Embed Size (px)
Citation preview

16 IEEE SYSTEMS JOURNAL, VOL. 6, NO. 1, MARCH 2012
Coordinated Tuning of DFIG-Based Wind Turbinesand Batteries Using Bacteria Foraging Technique
for Maintaining Constant Grid Power OutputY. Mishra, Member, IEEE, S. Mishra, Senior Member, IEEE, and Fangxing Li, Senior Member, IEEE
Abstract—This paper proposes the use of battery energystorage (BES) system for the grid-connected doubly fed inductiongenerator (DFIG). The BES would help in storing/releasingadditional power in case of higher/lower wind speed to maintainconstant grid power. The DC link capacitor is replaced withthe BES system in a DFIG-based wind turbine to achieve theabove-mentioned goal. The control scheme is modified and theco-ordinated tuning of the associated controllers to enhance thedamping of the oscillatory modes is presented using bacterialforaging technique. The results from eigenvalue analysis and thetime domain simulation studies are presented to elucidate theeffectiveness of the BES systems in maintaining the grid stabilityunder normal operation.
Index Terms—Bacterial foraging (BF), battery energy storage(BES) systems, control, doubly fed induction generator (DFIG),dynamic system stability, wind turbine (WT).
I. Introduction
W ITH THE increasing penetration of wind energy con-version systems (WECS) in the modern grid, it is
becoming imperative to investigate their impact on systemstability and reliability. Dealing with wind variability anduncertainty is one of the challenges of wind integration, whichhas opened doors to potential utilization of various energystorage systems.
Energy storage system such as battery energy storage (BES)can store electrical power during off-peak load period andcan supply power during peak-load. Moreover, if power flowthrough the battery is controlled properly, it can have a promis-ing effect on system dynamic stability. The studies involvingthe use of BES system to enhance power system stability hasbeen reported in the past [1]. However, the effectiveness ofBES system in wind generation scheme is still premature.The fluctuating wind pattern has compelled researchers acrossthe globe to integrate BES system with the wind generatingfarms.
The value of bulk energy storage for managing wind powerfluctuations has been realized and its impact on spinning
Manuscript received August 5, 2010; revised January 17, 2011; acceptedFebruary 27, 2011. Date of publication September 1, 2011; date of currentversion February 23, 2012.
Y. Mishra is with Midwest ISO, Carmel, IN 46032 USA (e-mail:[email protected]).
S. Mishra is with the Indian Institute of Technology Delhi, New Delhi110016, India (e-mail: [email protected]).
F. Li is with the University of Tennessee, Knoxville, TN 37916 USA(e-mail: [email protected]).
Digital Object Identifier 10.1109/JSYST.2011.2162795
reserve requirement is reported in [2] and [3]. Furthermore,an evolutionary iterative particle swarm optimization (PSO)approach for the optimal wind-battery coordination in a powersystem is proposed [4], [5]. The concept of up/down-spinningreserves is introduced into the wind-battery coordination prob-lem for improving system security and optimal utilization ofwind energy. The optimal operation schedule for the BESsystem and other generating units is proposed. However, thesestudies do not include the impact of the dynamics of BES onthe system stability.
The impact of “wind farm-battery” unit as a power backupof large wind farms on the grid stability and control is investi-gated [6]. The necessity of batteries to maintain synchronismin the event of major outage of several 100 MWs of offshorewind farms can be easily appreciated. Batteries can supplythe additional power for few seconds owing to their very fastaccess time and, hence, can avoid the prospective cascadingfailure in the grid [7]. However, maintaining big sources ofbatteries only for the back-up is not a cost-effective option.Moreover, this would require additional power electronic de-vices to control the charging/discharging phenomena of batteryunder fluctuating wind speed. Instead, if used within doublyfed induction generator-wind turbine (DFIG-WT) system, thebattery would help not only smoothen the power output butalso eliminate the use of extra power electronic devices.
