Embed Size (px)
Citation preview

■—•■" ^piiiwi.m»>wwi»iiiiii wm*mi™mM*mmmmimp*'mim!»m**mnmmmim
AD
2 USAAVSCOM TECHNICAL REPORT 72-4 00
2 TWO METHODS OF PREDICTION OF o HOVERING PERFORMANCE
BY HAROLD Y. H. LAW
n n c —' -■ 'i'—^(
i-1: MP,R :!0 Wi
FEBRUARY 1972 u 3
C
DIRECTORATE OF RESEARCH, DEVELOPMENT, AND ENGINEERING
US ARMY AVIATION SYSTEMS COMMAND ST. LOUIS, MISSOURI
Roproducod by
NATIONAL TECHNICAL INFORMATION SERVICE
Springlield, Va. 23151
THIS DOCUMENT HAS BIEN APPROVED
FOR PUBLIC RELEASE AND SALE; ITS
DISTRIBUTION IS UNLIMITED.
M
u» ■^■^-■»^tfa.^.^—^,. ^

tlfg^Qg*m:«v.i .nnn<u\ini<miim«mmtii i .. u.,,,,^ . ....u.. i.iui.in..i IIIHIII^II in Jl IP!, mi Jill I,IIMI'.(.!.I)IJ. Mm mi- ipp I Piil'l ]li,\l!M,li"lin,m|JJHJ^IjyHUILJI(HJ|
Security CU«»ific«tton
DOCUMENT CONTROL DATA -R&D (S*curlly claiilllemllon ol till; body of mbiltmel ana Indixlng annolmtlon mu«l b» »nffd wh»n tfi« ovratl npotl I* €lma»lllmöj_
I. ORIOINATINS ACTIVITY (Corporml* mulhot)
Flight Standards and Qualification Division Directorate for RD&E
aa. ncpomr sacuniTY CLAMIFICATION
UNCLASSIFIED lb. cnouf
N/A ». MEPORT TITL«
Two Methods of Prediction of Hovering Performance
4. DCSCRIPTIVC NOTEtCTVp« ol rmpcrl and lnelu»lvm dmf)
Technical s. AUTHOnitl ^nrXnam«, mlddto Initial, ImUnmoi»)
Harold Y.H. Law
«. REPOHT DATE
February 1972 7a. TOTAL NO. OF PAGES
75 7b. NO. of nmw»
17 ■a. CONTRACT OR GRANT NO.
6. PROJECT NO.
»a. ORIGINATOR'* REPORT NUlrfBERttl
TR 72-lt
»6. OTHER REPORT NO<»» (Any olhat numbara Otal may ba aaalftad Ma tapett)
ADS TN 69-1 10. OltTRiauTION STATEMENT
Unlimited
II. SUPPLEMENTARY NOTES 12. SPONSORING MILITARY ACTIVITY
USAAVSCOM
This report presents two methods of prediction on the hovering performance of single-rotor helicopters. A generalized equation was formulated hy the use of numerical and empirical techniques from flight test data for the prediction of hovering performance. This generalized equation leads to two methods of prediction: the Generalized Method and the Two-Point Method. Both of these methods of predic- tion are simple and easy to apply, and require only limited flight data information to predict the entire range of hovering performance. .Furthermore, the accuracy of these methods In within 5% of the flight data. Specific working examples and procedures are given in the appendix.
72
A A PMM 4 4 TfS MBPLACBS DO PORW (47*. I J UU , Moy M 1 H g O OMOLETB PON ARMY USB.
AN «4, WHICH IB
UNCLASSIFIED Security CUBBiricatlon
- ■ . —. - - ^^"^t-"'■~^ '■ - " I . . .-^1 ^.-.....^ *

wm^nmmmmmfmm. mm i i "mmmmmmm llllllll ,...l J... .UIIJ.I JI1IIIII„I,ILI lll«iW«WWW™iW».J|IW>»>M«lilMJIIJI(ll|IJIIJUIWIJllll,IIUIJ.II)l|IJUI,|IIll,
UW CLASSIFIED Security Clasatflcation
K EV WORD! ROLE | WT
Hover: rig performance of helicopter
73
UNCLASSIFIED
Smrarilr ClataineaUen
tiiliiiliMilMttiliBiilBilil"iiriiiri«niaviTrt.i'li.'nwiirt , *.*,

P -.i..j. ■!. .'..iivt.1' \'L ^'^u"WMJafW"MW^TW*«V'''ffWTWTOPiiy.WlUJWffWWIi»'^li t!U-^iU'.'.f U'^w^ii.t^ii^ffjw^w j I»M»IJPIII j.ri^ij.,;iiuij)^piwtf>w^.'i"Wii^^Lm'^^>^
DISCLAIMER
The findings In this report are not to be construed as an official Department of the Army position unless so designated by other authorized documents.
'-•'-■ - ■■ -- ■'-■■--"-"■-^"^■-■^ •'■-'-~-,,nfc-miifrirt nr 'r-i n'

I^^^jppiqypw—j nil ,.i i ■HI...III wiw,p...,■!,!.i.M . . ..i,,iA.i...|.n^iiiitfi^wp,iWiiiLii. L.i.j,ii.i.ji,i MII.■mm ».uui««!' P ■ wjin .. .JPIPWH'I Ti,^T^ jf WHI m ■ pwgppfpWfgpiW .»»»Pf.T.ilWtp?!»! Iff'l li|,l. ■lJipyit.lll|PIH'.WffWiLimPl.^i;i.PI|l
ADS TN 69-
TWO METHODS OF PREDICTION OF HOVERING PERFORMANCE
By Harold Y. H. Law
February 1972
Directorate of Research, Development, and Engineering
US Army Aviation Systems Command St. Louis, Missouri
This document has been approved for public release and sale; Its distribution is unlimited.
iWiiiiiHiiiiiiiili tmm *"■"■■'-' mi i i"-^'•""■-—■■"-'■' —

«i ■■ mm *wmmi.\, ii...iiliimui.iii!iiiiii ^- - ■ n K.I.IIIU.IWIII.LIII. j .11, ii i iiiiiiniiii..,i,iii.iiiiiiii]i.ii.j .jiiMijim,^,,,»,,
PREFACE
Under AMC Regulation No. 70-32, the Flight Standards and Qualification Division, US Army Aviation Systems Command Is responsible for the development, promulgation and application of Aeronautical Design Standards (ADS) for US Army Aircraft Systems. As part cf this responsibility, a series of Aeronautical Design Standards Technical Notes will be published to provide substantiation for proposed standards, revisions and related studies. This report constitutes a portion of this series.
aLe CHARLES C. CRAWFORD, JR. Chief of Flight Standards and Qualification Division

V,.^wwWMV\m*wmmtn.Jt,]\M.iI,mm- ■■ 1 | m~i,nmsm.,mm*^v<fmiV*Wi UllUHWNflWHiJJ^'
TABLE OF CONTENTS
PAGE
SUMMARY . |
1. INTRODUCTION I
2. METHOD AND APPROACH 2
2.1 MATHEMATICAL MODEL 2 2.2 SELECTION OF EMPIRICAL FUNCTIONS 2 2.3 SOLVING FOR THE CONSTANTS 3 2.4 FITTING OF a AND b 4 2.5 GENERALIZED HOVERING EQUATION 5
3. RESULTS AND DISCUSSIONS 5
3.1 FLIGHT TEST DATA 5 3.2 SELECTION OF DATA 6 3.3 BEHAVIOR OF a AND b AS FUNCTIONS OF CT /o 6 3.4 GENERALIZED EQUATION OF PREDICTION . .^ 7 3.5 FLIGHT DATA REQUIRED FOR THE GENERALIZED METHOD OF
PREDICTION 8 3.6 SUGGESTED NEW METHOD OF FLIGHT TEST: THE TWO-POINT
METHOD 9 3.7 APPLICATIONS 10 3.8 ACCURACY OF METHODS 11
3.8.1 ACCURACY OF THE GENERALIZED METHOD II 3.8.1.1 COMPARISON OF THE PREDICTED AND
EXPERIMENTAL HOVERING PERFORMANCE. . . II 3.8.1.2 COMPARISON OF RELATIVE THRUST INCREASE 12 3.8.1.3 ACCURACY OF PREDICTION ON HELICOPTERS
OUTSIDE THIS STUDY 12
3.8.2 ACCURACY OF THE TWO-POINT METHOD 13
4. CONCLUSIONS 13
4.1 METHODS OF PREDICTION 14 4.1.1 GENERALIZED METHOD 14 4.1.2 TWO-POINT METHOD 14
4.2 APPLICATIONS 14 4.3 SUGGESTED DATA INFORMATION AND FLIGHT TEST METHOD. . . 15 4.4 EXTENSION OF THESE METHODS OF PREDICTION 15
uaaMuu . .^

f i... <aiMi. i ip.<■_■■. ....._... ■_ i -—, i|IIJ|Wll^lM""PWlll"IJI.UIiriLI iuui|iJI»MIl»JS»^wi™w>i.™i,"l"Hl.l"l»«ull"»«SIWPBiCP^
APPENDIX A 16
APPENDIX B 25
REFERENCLS 26
SYMBOLS 28
aaMiimajiMmMmit^m^^-w.,.^.^-.,, .. .,—,., ..._^,..,.^.....„ ..,,.. .

^^*W^^^^^^"WW'",P~I^WW''^^^^^""W'"^IIJI"L !■ !> ,'l" I " ! ' I l.^».-,!....-»»^ !■■■] <■.«... J.ll I Jill. |,i .., .M'l • - «— "■"' I.. —m. - .1 i ...»■,,,..-*
l SUMMARY
This report presents two methods of prediction on the hov«ring performance of single-rotor helicopters. Flight test data of ten helicopters (Bell 47 J-2, UH-I2E-4, YH-40, YH0-2HIJ, YUH-ID (48 ft. rotor), YUH-ID (44 ft. rotor), YHU-IB, UH-IC, CH-54A, and CH-47A) including one tandem, with solidity ranging from 0.030 to 0.105, gross weight from 1,550 to 38,000 lbs. and rotor diameter from 25 to 72 feet were investigated in this study. All the above aircrafts we'e tested within the past ten years.
By the use of numerical and empirical techniques, a generalized equation was formula+ed for the prediction of hovering performance. This generalized equation leads to two methods of prediction: the Generalized Method and the Two-Point Method.
The outstanding features of these two methods of prediction are first of all that they are simple and easy to apply. Secondly, they both require only limited flight data information (OGE Cp - Cj or one IGE skid height Cp - Cj data) to predict the entire range of hovering performance, thus reducing the time, manhours, and therefore the cost of flight tests. Thirdly, they provide accurate predictions within 5/t from the flight data. The Two- Point Method requires additional flight data, however it provides better accuracy than the Generalized Method.
Both of these methods were tested on the helicopters in this study and also on four other helicopters not included in this ^tudy. The results show that in all cases, the prediction of the relative thrust increase is within 5% deviation from the flight test data.
These two methods are flexible in their applications and can be success- fully employed in the following areas of prediction:
(1) a. Prediction of relative thrust increase (CJ/CJ^), given only aircraft dimensional characteristics.
b. Prediction of relative thrust increase (CJ/CJOT), given OGE.
(2) Prediction of IGE performance, given OGE flight data.
(3) Prediction of IGE performance, given predicted OGE performance by analytical formulation.
(4) Prediction of OGE and the rest of IGE performance, given one skid height IGE flight data.
(5) Prediction of IGE performance, given OGE and one low and one high power level flight data at various IGE. (Two-Point Method).
jjui»^».^»,-^—1;-^..„- .,

nOMmPP1 wi^iWJWiiM^wiiJAiiiwiwinwiiiiiiuiuiiHiimvuiijii iiii.ui.11i,ua|iiHijjip,n.,iii .iimp.uiijBpi,wBp|«w»i»»i*.Pi"^i|«nii«Hii|-^«mi|i|P>m«i i!« iuij!#.inmni. i. uwwup>)ijii>i."«M^iipiiii,iuiiii4«iiij»iiu1»i!>vu(iwi«ji|iimKi(iiij.iii!«ii,,iiM*i!"!,ii »HI
The last area of application suggests a new method of flight test, which is to fly on two constant power (Cp) levels with one high and one low power at various IGE skid heights.
The major portion of this report is to present the mathematical model and approaches, motivations, justification, discussions, and comparison with the flight data of these methods. Those who are interested in the working of these methods can refer to Appendix A for specific applications and procedures.
II
^ _ -^...^LAW.
"—■-— ' ■ Ä

