals 300 ft per minute with all engines operating within the maximum continuous power conditions specified, and
The assumed en-route gradient with one engine inoperative shall be the gross gradient of descent or climb, as appropriate, correspondingly increased by a gradient of 0·5%, or decreased by a gradient of 0·5%.
The altitude at which the rate of climb equals 300 ft per minute is not a restriction on the maximum cruising altitude at which the aeroplane can fly in practice, it is merely the maximum altitude from which the driftdown procedure can be planned to start. Aeroplanes may be planned to clear en-route obstacles assuming a driftdown procedure, having first increased the scheduled en-route one engine inoperative descent data by 0·5% gradient.

ATPL Performance ©Atlantic Flight Training 10-7
JAR-OPS 1.542 - En-route - Single-Engine Aeroplanes The operator has to ensure that the aeroplane, in the meteorological conditions expected for the flight, and in the event of engine failure, is capable of reaching a place at which a safe forced landing can be made To comply with the above:
The aeroplane must not be assumed to be flying, with the engine operating within the maximum continuous power conditions specified, at an altitude exceeding that at which the rate of climb equals 300 ft per minute; and
The assumed en-route gradient shall be the gross gradient of descent increased by a gradient of 0·5%.
In the event of an engine failure, single-engine aeroplanes have to rely on gliding to a point suitable for a safe forced landing. Such a procedure is clearly incompatible with flight above a cloud layer which extends below the relevant minimum safe altitude. The altitude at which the rate of climb equals 300 ft per minute is not a restriction on the maximum cruising altitude at which the aeroplane can fly in practice, it is merely the maximum altitude from which the engine-inoperative procedure can be planned to start. The above statements require an operator to ensure that in the event of an engine failure, the aeroplane should be capable of reaching a point from which a successful forced landing can be made. Unless otherwise specified by the Authority, this point should be 1000ft above the intended landing area. JAR-OPS 1.545 - Landing - Destination And Alternate Aerodromes The landing mass of the aeroplane must not exceed the maximum landing mass specified for the altitude and the ambient temperature expected for the estimated time of landing at the destination and alternate aerodrome. JAR-OPS 1.550 - Landing - Dry Runway An operator shall ensure that the landing mass of the aeroplane determined for the estimated time of landing allows a full stop landing from 50 ft above the threshold within 70% of the landing distance available at the destination aerodrome and at any alternate aerodrome. The Authority may approve the use of landing distance data factored in accordance with this paragraph based on a screen height of less than 50 ft, but not less than 35 ft. Short Landing Operations may also be approved To comply with the above the following have to be taken into account:
The altitude at the aerodrome,

ATPL Performance 30 October 2003 10-8
Not more than 50% of the head-wind component or not less than 150% of the tail-wind component,
The runway surface condition and the type of runway surface, and The runway slope in the direction of landing
To despatch an aeroplane in accordance with the above, it must be assumed that:
The aeroplane will land on the most favourable runway, in still air, and The aeroplane will land on the runway most likely to be assigned considering: The probable wind speed and direction The ground handling characteristics of the aeroplane, and Other conditions such as landing aids and terrain.
If an operator is unable to comply with the above rules for the destination aerodrome, the aeroplane may be despatched if an alternate aerodrome is designated that complies. Steep Approach Procedures The Authority may approve the application of Steep Approach procedures using glideslope angles of 4.5° or more, and with screen heights of less than 50 ft but not less than 35 ft, provided that the following criteria are met:
The Aeroplane Flight Manual must state the maximum approved glideslope angle, any other limitations, normal, abnormal or emergency procedures for the steep approach as well as amendments to the field length data when using steep approach criteria;
A suitable glide path reference system, comprising at least a visual glidepath indicating system, must be available at each aerodrome at which steep approach procedures are to be conducted; and
Weather minima must be specified and approved for each runway to be used with a steep approach. Consideration must be given to the following:
The obstacle situation The type of glidepath reference and runway guidance such as visual
aids, MLS, 3D-NAV, ILS, LLZ, VOR, NDB The minimum visual reference to be required at DH and MDA Available airborne equipment Pilot qualification and special aerodrome familiarisation Aeroplane Flight Manual limitations and procedures, and Missed approach criteria.
Short Landing Operations The distance used for the calculation of the permitted landing mass may consist of the usable length of the declared safe area plus the declared landing distance available. The Authority may approve such operations in accordance with the following criteria:

ATPL Performance ©Atlantic Flight Training 10-9
The use of the declared safe area must be approved by the aerodrome authority The declared safe area must be clear of obstructions or depressions which would
endanger an aeroplane undershooting the runway, and no mobile object shall be permitted on the declared safe area while the runway is being used for short landing operations
The slope of the declared safe area must not exceed 5% upward slope or 2% downward slope in the direction of landing
The useable length of the declared safe area under the provisions of this Appendix shall not exceed 90 metres
The width of the declared safe area shall not be less than twice the runway width, centred on the extended runway centreline
It is assumed that the crossing height over the beginning of the usable length of the declared safe area shall not be less than 50 ft
For the purpose of this operation, the bearing strength requirement need not apply to the declared safe area
Weather minima must be specified and approved for each runway to be used and shall not be less than the greater of VFR or non-precision approach minima
Pilot requirements must be specified The Authority may impose such additional conditions as are necessary for safe
operation taking into account the aeroplane type characteristics, approach aids and missed approach/baulked landing considerations
Landing Distance Correction Factors Unless otherwise specified the following safety factor must be applied:
Grass (on firm soil up to 20 cm long) 1·15 Runway Slope The landing distances required should be increased by 5% for each 1% of downslope except that correction factors for runways with slopes in excess of 2% need the acceptance of the Authority Landing - Dry Runway JAR-OPS establishes two considerations in determining the maximum permissible landing mass at the destination and alternate aerodromes.
The aeroplane mass will be such that on arrival the aeroplane can be landed within 70% of the landing distance available on the most favourable, normally the longest, runway in still air. Regardless of the wind conditions, the maximum landing mass for an aerodrome/aeroplane configuration at a particular aerodrome, cannot be exceeded.
Consideration should be given to anticipated conditions and circumstances.