Initial studies of using rechargeable batteries in DFIG-based WT system is reported in [8]. The author proposestwo schemes for appropriately utilizing the batteries for sta-bility purposes. The first scheme uses batteries as an energysource/sink for the control of generator rotor currents. Thesecond scheme uses additional group of batteries for thesmooth WT power output and emergency support to the grid.The economic cost and benefit analysis is presented. However,the study is limited to steady-state models.
Hence, there is a need for a comprehensive stability studiesinvolving the dynamic model of battery and DFIG-based WTsystem. This paper investigates the impact of batteries onDFIG system. The controllers of BES-based DFIG systemshould act in such a manner so as to extract maximum powerfrom the available wind energy and maintain the constant gridpower injection.
This paper is structured as follows. Sections II and IIIpresent the modeling of BES and the DFIG-based BES system,respectively. The detailed control methodology is discussed in
1932-8184/$26.00 c© 2011 IEEE

MISHRA et al.: COORDINATED TUNING OF DFIG-BASED WIND TURBINES AND BATTERIES 17
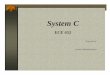
Fig. 1. Equivalent circuit model of BES.
Section IV. Section V describes the bacterial foraging (BF)algorithm for the optimization of the controllers parameters.Section VI discusses simulation and results followed by con-clusions in Section VII.
II. BES Model
Over the years, there has been extensive research in mod-eling the behavior of batteries. Dynamic models developedby chemistry experts in [9] and [10] are not expressed interms of electrical networks and, therefore, difficult to analyzefor electrical power applications. A simple battery modelis presented in [11], but is limited for some circuit simu-lations where energy drawn is assumed to be infinite andcharging/discharging is of little importance. The equivalentcircuit of batteries is represented by a constant voltage sourcebehind a parallel resistor–capacitor circuit, i.e., the Theveninequivalent in [12] and [13]. Although accurate, this modeldoes not take in account the temperature dependance. Theauthors in [14] and [15] have proposed a detailed dynamicmodel that incorporates the real interaction with the externalworld including the environmental temperature, battery voltageand current, extracted charge, and electrolytic temperature.
Although higher order models have been proposed, there isa need for an appropriate BES model which is suitable forthe power systems stability studies. A charging/dischargingdynamic model presented in [16] is used in this paper for thestability analysis. The circuit model of BES is shown in Fig. 1.
The dynamic equations of BES system can be representedas
Cbp
dVboc
dt= ibes − Vboc
Rbp
(1)
Cb1dVb1
dt= ibes − Vb1
Rb1(2)
where ibes is the current input to the BES system and can beexpressed as
ibes =Vbt − Vboc − Vb1
Rbt + Rbs
. (3)
Cbp represents the charging capacity of the BES system.Although the capacitor Cbp is a function of voltage, its valuecan be considered constant during the dynamic period. This isvalid for the power system stability studies since the terminalvoltage of the equivalent battery cannot change instantly [16].
Fig. 2. DFIG-BES system.
The resistance, Rbp simulates the self-discharging of a battery.Rbt is the equivalent resistance of parallel/series-connectedbatteries and its value depends on the type of connection andthe capacity of batteries. The parallel circuit of Cb1 and Rb1
is used to describe the energy and voltage during charging ordischarging.
III. Modeling of DFIG with BES System
The DFIG has been popular among various other techniquesof wind power generation, because of its higher energy transfercapability, low investment, and flexible control [17]. DFIGis different from the conventional induction generator in away that it employs a series voltage-source converter to feedthe wound rotor. The feedback converters consists of rotorside converter (RSC) and grid side converter (GSC). Thecontrol capability of these converters give DFIG an additionaladvantage of flexible control and stability over other inductiongenerators [18], [19]. The dq control technique (control interms of flux torque) is the conventional way of controllinginduction generators. The flux magnitude angle control(FMAC) for DFIG make it work like a synchronous generatorand has been reported in [20] and [21]. This is furtherdiscussed in Section IV.
The grid-connected single machine infinite bus (SMIB)system is shown in Fig. 2. The stator and rotor voltages ofDFIG are supplied by the grid and the power converters,respectively. The DC link capacitor is replaced by the BESsystems in Fig. 2.