f^m ■r~~-~~-'-' urnrn ■mpBPHswpipwiwww^iigiiwwi
I. INTRODUCTION
The ground effect on a Iifling airscrew was treated both mathematically and experimentally by Knight and Hefner (Reference I) in 1941. Experimental results were also reported by Zbrozek (Reference 2) in 1947. A summary of these results is presented by Gessow and Myers (Reference 3) in their book "Aerodynamics of the Helicopter."
In Zbrozek's experimental investigation, some twenty-five different rotor blades were used with various rotational speeds, number of blades, profile drags, shapes of blades, blade twists, and pitch settings. It wac concluded by Zbrozek that the relative increase of lift (C-r/Cj^)*, at constanl power depends mainly on (I) relative rotor height above ground, (Z/D) and (2) mean lift coefficient of the blade, C, , which can be expressed in terms of power level, Cjm/a. Rotational speed, number of blades, profile drag, and shape of blade exert only a minor influence on the increase in lift.
The experimental conclusion obtained by Zbrozek was based on static tests. For more realistic and up-to-date results, one needs to go into flight test of recent helicopters. With this in mind, the ground effect was reinvestigated by using recent flight test data.
Flight test data of the following helicopters. Bell 47 J-2, UH-I2E-4, YH-40, YH0-2HU, YUH-ID (48 ft. rotor), YUH-ID (44 ft. rotor), YHU-IB, UH-IC CH-54A, and CH-47A were collected and used in this study. The objective of this study is to find a method which will predict the relative thrust increase within a desired accuracy (5% deviation) without going into extensive and elaborate full-scale flight testing. Such a method of prediction is therefore useful not only in preliminary design, but also in nrftdicting the hovering performance accurately, which will result in ^e saving of time and cost of flight test.
The purpose of this report is to present such a method of prediction along with the verification of its accuracy and flexibility of application. In this report, major effort has been devoted to the study of single-rote type helicopters. However, the strictly tandem type helicopters could also be treated in a simi lar manner as presented here upon the availability of sufficient flight test data.
*Refer to page 28 for definitions for symbols
mm ■ -—- •>■■■■■;■ ■- • -

nun mmmfimmmmmm ■■"'• ""-"'"■ mtmm. •• ■'"—»
2. METHOD AND APPROACH
An empirical relationship illustrating the effect of rotor height on rotor thrust produced at constant power was concluded by 7brozek and is presented in Figure I. The approach of this study is to employ the currently available flight test data to reassess the relationship shown in Figure I by use of numerical techniques.
2.1 Mathematical Model
The aim of this model is to simulate the relationship between relative thrust (CJ/CJOO) and relative rotor height (Z/D) at constant power levels (Cj^/o) during hover. It is important to keep in mind that any experimental observations have inherent errors associated with them. These errors may be caused by instrumentations, external testing environment, or by the observer himself. They are generally not known and their causes may be different in each case. Therefore the approach of modeling is not to simulate each individual test case independently from other cases, but to simulate the general trends which are revealed from the available flight data of all helicopters considered in this study. From these general trends, a general expression and a method can be formulated to provide a close predic- tion of hovering performance for single-rotor type helicopters. This mathe- matical model should be simple and should provide close simulation to experimental results; and the methods of prediction resulting from this model should be easy to apply.
It is assumed here that the errors in the flight test data in this study follow the Gaussian distribution. This assumption will be substantiated later in this study. Then the principle of least squares and the statistical treatments can be meaningfully applied in the mathematical manipulations which are to follow in the course of this study.
2.2 Selection of Empirical Function
The recent flight test data and the results obtained by Zbrozek bot*, suggest that the functional relationship between Cj/CToo and Z/D at constant Cj^a is hyperbolic. This relation can be observed from Figure 2 through Figure 11. The objective is to select a general mathematical expression which can best represent the trend of this relationship. A logical way to implement this is to try the simplest types of functional relations first. A few of such relations were attempted to achieve this goal. They are listed below:
(I) power function: Y = aX^1
(2) First hyperbolic function: Y = _, aX + b
(3) Second hyperbolic function: Y
where a and b are constants.
X
X
aX + b
'■ ■-■■ i

'■*"' —"' wmm ummm.» ^w» mmmmm '
In this case Z/D and CJ/CJ^ are represented by X and Y restactive ly. It was found that the second hyperboMc function best represents the flight data. Therefore, this form was used to obtain empirical expressions for all helicopters investigated herewith. A comparison of the different,types of functions to simulate the data of the YHU-IB helicopter is shown in Figure 12, Discussion on the suitability of these empirical functions is presented in Appendix B.
2.3 Solving for the Constants
Having determined an empirical function that expresses the hovering performance at each power level in the form of
X Y =
aX + b
where X = Z/D, Y = cyC-p»,
the next step is to solve for the constants (a, b) of each helicopter at each power level so that this empirical function will best approximate the experimental result.
Let F. be the functional values of the data, and yi be the approximated values. In the least squares approximation, the quantity that needs to be minimized for the most probable values of yj is
m
i = I (I)
where m = number of data points
Tc satisfy the above condition (I), the following must be true:
6b \ I ^i - y^
(2)
6 m I (F, - y.)2 = 0
(3)
(5a i = l
anuaMüft ai ■ m MajMOiMrn'r- — — ■ ■ K»^^-, ^...„J. ,.„.._„, ,....^J^..,...... ^ „,—„—

rq^my'**«y?w7WT—"" '>ii>^w)MJj.^jiJiij/L»ffjiji.i.i,.iii,|ii.iiiww^|U'w#.l]WWIWWi||.i.i.ii iw^wi^^^iw^.^^.wvn|^wffW'.w^wMjfi'i^^iiiM.mi?M^^^1'wll,ww. P»>I.»IUIII ji j.i!!;^ui^!^^^^^^^^
Expanding (2) and (3),
m Y 2 G, = E F. . , Ai _
i
m £
i = l (aX. + b)-
(4)
m
I i-l (aXj + b)'
m
i = l
X;'
(aX. + b)3
i
(5)
Now the values of (a, b) can be determined for till power level- by solving the two simultaneous equations (4) and (5) by the classical Newton- Raphson method (Reference 4),
2.4 Fitting of a and b
Since the relative thrust increase CJ/CJ^ is a strong function of Z/D and Cj^/o it can be assumed that a and b are strong functions of Cj^/o. Now ix is required to find the general trends of a and b as a whole with resi.c-ct to Cj^/o, so that expressions of a and b as functions of Cj^/o can be obtained.
To do so, the principle of least squares approximation with orthogonal polynomials is applied to obtain a close fit of the data. The expression of this polynomial is of the form
y(X) = C0 + C^X + C^ + C^X3 + . . . + CnX
wh<=re C. , i =0, I , b, and X as CT /a.
2 J_ o v-5
, n, are constants, and y can be expressed as a or
This method minimizes the sum of the squares of the deviations between the functional and the approximated values to give the most probable approxi mat ion.
Th as
us, the expressions of a and b with respect to C /a can be written
'T» a = K10 + Kj! ( ) + K|2 ( )' + ... + Ktn (
a " a a
oo . n
b = K0„ + K01 (—^ ) + K00 (-—^ )2 + ... + K- (—^ )n
20 21 72 x2n
whero K , i = I , 2, j = 0, I, . . ., n, are constants.
""■'■--■- ■- - - —

»l.l 111 1,1 ll|l!!»ll).MUII' 'J'lJ'I'il., i. ;l|».i;il^M^IWl»»!il»i.iJilJ.Jl.l,i|.,.ll»»liJ^I^MB|liiJl)»1jii.|i^i|,^l|i|l |l||P,Wi>iiiji|i|iji,|ji,:.|ll.W.r ., iiipiiu,,! i..ipili>iWii.iiiini,i,.i|.i, ....„IJ.I.I
2.5 Generalized Hovering Equation
Now knowing that CT/C as a function of Z/D, a and b, and that a and b as functions of C-j-^o, a generalized hovering equation can be obtained by expressing a and b in terms of CjJ0 in the hyperbolic relation. This generalized equation can now be written as CT = Z/D
Si CK|0+K||(CTM/a) + ...+K(n(CTa)/a)":(Z/D) + CK20+K2| (^0)+.. .K2n(CToo/o)"]
In this equation, the constants K. ., can be calculated from the flight data and should be fixed for a ce-tain type of helicopters. Once the relative skid height, Z/D, and the power level, C-r /a, are specified, the corresponding relative thrust increase CT/CT , can be predicted.
The accuracy of simulation and the usage of this generalized equation will be discussed in Sections 3.7 and 3.8.
3. RESULTS AND DISCUSSIONS
3.1 Flight Test Data
In this study, the flight test data of the following aircrafts: (YUH-ID (48 ft. rotor), UH-IC, YH-40, YHU-IB, Bell 47 J-2, UH-I2E-4, YH0-2HU, YUH-ID (44 ft. rotor), CH-54A, CH-47A) were employed (References 5 to 13), The detai led breakdown of the data is presented on Tables II to XI . The data were extracted frort! the Cp - Cj curves of the flight test results from as low as one foot skid heignt to the out-of-ground skid height. They were then reduced to the parameters Cy/Cj , Z/D, and C-p^a and are shown in Figures 2 to I I .
These data represent a wide range of single-rotor helicopters (with one tandem) with the rotor solidity range from 0.030 to 0.105, and with the gross weight range from 1,550 lbs. to 38,000 lbs. The dimensional characteristics of these helicopters are presented on Table I. This diversity of helicopter categories which were tested within the past ten years may reduce the chances of bias toward any one type of helicopter. By so doing, a fair treatment can be performed on the prediction of hovering performances of a wide range of single-rotor helicopters.
One important understanding of the flight data needs to be pointed out here. Each of the C - C curves obtained from the performance reports (References 5 to 13) is a result of the hovering flight test at various rotor speeds and density altitudes, and also with slight influence of wind. There is in every case a spread of test data with a maximum of about b% deviation from the mean '''. A typical example of these Cp - Cj curves for the YHU-IB (Reference 7) hovering at 60 ft. skid height is shown in Figure 13. Therefore, an inherent 5% maximum error distribution is already
HMMMW^M

— • ■^'•""T""1- ''•■ W" WHHWW.IUJUPiHiiili i , MUM. j .H...I..IUI i »■I.I.III i ^ii.|.i,injMli.ni)iij.i^|^ijiiii^nniii|i.iU)|Hi|II.PW^Hffi«'"^il" ■ '"
incorporated in the data to be used at the very outset. Due to this charac- teristic of flight- data, it is therefore reasonable to accept a maximum of 5% deviation as the limit of tolerance in the prediction of hovering per- formance by the methods presented in this report.
3.2 Selection of Data
The trend of fligh+ data as presented in Figures 2 to I I needs first to he studied. A helicopter is considered hovering at OGE when the value of Cj/C-r ^reaches I. In other words, the ground effect at OGE has negligible influence on the relative thrust increase. As presented in the figures, it can be observed immediately that the data follow a hyperbolic trend very nicely until CJ/CJ = I. From then on, the value of CJ/CJ«, remains to be 1.0 as the value of Z/D incraa. os. The figure below clarifies this point.
Approximating function
O Flight data
Because of the discontinuity of the hyperbola at OGE, the objective of fitting an empirical function through these data points is to obtain an expression that will best approximate the experimental result within the IGE region. With this criterion in mind, one therefore is lead to fit a curve through the IGE data points as closely as possible and put less emphasis on the OGE data in this process of curve fitting. The data beyond OGE tend to bias the approximating function, resulting in a larger deviation from the flight data. Using YUH-ID as an example, this influence on the least squares approximation by the data at and beyond OGE can be clearly observed in Figure 14.
and "b" as functions of Cx /a .
The values of a and b were plotted with respect to the constant power term Cj /0 in Figures 15 and 16. The distribution of the values of a as presented in Figure 15 shows a definite linear relation with power levels.
(I) It is not clear whether the hovering performance curves were drawn through the data points by the least squares method, or the method of averages, or simply by human judgment.
- --- „^^..^.^ .■

l|U.Bin|J>M|<W. .Ill, I ——— ■ I '"I"""1 !" JMI11IHIIIII .u I.IJI.III'W»!'.!. .ii.iiiin».
However, there is a scatter in the values of b with respect to power levels as presented in Figure 16. It is not immediately discernible as to what degre of polynomial is most suitable in fitting such data. Therefore, polynomials up to the third degree were attempted to approximate this rela- tionship. It was then found that the differences were so minute that the approximating polynomials of the second and the third degree were essentially the same as that of the first degree. Thus a linear relationship between b and C-r /o was used in fitting through the data points. Hence, the linear functions of a and b with respect to Cj /a can be written in the form of
a = Kj + K2(CT /a)
and b = K3 + ^(C^/o)
where K,, K2, Ky K4 are constants
(3.1)
One phenomenon which can be readily observed from Figure 15 and 16 is that for each individual helicopter the values of a and b form linear or very close to linear relationship with the parameter Cy^/o. Hence, to prov'de a closer prediction in the hovering performance, these individual linear relationships can be used instead of ihe linear functions obtained from the overall least squares fit. These individual linear functions retain the form of (3.1). However, the constants K's will be different for each helicopter. This observation of individual linear fu.-.ctions leads to the motivation of a new flight test method which wil I reduce the time and cost of flight testing and will be discussed in Section 3.6.
3.4 Generalized Equation of Prediction
The function of a and b with respect to C /o is linear as discussed in the previous section. Then the general i zedf0equation of hovering performance can be simplified into the following form.
Z/D
CT " LKi + K7(CT /o)J(Z/D) + LKT + K.tC.,. /oTJ I 00 I /. I oo J 4 Jon
(4.1)
This equation can be expressed in the form (4.2) in order to facilitate the calculation of the thrust coefficient at OGE corresponding to the CT
at IGE under the same power level:
r * = LT
[K^Z/D) + K3]
(l/C - K2/a)(Z/D) - K4/a (4,2)
mmmmm ii «lÜÜii