ATPL Performance 30 October 2003 10-10
The expected wind, or ATC and noise abatement procedures,
Which may indicate the use of a different runway. These factors may result in a lower landing mass than that permitted.
The expected wind is the wind expected to exist at the time of arrival. JAR-OPS 1.555 - Landing - Wet and Contaminated Runways The operator ensures that when the appropriate weather reports or forecasts indicate that the runway at the estimated time of arrival may be wet, the landing distance available is equal to or exceeds the required landing distance. The distance calculated in JAR OPS 1.550 is multiplied by a factor of 1·15. When the appropriate weather reports or forecasts indicate that the runway at the estimated time of arrival may be contaminated, the landing distance, determined by using data acceptable to the Authority for these conditions, does not exceed the landing distance available. A landing distance on a wet runway shorter than that required above, but not less than that required by JAR-OPS 1.550, may be used if the Aeroplane Flight Manual includes specific additional information about landing distances on wet runways. Landing on Wet Grass Runways When landing on very short grass which is wet, and with a firm subsoil, the surface may be slippery, in which case the distances may increase by as much as 60% (1.60 factor). It may not be possible for a pilot to determine accurately the degree of wetness of the grass, particularly when airborne, in cases of doubt, the use of the wet factor 1.15 is recommended.

ATPL Performance ©Atlantic Flight Training 11-1
Chapter 11.
JAR Performance Class A Aircraft Performance Class A Multi-engine aeroplanes powered by:
Turbopropeller engines with a maximum approved passenger seating configuration of more than 9 or a maximum take-off mass exceeding 5700 kg, and
All multi-engine turbojet powered aeroplanes are operated in accordance with JAR-OPS, Subpart G – Performance Class A JAR-OPS 1.485 – General The operator ensures the approved performance data in the Aeroplane Flight Manual is supplemented as necessary with other data acceptable to the Authority if the Approved Performance Data in the Aeroplane Flight Manual is insufficient with respect to items such as:
Accounting for reasonably expected adverse operating conditions such as take-off and landing on contaminated runways, and
Consideration of engine failure in all flight phases. An operator shall ensure that, for the wet and contaminated runway case, performance data determined in accordance with JAR 25X1591 or equivalent acceptable to the Authority is used. General - Wet and Contaminated Runway Data (JAR – 25 AMJ 25X1591) If the performance data has been determined on the basis of measured runway friction coefficient, the operator should use a procedure correlating the measured runway friction coefficient and the effective braking coefficient of friction of the aeroplane type over the required speed range for the existing runway conditions. Operation on Contaminated Runways Operation on runways contaminated with water, slush, snow or ice implies uncertainties with regard to runway friction and contaminant drag. The achievable performance and control of the aeroplane during take-off may not match the calculated figures since the actual conditions may not completely match the assumptions on which the performance information is based. In the case of a contaminated runway, the first option for the commander is to wait until the runway is cleared. If this is impracticable, he may consider a take-off, provided that he has applied the applicable performance adjustments, and any further safety measures he considers justified under the prevailing conditions.

ATPL Performance 30 October 2003 11-2
An adequate overall level of safety will only be maintained if operations in accordance with JAR-25 AMJ 25X1591 are limited to rare occasions. Where the frequency of such operations on contaminated runways is not limited to rare occasions, operators should provide additional measures ensuring an equivalent level of safety. Such measures should include special crew training, additional distance factoring and more restrictive wind limitations. JAR-OPS 1.490 - Take-Off The operator is to ensure that the take-off mass does not exceed the maximum take-off mass specified in the Aeroplane Flight Manual for the pressure altitude and the ambient temperature at the aerodrome at which the take-off is to be made. The operator must meet the following requirements when determining the maximum permitted take-off mass:
The accelerate-stop distance must not exceed the accelerate-stop distance available
The take-off distance must not exceed the take-off distance available, where clearway is not more than 50% of TORA
The take-off run must not exceed the take-off run available A single value of V1 for the rejected and continued take-off must be used, and On a wet or contaminated runway, the take-off mass must not exceed that
permitted for a take-off on a dry runway under the same conditions. The following must be taken into account:
The pressure altitude at the aerodrome The ambient temperature at the aerodrome and The runway surface condition and the type of runway surface The runway slope
in the direction of take-off Not more than 50% of the reported head-wind component or not less than 150%
of the reported tailwind component, and The loss, if any, of runway length due to alignment of the aeroplane prior to take-
off. This is discussed in Chapter 3) JAR-OPS 1.495 - Take-Off Obstacle Clearance The operator ensures that the net take-off flight path clears all obstacles by a vertical distance of at least:
35 ft, or By a horizontal distance of at least 90 m plus 0·125 x D, where D is the horizontal
distance the aeroplane has traveled from the end of the take-off distance available or the end of the take-off distance if a turn is scheduled before the end of the take-off distance available.