The components of DFIG model are well established in theliterature [22], however, for the sake of completeness of thispaper, they are introduced in brief as below.
A. Turbine and Drive Train
The mechanical power input to the WT is considered asconstant, i.e., the blade pitch angle do not change duringthe period of study. In this paper, the two mass drive trainmodel [23] is considered and the dynamics can be expressedby the differential equations [22] as follows:
2Ht
dωt
dt= Tm − Tsh (4)
1
ωelb
dθtw
dt= ωt − ωr (5)
2Hg
dωr
dt= Tsh − Te (6)

18 IEEE SYSTEMS JOURNAL, VOL. 6, NO. 1, MARCH 2012
where Te = Ps
ωsis the electrical torque, Tsh = Kshθtw is the shaft
torque, Ht is the inertia constant of turbine, Hg is the inertiaconstant of the generator, θtw is the shaft twist angle, ωt is theWT angular speed, ωr is the generator angular speed, ωs isthe synchronous speed, ωelb is the electrical base speed, andKsh is the shaft stiffness.
B. Generator
The most common way of representing DFIG for thepurpose of simulation and control is in terms of arbitrarydirect and quadrature axes (dq axes) quantities, which forma reference frame that rotates synchronously with the statorflux vector [22]. The various variables are defined as
e′qs=Kmrrωsψdr, e
′ds=−Kmrrωsψqr, L
′s=Lss − L2
m
Lrr
, Tr = Lrr
/Rr
Kmrr = Lm
/Lrr, ωe = ωelbωs, R2 = K2
mrrRr and R1 = Rs + R2
where Lss is the stator self induction, Lrr is the rotor selfinduction, Lm is the mutual inductance between rotor andstator, Rr is the rotor resistance, and Rs is the stator resistance.
For balanced and unsaturated conditions, the correspondingper unit (p.u.) DFIG model can be expressed as [22]
ωsL′s
ωe
diqs
dt= −R1iqs + ωsL
′sids +
ωr
ωs
e′qs − 1
Trωs
e′ds...
... − vqs + Kmrrvqr (7)
ωsL′s
ωe
dids
dt= −R1ids − ωsL
′siqs +
ωr
ωs
e′ds +
1
Trωs
e′qs...
... − vds + Kmrrvdr (8)
1
ωe
de′qs
dt= R2ids − 1
Trωs
e′qs +
(1 − ωr
ωs
)e
′ds − Kmrrvdr (9)
1
ωe
de′ds
dt= −R2iqs − 1
Trωs
e′ds −
(1 − ωr
ωs
)e
′qs + Kmrrvqr
(10)
where e′ds and e
′qs are d and q axis voltages behind-transient
reactance (X = ωsL′s), respectively, ψdr and ψqr are d and q
axis rotor fluxes, respectively, and ids and iqs are d and q axisstator currents, respectively.
C. Converter Model
The converter model in DFIG system comprises of twopulse width-modulated convertors connected back to back viaa DC link. The RSC and the GSC act as controlled voltagesources. The RSC injects an AC voltage at slip frequency tothe rotor. The role of GSC, apart from injecting an AC voltageat power frequency to the grid, would differ if BES is appliedinstead of DC capacitor. When the DC capacitor is used, GSCmaintains the voltage of the DC-link capacitor constant. Thetotal power injected by the DFIG is maintained constant if BESsystem is used to replace the capacitor. The power balanceequation for the converter model can be written as
Fig. 3. Phasor diagram illustrating the operation of DFIG system [24].
Pr = Pg + PX (11)
where Pr and Pg are the active power at RSC and GSC,respectively, which can be expressed as
Pr = vdridr + vqriqr (12)
Pg = vdgidg + vqgiqg (13)
where vds and vqs are d and q axis stator voltages, idr and iqr
are d and q axis rotor currents, idg and iqg are d and q axiscurrents of the GSC, vdg and vqg are d and q axis voltages ofthe GSC, vdr and vqr are d and q axis rotor voltages, and vdc
and idc are the voltage and current of the DC link capacitor.The power PX would be Pdc or Pbes depending on weatherDC link capacitor or BES system is used in the DFIG systemand can be expressed by
Pdc = vdcidc = Cvdc
dvdc
dt(14)
Pbes = Vbt × ibes (15)
where vdc and idc are voltages across and current of DC linkcapacitor. C is the capacitance of the DC link capacitor. Thedetails of converter controllers are elaborated in the followingsection.