GmmmmmmmmmßM ■wm
The figure below Illustrates the definition of Cy* as related to the Cj at IGE under constant Cp.
CT* CT T
These are the two basic forms of the generalized hovering performance equation which will be employed for prediction. Equation (4.1) provides directly the relative thrust increase which is the main Interest In hovering performance. However, equation (4.2) Is useful in predicting Cj at an IGE value by first calculating the thrust coefficient C-j-* corresponding to the Cj at that IGE skid height under constant Cp. Thus the point for that Cj and Z/D in question can be located.
The generalized equation (4.1) of hovering performance is plotted in Figure 17 with Z/D range from 0.2 to 1.4 and C-r/a range from 0.03 to 0.14. The method of prediction based on this generalized equation Is very simple. First of all, the constants K|, I = 1,2,3,4 can be obtained from flight data and are known. Then for a certain operating power level at a specified relative skid height Z/D, the relative thrust increase CJ/CJOO can be calculated readily. The various applications of this equation will be discussed In Section 3.7.
3.5 Flight Data Required for the Generalized Method of Prediction
This generalized method of prediction as presented in Section 3.4 requires only limited amount of flight data. This Is one distinctive feature of this method of prediction. Furthermore, even with limited flight data, this prediction does not lose Its accuracy within the limit of tolerance. The discussion on accuracy will be presented in Section 3.8. This feature allows the flight test engineer to reduce the amount and the range of flight test, therefore reducing the time, manhour and thus the cost of flight testing.
In this generalized method of prediction, the only required flight data of an aircraft is that of the OGE Cp - Cj data, or any one IGE skid height Cp - CT data. From the available OGE data, IGE hovering performance at various skid heights can be predicted. Or for the case of available IGE data, the OGE and thus the rest of the IGE hovering performance can be pre- dicted. Different applications using the generalized equations of predic- tion will be presented in Section 3.7. The figures below Illustrate the
«■MMtiMMHUMtfMdlMMIiMlltfHHHllill • ■-...-,■-.....-.-■ -....

mtmm mMimi'ii iiii mp "^ ,.,,«.,.,,,.. i-.-H- »«^fw-f ' - ^«.'■ilBIII IIUIIIPU.I.II ' '!'»'■. I -" iPI.-^Mi|i;j"i'iimi
required flight data and the predicted performance;
IGE
0^/////
Required Data
Predicted performance
3.6 Suggested New Method of Flight Test: The Two-Point Method
From the functional relations of (a, CToo/o) and (b, CToo/o), it was observed that in each individual helicopter, the function relation of these two sets of parameters forms linear or very close to linear relation- ship as presented in Figures 15 and 16.
This phenomenon motivates a new method of flight test which not only will save time and reduce cost of testing as in the generalized method, but also provide better accuracy for hovering performance prediction. This accuracy will be compared with that of the generalized method. This new method suggests that, in addition to the information needed for the generalized method of prediction, helicopters be test flown at two constant power levels (C ), one high and one low, at OGE and various IGE skid t.eights. The following figure shows the flight test data required.
OGE IGE
high ■-
O Flight data requ i red
Then these data can be reduced to the parameters C /C , Z/D, and C-j. /o as shown in the figure on the next page.
mmmm mfm — "■ • ■ ^ '

BV ■"i"1" ■' ■ i" ii"i^p - i^.i.-iii.iiii.ij,i. ■,"","','";r-"*'11 ' "'" "■■I "'■■."■ ■■■IIII'IJII>
Each of the two curves is of the form Y
aX + b
The relation of a and b with C /o can be represerted in the figures be Iow:
K, + K2(CT /o) b = K3 + K4(CTco/ö)
low CT /a
high
Having these two points and knowing that the intermediate points should follow a linear relationship very closely, a straight line is drawn through these two points, and a new set of values of the constant K's is obtained. With these new values, the generalized equation (4.1) can then be applied for the prediction of hovering performance. The accuracy of this Two-Point Method of prediction and the results of 1he test cases will be presented in Section 3.8.2.
This Two-Point Method of prediction provides better accuracy than the generalized method, and therefore serves as a substitute for the generalized method in the event that higher accuracy of prediction is needed. The only cost to this higher accuracy is the additional fligbr data at two power levels, one high and one low.
It is appropriate here to emphasize one requirement in using this method. Since the accuracy of this method depends heavily on the accuracy of flight test at the two power levels, it is, therefore, important that the data for these two points should be provided as accurately as possible.
3.7 Applicat ion
The aim of the application of these two methods of prediction is to facilitate a way to reduce flight test time so that with limited available
10
-- -

_,_~.~ „,„.. ,., n u, . i . 1m.1m.HuuLi.. mmmmmnu mm.m.„uH.um..«umm.m.MMuw i.nMmmxjm.w.A.nm^mmmfm^
flight data, the entire rangi-. of flight testing can be accurately predicted. Thus, tht cost of testing can be greatly reduced. In ail cases, the aircraft characteristics should be available as compulsory input to this method of prediction. They include:
(1) skid to rotor hub height
(2) main rotor diameter
(3) main rotor solidity
The diversity of application of this method can be summarized into five categories:
(1) a. Prediction of relative thrust increase (C /C,. ), given only T T00 ^ ' aircraft dimensional characteristics.
b. Prediction of relative thrust increase (CT/C ), given OGE.
(2) Prediction of IGE pei forn.ance, given OGE flight data.
(3) Prediction of IGE performance, given predicted OGE performance by analytical formulation.
(4) Prediction of OGE and the rest of IGE performance, given one skid height IGE flight data.
(5) Prediction of IGE performance, given OGE and one low and one high power level flight data at various IGE. (Two-Point Method).
For detailed descriptions of applications, please refer to Section II of Appendix A.
3.8 Accuracy of Method
A method of this kind can be regarded as useful if its accuracy of prediction ',s within an acceptable tolerance and its application can facilitate the technical analysis resulting in the saving of time and cost. The methods presented in this report well meet these two criteria. Their accuracy is discusse' "n the following sections.
3.8.1 Accuracy of the General ized Method
3.8.1.1 Comparison of the Predicted and Experimental Hovering Performance
One way to check the accurai y of this method is to simulate the hovering performance (Co - C relationship) of the helicopters and compare the result with the flight data. The aircraft YUH-ID (with 44 ft. rotor) was chosen as i\u example to demonstrate' the accuracy of the generalized method of prediction. The accuracy of the prediction shows that in all cases of skid height, the
II
^_^31lMiaillWMl - -" — --— ■■ ■'.■-^,«n^.yil,l.a.f^.>,.,.1i.i.t,„.ir.i^.n,l1«>.^^

mmm" mmm '-»•■■,"" '. "' r~~—^—^~ "—" ■" i ■
deviation from the flight data is less than 5%. A sample of this comparison is presented in Figure 18. In order to avoid cluttering the curves on one drawing, only skid heights of 2 and 10 ft. are shown in the figure. The predic- tion on the rest of the helicopters in this study shows an accuracy all within 5% deviation from the flight data.
3.8.1.2 Comparison of Relative Thrust Increuse
To check the accuracy of prediction by comparing the predicted and 4.he experimental relative thrust increase is of more immediate interest with respect to hovering performance. This comparison can be best realized by the presentation of a histogram showing the sample mean and standard deviation of this method o.f prediction. The histogram is presented in Figure 19. The distribution of deviation is of the normal form. The sample mean and standard deviation were computed to be -0.3642 and 2.0891 respectively. The following table shows a summary of this comparison.
Standard Deviation Ai rcraft Sample mean
Al I ten he Iicopters -0.3642 2.0891
In other words, this comparison reveals that in the prediction of hovering performance considering all ten helicopters, about 68^ of the predictions falls witlvn the range of +_ 2.0891/t deviation from the flight data, and about 93% falls within the range of +4.1782? deviation for the flight data. The probability of prediction that will fall within a certain range of percentage deviation from the flight data Is shown in Figure 20. It demonstrates clearly that in order to have an accuracy of prediction within the range of _+ 5$ deviation, which is an acceptable tolerance, this method of prediction '.s 98.98% successful.
3.8.1.3 Accuracy of Prediction on Helicopters Outside This Study
The next question to ask is whether this method of predlctiori can provide the same high degree of accuracy if applied to helicopters not included in this study, A satisfactory demonstration of this method of prediction on such helicopters will strengthen the confidence In this method.
Four helicopters with recent limited flight data (except for the case of YH-41 which was flight tested in I960) were selected for this test case. They are 0H-6A, LOH 206A, AH-IG and YH-41. In al i these four cases, only the OGE and one IGE flight data were available (References 14 to 17). With the generalized equations (4.1) and (4.2), the hovering performance of all four helicopters was predicted and the Cp - Cj curves generated. The
ifun ■-■

— "■■ '■■ -■—' ' --™ ■Mi
predicted performance and the flight data were then compared as shown in Figures 2! to 24. In all cases, the maximum deviafions from the flight data based on the IGE skid height are less than 4.5$, and in particular for the cases of 0H-6A and LOH 206A less than 2%. The relative thrust increase was also predicted and compared with the flight data as illustraled in Tables XII to XIII. It should be noted that since flight data of only one IGE skid height were available for each of the above helicopters, comparison of the relative thrust increase can only be based on that one IGE skid height. The results; show that in all four helicopters and for the entire range of power level, the deviation of the predicted from the data is within 5%.
The accuracy of this method of prediction on all ten helicopters in this study and on four helicopters outside of this study not only demonstrates the usefulness and reliability in this method but also strengthens the confidence in us ing it.
In order to employ the Two-Point Method of prediction, flight data on two power levels and at various IGE skid heights should be available. At present, such data are not available, and therefore, this method cannot be readily used.
3.8.2 Accuracy of the Two-Point Method
In order to investigate the accuracy of this method, the hovering performance of all ten helicopters was predicted with this Two-Point Method. The results obtained were then corryöred with that of the generalized method and with the flighl data. In all cases, the Two-Point Method provides closer prediction to the fligf""i data than the generalized method. In order to demonstrate this comparison, the results on YUH-ID (48 ft. rotor) and the UH-IC were selected and are presented in Figures 25 and 26. In the figures only the skid heights of 2 and 10 ft. are shown for the sake of clarity. It can be observed clearly in the figures that the Two-Point Method indeed provides better accuracy than "fhe Generalized Method.
This result of closer prediction is expected because of the fact that first of all the empirical functional relations of the constants a and b with respect to C-j- / o on each helicopter are linear or very close to linear which can be seerf in Figures 15 and 16. Secondly, these func- tional relations employed in this Two-Point Method are actually closer to 1he flight data than those employed in l"he generalized method.
4. CONCLUSIONS
In this report, two methods of prediction on helicopter hovering performance have been presented. The outstanding features of tnese methods are that first of all they are simple and easy to apply. Secondly, only limited flight data are requirei (OGE Cp - Cj or IGE skid height Cp - CT
data) for predictions on the entire range of hovering performa-ce. Thirdly,
13
MUMHH rfn'i'ffwiiMUn'i I "