ATPL Performance ©Atlantic Flight Training 11-3
Aeroplanes with a wingspan of less than 60 m a horizontal obstacle clearance of half the aeroplane wingspan plus 60 m, plus 0.125 x D may be used. In accordance with the definitions used in preparing the take-off distance and take-off flight path Data provided in the Aeroplane Flight Manual: The net take-off flight path is considered to begin at a height of 35 ft above the runway or clearway at the end of the take-off distance determined by the method shown below. The take-off distance is greater of the following distances:
115% of the distance with all engines operating from the start of the take-off to the point at which the aeroplane is 35 ft above the runway or clearway, or
The distance from the start of the take-off to the point at which the aeroplane is 35 ft above the runway or clearway assuming failure of the critical engine occurs at the point corresponding to the decision speed (V1) for a dry runway, or
If the runway is wet or contaminated, the distance from the start of the take-off to the point at which the aeroplane is 15 ft above the runway or clearway assuming failure of the critical engine occurs at the point corresponding to the decision speed (V1) for a wet or contaminated runway.
JAR-OPS 1.495(a) specifies that the net take-off flight path, determined from the data provided in the Aeroplane Flight Manual must clear all relevant obstacles by a vertical distance of 35 ft. When taking off on a wet or contaminated runway and an engine failure occurs at the point corresponding to the decision speed (V1) for a wet or contaminated runway may clear close-in obstacles by only 15 ft. When taking off on wet or contaminated runways. The operator should exercise special care with respect to obstacle assessment, especially if a take-off is obstacle is limited and the obstacle density is high. Account must be taken of the following:
The mass of the aeroplane at the commencement of the take-off run, The pressure altitude at the aerodrome, The ambient temperature at the aerodrome, and Not more than 50% of the reported head wind component or not less than 150%
of the reported tailwind component. When showing compliance with the above:
Track changes are not allowed up to the point at which the net take-off flight path has achieved a height equal to one half the wingspan but not less than 50 ft above the elevation of the end of the take-off run available. Up to a height of 400 ft it is assumed that the aeroplane uses no more than 15° AOB. Above 400 ft height bank angles greater than 15°, but not more than 25° may be used

ATPL Performance 30 October 2003 11-4
Any part of the net take-off flight path in which the aeroplane is banked by more than 15° must clear all obstacles by a vertical distance of at least 50 ft, and
The operator must use special procedures, subject to the approval of the Authority, to apply increased bank angles of not more than 20° between 200 ft and 400 ft, or not more than 30° above 400 ft
For the use of increased bank angles requiring special approval, the
following criteria have to be met:
The Aeroplane Flight Manual must contain approved data for the required increase of operating speed and data to allow the construction of the flight path considering the increased bank angles and speeds.
Visual guidance must be available for navigation accuracy. Weather minima and wind limitations must be specified for each
runway and approved by the Authority.
Adequate allowance must be made for the effect of bank angle on operating speeds and flight path including the distance increments resulting from increased operating speeds.
The Aeroplane Flight Manual generally provides a climb gradient
decrement for a 15° bank turn. For bank angles of less than 15°, a proportionate amount should be applied, unless the manufacturer or Aeroplane Flight Manual has provided other data.
Unless otherwise specified in the Aeroplane Flight Manual or other performance or operating manuals from the manufacturer, acceptable adjustments to assure adequate stall margins and gradient corrections are provided by the following:
Bank Angle
Speed Gradient Correction
15° V2 Aeroplane Flight Manual 15° Gradient loss 20° V2 + 5 kt 2 x Aeroplane Flight Manual 15° Gradient
loss 25° V2 + 10 kt 2 x Aeroplane Flight Manual 15° Gradient
loss Where the intended flight path does not require track changes of more than 15°, an operator need not consider those obstacles which have a lateral distance greater than:
300 m, if the pilot is able to maintain the required navigational accuracy through the obstacle accountability area, or
600 m, for flights under all other conditions.

ATPL Performance ©Atlantic Flight Training 11-5
Where the intended flight path does require track changes of more than 15°, an operator need not consider those obstacles which have a lateral distance greater than:
600 m, if the pilot is able to maintain the required navigational accuracy through the obstacle accountability area, or
900 m for flights under all other conditions. The operator establishes contingency procedures to satisfy the requirements of JAR-OPS 1.495 and to provide a safe route, avoiding obstacles, to enable the aeroplane to either comply with the en-route requirements of JAR-OPS 1.500, or land at either the aerodrome of departure or at a take-off alternate aerodrome. If the above is based on an engine failure route that differs from the all engine departure route or SID normal departure, a "deviation point" can be identified where the engine failure route deviates from the normal departure route. Adequate obstacle clearance along the normal departure with failure of the critical engine at the deviation point will normally be available. In certain situations the obstacle clearance along the normal departure route may be marginal and should be checked to ensure that, in case of an engine failure after the deviation point, a flight can safely proceed along the normal departure. JAR-OPS 1.500 - En-Route - One Engine Inoperative The operator ensures that the one engine inoperative en-route net flight path data shown in the Aeroplane Flight Manual complies with parameters set out in the next two paragraphs below at all points along the route. The net flight path must have a positive gradient at 1500 ft above the aerodrome where the landing is assumed to be made after engine failure. In meteorological conditions requiring the operation of ice protection systems, the effect of their use on the net flight path must be taken into account.
The gradient of the net flight path must be positive at least 1000 ft above all terrain and obstructions along the route within 9·3 km (5 nm) on either side of the intended track.
The net flight path must permit the aeroplane to continue flight from the cruising altitude to an aerodrome where a landing can be. The net flight path clearing vertically, by at least 2000 ft, all terrain and obstructions along the route within 9.3 km (5 nm) on either side of the intended track with regard to the following:
The engine is assumed to fail at the most critical point along the route, Account is taken of the effects of winds on the flight path, Fuel jettisoning is permitted to an extent consistent with reaching the
aerodrome with the required fuel reserves, if a safe procedure is used, and
The aerodrome where the aeroplane is assumed to land after engine failure must meet the following criteria:
The performance requirements at the expected landing mass are
met, and