IV. Controllers for DFIG
This section describes the controllers used for the DFIGsystem. As mentioned above, there are two back to backconverters, hence we need to control these two convertersides. Primarily, these controller are known as RSC and GSCcontrollers.
A. RSC Controllers
The phasor diagram in Fig. 3 describes the control scheme(based on FMAC) for the RSC controller.
The magnitude of the eig, internally generated voltage vectorin the stator, depends on the magnitude of the rotor fluxvector, ψr. This is analogous to the excitation control in syn-chronous generator and hence help in enhancing the dampingof the electromechanical modes. This flux can be controlledby Vr, the rotor voltage. The angle δig, between the voltagevector eig and q axis of the reference frame, is determined by

MISHRA et al.: COORDINATED TUNING OF DFIG-BASED WIND TURBINES AND BATTERIES 19
Fig. 4. Control scheme for the DFIG system.
the power output of the DFIG. Since vector eig is orthogonalto ψr, the angle between d axis and ψr is also given by δig.The adjustment of the magnitude of the rotor voltage vector,|Vr|, and its phase angle, δr, is employed for the control ofterminal voltage and electrical power, respectively [24].
The configuration of the feedback controllers for the DFIGsystem is shown in Fig. 4. The RSC controller consists of twoparts. One part aims at controlling the active power so as totrack the Psref while the second part is to maintain the terminalvoltage.
The Psref is determined by the WT power speed characteris-tic (Cp −λ curve) for maximum power extraction [23]. Undernormal operating condition, the active power set-point, Psref ,
for the RSC is defined by the maximum power tracking point,which is a function of optimal generation speed. The auxiliarysignal u13 is added to the angle control of the RSC controllerto track the reference rotor speed, ωrref . This speed is decidedbased on constant “λ” principle, obtained from the C(p, λ)curve for the extraction of maximum power. Fig. 4 presentsthe schematic of the overall control methodology, where Kpi
and KIi are the proportional and integral gain constant for ithproportional-integral controller. The internally generated volt-
age vector, eig, is∣∣eig
∣∣ =√
e′2ds + e
′2qs and the angle is defined as
δeig= tan−1
(e
′ds/e
′qs
).

20 IEEE SYSTEMS JOURNAL, VOL. 6, NO. 1, MARCH 2012
B. GSC Controllers
In the conventional DFIG scheme, where the DC linkcapacitor is used, GSC controller would maintain the voltageof the DC link capacitor, Vdc, at the desired level. However,in this paper, the main function of GSC, with BES in theDFIG system, is to maintain constant grid power. This wouldessentially mean that Pgrid = Ps + Pg should be constantirrespective of the wind speed. In the case of increased speed,the energy is stored in the battery, whereas battery suppliesthe energy when the speed is lower. The reference signal forthe supplied grid power, Pgridref , is set to a constant valueindependent of the wind speed. With the DC capacitor in theDFIG system, the signals Pgridref and Pgrid can be replaced byVdcref and Vdc, respectively. The reason for choosing Pgridref
reference signal in the case of rechargeable batteries would bediscussed in Section VI. All other controllers need not changeif DC link capacitor is replaced by BES in the DFIG system.
The reactive power set point, qcref , is set to zero, to reducethe GSC power rating. This implies that GSC only exchangesactive power with the grid and hence the reactive powertransmission to the grid by DFIG is only through the stator.The inphase and quadrature component of the GSC voltage ismodified by
vginphase = vginphaseref + u11xtg − (Vsref − Vs) (16)
vgquad = vgquadref − u9xtg (17)
where vginphaseref = Vs +icgquadref ∗xtg and vgquad = icginphaseref ∗xtg, and xtg is the three-winding transformer reactance betweenGSC and the stator terminal. icginphaseref and icgquadref are theinphase and quadrature component of GSC current to the statorterminal voltage defined as icginphaseref = Pr/Vs and icgquadref =(vds ∗ iqg − vqs ∗ idg)/Vs.