MPPPHMMKIiipmiii ■ IIIILUII III Mll!> 1.1 m' n — ■■ I'-JI ..i—imminii,»iWM'i".i'i"ii .1 mtwim-Mmm m'«^
these simple methods provide highly accurate predictions. In all cases tested, tht accuracy is well within 3% deviation from the flight data.
4.1 Prediction Methods
These two methods, the Generalized and the Two-Point Methods, employ the prediction equation derived empirically from a wide range of flight data. The derivation of this equation is presented in Section 2. The Two- Point Method is a movb r.pecific one which provides higher accuracy of pre- diction than the generalized one.
4.1.1 Generalized Method
This method uses the generalized prediction equation
CT Z/D
CT [K, + K2(CT /a)](Z/D) + [Kj + KACj /a)]
The constants Ki, K„, K,, K. are pre-determined from the flight data considered in 'rhis study. The only flight data necessary for the prediction of the entire range of power level is the OGE or one IGE skid height Cp - Cj performance. Once the required values of Cj /o and Z/D at which the hovering performance is to be predicted are given, ffie relative thrust increase CT/CX can be readily calculated.
4.1.2 Two-Point Method
This method makes use of the linear relationship between a, b and C /a. The constants K|, H^, K,, K. are determined for the particular helicopter in question by use of this linear relationship. Then the generalized prediction equation (4.1) is applied for the hovering performance calculation. This method reauires, in addition to +he OGE Cp - Cj data, the Cp - Cj flight data on two power levels, one high and one low, at various IGE skid heights. This Two-Point Method provides more accurate prediction than the Generalized Method.
4.2 Appl icat ions
These methods can be applied in different ways according to different given information as follows:
(I) a. Prediction of relative thrust increase (Cy/Cy^), given only aircraft dimensional characteristics.
b. Prediction of relative thrust increase (Cj/C-r ), given OGE flight date.
14
. . .. .. ...-^■.^■^, rtfU^IIIIIlT "■-, '^ : -

mm* —'"' "m^rni
(2) Prediction of IGE performance, given OGE flight data.
(3) Prediction of IGE performance, given predicted OGE performance by analytical formulation.
(4) Prediction of OGE and the rest of \GL performance, given one skid height IGE flight data.
(5) Prediction of IGE performance, given OGE and one low and one high power level flight data at various IGE. (Two-Point Method).
4.3 Suggested Data Information and Flight Test Method
Since the generalized method provides accurate prediction on hovering performance and requires limited flight data, it is suggested that the range of f I ight testing can be reduced to only the OGE Cp - Cx data or one IGE skid height Cp - Cj data. Hence, tremendous saving on Time and manhour and therefore the cost of testing can be real ized.
Should situation require that highly accurate prediction be needed, the Two-Point Method may then be employed. Since this method of prediction as indicated before requires the addition of Cp - CT daici at two power levels, a new method of flight testing is suggested in which the aircraft is to be te:it flown, in addition to the OGE range, at two constant power levels at various IGt skid heights.
4.4 Extension of These Methods of Prediction
The flight data available for this study have been limited mostly to single-rotor helicopters, However, the principles of these methods are applicable to Ihe tandem types. These same methods of prediction can be employed upon the availability of sufficient flight data on tandem helicopiers. Furthermore, if the interest of prediction on helicopter performance is confined to a certain type of helicopters, then a different set of values of the con- stants K., K2, K,, K^ can be obtained based on a range of flight data of the type of helicopters in question, and the same methods can be applied.
These two simple methods of prediction on hovering performance are valuable tools in the aid of preliminary design, in accurate predicrion of such per- formances, and in economizing flight testing. The results of prediction on ten helicopters and an additional four outside of this study show an accuracy within 3% deviation from flight data. Therefore, there is good confidence in the use of these methods.
15
iiurflriii'iirr "'- il" ■■ ■■ - ■ ■ J

I , IIIIJWWI,. .IIUWPWHI.U-IIIJ. . lMl..l|....<lliMl«. MJLMMLU.jpffllilWIWH.1 .1..I m
APPENDIX A
APPLICATIONS, PROCEDURES AND SAMPLE CALCULATION OF METHOD OF PREDICTION
This section is intended for those who are mainly interested in the working of the methods of prediction presented in this report. Description of applications, procedures, and sample calculations of these methods is the major objective in this Appendix.
I. GENERAL INFORMATION
I. Equations of Hovering Performance
This method of prediction uses the generalized equation on hovering performance.
CT Z/D
CT» CKI + K2(CT /a)^(Z/D) + CK5 + K4(CT /a)] (A.I)
which can be expressed in the form of
[K.CZ/D) + K3] r * (A.2) T [|/CT - K2/o](Z/D) - K4/o
where CT = Thrust coefficient at IGE Cj* - Thrust coefficient at OGE corresponding to the same
power level for a selected Cj at IGE. CT = Thrust coefficient at OGE Z = Distance from ground to rotor hub (FT) D = Main rotor diameter (FT) 0 = Main rotor solidity
K's = Constants
2. The Constants
In the above equations (A.I) and (A.2), the constants K| , K«, K-j, and K4 have been previously determined. They are shown below:
16
jmaM^MMM^i^^Jflatjjil^iliiBiigiMltilMtt^MiMMllBliMiilii^ ITII 'm Hin |IIIIMyi-aMitif^"^^""'"'"'".-—• .-...i,..:.!-..^.---.. :.,-.M-.. ,

HUfPMUWW" J ■PiWllll|il|p|BBPIWP»!TOii..MiiMiiu^ i I .1 iiUHWIIWipwi-—^ IIIIWWI^PIWIPIW-WIPWPW'W^^II.'-'FIII.II.UIUIIIB
Kl = i 099107
i = -0 289447 = -0 .104183 = 0 391297
These four constants will be changed if the Two-Point Method is applied on individual helicopters. Those who are Interested in the cal- culation of these constants can refer to Section 3.6.
3. Aircraft Dimensional Characteristics
The following are the required characteristics of a helicopter as inputs to this method:
(1) Skid to rotor hub height (FT)
(2) Main rotor diameter (FT)
(3) Main rotor solidity
4. Inputs to Method of Prediction
Besides the aircraft dimensional characteristics which are necessary as inputs to these methods, the user of these methods should also decide at what skid heights and within what range of Cj should the hovering per- formance be predicted. Furthermore, the flight data on OGE or on one IGE skid height should also be available as given conditions which will be described in the following paragraphs.
In summary, the following items are the inputs:
Necessary Inputs
(1) Aircraft characteristics: (a) skid to rotor hub height (FT)
(b) main rotor diameter (FT)
(c) main rotor solidity
(2) Skid heights (FT)
(3) Range of Cj
(4) Values of constants K's
Variable Inputs
(I) Flight data (Cp - C relationship) on OGE or on one IGE skid height
17
■ ■-•- - tfÜMI ""'"■■'■'"""'■' ■-■--■ ■■-•-

»■WT liljllllPIMIIlilil^^ III .nillllMIUHUUIIII.»,!!! I ^.■lWII»PM",»l'P-l»».l I 11. ^-M........ I..UIIII.II ! 1,1 ". ,,^|
(2) Flight datfj of OGE and various IGE under one high and one lew power level (Two-Point Method)
(3) Values of constants K's for individual aircraft (Two-Poi nt Method)
I I. APPLICATIONS AND PROCEDURES
These methods of prediction can be applied in many ways depending on what is to be predicted under what given conditions. In general, there are five ways in which these methods are applicable:
(1) a. Prediction of relative thrust increase (C-r/C-r ), given only aircraft dimensional characteristics.
b. Prediction of relative thrust increase (Cj/C-rJ, given OGE.
(2) Prediction of IGE performance, given OGE flight data.
(3) Prediction of IGE performance, given predicted OGE performance by analytical formulation.
(4) Prediction of OGE and the rest of IGE performance, given one skid height IGE flight data.
(5) Prediction of IGE performance, given OGE and one low and one high power level flight data at various IGE. (Two-Point Method).
These five applications are individually discussed and described below.
I.I Application (la): Prediction of Relative Thrust Increase, Given Only Aircraft Dimensional Characteristics
This is the most general and overall way of predicting the relative thrust increase. The chart below shows the inputs and output of thir orediction:
I nput Output
1. Aircraft dimensional characteristics I. Relative thrust
2. Skid heights in terms of Z/D increase C-r/Cj 00
3. Range of power levels, CT lo I 00
18
^^^MMaiill1illl*illlll»il<i1Ml.....rli.l.l,.ill->.,..--:..nl.„.

..,..■.«...I..UJUii min ji.p.iiliiiMLIii.jiiJiii i ..■■■ IMIIIin mull ■Mm—PWV ■■■■HWP11 -. w '"'n "ii I ' ■ ■"'"'M'1'"""!"«" i»i,'i»mi«nTi.ii
Equation (A.I) can be directl/ applied, and the relative thrust increase can be readily calculated.
Procedures
(1) Pick various skid heights to calculate the corresponding Z/D
(2) Pick a range of Cj /o
(3) Apply equation (A.I) to obtain Cj/C-r
This application only provides a general perspective on hovering performance because of the fact that the values of C-r /o selected may not be that for the real situation.
1.2 Application (lb): Prediction of Cj/Cjjo , given OGE
The only difference between this application and that of (la) as far as input information is concerned is that the OGE Op - Cj relation is available from which C-r /o can be obtained corresponding to the real s i tuat i on.
The following chart shows the inputs and the output of this prediction.
Input Output
1. Aircraft dimensional characteristics
2. Skid heights in terms of Z/D
3. OGE Cp - CT data
I. cT/c
Again equation (A.I) can be applied directly. The following are the procedures:
(1) Pick a range of Z/D
(2) Pick values of Cx /a for the real situation
(3) Apply equation (A.I) to obtain corresponding Cj/CL
1.3 Application (2): Prediction of IGEy given OGE
In this application, once the OGE C - CT flight data are given, all IGE Cp - Cj relations can be predicted. To do so, the generalized equations (A.I) and (A.2) are applied. The approach Is disgrammed In the following figure.
19
■-' ■-■-- —^-

mmnm*mmi*m* immm*m mmmm^m*^mmmimmmmmmmm^*'*m
j/BECSkid height)
Cj range
Let r oe any point within the C range to be predicted for a certain in- ground Z/D. The procedures are as follows:
(1) Pick a Cj within the range, and a skid height.
(2) Calculate CT* from equation (A.2).
(3) Draw a vertical line through the value of CT*, intersecting OGE at point A, and draw a vertical line through the value of CT.
(4) Draw constant Cp line through A on OGE.
(5) The intersection P of this constant Cj and Cp lines is the point to be predicted for this selected IGE.
(6) Pick another Cj value and repeat steps (I) to (5). Eventually the entire Cp - CT relation for this skid height can be predicted,
(7) Pick another skid height and repeat the same process from steps (1) to (6) to predict the Cp - Cj curve for this new skid height.
1.4 Application (5): Prediction of IGE, given predicted OGE.
This application follows exactly the same procedures as that of Application (2), except that the adcitional error source is from the analytical formulation of OGE.
1.5 Application (4): Prediction of OGE and IGE, given one IGE
This method of prediction is similar to that of the Application (2) except the logic is reversed. The following figure demonstrates this procedure.
20
^^.^■..j! -—--■■■ fuMMiiiii.mi. i i " --■•■■■--

" ■"'•- ■ ■ """■■"ll1'" "I" ' " ' "■■ mmmm"
Cj range
Procedures
(1) Pick a CT within tne range.
(2) Calculate C-|-* frcMn equation (A.2)
(3) Draw a vertical Cj line, intersecting the IGE at A.
(4) Draw a vertical Cj* line and a constant Cp line through A.
(5) The intersection P of the constant Cp and CT lines is the point to be predicted at OGE.
(6) Pick another Cj value, repeal" steps (I) to (5), to predict the entire OGE.
(7) With this OGE, predict the rest of the IGE by the same procedure as in Applicat ion (2).
I.6 Application (5); Prediction of IGE, Given Two Power Level Data and OGE
This application ties in with the Two-Point Method of flight test which will provide a closer prediction. In addition to OGE flight data, it is required to obtain data at two constant power levels, one high and one low at various IGE skid heights. After the constants K|, 1^, K,, K4, are obtained, which was discussed in Section 3.6, the hovering performance can be predicted with these new values of K's by following the same procedures as in Application (2) to (4) with respect to the corresponding given conditions.
The following is a summary of the applications of the method of pre- diction.
21
■-■■ ■^- ■ ;.^».^^:.1,:.>.^.tJ^.,^,.J-„ .^.1 .. . iriittVnjnJi-»iii;ii*'i»Jli;--J,-J

^■ii^.wfWyWiiPiijM^.^ffUHiiW .i.iyim^w.'w»Ffi-i»-Ji.P.i»w<ww|ilPJiHPllHijlWlw,^Pi. ' »JI»^.I.S'I- .m-wv.m."m.*.v„„,.,**:•*, ,.mw*.' ^.M+tmwt*i.mmwmmm)u.viwtim*lmiimm» liii';H»"i"i.i.l.'L.wV(W..-.«ii,"J^n.ii^w^^«
Applicat ion To Be Predicted
Given Conditions Special Conditions
la VCT. Aircraft Dimensional Characteristics Only
None
lb Cj/C^ OGE None
2 IGE OGE None
3 IGE Predicted OGE None
4 OGE, IGE One IGE None
5 IGE OGE IGE flight data at one high and one low power level Cp
III. SAMPLE CALCULATIONS
There are five different applications of this method of prediction. Because of the similarity of procedures, only two typical applications are presented here as sample calculations. They are
(A) Application (2): Prediction of IGE, given OGE
(B) Application (5): Prediction of IGE, by the Two-Point Method
The aircraft UH-IC is employed here as an example.
Appl ication (2)
In this application, the OGE Cp - CT data are provided.
Input Information:
Necessary inputs:
1. Aircraft characteristics: (a) Skid to rotor hub height = 12.26 ft.
(b) Main rotor diameter = 44 ft.
(c) Main rotor solidity = 0.0651
2. Skid heights 2, 5, 10, 15, 25, 50 (OGE) ft.
3. Range of CT: 35 x I04 to 60 x I04
22
mum IMMMMaMaaM IM j-rtMirlMflilt^lWIHIH ■.— ■' - ^- i-.^.— --Vn i ITII mabt -171. rtiinuff -_ ..__...-_

mm i'"'., i."-»" I'." ■'■"■■' '•"-—"^ rj;.^7,T__-_^ „ -~^^-^ pip X "-
4. K
K
1.099107 -0.289447
K3 = -0.104183 0.391397
Variable inputs:
I. OGE Cp - CT data
Procedures:
1. Pick the values of CT to be 35, 40, 45, 50, 55, 60, x I04 and the skid heights of 2, 5, 10, 15, 25, 50 ft.
2. Calculate Cj* with equation (A.2) with the above values of C and Z/D The calculaxed values of Cj* and their corresponding values of C-j- and Z/D are listed on Table A-1.
3. Plot the OGE Cp - CT data in Figure A.I.
4. Locate all the in-ground CT points with respect to the OGE curve by following the procedures (3) to (7). The result is presented in FIgure A.I.
Appi icat ion (5)
Input Information
The input information is the same as that of the previous sample cal- culations, except for the constants K's. These constar.ts are obtained from the linear functions of (a, CT /a) and (b, CT /a).
loo loo
The values of "a" and "b" corresponding to the high und low power levels are as follows:
Values H i gh Power LeveI Low Power Level
C-Too/^
a
b
0.076344
1.083304
-.079061
0.054378
1.105835
-0.091799
The linear equations of (a, CT /o) and (b, C-,- /a) can be obtained as loo loo
a = I.161612 - 1.025722 (CT /a) b = -.0123333 + 0.5799 (CT 7a)
23
irnir-^-""--"""-1' "'-•"•"'-•'- —■■'■•■*"■■-'■ ■'■■-■-•■■;- ■ i j-ni ir--—-- ■ ■