ATPL Performance 30 October 2003 11-6
Weather reports or forecasts, or any combination thereof, and field condition reports indicate that a safe landing can be accomplished at the estimated time of landing.
The operator must increase the width margins above to 18·5 km (10 nm) if the navigational accuracy does not meet the 95% containment level. JAR-OPS 1.505 - En-route - Aeroplanes with Three or More Engines, Two Engines Inoperative At no point along the intended track will an aeroplane having three or more engines be more than 90 minutes, at the all-engines long range cruising, away from an aerodrome at which the performance requirements applicable at the expected landing mass are met unless it complies with the paragraphs below. The two engines inoperative en-route net flight path data must permit the aeroplane to continue the flight, in the expected meteorological conditions, from the point where two engines are assumed to fail simultaneously, to an aerodrome at which it is possible to land and come to a complete stop when using the prescribed procedure for a landing with two engines inoperative. The net flight path must clear vertically, by at least 2000 ft all terrain and obstructions along the route within 9·3 km (5 nm) on either side of the intended track. At altitudes and in meteorological conditions requiring ice protection systems to be operable, the effect of their use on the net flight path data must be taken into account. If the navigational accuracy does not meet the 95% containment level, an operator must increase the width margin given above to 18·5 km (10 nm). The two engines are assumed to fail at the most critical point of that portion of the route where the aeroplane is more than 90 minutes, at the all engines long range cruising speed, away from an aerodrome at which the performance requirements applicable at the expected landing mass are met. The net flight path must have a positive gradient at 1500 ft above the aerodrome where the landing is assumed to be made after the failure of two engines. Fuel jettisoning is permitted to an extent consistent with reaching the aerodrome with the required fuel reserves, if a safe procedure is used. The expected mass of the aeroplane at the point where the two engines are assumed to fail must not be less than that which would include sufficient fuel to proceed to:
An aerodrome where the landing is assumed to be made, and To arrive there at least 1500 ft directly over the landing area, and To fly level for 15 minutes.
JAR-OPS 1.510 - Landing - Destination and Alternate Aerodromes The landing mass of the aeroplane must not exceed the maximum landing mass specified for the altitude and the ambient temperature expected for the estimated time of landing at the destination and alternate aerodrome.

ATPL Performance ©Atlantic Flight Training 11-7
For instrument approaches with decision heights below 200 ft, an operator must verify that the approach mass of the aeroplane, taking into account the take-off mass and the fuel expected to be consumed in flight, allows a missed approach gradient of climb, with the critical engine failed and with the speed and configuration used for go-around of at least 2·5%, or the published gradient, whichever is the greater. The Authority must approve the use of an alternative method The missed approach procedure of an instrument approach as shown on instrument approach charts is normally based on an obstacle clearance surface having a slope of 2.5%. All aeroplanes cannot achieve this when operating at or near maximum certificated landing mass and in engine-out conditions. Operators of these aeroplanes should consider mass, altitude and temperature limitations and wind for the missed approach at aerodromes which are critical due to obstacles in the missed approach areas. An increase in the decision altitude/height or minimum descent altitude/height may, as a result, be required. JAR-OPS 1.515 - Landing - Dry Runways The landing mass of the for the estimated time of landing at the destination aerodrome and at any alternate aerodrome must be such as to allow a full stop landing from 50 ft above the threshold:
For turbo-jet powered aeroplanes, within 60% of the landing distance available, or For turbo-propeller powered aeroplanes, within 70% of the landing distance
available, For Steep Approach procedures the Authority may approve the use of landing
distance Data based on a screen height of less than 50 ft, but not less than 35 ft. The Authority may exceptionally approve, when satisfied that there is a need, the
use of Short Landing Operations When showing compliance with the above, an operator must take account of the following:
The altitude at the aerodrome, Not more than 50% of the head-wind component or not less than 150% of the
tailwind component, and The runway slope in the direction of landing if greater than ± 2%.
When showing compliance with sub-paragraph (a) above, it must be assumed that:
The aeroplane will land on the most favourable runway, in still air, and The aeroplane will land on the runway most likely to be assigned considering the
probable wind speed and direction and the ground handling characteristics of the aeroplane, and considering other conditions such as landing aids and terrain.

ATPL Performance 30 October 2003 11-8
If an operator is unable to comply with the above for a destination aerodrome having a single runway where a landing depends upon a specified wind component, an aeroplane may be despatched if 2 alternate aerodromes are designated which permit compliance. Before commencing an approach to land at the destination aerodrome the commander must satisfy himself that a landing can be made with regard to the above paragraphs. Where the landing conditions at the destination mean that the above conditions cannot be complied with the operator may still despatch the aeroplane. This may be done if the conditions at the alternate are such that the rules for landing are complied with. Steep Approach Procedures The Authority may approve the application of Steep Approach procedures using glideslope angles of 4·5° or more and with screen heights of less than 50 ft but not less than 35 ft, provided that the following criteria are met:
The Aeroplane Flight Manual must state the maximum approved glideslope angle, any other limitations, normal, abnormal or emergency procedures for the steep approach as well as amendments to the field length data when using steep approach criteria,
A suitable glidepath reference system comprising at least a visual glidepath indicating system must be available at each aerodrome at which steep approach procedures are to be conducted, and
Weather minima must be specified and approved for each runway to be used with a steep approach.
Consideration must be given to the following:
The obstacle situation, The type of glidepath reference and runway guidance such as visual aids, MLS,
3D-NAV, ILS, LLZ, VOR, NDB, The minimum visual reference to be required at DH and MDA, Available airborne equipment, Pilot qualification and special aerodrome familiarisation, Aeroplane Flight Manual limitations and procedures, and Missed approach criteria.
JAR-OPS 1.520 - Landing - Wet and Contaminated Runways When the appropriate weather reports or forecasts indicate that the runway at the estimated time of arrival may be wet or contaminated, the landing distance available must be at least 115% of the required landing distance. A landing distance on a wet runway shorter than that required, but not less than that required by JAR-OPS 1.515, may be used if the Aeroplane Flight Manual includes specific additional information about landing distances on wet runways.

ATPL Performance ©Atlantic Flight Training 11-9
A landing distance on a specially prepared contaminated runway shorter than that required may be used if the Aeroplane Flight Manual includes specific additional information about landing distances on contaminated runways.