V. BF for the Optimal Control of DFIG System
As mentioned in the previous section, DFIG has fivecontrollers and the tuning of these controllers by hit andtrial method is cumbersome. The co-ordinated tuning ofthese controllers is necessary to enhance the system stabil-ity. Conventional optimization technique like linear/nonlinearprogramming are gradient-based algorithms requiring the ob-jective function to be differentiable and often lead to sub-optimal solution. Whereas the population-based optimizationtechniques, such as genetic algorithm (GA), BF, and PSO, donot require the differentiable objective function and are knownfor their capability of locating optimal solution and betterconvergence speed [25]–[27]. GA is reported to have trouble inthe optimization when dealing with epistatic objective function(i.e., where the parameters to be optimized are highly corre-lated). Moreover, the premature convergence of GA degradesits performance and reduces its search capability [28], [29].Among various methods for the optimization, BF is selectedbecause of its better capability of locating optimal solutionand higher convergence speed. However, it shall be too early(or simplistic) to conclude that BF is the best optimizationalgorithm among rest others existing. In this regard, it ispertinent here to throw some light from the findings of [30],
where it is established that any of such optimization algorithmsperforms identically with others when its performance isaveraged across several possible optimization problems.
The idea of BF is based on the fact that natural selectiontends to eliminate animals with poor foraging strategies andfavor the propagation of genes of those animals that havesuccessful foraging strategies since they are more likely toenjoy reproductive success. The control of these bacteria isbasically governed by four processes, namely, chemotaxis,swarming, reproduction, elimination, and dispersal [25].
A. Chemotaxis
This process is achieved through swimming and tumbling.Depending upon the rotation of the flagella in each bacteriumit decides whether it should move in a predefined direction(swimming) or an altogether different direction (tumbling), inthe entire lifetime of the bacterium. To represent a tumble, aunit length random direction, say φ(j), is generated; this willbe used to define the direction of movement after a tumble.In particular
θi(j + 1, k, l) = θi(j, k, l) + Cl(i)φ(j) (18)
where θi(j, k, l) represents the ith bacterium at jth chemotac-tic, kth reproductive, and lth elimination and dispersal step.Cl(i) is the size of the step taken in the random directionspecified by the tumble (run length unit).
B. Swarming
Swarming makes the bacteria congregate into groups andhence move as concentric patterns of groups with high bac-terial density. Mathematically, swarming can be representedby
Jcc(θ, P(j, k, l)) =S∑
i=1Ji
cc
(θ, θi(j, k, l)
)
=S∑
i=1
[−dattract exp
(−ωattract
p∑m=1
(θm−θim)2
)]
+S∑
i=1
[hrepelent exp
(−ωrepelent
p∑m=1
(θm−θim)2
)] (19)
where Jcc(θ, P(j, k, l)) is the cost function value to be addedto the actual cost function to be minimized to present a timevarying cost function. “S” is the total number of bacteria and“p” is the number of parameters to be optimized which arepresent in each bacterium. dattract , ωattract , hrepelent , and ωrepelent
are different coefficients that are to be chosen judiciously.dattract is the depth of the attractant released by the celland sets the magnitude of secretion of attractant by a cell.ωattract is the width of the attractant signal and determinesthe chemical cohesion signal diffusion (smaller value makesit diffuse more). Whereas, hrepelent is the height of the repel-lant effect and ωrepelent is the measure of the width of therepellant which controls the tendency to repel other cells. Themagnitude of dattract and hrepelent should be same [31]. It isso that there is no penalty added to the cost function whenthe bacterial population converges, i.e., Jcc of (19) will be 0.Their numerical value should be decided based on the required

MISHRA et al.: COORDINATED TUNING OF DFIG-BASED WIND TURBINES AND BATTERIES 21
Fig. 5. Flowchart summarizing the BF algorithm for the optimization ofcontroller parameters.
variation in the magnitude of the actual cost function J toobtain a satisfactory result. The value of ωattract and ωrepelent
should be such that if the euclidian distance between bacteriais large, the penalty Jcc is large.