..IIII.I...I...I»-! i,. . nw-iii. ' ■ •"—"" ' — '-' ■"■■■ '■ " ' ■ ■ '" "» ' ' ■'■■■'■■■■fi.'-viiii.ii.^i.M...,i.F.iiii|p,iiii«,.i i yi .n.i nj in I.N.I IIJ;JIIIIUIIP.I-"IMIIIIIW-U I . I J ■ II I. <llll III
Therefore the values of K's are;
K = I.I6I6I2 = -1.025722 = -0.123333 = 0.5799
With these values of K's, follow the same procedures of calculation as in the previous case. The values of C-r* are lisred on Table A-11, and the predicted performance is presented in Figure A.2.
24
amtttma^^aumfämtsamanaamti'^mttrt.,,,„.,... , ■

APPENDIX 8
SUITABILITY OF THE EMPIRICAL FUNCTIONS
To simulate the flight test data, a number of empirical functions were selected. The obje~tive is to establish whether or not the function trul y represents the experimental information. One way to dete;mine the suitabili t y of these functions is the I inear graphical test.
In this test, the hypothesized function F(x, y> was rewritten in a I inear form with respect to two selected functions f
1 and f2 :
where m, n are constants
i n the c~se of the power function, the line~r form is
log y = a + (b) log y
and in the case of the first and second hyperbolic functions, the I inear forms are respectively
xy = ax + b
an d x/y = ax + b
where x = Z/D, and y = CTICT~
Then the pairs of data valuec of x andy were substituted into the I inear equation f1 = n + mf2, and f 1 was plotted as a function of fz· As long as a strai ght I ine is obtained from this test, ~e can consider th1s result as an indi cation that the hypothesized equation may be satisfactory.
The I inear graphical test of these three functions were plotted in Fi gure 8-1. It can be readily observed that the second hyperbolic function leads to the closest linear relation between f 1 and f2 . The actual plot of these three functions against the flight data for the case of YHU-18 is presented in Figure 12. It is clear frorr. the figure that the second hyperbolic function is the best choice.
25

REFERENCES
I. Knight, M: and Hefner, R.A.: "Analysis of Ground Effect on the Lifting A i rscrew." NACA TN835, 194 I •
2. Zbrozek, J.: "Ground Effect on the Lifting Rotor." British ARC R&M Nc • 2 34 7 , J u I y , I 94 7 •
3. Gessow, A; and Myers, G.C. Jr.: "Aerodynamics of the He I icopter." Frederich Ungar Publishing Co. Inc., Ndw York, 1967.
4. Ralston, A.: "A First Course in Numerical Analysis." McGraw- Hill Book Company, New York, 1965.
5. Porter, D.W.; and Flanagen, E.G.: the YUH-ID with a 48-Foot Rotor."
"Category I I Performance Tests of USAF FTC-TDR-64-27.
6. MacPherson, D.F. Jr.; and Hodgson, W.J.: "ARDC YH-40 Performance Ev~luation.: AFFTC-TR-59 - 3, January, 1960.
7. Johns, S.L.; and Co vin, G.L.: "YHU-IB Category II Perfo rmance Tests." FTC-TDR-62-21, December 1962.
8. Reschak, R.J.; and Balwin, R.L.: "YUH-ID (44-Foot Rotor) Category I I Performance." TDC-TDR-63=43, November, 1964.
9. Smith, E.J.; ana Kidwell, J.C.: "Limited Evaluation of the Bell Model 47 J-2." ATO-TR-62-5, May, 1962.
10. Kidwell, J.: and Johnston, J.A." "Evaluation of the Hiller Model UH-12E-4 He I i copter." ATO-TR-62-7.
II. Schroers, L.G.; and Melton, J.R.: "Engineering Flight Test of the UH-IB Helicopter equipped with the Model 540 Rotor System. PhaseD Fina i Report." AD 811782, USATECOM Project No. 4-4-0108-03, December 1966.
12. Tanaka, F.H.; Blafe, J.J.; and Somsel, J.R.: "Category II Performance Tests of the CH-47A Helicopter." FTC-TR-66-2, May, 1966.
13. Ferrel, K.R.; and Ferry, R.G.: "A~OC YH0-2HU .A.!r Force Flight Evaluation." AFFTC-TR-60-2, February 1960.
14. Koelle, E.A.; and Hodgson, W.J.: "ARDC YH-41 Performance Evaluation." AFFTC-TR-60-7, May 1960.
15. "Detailed Specification Light Observation Helicopter LOH 206A" Revision No. R-3, January 15, 1968, Bel I Helicopter.
26

rm^m »•l,l*JU|JII,.ll
16. Crouch, W.E., Jr. E.P. Preisendorfer, K.R. Ferrell, "Engineering Flight Test of the Light Observation Helicopter (LOH) 0H-6A Armed (XM-27EI) and Unarmed Performance and Stability and Control," USAAVCOM Project No. 67-13, December 1967.
17. Private Correspondence on AH-IG.
27
mmtmmmm* —i— ■ ■••■■ '• i

(P^BP1I^IIUIWIUIIIIII,PW»"<IHJH""™'«I"W i",""!u<"i»"«ii|iuniiuijijiJ|iraii.iiiijii|i 11.-1U .«ii»i)>ii'iini.i..<p,'i.' , i-Jin.. niij^piiiiiii tnij.'nM«^".«'«»»«'.!^»!-« uii'",«'««wini ."J > vi.umim mi-.miw-'ur^J-mi'wim«'"-'^
SYMBOLS
Cp Ro+or-shaft power coefficient
Cj Thrust coelficient
CT Thrust coefficient at OGE under the same power le/el
C * Thrust coefficient at OGE corresponding to Cj at T IGE for the same Cp
D Rotor diameter (FT)
IGE In-ground-effect
OGE Out-of-ground effect
Z Ground to rotor hub height
a Rotor sol idity
28

pnw<«^||i^n!inii*qpin"<wn>PiMlf<!«mn4««iuii>wi<|Jw ... ~ ■l<n.!.i|Wi«.<lllll|Ul.ii I ^iiiiü.lll.l ^«il|p;i|i*,L i Wiv^? w.v^i iiiinup»
TABLE I
AIRCRAFT DIMENSIONAL CHARACTERISTICS
Aircraft Skid to Rotor Solidity Rotor Diameter Distance . Ft. Feet
Single - rotor
47 J-2 (Be U) 10.12 .0316 37.125
UH-I2E-4 10.125 v0343 35.333
YH-40 11.0 .0362 44
YH0-2HU 7.917 .0430 25
YUH-ID 11.96 .0464 48
YUH-1D 11.96 .0506 44
YUH-IB 12.4 ,0506 44
UH-IC (540 rotor) 12.26 .0651 44
CH-54A 18.583 .1021 72
Tandem
CH-47A 18.583(1) .0620 59.104
(1) to rear rotor
29
■^MMMMHM ■ - - ■'i",';-'',-t'" ■ ■ rüiiiftniiiii "^ *■ —t^-.- v.^..

■""■"a—y ■ "- ■■'"■■"■■■•■■■'■—^ .i.'O'wi.iiiiiiüwiip.omi.i-iii.i ■...n IT~~ 'JI|JI.IJIJ<|I1UII|IJ.|I.I PWBj^gBppipwwppipiljplWwwwiii|iwiiiy)»pwii|)pp»p^pj|»^i|Mp|
4-'
.4 a 4J 0) 01 H
J3 n) H
CM
■-I
O
O
CM CO
CO
1—1
00 f—<
CM i—i
00
i-J en
00
i—* o CM
CM 00 i-J
—-4
CN CO 00 1—4
1—4
iO
m m en
o
O d 00
vO o p—(
1—1
m CN en
vO o o
m
CM i—l
i—i
en
<N
CO •
rH
OO p>l 1—4
2 t-
d
r--
00
vO O i-i
r~4 00 m O i-H
in
n m o 1-J
1^.
in CO
CN vO O i—4
00
CO
m o f—4
oo
CO
vO o o »—I
lO 1 '"*
1—1
vO m o CM
o en cn
o i-i
CM CO
m O I-J CO
CN PO O 1—4
00
vO PO
l/l PO o 1—4
oo
oo CO
o 1-4
1 o m vO
o
vO • CM
oo 1—1
o 1—1
oo r-l
o 1—1
<N
CM
CN CN O i-4
en CM o i-4
vO PO
00 1—4
o CN
00 PO
CM CM o 1—4
00
d
CM
<M
CM O O .-i CVJ
CM o o 1—'
i-l
CO
s i-H
en CO
o f—4
m m PO
o »—4
m
en
in
O r-t 1
r CM 00 o *-4 CM
o .-1
o in
P-4
CO
o 1—1
CO PO
o 1—4
m m PO
o en
PO
o i-4
1—4 CM
o 1—<
>*
CM
o 1—<
m i—i
CO
o f—1
vO
PO CO
o 1—4
m m PO
o (—4
PO
en o 1—>
CO
Q
N
O «—t
X
H O
1 u
H u
o
X
8
H
o i-i
o
u
H
O i—l
X
H O
1 o •—4
X H
o
H
O 1—4
X
Sä H u
H u
CO oo m o
m o {
00
o
>* CM r^ O
m vO
O
P0 I o 00 i O 1
in o
x ! &-
o CM
CM CN !
vO CM
00 CM ° 1
30
i—i ^'■-•■"■-•■■■■■—iim-ir-ici i ■ i^ii'. »I■.iv i.^^_,;^^

ipMu i. jijju.pmpiiiip(iipi vnmimmm ^mmm^mmm^^^" maim «mmm'nwim'm'*
Table III UH-1C Test Data
Cp x 105 onco/r
Skid Ht 50 (OGE] 25 15 10 5 2 j
Z/D 1.415 0.8468 0.6195 0.5059 0.3923 0.3241
30 ,Q3kk CT x 10^ 35.4 36.0 36.9 37.9 40.1 43-5
CT /% 1.0 1.0169 1.0424 1.0706 1.1328 1.2288 1
32 .0576 CT x 10k
37.5 38.1 39.0 40.1 42.5 45.7 |
CT ' CTa> 1.0 1.016 1.040 1.0693 1.133 1.2187 1
3^ .0607 CT x 10^ 39.5 40.1 4l.l 42.2 44.9 47-9 j
CT / CT«» 1.0 1.0152 1.0405 1.0684 I.1367 1.2127
36 .0636 Or x iok 41.4 42.1 43.1 44.3 47.2 50.0 |
CT / %* 1.0 1.0169 1.0411 1.0700 1.1401 1.2077
38 .0664 CT x 10^ 43.2 43.9 45.0 46.35 49.3 51-9 1
CT / CTO. 1.0 1.0162 1.0417 1.0729 1.1^12 1.2014 1
ho .0691 CT x 10^ 45.0 45.65 46.9 48.3 51.3 53-8 j
CT / CT«.
1.0 1.0144 1.0422 1.0733 1.1400 1.1956 1
k2 .0716 CT x 10J| 46.6 47.3 48.6 50.1 53.2 55-7 j
CT/^ 1.0 1.0150 1.0429 1.0751 1.1416 1.1953J
kk .07^0 CT x 10k 48.2 49.0 50.2 51-7 54.9 57.5 i
j
cT / CTä 1.0 1.0166 1.0415 1.0726 1.1390 1.1930 1
h6 .0763 Cm X 10^ 49.7 50.55 51.7 53.4 56.5 59.2t) |
CT / or«, 1.0 1.0171 1.0402 1.0745 1.1368 1.1922
31
— ■ •- ^iWHlrfViili-^ajJiiiJiaia^Maaiiimifaln^, v,,i' i...^.-.-^—....-^ „«.. ^ 1„l