ATPL Performance 30 October 2003 11-10
Intentionally Left Blank

ATPL Performance ©Atlantic Flight Training 12-1
Chapter 12.
JAR Performance Class A Aircraft
JAR 25 – Large Aeroplanes JAR 25.101 General Unless otherwise prescribed, aeroplanes must meet the applicable performance requirements for ambient atmospheric conditions and still air. The performance, as affected by engine power or thrust, must be based on the following relative humidities:
80%, at and below standard temperatures; and 34%, at and above standard temperatures plus 50°F.
Between these two temperatures, the relative humidity must vary linearly. The performance must correspond to the propulsive thrust available under:
The particular ambient atmospheric conditions, The particular flight condition, and The relative humidity specified above.
JAR 25.105 Take-off Take-off speeds, the accelerate-stop distance, the take-off path and the take-off distance and take-off run must be determined:
At each weight, altitude, and ambient temperature within the operational limits selected by the applicant; and
In the selected configuration for take-off. No take-off made to determine the data required by this section may require exceptional piloting skill or alertness. The take-off data must be based on:
Smooth, dry and wet, hard-surfaced runways; and At the option of the applicant, grooved or porous friction course wet, hard-
surfaced runways.

ATPL Performance 30 October 2003 12-2
JAR 25.107 Take-off Speeds V1 must be established in relation to VEF as follows:
VEF is the calibrated airspeed at which the critical engine is assumed to fail. VEF must be selected by the applicant, but may not be less than VMCG
V1, in terms of calibrated airspeed, is selected by the applicant; however, V1 may not be less than VEF plus the speed gained with the critical engine inoperative during the time interval between the instant at which the critical engine is failed, and the instant at which the pilot recognises and reacts to the engine failure. This is taken as when the pilot's initiates a first action such as:
Applying brakes, Reducing thrust, Deploying speed brakes.
V2MIN, in terms of calibrated airspeed, may not be less than:
1·13 VSR for:
Two-engined and three-engined turbo-propeller powered aeroplanes; and Turbojet powered aeroplanes without provisions for obtaining a
significant reduction in the one-engine-inoperative power-on stall speed;]
1·08 VSR for:
Turbo-propeller powered aeroplanes with more than three engines; and Turbojet powered aeroplanes with provisions for obtaining a significant
reduction in the one-engine-inoperative power-on stall speed: and
1·10 times VMC V2 in terms of calibrated airspeed, must be selected by the applicant to provide at least the gradient of climb required but may not be less than:
V2MIN; VR plus the speed increment attained before reaching a height of 35 ft above the
take-off surface; and A speed that provides the manoeuvring capability specified
VMU is the calibrated airspeed at and above which the aeroplane can safely lift off the ground, and continue the take-off. VMU speeds must be selected by the applicant throughout the range

ATPL Performance ©Atlantic Flight Training 12-3
of thrust-to-weight ratios to be certificated. These speeds may be established from free air data if these data are verified by ground take-off tests. VR in terms of calibrated air speed, must be selected in accordance with the conditions below:
VR may not be less than:
V1; 105% of VMC; The speed that allows reaching V2 before reaching a height of 35 ft
above the take-off surface; or A speed that, if the aeroplane is rotated at its maximum practicable rate,
will result in a VLOF of not less than 110% of VMU in the all-engines-operating condition and not less than 105% of VMU determined at the thrust-to-weight ratio corresponding to the one-engine-inoperative condition, except that in the particular case that lift-off is limited by the geometry of the aeroplane, or by elevator power, the above margins may be reduced to 108% in the all-engines-operating case and 104% in the one-engine-inoperative condition.
For any given set of conditions (such as weight, configuration, and temperature), a single value of VR, obtained in accordance with this paragraph, must be used to show compliance with both the one-engine-inoperative and the all-engines-operating take-off provisions. It must be shown that the one-engine-inoperative take-off distance, using a rotation speed of 5 knots less than VR does not exceed the corresponding one-engine-inoperative take-off distance using the established VR. Reasonably expected variations in service from the established take-off procedures for the operation of the aeroplane (such as over-rotation of the aeroplane and out-of-trim conditions) may not result in unsafe flight characteristics or in marked increases in the scheduled take-off distances. VLOF is the calibrated airspeed at which the aeroplane first becomes airborne. VFTO, in terms of calibrated airspeed, must be selected by the applicant to provide at least the gradient of climb required but may not be less than:
1·18 VSR; and A speed that provides the manoeuvring capability specified
JAR 25.109 Accelerate-Stop Distance The accelerate-stop distance on a dry runway is the greater of the following distances: The sum of the distances necessary to:

ATPL Performance 30 October 2003 12-4
Accelerate the aeroplane from a standing start with all engines operating to VEF
for take-off from a dry runway; Allow the aeroplane to accelerate from VEF to the highest speed reached during
the rejected take-off, assuming the critical engine fails at VEF and the pilot takes the first action to reject the take-off at the V1 from a dry runway; and
Come to a full stop on a dry runway from the speed, plus A distance equivalent to 2 seconds at the V1 for take-off from a dry runway.
The sum of the distances necessary to:
Accelerate the aeroplane from a standing start with all engines operating to the highest speed reached during the rejected take-off, assuming the pilot takes the first action to reject the take-off at the V1 for take-off from a dry runway; and
With all engines still operating, come to a full stop on a dry runway from the speed reached as prescribed, plus
A distance equivalent to 2 seconds at the V1 for take-off from a dry runway. The accelerate-stop distance on a wet runway is the greater of the following distances:
The accelerate-stop distance on a dry runway, or The accelerate-stop distance determined except that the runway is wet and the
corresponding wet runway values of VEF and V1 are used. In determining the wet runway accelerate-stop distance, the stopping force from the wheel brakes may never exceed:
The wheel brakes stopping force determined, and The force resulting from the wet runway braking coefficient of friction
taking into account the distribution of the normal load between braked and unbraked wheels at the most adverse centre of gravity position approved for take-off.
JAR 25.111 Take-Off Path The take-off path extends from a standing start to a point in the take-off at which the aeroplane is 1500 ft above the take-off surface, or at which the transition from the take-off to the en-route configuration is completed and VFTO is reached, whichever point is higher. In addition:
The take-off path must be based on the procedures prescribed in JAR 25. The aeroplane must be accelerated on the ground to VEF, at which point the
critical engine must be made inoperative and remain inoperative for the rest of the take-off; and
After reaching VEF, the aeroplane must be accelerated to V2.