C. Reproduction
The least healthy bacteria die and the other healthiestbacteria each split into two bacteria, which are placed in thesame location. This makes the population of bacteria constant.Instead of taking the average value of all the chemotacticcost functions, the minimum value is selected for decidingthe health of the bacteria [32]. Mathematically, for particularkth and lth, the health of the ith bacteria would be given by
Jihealth = min
jε{1,2···Nc}{Jsw(i, j, k, l)}
where Jsw = J + Jcc.
D. Elimination and Dispersal
From a broad perspective, elimination and dispersal areparts of the population-level long-distance motile behavior. Ithelps in reducing the behavior of stagnation (i.e., being trappedin a premature solution point or local optima) often seen insuch parallel search algorithms. This section is based on thework in [32]. The detailed mathematical derivations as wellas theoretical aspect of this new concept are presented in [25]and [32].
In this paper, optimization using BF scheme is carried outto find the optimal controller parameters of the DFIG system.The algorithm is presented in the flowchart as shown in Fig. 5.
VI. Simulation and Results
The above-mentioned optimization technique is applied to aSMIB DFIG system. The DFIG system with controllers can be
TABLE I
Selected Eigenvalues of the WT System Without Any
Controllers at Vw = 8.5 m/s
Model Eigenvalue Freq. Damp. ParticipationNo. λ (Hz) (%) Factor (%)1 −37.95 ± j504.82 80.34 7.49 iqs(49.2), ids(48.2),
e′ds(1.2)
2 −7.62 ± j55.87 8.89 13.51 e′ds(48.1), ωr(43.9),
ids(2.3)3 −1.12 ± j3.78 0.60 28.38 θtw(46.3), ωt(35.7),
e′qs(12.5)
represented by the set of differential and algebraic equations(DAEs) as
.x = f (x, y, u)
0 = g(x, y, u) (20)
where x, y, and u are the vectors of DFIG state, algebraic,and control variables, respectively. The state vector is definedby
x = [iqs, ids, e′qs, e
′ds, ωr, θwt, ...
...ωt, Vboc, Vb1, u1, u3, u5, u6, u8, u10, u12]T . (21)
The states Vboc and Vb1 are replaced by vdc when the DC linkcapacitor is used in place of BES system.
Linearizing the above DAE about an operating point(x0, y0, u0) (which is obtained by the load flow at a particularwind speed), the system matrix Asys can be calculated asfollows:
.x = Asysx. (22)
The parameters of the DFIG system is given in the Ap-pendixes.
A. Objective Function
The parameters of DFIG controllers are selected so as tominimize the objective function
J = 1/(min∀i
ζi) (23)
where ζi is the damping ratio of the ith eigenvalue of thesystem. This objective function makes sure that the minimumdamped eigenvalue is heavily damped and the system smallsignal stability is ensured.