\im<t»»miu)t\miwMmmmimmfmm !PlWPl•llJl^ll»"l!»lM'^.wl.il^l.l•llll^lJilWlu^■«|^ln■M.^l!WPl'!^l,gp■■^llW:l"lllP,J«^Tl^'".|,■,"«|J|"■.■' fM«imi»*!«"'|.i|w>|iiw.iw!.iiii.w.,«w.|."i,"»'iii,.|^i«
rv m ll. in
CN cn
• o
ON • m m CM
• r-l 6
7.3
1.20
CM ON r-l
-—1 vO 00
ON r-l
O i-i
vO Ov CO
O
m
m
i-l
i—i
i—i 64.7
1.15
8
CM cn r-l
r-l
ON
CM 00
r-l
in 1 1 o OJ
m • o
• o m
o l-l *
t-l 60.8
1.09
O O
O 00
CM oo o r-l
fl) (0
o m 00
m o o
vO* vO
00 «M O
O CM
o Q o >* I-I in r-l r-l
m r^
4J
« H co oo <: >* 1
o m • o
in •
VO
r-l o •
1-1 56,7
1.01
m m vO
o r-l
en i—l o 1—1
o
> M
0)
m vO • in
o «
1~* 55.8
1.0
00 • o
1—t CN
o r-l
^ ^J
H
Q i <t 8 2 oH
•-4 J* r-l
8 H
N X -N, X ^ X ^ X
oH uH H H o H
U
H
1^ >* o
«a- m o m en vO O
1_. - _
CM r-l
o
in o I-J
X 5 o in
o vO
o cu o
32
-^--'^-'^"■'jiniiii-ihiiirliirJ'-'---,'---~"--"'-— ■

r ■™«™- IW«WT'JW1WH!«WW '"■'■■■"'■'i"" ■ll111 '- UWimWix- I - ^umpiBPpi
to <u H
<
I a o
> 0)
I—I
(0 H
m o •5 d
in ON
o in
in
i-4 -* m
vO
1 m
m
in NO
o CO
d
CM in
in
00
00
f—1
m CM m
CM
•-4 ON
vn
CM 1 CO i
* 1 f—1
I 0
CM vO
d
in
O H
in
vO >*
in oo O
o
i 00 o
in • m m
in 00 \ o | —1 1
! O -*
CM ON ON
o
00 •
o> en
in CM O
ON m CM O
m m CM O d
in
00 CM j O j
1 o CO CO
—•*
o ON
m o O ■-I
o en
o o r—(
o o 1—(
vO
ON
in j
o 1—t
o
i o o CM
oo
oo CO
o r-1
00
CM o f4
NO o
ON o j ■-4
as
1 CO
P o
X
H O
3 ■—,
H
o
X H
8
H
o f—i
6 o X H
O
u
H 0 1
? vO tM vO O
CM ON vO O
00 "* O I • 1
ON
o
! o CM en
vO CO 1
33
M.^ — '-■■■■-

m^mmmmsimi -'"-"^'■--'^"^■i m Hl in .lUiuiiuivaiflllilipilllJlUM] mm.,m^,Tr,.,,m>m •■ ■7i>rf-i|i^ _,,.-,„_ ,^..-r-__T„^1 pp^j^ppp^p -—-
1
o
(0 dl H
O
>
ja cd H
oo 8 CM
d oo •-4
—4
ro
ON 1—4
i-4
00 CM a> i-4
1—4
in
CM
•—1
ON
oö 1—1
i-4
in
in
in
i—i
oo oo
o 00 CM
1—4
oo o 1—1
co co
vO oo O
1—4 00 CO
ON o 1-4
P0
CM"
m 00 o • i-4
co m O
i-4
1—4
ON
CM vO
• i-4 |
1—4
o
o
O
CM
CO o
(—4
o 1-^
r—4
CN CO
o- r—*
PO
in PO o r-4
vN i-4
o 1—4
CM O O • 1—1
o 1—1
vO PO
PO O • i-4
d CO o 1—4
1—4 CO o 1-1
PO in CM O 1—4
oo vO i-i
o (M
d vO
in PO
m CM
m PO
i-4
in PO
in i-4
o 1-1
o o i~4
vO
PO
CM
ON PO
in i—i
o i-4
in o o fM4
CM
CO >*
CTv
CM
i-4
o .-4
\o r-l
•-4
oo 1-4
CM
oo
d oo vO CM
CM O o
o
1—4
1—4
C0
o • 1—1
CM o o 1—4
-* 1 O i o i 1—4
00
CM
CO
CO • o vO
CM
o 1—4
1—4
<JN PO
CM O o
in oo CM
o o CNl
VO >*
O i
i—i i
s 0 oo • 1—4
u-i
H
H CM
o 1—4
o • 1—1
o
7 H O
1-4
in co
O i-i
X H O
o i-4
1—1
ON PO
o 1—4
oo CM
o CM
vO o 1 1—1
■1J
CO
Q
N
O i-4
X
H U
H
o 1—t
X H U
3 O »-4
3 u
H U
O
X H U
5 o
H U
o r-l
X H u
■r
u 1
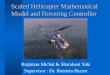
O
IT oc a
O
ON o
O r-4
CM 00 i-4
i—l
in i
CM 1 i—i !
1 "^
i i-4
X
ü
o CM CM
oo CJ
CM CO fO
O i "* i
': 1
34
..11.—. — .. ^J—^. j. M^M -—JMI -■■■

«.uiiniimi. IIIIJ.LI!KJIII.I
iHmiww—I
1
|
!
m o n o
O in o CM
m
vO >*
CM 00 ■4-
CM O «—l
r-l
CM
CM m
oo r-l
r-l
i-i
-* m r-l
• r-l
m in
m r-l
r-l
r
m
m CO
o
1
vO CO
CO CM
■r-l in
CM r-l
• -I
CM CM r-J
r—1
• r-J
o C^ o r-l
CM m
—< l—l
r-l
o •-1
a. o in
O
f- i o f—l
CN4
o
•->
CM
cn
in
o • o
cn \o o r-l
00
CO o r-l
d cn vO o
n) ■u nl O
09
IT»
CM CM vO
O
o en
o r-l
d o f-l
CM
>* o r-l
00
m >*
in cn O
r-l
m cn o
•
cn
d
1
cn o
•
H
I U1
O m oo
o
m o o 00 CO
00 o o •
<jv
• O
o o f—1
vO
3 o 1-1
r-l
o r-l
o •
oo o r-l
M M >
ja «d H
ITI
CO O
in
vD CO
o oo en
CM O O ■—i 5
o 1—4
CM O O
o vO
o •
r-l
o o l—l
i in
m o en
m
vo o •—1
^0 •
00 en
o *-*
vO
o o CM o
r-l
o vO
o r-l
o r-t
u
•H
Q
Nl
r-l
X H O
3
H
>* o >-* X
H H
o «—1
X H U
U
H
>* O i—i
X H o
H8
O
H U
I-* o f—1
X H O
3 u
H
1—1
1 ^ 1 f-1
u
5
H
u
CM CM
o
en
O
CM O 00 O
'
cn
oo O
r-l C^ o
1 "■*
! o
m o
o
o CM cn m
oo cn 5 CM
35
-"—....J....... ..■

IBPWlWiipP'JBIIPBWWWTOW'SIWilliH^^ !i.w.i,iünnpiijpni|iijj|piJip<wiiii«.mi|iu]i|ui.M.iiiii.iiw.i iiiii.ii.aj .mmm^mi
I
>
XI n) H
CM en
O CN CM
m CM
cn CM
oo CM
H CVJ
• •
i-i
n
CM CM
r-4
CM
>* m
CM i—l
CM
r—4
U1
oo O >* • o
ON
in
'2 CO
CO CM
CM r—(
cn
^o CM
O OJ H
H oo CM
m r-4
1—4
00
CO 1—4
r-4
O
CM
d fl
ON i-l
^-4
O r-1
CM
CM CM
00
o O in CM
-4-
O
CM
in vO O •
O
o CO
00
o
o f-4 00
o
in •
00 »—I
oo CM o
i—(
CM
s >* CM
M3 OJ O
H CM
o r—1
o ON CM
oo CM O •
w o o
o <*
m •
o 00
o 1—1
OO
CD CM
o LA
OO 0J
• r-4
m (M
o • 1—4
CM
00 CM
o
u X o
o
X
H
3
H
O
X
H U
H o
H o
o
X
H O
e H U ~-
H U
O p-4
X
H O
H
O
X
H
8 H O
H O
.b
/ m o
00 in vO O
4- 4-
O
CM 00 O
«M ON oo o
m O i-i
X
Ou U
00 1-4
O CM
CM CM
36
I^^^^^M tMHa^h^L*^*^^.,.^.,^....-^^..-.:..-.

vmmmmmmmmm "- ■ ■" ■"■■■"'- »■^WWIPWSWMPP"«!!» "'' —. ' '« ^
33
cfl H
vf m m -4- m CM CM 1 •* vO CO -* tn r-l n oo cn en m* H • t—t • 1—1 1
CM « r^ • O m • in • 1 o CM r-l
CN
m rH n i—< m f—1
00 O <N CO 00 o 00 vO 00 i-t oo 1 <r O o o • o
l/l vO o> i—l vt o CM 1—4 CM H cn r-l CO r—1
m H in r^ CO -* (J> J- >* <f a\ >* o in • o • O o • o
r—1 • m • r». • o CM • o c^ ■-( CM rH en l-< CO pM|
CM CM ON in in vD ^-1 rH o in i-H ON r-l
o 00 • o • O • o • O CM • ~* • t^- • (Ti I—1
o <N ^^ CM H CM f—< CO •—1
/-s m m u cn oo CM vO
8 r^ • o • O t o • o • •* • vO ON i-4 • r-' CM F—1 CM r-l CM I-l en t—*
o 1 "^ >* % •* 6 <* 3 <J- ft >-> O H O H o O H X
Q i—i O r—i O f—1 u p—i U
•0 X ■*^^. X "^^ X "*^. X ■,^^.
■^ N -^ H H H H H H H H M U O ü O O U U O
Jo 00 c> J r 1 i-l
O 0 5 u- I CM
^ t^ r- a ) Oi o c 5 c ) O
u "
i in o .—1
oo c 5 JN i <* i x »-4 ^ \ JN 1 CM
i ft- u L .
37
MM mgdynugmmgui —^ , -■ ■ ■■ •;— ■ ■- ■■ ■ ■ -^"■' ■'-

r ---a^—y ■ ii-ipwp«i.niMH'iiii»T»»pnnw»n'»w..-i 'ii)jiii,.iiim,i. muiimi n i H.il|i,||,l.ii|l.tll|ll..il...,||..«,1..lJHl|Pill,|l..l,.i).|lll|IIH.I imv... I IU|I.J.Il||IIJf.tlHi| .II.HIH,» IM^IIW»....!..... ..,,
CO -p
&
w i>
EH
CVJ
o
X
g
CVJ
o
d no
on
o H
^ 1 •
on CVJ o
• CO
VO
H
H
CO
Si ON
H ! H
LfN • IA
00
H
H
00
d OJ
o H
H
ON
m o H
ON on o H
IA ITv
CO -4-
on o • H
H
CO LTN
ON on o j
no CO
d O • 00
0O
H
8 ■
on -4-
ON MD o o H
H
4-
VO 00
8 • VO
d LTV
o o |-^ o j H
h m o • o
^d
CO
8 H
00
H
8 H
on
on -4-
on OJ o o •
VO 4"
O • • O LTN
O
H
ro •
H • O •
rH
VO O
H
OJ
on
o • H VO
4-
o d
o | H
w
•rl
P
-4- O H
X
o H
X
-4-
X
El Ü
k6 X
o
4-
X X
r
4-
X
c5H
X |
1
J o 00 o •
r c c c
H Vi
3
I
O 0 ! H
a ! c
r
1 1 VO H
1 H
o 1 H
00 OJ ! on
O 4-
-4 1 -4 |
-i^-l^-^^._„1..,.>Ji*

wnMPPPWJniiwiMwn mmmtmn^mmmmm
as n
<V
o o
i
a)
— _ -1 1
1 i I CN 1 «A
to «^ rH ^O
rs i H sO
to vO H -st
H
sD H
in vü O H >t
ft vO H
I •
0 r^ 1 * *
rH KO HO H 4 H 00 H rH in vO
H
l
en CO CM HO'
H CÜ CM ir> H tC
CM to CM H ■'
CM t •-*
m CM CM
O H 0^ * 1 • *
i ITS in
• • 1 • • •
IM rH 00 H CM
-4- »r> H
! in rH 00 «n \ vs
( 1 HO
JO
Ü r-
Ä 1 CO
IOC to
> O t-
to
to i \ •* \
to H O CM
en
to J o !
1 *
r r ' H C
Mr - 1 H 1 Ö | H •>*• 1 H 1 C-- 1 rH :
in ^ !
o i rv H Ü r-
CM
HOC
o to
3 O 0> O 1 i-H o * i * * *
O C 0
w H r ^i r 11 H h '1 H H in M
1 >n "^ i 1 1 1 1
00 rv
rv o \J Q r
in
o HOC
0x
H
^ C '
H
H ^ O .7
.018
1
.85
.019
9
i * ON
| (
■^ to
0 rH ; 'i M y- n H £ •4
H O 1 H 1 C m \ u
^ 1 rH 1
m ! NO
CM
^^ ! o 1
*r> o < > 8 1 1 1 H O r
U 1 i . 1 • It
■OH 2: ^ m H > ^ M O rH f in ! 1
n r-H n !
w O i
CM o to o 1 rn o ^o o CO O X) 1 o • i «
^ M * *
vO H i r ^ H 0^ H i
CM H
HO O H
-* 8- O H HO
O i H C | H O ^ - i «-•• o
X \ X \ « r\ x -v . | X Kv x p\ 1 rO 1
O O O O o o ü H H H ) O CJ
E-H C-H o o
U- L_
? • *
vO I VA to
* s •
^ 1 00
• 3 ! H
*
1 T
i ^ G r-
! * O
^
00 y ^ ' ^
u k 1
1 ,
39
»■^Hiifiir-iiifinn