ATPL Performance ©Atlantic Flight Training 12-5
During the acceleration to speed V2, the nose gear may be raised off the ground at a speed not less than VR. Landing gear retraction may not be begun until the aeroplane is airborne. During the take-off path determination:
The slope of the airborne part of the take-off path must be positive at each point; The aeroplane must reach V2 before it is 35 ft above the take-off surface and
must continue at a speed as close as practical to, but not less than V2 until it is 400 ft above the take-off surface;
At each point along the take-off path, starting at the point at which the aeroplane reaches 400 ft above the take-off surface, the available gradient of climb may not be less than:
1·2% for two-engined aero-planes; 1·5% for three-engined aero-planes; and 1·7% for four-engined aero-planes, and
Except for gear retraction and automatic propeller feathering, the aeroplane configuration may not be changed, and no change in power or thrust that requires action by the pilot may be made, until the aeroplane is 400 ft above the take-off surface. The take-off path must be determined by a continuous demonstrated take-off or by synthesis from segments. If the take-off path is determined by the segmental method:
The segments must be clearly defined and must relate to the distinct changes in the configuration, power or thrust, and speed;
The weight of the aeroplane, the configuration, and the power or thrust must be constant throughout each segment and must correspond to the most critical condition prevailing in the segment;
The flight path must be based on the aeroplane's performance without ground effect; and
The take-off path data must be checked by continuous demonstrated take-offs up to the point at which the aeroplane is out of ground effect and its speed is stabilised, to ensure that the path is conservative to the continuous path.
The aeroplane is considered to be out of the ground effect when it reaches a height equal to its wing span. The Net Flight Path The Net Flight Path can be either a 4 or 6 segment process:
Four Segment Flight Path
1st Segment Commences at screen height at the end of TODR when the landing gear “UP” button is pressed

ATPL Performance 30 October 2003 12-6
Speed is V2 The power is to maximum take-off power one-engine inoperative Ends when the landing gear is retracted fully
2nd Segment The speed and power are maintained until the aeroplane achieves the flap retraction altitude – minimum 400 ft gross altitude Ends when the when the aeroplane achieves 400 ft gross
Segments 1 and 2 are known as the initial climb 3rd Segment The acceleration segment
This segment can be level or climbing, this depends upon the power available Ends when the aeroplane achieves the final segment climb speed – flaps must be fully retracted
4th Segment Final Climb 5 minutes after brake release the power has to be reduced to maximum continuous power setting Speed is maintained at the final segment climb speed Ends at 1500 ft net height
Six Segment Climb
5th/6th Segment Aeroplanes with limited power available may require 2 extra segments to reach the 1500 ft point and the en-route climb speed.
JAR 25.113 Take-off Distance And Take-off Run Take-off distance on a dry runway is the greater of:
The horizontal distance along the take-off path from the start of the take-off to the point at which the aeroplane is 35 ft above the take-off surface for a dry runway; or
115% of the horizontal distance along the take-off path, with all engines operating, from the start of the take-off to the point at which the aeroplane is 35 ft above the take-off surface
Take-off distance on a wet runway is the greater of:
The take-off distance on a dry runway is calculated by the method above, or

ATPL Performance ©Atlantic Flight Training 12-7
The horizontal distance along the take-off path from the start of the take-off to the point at which the aeroplane is 15 ft above the take-off surface, achieved in a manner consistent with the achievement of V2 before reaching 35 ft above the take-off surface, determined for a wet runway.
If the take-off distance does not include a clearway, the take-off run is equal to the take-off distance. If the take-off distance includes a clearway:
The take-off run on a dry runway is the greater of:
The horizontal distance along the take-off path from the start of the take-off to a point equidistant between the point at which VLOF is reached and the point at which the aeroplane is 35 ft above the take-off surface for a dry runway; or
115% of the horizontal distance along the take-off path, with all engines operating, from the start of the take-off to a point equidistant between the point at which VLOF is reached and the point at which the aeroplane is 35 ft above the take-off surface.
The take-off run on a wet runway is the greater of:
The horizontal distance along the take-off path from the start of the take-
off to the point at which the aeroplane is 15 ft above the take-off surface, achieved in a manner consistent with the achievement of V2 before reaching 35 ft above the take-off surface for a wet runway; or
115% of the horizontal distance along the take-off path, with all engines operating, from the start of the take-off to a point equidistant between the point at which VLOF is reached and the point at which the aeroplane is 35 ft above the take-off surface.
JAR 25.115 Take-off Flight Path The take-off flight path is considered to begin 35 ft above the take-off surface at the end of the take-off distance as appropriate for the runway surface condition. The net take-off flight path data must be determined so that they represent the actual take-off flight paths reduced at each point by a gradient of climb equal to:
0·8% for two-engined aeroplanes; 0·9% for three-engined aeroplanes; and 1·0% for four-engined aeroplanes.
JAR 25.119 Landing Climb: All-Engines-Operating In the landing configuration, the steady gradient of climb may not be less than 3·2%, with:

ATPL Performance 30 October 2003 12-8
The engines at the power or thrust that is available 8 seconds after initiation of movement of the power or thrust controls from the minimum flight idle to the go-around power or thrust setting, and
A climb speed which is not less than: 1·08 VSR for aeroplanes with four engines on which the application of
power results in a significant reduction in stall speed; or 1·13 VSR for all other aeroplanes; Not less than VMCL; and Not greater than VREF.
JAR 25.121 Climb: One-Engine-Inoperative Take-off; landing gear extended In the critical take-off configuration existing along the flight path between the points at which the aeroplane reaches VLOF and at which the landing gear is fully retracted and in the configuration used in JAR 25.111 but without ground effect, the steady gradient of climb must be:
Positive for two-engined aeroplanes, and Not less than 0·3% for three-engined aeroplanes, or 0·5% for four-engined aeroplanes, at VLOF
The following conditions apply:
The critical engine inoperative and the remaining engines at the power or thrust available when retraction of the landing gear is begun unless there is a more critical power operating condition existing later along the flight path but before the point at which the landing gear is fully retracted, and
The weight equal to the weight existing when retraction of the landing gear is begun determined under JAR 25.111.
Take-off; landing gear retracted In the take-off configuration existing at the point of the flight path at which the landing gear is fully retracted, and in the configuration used in JAR 25.111 but without ground effect, the steady gradient of climb may not be less than:
2·4% for two-engined aeroplanes, 2·7% for three-engined aeroplanes and 3·0% for four-engined aeroplanes, at V2
The following conditions apply:
The critical engine inoperative, the remaining engines at the take-off power or thrust available at the time the landing gear is fully retracted, determined under

ATPL Performance ©Atlantic Flight Training 12-9
JAR 25.111, unless there is a more critical power operating condition existing later along the flight path but before the point where the aeroplane reaches a height of 400 ft above the take-off surface, and
The weight equal to the weight existing when the aeroplane's landing gear is fully retracted, determined under JAR 25.111.
Final take-off In the en-route configuration at the end of the take-off path determined in accordance with JAR 25.111, the steady gradient of climb may not be less than:
1·2% for two-engined aeroplanes, 1·5% for three-engined aeroplanes, and 1·7% for four-engined, at VFTO
The following conditions apply:
The critical engine inoperative and the remaining engines at the available maximum continuous power or thrust; and
The weight equal to the weight existing at the end of the take-off path, determined under JAR 25.111.
Approach In a configuration corresponding to the normal all-engines-operating procedure in which VSR for this configuration does not exceed 110% of the VSR for the related all-engines-operating landing configuration, the steady gradient of climb may not be less than
2·1 % for two-engined aeroplanes, 2·4% for three-engined aeroplanes and 2·7% for four-engined aeroplanes
The following conditions apply:
The critical engine inoperative, the remaining engines at the go-around power or thrust setting;
The maximum landing weight; A climb speed established in connection with normal landing procedures, but not
more than 1·4 VSR; and Landing gear retracted
JAR 25.123 En-route Flight Paths For the en-route configuration, the flight paths must be determined at each weight, altitude, and ambient temperature, within the operating limits established for the aeroplane. The variation of weight along the flight path, accounting for the progressive consumption of fuel

ATPL Performance 30 October 2003 12-10
and oil by the operating engines, may be included in the computation. The flight paths must be determined at any selected speed, with:
The most unfavourable centre of gravity; The critical engines inoperative; The remaining engines at the available maximum continuous power or thrust; and The means for controlling the engine-cooling air supply in the position that
provides adequate cooling in the hot-day condition. The one-engine-inoperative net flight path data must represent the actual climb performance diminished by a gradient of climb of:
1·1% for two-engined aeroplanes, 1·4% for three-engined aeroplanes, and 1·6% for four-engined aeroplanes.
For three-or four-engined aeroplanes, the two-engine-inoperative net flight path data must represent the actual climb performance diminished by a gradient climb of:
0·3% for three-engined aeroplanes and 0·5% for four-engined aeroplanes.

ATPL Performance ©Atlantic Flight Training 13-1
Chapter 13.
JAR Performance Class C Aircraft
JAR-OPS 1.560 - General The operator must ensure that the approved performance Data in the Aeroplane Flight Manual is supplemented, as necessary, with other Data acceptable to the Authority if the approved performance Data in the Aeroplane Flight Manual is insufficient. JAR-OPS 1.565 - Take-Off An operator shall ensure that the take-off mass does not exceed the maximum take-off mass specified in the Aeroplane Flight Manual for the pressure altitude and the ambient temperature at the aerodrome at which the take-off is to be made. An operator shall ensure that, for aeroplanes which have take-off field length data contained in their Aeroplane Flight Manuals that do not include engine failure accountability, the distance from the start of the take-off roll required by the aeroplane to reach a height of 50 ft above the surface with all engines operating within the maximum take-off power conditions specified, when multiplied by a factor of either:
1·33 for aeroplanes having two engines; or 1·25 for aeroplanes having three engines; or 1·18 for aeroplanes having four engines,
does not exceed the take-off run available at the aerodrome at which the take-off is to be made. An operator shall ensure that, for aeroplanes which have take-off field length data contained in their Aeroplane Flight Manuals which accounts for engine failure, the following requirements are met in accordance with the specifications in the Aeroplane Flight Manual:
The accelerate-stop distance must not exceed the accelerate-stop distance available;
The take-off distance must not exceed the take-off distance available, with a clearway distance not exceeding half of the take-off run available;
The take-off run must not exceed the take-off run available; Compliance with this paragraph must be shown using a single value of V1 for the
rejected and continued take-off; and On a wet or contaminated runway the take-off mass must not exceed that
permitted for a take-off on a dry runway under the same conditions. To comply the operator must take account of the following:
The pressure altitude at the aerodrome;

ATPL Performance 30 October 2003 13-2
The ambient temperature at the aerodrome; The runway surface condition and the type of runway surface The runway slope in the direction of take-off Not more that 50% of the reported head-wind component or not less than 150%
of the reported tail-wind component; and The loss, if any, of runway length due [to alignment of the aeroplane prior to take-
off. JAR-OPS 1.570 - Take-Off Obstacle Clearance The take-off flight path with one engine inoperative must clear all obstacles by a vertical distance of at least:
50 ft plus 0·01 x D, or By a horizontal distance of at least 90 m plus 0·125 x D,
where D is the horizontal distance the aeroplane has traveled from the end of the take-off distance available. For aeroplanes with a wingspan of less than 60 m a horizontal obstacle clearance of half the aeroplane wingspan plus 60 m, plus 0.125 x D may be used. The take-off flight path must begin at a height of 50 ft above the surface at the end of the take-off distance and end at a height of 1500 ft above the surface. The following must be taken into account:
The mass of the aeroplane at the commencement of the take-off run; The pressure altitude at the aerodrome; The ambient temperature at the aerodrome; and Not more than 50% of the reported head-wind component or not less than 150%
of the reported tail-wind component. Track changes shall not be allowed up to that point of the take-off flight path where a height of 50 ft above the surface has been achieved. Up to a height of 400 ft it is assumed that the aeroplane is banked by no more than 15°. Above 400 ft height bank angles greater than 15°, but not more than 25° may be scheduled. Adequate allowance must be made for the effect of bank angle on operating speeds and flight path including the distance increments resulting from increased operating speeds. For cases which do not require track changes of more than 15°, an operator need not consider those obstacles which have a lateral distance greater than:
300 m, if the pilot is able to maintain the required navigational accuracy through the obstacle accountability area, or
600 m, for flights under all other conditions.