mummmm " "■' - --■ - '"— '"■, wm" - yRtn
TABLE XII
PREDICTED RELATIVE THRUST INCREASE
BY THE GENERALIZED METHOD
Aircraft CpXl05 y^_ Z/D (C
T/C
T«)D (C
T/C
TCO)C /
0H-6A 30 0.0684
32 0,0730
34 0.0770
36 0.0807
38 0.0841
40 0.0873
42 0.0904
44 0.0934
46 0.0963
LOH 206A 18 0.0614
20 0.0675
22 0.0731
24 0.0782
26 0.0830
0.4444 1.1183
1.1058
1.0979
1.0957
1.0941
1.0905
1.0894
1.0866
1.0859
1.1049
1.1016
1.0987
1.0960
1.0937
1.0914
1.0892
1.0871
1.0851
1.213
0.381
-0.073
-0.027
0.037
-0.082
0.018
-0.046
0 074
0.4067 1.1146
1.1151
1.1163
1.1242
1.1287
1.1309
1.1257
1.1210
1.1167
1.1126
-1.441
-0.942
-0.419
0.672
1.447
(CT/CT^D
(CT/CT^)C
flight data
predicted values
(CT/CT^D - (CT/CT»)C
(CT/%)C
40
_*. 1 ■■■ilnili Hi imtthlii tiiimifii' fi

,M,yl.,,,,1.t,^.JJ.. liUMil(iVfniw>4 li|illiili.l,».!.ir ,__..._,„ IIIHHJIUJIIIIII.J .lll|l:IL,.lnl^.n|]H]iliii.l.J|,iuli| IU.H1I.IIIHHII I
IWIJIWiill W|U(l PIIIIHI IMIIII llffl II« Ul Jll^lW
TABLE XIII
PREDICTED RELATIVE THRUST INCREASE
BY THE GENERALIZED METHOD
Aircraft CpX10:
AH-1G
Vr Z/D (CT/C^)!) (CT/CXP)C
26 0.0552
30 0.0624
34 0.0686
38 0.0744
42 0.0802
18 0.0801
20 0.0873
22 0.0940
24 0.1006
26 0.1067
28 0.1124
0.3086 1.175 1.2261 -4.168
1.1671 1.2156 -3.990
1.1723 1.2068 2.859
1.1753 1.1985 -1.936
1.1740 1.1904 -1.378
1,1494 1.1733 -2.037
1.1245 1.1643 -3.418
1.1093 1.1561 -4.048
1.0975 1.1481 -4.407
1.0920 1.1407 -4.269
1.0904 1.1340 -3.759
YH-41 0.326
41
■ aiiiiimiinfc¥

^rnrnrnm***"*™*^ 1.1.1,1. I I I»", Pl.-ULMWH. I pp | . ,- ■ir.lpiwwW.l.WillliüWHIiUMi.H|l».Wi,. wiii[iiWI|lllWII'Wff|!7l>WWIH!^^i mimmn WPIPHWIJWII.F^I.I ui' ■ i.i. i HI ■■«iHiii.Biiqq
EMPIRICAL EFFECT OF ROTOR HEIGHT ON
ROTOR THRUST AT CONSTANT POWER
Figure 1
T/Ta,
2.4
2.2
T = Rotor thrust within ground effect
1^= Rotor thrust at OGE
Z/D
A 2
" -^ L ■'■ ■—"-"- -"-jj i t ■■'-'^-—■^ ■--•■'■■ ----^■"^-^-^ ■.■„■.--■ -»-Ufcl.i-.W..A.l..>w^-.:.:,..,..^...._,,.J.t.,^..,,. ....,.;.,...,t ...„ ,

1.50
1.45
1.40
1.35
1.30
Cf/Cj^
1.25
1.20
1.15
1.10
1.05
1.00
FLIGHT TEST DATA
Bell 47 J-2
I
0.2 0.4 0.6
f 0.8
Z/D
43
1.0
Figure 2
CTjV
0 0.0570
□ 0.0658
0 0.0744
A 0.0820
^ 0.0892
T72 *rr
iMihiliiiiiMiiiiiii^ ■

^^^^^^^"
FLIGHT TEST DATA
UH 12E-4
Figure 3
1.45
1.40
1.35
1.30
C-T./Cf
1.25
1.20
1.15
1.10
1.05
1.00
t
0.2 0.4
9
0.6 0.8
Z/D
44
cT It
0 0.0708
□ 0.0783
O 0.0853
A 0.0921
1.0 1.2 1.4
EM^^UM ^^e^m*imimmmmmtm-\ ^J-^flLJ^^..^..-;.::. -.^..■;...:-...-1.....:.:.^..J:...^..l-..l. „ ^■. .

I Mill | I II liUmmillllimipjIipWIIJU I .11)111 III II 11.11 ■! , II ■«W«MWWff«^^Pll"l""^,IV^-TOWV»g.^ WW ..■*»»»l|!"!f<WJ-»ll"'g,^"»'^WWI^M»W|
I.5C
1.45
1.40
1.35
1.30
CT/CTfl
1.25
L.20
1.15
1.10
1.05
1.00'
FLIGHT TEST DATA
YH-40
Figure 4
t ^
0.2 0.4 0.6 0.8
Z/D
45
1.0
c^/d-
o 0.0738
□ 0.0856
O 0.0970
A 0.1077
^ 0.1182
O 0.1276
1.4
mitea „..„„-^•■■^■■"-^-"-.^-^"■^-^■-^•-■■■■■^■-

w^—__., -, tmm
1.50
1.45
1.40
FLIGHT TEST DATA
YHO-2HU
Figure 5
1.35
1.30
Crr/Cp
cTJf
0 0.0830
□ 0.0921
O 0.1005
A 0.1086
Q 0.1165
1.25
1.20
1.15
1.10 I
1.05 ft
1.00 0.2 0.4 0.6 0.8
Z/D 46
.8 1." 1.2 1.4
■nimWiillln'nifi I iiinn-—-^-""-»-■-v...- -:.■.., ..v.—^.,.-.... ..

pp IM . iMi»iMi)MFiii'WUj|--H.fJ| .^i^Jji'^^^'.^^^^'-H» |,■|i||yulwl■lflW^J^Jl^l|^lpl^|JJ]JlJP^^p|'til^^^'»||■^,^WTO,lw^l ■^?vrm*m*Wm**!vm**'***v***'w^^
FLIGHT TEST DATA Figure 6
1.50
1.45
1.40
1.35
1.30
T T»
1.25
1.20
1.15
1.10
1.05
1.00
YUH-1D (48-Foot Rotor)
f § t
0.2 0.4 0.6 0.8 -fr
v o 0.0584
9 0.0634 O 0.0679 A 0.0724 k 0.0765
<3> 0.0804
1.0 1.2 1.4
Z/D
47
^M,^^^..^^^^.^...,^,..,.^.^, .,.. .„^.^ ,. M|,

11 ""«■■nil« ■ ■iijHimmn ii in, ii .iimim uy 11 JH ,i wm^npmPmnpinwwtkW'M.iiwmpiwiww.« wm».ni»ipiiwnniiwi>-«w"«("ii«"" mi.» lUiniiliinmiill
FLIGHT TEST DATA
Figure 7
1.50
1.45
1.40
1.35
1.30
cT/cT<!p
1.25
1.20
1.15
1.10
1.05
1.00 L
YUH-1D (44-Foot Rotor)
i
s
0.2 0.4 0.6
cT 16-
0 0.0716
□ 0.0787
O 0.0856
A 0.0922
A 0.0984
a 0.1044
0.8 4 1.0 172 1.4
Z/D 48
aaüft^iu^—iJ>Mi IBIIM i i M ■— ^..*,^^^.;.. ...■.-

mmmmmmm mr^mmmmmmmm^mmmm "" "■i wmt
1.50
1.45
1.40
1.35
1.30
CT^CT0
1.25
1.20
1.15
1.10
1.05
1.00
FLIGHT TEST DATA
YHU-1B
Figure 8
§
I a
± 0.2 0.4 0.6 0.8
Z/D
49
cT l r
0 0.0721
D 0.0763
o 0.0802
A 0.0874
A 0.0910
O 0.0940
1.0 ♦-
1,2 1.4
■MM i MI ■--'- -- -■■- mm - ■ ■■ " ...i ~. —/.. ^ ..^-^..^ L. ..,.■-^■;. T, . ...■.,.—^..—1.-..:.

w*mmmF** wM^i \mmnM*\mmm\mmm"n\i *'\n*m^m*mm*m*^^w*mwmmw. iui^ m D i,i,.nwwi!iiMJiiPiiiiMiJiiiuiJi.iMmm m\m i ipiiiiiK.immiipww)^^" d^iwinpni^w^PwmsBi
1.50
1.45
1.40
1.35
CT/CT
1.30
00
1.25
1.20
I. 15
I. 10
.05
1.0
O A
FLIGHT TEST DATA
UH-1C
«
t
cT</<r
0 0.0544
A 0.0607
□ 0.0664
o 0.0716
A 0.0763
0 0.2 0.4 0.6 0.8
Z/D
c;0
1.0 1.2
Figure 9
MUMiMMiaiHIMH lliiHHliiMminiiili i ..- ,,i, IHIUK... T! iiiitM.riii i ^li*M^Ml«äfiiii(^'-'-u"'"-'■—■■■ — - ,. Ldi

PPWBlBpipiPPWPPWipWIWW!* " mmmrnm lupHHn^^n^nnpnniHmRram^
1.50
1.45
1.40
1.35
1.30
CT:^cTce>
1.25
1.20
1.15
1.10
1.05
1.00 0 0.2
D 4>
o D
FLIGHT TEST DATA
CH 54-A
Figure 10
o
i i
v o 0.0448
D 0.0547
o 0.0635
A 0.0712
0.4 0.6 0.8 1.0 1.2
Z/D 51
1.4
i i Ü i .dd^Huaa^.a^.fci^.lMiit.^,.^. . . ..... .. ... ....... ,. . . ■■■■.■.■'*^-iuIMm,nMM-~~ .. -.W-.. .. ^ .. ■

nW>.i,ii>i<wWjjwl.Wijii,iii.VHililiuijiiii.<ii<i>>i>i»iim.*Mw<i!JF<iM<Miii.i-ii.iiu|iniiijqiin< iMPip«i»"iw iiuiiipiii jiiijijii.iiijjinMKiraminiipnncnpmmimnw
1.50
1.45
1.40
1.35
1.30
\*rr%/ Qrr, CD
1.25
1.20
1.15
1.10
1.05
1.00
FLIGHT TEST DATA
CH 47-A
Figure J]
o 8
0 0.2 0.4 0.6
Z/D
52
4 0.8 1.0
cTjc
0 0.0626
□ 0.0690
O 0.0747
A 0.0795
«- 1.2 1.4
MMMMflMMMMMMIKiMMIIWM ■—■-'""--'' - -■-- -■■•■■■■ '■ - ■

nROTMpnmnmiiiiML i ii iiiliiu iig m in i i IUIM ^^»«»^^nwi^^iip imig .» 1 - ■",l m ' • I w -"-"
I'j^ijrc \/
COMPARISON OF MATHEMATICAL FUNCTIONS FOR SIMULATING FLIGHT TEST DATA
YHU-1B
1.32
1.28
1.24
Y = CT/CTcp
1.20
1.16
1.12
1.08
1.04
1.00
^Jf = 0.076 3
O Flight test data
b A: Y = aX
B: Y =
C: Y
aX + b
aX + b
1.:
■IJ""-—'"--"■-■■"- - - ■-