ATPL Performance ©Atlantic Flight Training 13-3
For track changes of more than 15°, an operator need not consider those obstacles which have a lateral distance greater than:
600 m, if the pilot is able to maintain the required navigational accuracy through the obstacle accountability area
900 m for flights under all other conditions. JAR-OPS 1.580 - En-Route - One Engine Inoperative In the event of any one engine becoming inoperative at any point on the route or on any planned diversion and with the other engine or engines operating within the maximum continuous power conditions specified, be capable of continuing the flight from the cruising altitude to an aerodrome where a landing can be made clearing obstacles within 9·3 km (5 nm) either side of the intended track by a vertical interval of at least:
1000 ft when the rate of climb is zero or greater; or 2000 ft when the rate of climb is less than zero.
The flight path shall have a positive slope at an altitude of 450 m (1500 ft) above the aerodrome where the landing is assumed to be made after the failure of one engine. The available rate of climb of the aeroplane shall be taken to be 150 ft per minute less than the gross rate of climb specified. If the navigational accuracy does not meet the 95% containment level then the above figures are increased to 18·5 km (10 nm). Fuel jettisoning is permitted to an extent consistent with reaching the aerodrome with the required fuel reserves, if a safe procedure is used. JAR-OPS 1.585 - En-Route - Aeroplanes with Three or More Engines, Two Engines Inoperative At no point along the intended track, will an aeroplane having three or more engines be more than 90 minutes at the all-engine long range cruising speed at standard temperature in still air, away from an aerodrome at which the performance requirements applicable at the expected landing mass are met. The two-engines inoperative flight path shown must permit the aeroplane to continue the flight, in the expected meteorological conditions, clearing all obstacles within 9·3 km (5 nm) either side of the intended track by a vertical interval of at least 2000 ft to an aerodrome where the performance requirements are met. The two engines are assumed to fail at the most critical point of that portion of the route where the aeroplane is more than 90 minutes, at the all engines long range cruising speed at standard temperature in still air to an aerodrome where the performance requirements are met.

ATPL Performance 30 October 2003 13-4
The expected mass of the aeroplane at the point where the two engines are assumed to fail must not be less than that which would include sufficient fuel to proceed to an aerodrome where the landing is assumed to be made, and to arrive there at an altitude of a least 450 m (1500 ft) directly over the landing area and thereafter to fly level for 15 minutes. The available rate of climb of the aeroplane shall be taken to be 150 ft per minute less than that specified. If the navigational accuracy does not meet the 95% containment the above distances must be increased to 18·5 km (10 nm). Fuel jettisoning is permitted to an extent consistent with reaching the aerodrome with the required fuel reserves, if a safe procedure is used. JAR-OPS 1.590 - Landing - Destination and Alternate Aerodromes The landing mass of the aeroplane must not exceed the maximum landing mass specified in the Aeroplane Flight Manual for the altitude and, if accounted for in the Aeroplane Flight Manual, the ambient temperature expected for the estimated time of landing at the destination and alternate aerodrome. JAR-OPS 1.595 - Landing - Dry Runways The landing mass of the aeroplane for the estimated time of landing must allow a full stop landing from 50 ft above the threshold within 70% of the landing distance available at the destination and any alternate aerodrome. The following must be taken into account:
The altitude at the aerodrome; Not more than 50% of the head-wind component or not less than 150% of the tail-
wind component; The type of runway surface, and The slope of the runway in the direction of landing
For despatching an aeroplane it must be assumed that:
The aeroplane will land on the most favourable runway in still air; and The aeroplane will land on the runway most likely to be assigned considering the
probable wind speed and direction and the ground handling characteristics of the aeroplane, and considering other conditions such as landing aids and terrain.
If an operator is unable to comply with the above for the destination aerodrome, the aeroplane may be despatched if an alternate aerodrome is designated which permits full compliance.

ATPL Performance ©Atlantic Flight Training 13-5
Landing Distance Correction Factors Unless otherwise specified in the Aeroplane Flight Manual the following correction factor is to be used: Grass (on firm soil up to 13 cm long) 1·20
Landing Runway Two considerations in determining the maximum permissible landing mass at the destination and alternate aerodromes are used.
The aeroplane mass will be such that on arrival the aeroplane can be landed within 70% of the landing distance available on the most favourable, normally the longest, runway in still air. Regardless of the wind conditions, the maximum landing mass for an aerodrome/aeroplane configuration at a particular aerodrome, cannot be exceeded.
Consideration should be given to anticipated conditions and circumstances. The expected wind, or ATC and noise abatement procedures, may indicate the use of a different runway. These factors may result in a lower landing mass than that permitted. In this case despatch should be based on this lesser mass.
JAR-OPS 1.600 - Landing - Wet and Contaminated Runways When the appropriate weather reports or forecasts indicate that the runway at the estimated time of arrival may be wet, the landing distance available is equal to or exceeds the required landing distance, determined by a factor of 1·15. When the appropriate weather reports or forecasts, or a combination thereof; indicate that the runway at the estimated time of arrival may be contaminated, the landing distance determined by using data acceptable to the Authority for these conditions, does not exceed the landing distance available.

ATPL Performance 30 October 2003 13-6
Intentionally Left Blank