HMpmpmi iwi"wi«ji.«w>»i|«»."*«FP"*i«."»»»'"-"tJ"»»w!WBm>«p»(p(i!w«ijiii iiwi.iiii|jiiui.«iiinii«iiiji*.iiii|iiviu. iiiiii. iniiii.iidiiiiin im JIMIIJ iinpiinipnnnTnP ii»«j»)yiiiw»,,Wiw ,*i»ii^iip
NON-DIMENSIONAL HOVERING PERFORMANCE
YHU-1B
Skid Height = 60 Feet
Figure 13
58
54
50
46
m 42 o
u
38
34
30
26
22
Rotor Speed (RPM) Density Alt. (FT) 323 314 290
0 ^ ^9 10, 200 - 11,860
A A -A 2,300 ^ D X 13 3,800
NOTE: / 1. Closed symb
free fight 2. Data flown
than 2 knot
ols are hover
In Less 3 of wind y /
32 36 40 44
CT x 10
54
48
4
52 56 60
.^ ^■■^■■„-. :.,...,^._.^ ..,.,... ..„.^^

I.IIIIUWW H Jin » II I, , ■IIIMJ.II.JH I, II —— ii i an. 111 ■ ■■.i inn HI.,... ....<...u , ui . im wa^^mmrnm/mm^mmimimmm»
EFFECT OF DATA SELECTION ON
LEAST SQUARES APPROXIMATION
Figure 14
YUH-1D
cT/cTfl
1.00
CT /(T = 0.0634
O Flight test data
A: Excluding data points for which Cx/CT * 1.0
B: Excluding data point for which Z/D = 1.5
C: Including all data points
o
I—IIMMBIBÜl [ *— —- - - ^--•-'---••J-1Minii|-|iiinilllJtoirM'. i runi uriiim 1 r

mil. i. j.ui.HTMillniliyil.llimi.l |l| t r—■ u n I upm^» JUM^JP I IH HI, fm ■■■ll ■^■|'»"■--■ ■ ■ WHT^mW . '"Mil" -J i-H'. ■ ■■ >.W\mi H"!!'! I I M^J-T'l'».»-i UH H»iai^|WIB»» •**Tw****i**i*^*'*mm
Pi Sure 15
ip s.^
^ H
U
b O
(fl § b M O H
g t5 pL| f4 < > ^ in TD ra O c
(D b ?; O o M H H M 3 b 03 M w ■« U H CO | a B-
en
+J <4-l
00 1 J- ■*
\~s -- < Q S Q rv i-i OJ 1-4
^r l PC
1 o Ä
X 1 g 1 ■H O
ö a o o o
OJ
•-3
t^- ^r J- w <
CN ^• o r-i 1—1 m ^ ^ § a g
PQ
o □ 0 0 ^
o
O 00 CN
O
I
r-v O rH ON ON o
II
i G>
o
o
o
00 o
o
in O
b \
O
56
ON « o
■ MHgaHMriHMgMMM riM^ttMÜiaMl ■ i.■!■ in i a —i

mm m '■'■"■"i>" ■ i m^mmmmmmnmiimmm llPtHUJjpiHIJIIIIillllllll IJIIH|IM|
1/1
o
s SIS § f M Cu
co
o CO
< Q § Q t^ i-l CM rH U
1 i SO 5
CM I
it CN
O Ä •
^ ? g
^ a e> o <a
< in
i % C5
O l-l
o □ 0 0 ^
Figure 16 d- rH
> CO t-l
H O v-"
l^. o\ CO tN r-( rH (^ CO
O
+ CO 00 rH rH iH --f o
ON
O
N
o
O
O
in O
4; o
en o
3 I
m o o
fv. o
00 o o
57
MH^M^MMtt -■■■-;^^--'^';^ -—---■--■■■■-

Piwppppwppiwwppawi»'.« immmmmmmmmm »PBIpqBPiKpip^^w' i Du ii, in-mi i,I», in... .ui.i. i" .■■., J ,i i'"^n
HOVERING PERFORMANCE by the
GENERALIZED EQUATION (4.1)
Figure 17
^^Teo
I.AC
1.35
1.30
1.25
1.20
1.15
1. 10
1.05
1.0
W0'
,^mtm ^-M-»^^-^^^JVJil^.i-»^^a.<^«-^^-»..J.-^:....^ ,,.........-.■ , „■■.. ,. ^. ,,.:■,.. ■_..., a ... .. ^

■^—ü—wm »i " '■' ■' '-■ IUIII ll.ll|IMl|l...ll.l|..ll»^_ll|W ..11.. .„. imimmnnm
Figure 18
CCa4PARISCW OF THE IKEDICTED AND FLIGHT HOVERING PERFCRMANCE
FC» YUH-1D (44 ft rotor)
.^
50
46
42
O
ß4
38
34
30
26
22
36
Flight data
40 44
CT x 10
48 4
52 56 60
4
59
r-Millfiir mm^mi .^.^.t,,,,,.,.... .„... müigBitiiiMii'iiiiiif i -ii---- - .-J«t-^»'l.

IWpWIW»WII|II.Bill|lll|IJW|iJWI»ll(i"illJ.lili.'i.liililllil»ai»».ulllllM>iffPP<|i!,«liiJ|IM.u i w wi »'MJi.«w»ili,i." i "". Jl»lMl,llli,.pi,l|lilw,wiiPli!ipiB«!]Wi'WIM»lll^lPW^WW!W.W»»WI»«lWWW.>l»W'IJJ'™lll« '*m
Figure 19
DISTRIBUTION OF PERCENTAGE DEVIATION
OF IREDICTED ^/C« FROM FLIGHT DATA
70
60
50
40
30
20
10
Standard deviation = 2.0891 Sample mean = -0.3641
-6 -5 -4-3-2-10 1 2 3 4 5 6
PERCENTAGE DEVIATION
60
-'"- ■ ^...^..-.. ., ■iriiiiiiirli»nrt'J- -—^-■..-........—

'■ •Hmmrnnw*"' immmmmmmm m mmmmmm'-mmw"*,^.^^mmmmmmmm ii mi ■ ui.i.iwu im im ..1. ..im.j.i.immi.! ■iiiinminwiij
raOBABIUTY OF PERCENTAGE DEVIATION OF
PREDICTED CT/CTä FROM FLIGHT DATA
Figuro. 20
a o
1.0
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
Standard deviation s=2.0891 Sample mean m = -0.3642
0 +1.0 +2.0 +_3.0 +4.0 +5.0 +6.0
PERCENTAGE DEVIATION
61

■">.m***»**w'i~*uxn* Pi.i u i.i. i MTWWipW,-WfJ^li|.--)l..^',»Pyi^,W^-»llffTOl-..»---'''' '". HI' ■■—.»■v^-w-.'.^'ll».!"IWi.^l. ■»J ■yWIJ»J.'»|lL^^^^».i^l|i.l.,'WI!.I.W""V^.>.W'lll.Ji]|WM[lll|^JI|."W'W'WyWi!"
COMPARISON OF PREDlCTliD AND FLIGHT HOVERING PERFORMANCE
OF
OH-6A
Figure 21
60
56
52
48
o
Ot o
40
36
32
28
24
34
1.98%
38 42 46
CT x 10
62
50
4
54 58 61
mtmmmmmumt ^.^....i..-..,....,,. „...■.., Iifl

f . "-—wy iwpMinuinii n iiniimii|iii|i i , i ii i mpimi n mi iiiniiiiiii|iiiiiniipiii i i i ii ii iij
COMPARISON OF PREDICTED AND FLICHT HOVERING PERFORMANCE
OF
Figure 22
LOH 206A
30
28
26
PH
o
24
22
20
18
16 24
Flight
26 28 30
CT x 10
32
4
34 36 38
63
^i^^^,^..,, ,„„.,.„,„„

HUI iiiixniiiiliil n ip.a|iii it 11. II.I> i .u- -i ™- ....„.....„„...„„„.......MX... . i...... ..M.. .|l..,l.1|...l.lll, ,i, ...i... ,.,„ .i'-.i U-II,...,-I
42
40
38
36
o 34
to
32
30
28
26
COMPARISON OF PREDICTED AND FLIGHT HOVERING PERFORMANCE
OF
AH-1G
V & c
■<J
■c
t»
09
*J t> ^ ^
O «9 o ~y £
Figure. 'J i
r0
a
lLa
Predicted
4.33%
24 34 38 42 46
GT x 10
64
50
4
54 58 02
^^^ ■mniiii'rn i.l.»<,,.^.^.%i.«.,.».«wi.,.,ti

— ■' ■■ ■
CCMFARISON OF PREDICTED AND FLIGHT HOVERING PERFORMANCE
OF
Figure 24
YH-41
c & <p
30
28
26
24
in O
x 22 A.
20
18
16
26 28 30 32
CT x 10
34
4 36 38 40
65
mmm —- -■ -- ■■'■-•■

mm —i J ."l" ■"■ ■ T»..!, .IIM....;.»..!.! l.i..t.. |l. nil, ! l-^f^^X^pppn ...» -.1 ■ .. i. . ...... i mm-mt^^^^^m^
COMPARISON OF METHODS OF PREDICTION for
YUH-1D (48 ft rotor diameter)
Figure 2 5
o
34
32
30
28
26
24
22
20
18
to
t Flight data
Predicted by the Generalized Method
Predicted by the Two-Point Method
o
24 28 32 36 40 44 48
CT x 10
66
ii - ■ iilMXiiiiiMi i j rf ii M iti ii ■ in nfcir-•■ • .■■.-■..■.■■..■.,■,■.-.

iHIPW^VJW'^Wii ^wmv^m^*^msvm .M H ^wnni^m^ww^w^^w' ■ ■■l".1 ■■^w)»«- n ^^^^■wp»^T^l■Ml^^^^^^p»i^. ■>ii!'«wi^»ji"Mwwjw.'^^"^j|^wiwi'.-y^^"^^^w^ywip^iwi^^ ''»''Wüiwi^M
COMPARISON OF METHODS OF PREDICTION for
UH-1C
Figure 2'
O
44
42
40
38
36
34
32
30
28
26
Flight data
Predicted by the Generalized Method
Predicted by the Two-Point Method
34 38 42 46 50 54 58
CT x 10q
67
--— - - , ., , ■■....: ...^.j.^.^ .. -,.*..-,

|i|||f^iPiPPiPBP"WW'WIWB5!?PBpW(IP»"P^^ m
in
4J -P tM II (M
O 4J m in jS H
•H II -p
' T3 üOr-t W
,tt 0) It m CO ,0
■P - T3 J3 CM •^ Ö0 JÄ -.-I II
^3 ^
50. "i
^^
^3
4ä
3d
^
5Q
in O
ß4 U
34
3d
4d
4d
42^
36
132
26
22
M
50»
Ud
28
24
22
3a
3W
30
26
38^
^
W
34
2a
3ä
34
261
221
3d
22
26
24
22
34
Figure. A-l
PREDICTK» OF HOVERING PERFCRMAN CE BY APPLICATION (2)
for UH-1C
&
&
38 42 46 50 54 5&
CT x 10^
68
^t^.^.J..a^^.MJm^^mUt^-..^l..^^-.„.-..^ "'"laÜMM,.,,. .n < .1 I' I (III I , . :,:■=,,...,,.

■iiiiiuiniiniijiiiiijmui^<.in " in ßuuvmwmmmmmmm^mm !!!«nwiR^9nMW«i!m«imp*WP«pmi«i^^««wiipi|iiiiiii>*nii>>ip.iiiiiiii -vwwiMHwmiimii.M miufn
Figure A-i
it -P o 1-1 in +J >^ ä m
bo r-i
Öa) ii ■P . X! «M
4-1 •O JS O 4J ■r4 bOiH IW
cn, a) ii m
•O W)
4d
42^
m o
3^
3^
30!
ua
«♦a
5Q
4d
26
22
3d
32
28
24
22
43
3d
34
30^
26
5Q
4d
42
3d
■r4
50
46
42
38
3/4
22
3d
2d
221
34
30
be
22
PREDICTION OF HOVERING PERFORMANCE BY APPLICATION (5)
for UH-1C
<? &
& V £ J
'/
34 38 42 46 50 54 58
Cr X 10'
69
BUM "■- ' — -^ nitai »i.i w....i'"-'■"■- ■„,. j

||ii mwp imww!im*mi«.mmwi«m>*i[iiv.mimMKmm3mwuiMMm"™™*mw-' ;.I,IW»HW"I>I"-?I"-I»IH-«IP.»"I.I"I IITO. .»1. .W.III.U.H.III.JIW.!. WIM WWm<-W*Wim". ■»,.■!-WIIUlHipi-Lim
O LINEAR GRAPHICAL TEST FOR THE Mgurc B-l
SUITABILITY OF EMPIRICAL FUNCTIONS 0.16
^X YHU-1B
(CT /f = 0.0763)
0.12 0s
X. O Flight test data log Y x.
0.08 X^ / Y = aX
O XN^ /
0.04
Y = S/0!«, X * Z/D
o x.
0 -^ 0 •1*2 -1.0 -0.8 -0.6 -0.4 -0.2
log X
0.2
X/Y or XY
0.2
0.0
Aj □ Flight test data
0.4 0.5 0.6 0.7
X = Z/D
70
0.8 0.9 1.0
ÜÜfiinm- a m ....:, .^L ...,..; ■.. i„ .:.. . .^L^.^^. ^„ ^^^^■^■■^.■M.^^ ^^.^...w^^..^ ^.v.