B. Eigenvalue Analysis of BES-Based DFIG SystemsEigenvalues of the WT system without any control scheme
is shown in Table I. The first mode is stator or electricalmode and the second is electromechanical mode, which can beidentified by looking at the participation factors. As electricalstate (e
′ds) and mechanical state (ωr) participates in the second
mode, this mode is electromechanical mode. The stator modehas the lowest damping ratio but its frequency is high andhence out of the range of interest. The low frequency mode,

22 IEEE SYSTEMS JOURNAL, VOL. 6, NO. 1, MARCH 2012
TABLE II
Selected Eigenvalues of the DFIG-WT System at Vw = 8.5 m/s
With DC Link Capacitor With BES SystemModel Eigenvalue Freq. Damp. Participation Model Eigenvalue Freq. Damp. ParticipationNo. (λ) (Hz) (%) Factor (%) No. (λ) (Hz) (%) Factor (%)1 −37.6 ± j496 78.9 7.55 iqs(49.3), ids(45.8), 1 −38.0 ± j485 77.3 7.81 iqs(49.3), ids(45.5),
e′qs(2.2) e
′qs(2.6)
2 −13.5 ± j61.2 9.74 21.6 e′ds(48.5), ωr(37), 2 −11.9 ± j66.6 10.59 17.6 e
′ds(48.1), ωr(30.5),
e′qs(6.5) e
′qs(13.8)
3 −0.81 ± j5.98 0.95 13.4 θtw(38), e′qs(19), 3 −1.84 ± j6.88 1.09 25.8 θtw(40), e
′qs(21.5),
ωt(12.4), ωr(5.6) ωr(11)4 −0.56 ± j5.04 0.80 11.2 Vdc(43.2), u8(43.04), 4 −0.51 ± j0.52 0.08 70.5 u8(43.9), ωt(23),
θtw(6.7) u3(14.9)5 −0.20 ± j0.05 0.008 96.7 ωt(25.5), u3(24.7), 5 −0.07 ± j0.09 0.01 65.4 u3(31), u1(29),
u1(17.3) ωt(26.3)
TABLE III
Selected Eigenvalues of the BES-Based DFIG System with Controllers at Different Wind Speeds
Wind Speed 7 m/s 7.5 m/s 8 m/s 9 m/sModel Eigenvalue Freq. Damp. Eigenvalue Freq. Damp. Eigenvalue Freq. Damp. Eigenvalue Freq. Damp.No. (Hz) (%) (Hz) (%) (Hz) (%) (Hz) (%)1 −44 ± j552 88.0 7.94 −42 ± j534 85.0 7.90 −40 ± j512 81.5 7.86 −36 ± j 456 72.6 8.042 −0.59 ± j92.5 14.7 0.64 −2.06 ± j71.6 11.4 2.8 −4.42 ± j55.6 8.8 7.9 −17.5 ± j91.9 14.6 18.73 −2.72 ± j8.88 1.41 29.32 −2.76 ± j6.13 0.98 41.06 −0.65 ± j3.52 0.56 18.20 −0.21 ± j9.47 1.51 2.24 −0.10 ± j0.54 0.09 17.42 −0.25 ± j0.49 0.08 45.49 − − − −0.14 ± j0.57 0.09 23.75 −0.09 − 100 −0.13 ± j0.07 0.01 87.3 −0.01 ± j0.04 0.01 21.00 −0.13 − 100
Fig. 6. Dynamic response of the DFIG-BES system (all the values are in p.u.).

MISHRA et al.: COORDINATED TUNING OF DFIG-BASED WIND TURBINES AND BATTERIES 23
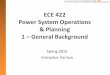
Fig. 7. Steady state calculation illustrating the use of BES system instead of DC link capacitor in DFIG-based WT system (all the values are in p.u.).
i.e., mechanical mode (0.60 Hz) is critical as its time constantis high and hence would take time to settle down.
However, the application of controllers (necessary to en-hance the performance of the DFIG system [33]) deterioratesits damping from 28.38% (Table I) to 13.4% (Table II). Thesystem is optimized using BF algorithm. The DFIG systemis equipped with all the controllers, namely, RSC, GSC, andauxiliary controllers (as presented in Fig. 4). However, theimplementation of one of the GSC control, namely, Pgrid/vdc,is different for DC capacitor and BES system as discussed inSection IV-B. The eigenvalues of the optimized DFIG systemwith DC link capacitor is presented in Table II. In the caseof DFIG system with DC link capacitor, there are total 15differential equations (including seven equations for the WTsystem, one for DC capacitor, and seven equations for thedifferent controllers) and therefore, there are 15 eigenvalues.However, only the important oscillatory modes are listed inthis paper. The damping of the fourth mode (0.80 Hz) is 11.2%.It is observed that the states associated with 0.80 Hz mode areprimarily Vdc and u8.
When DC capacitor is replaced with BES, the DFIG systemis again optimized using BF technique. With the inclusion ofBES, there are total 16 differential equations. One differentialequation for DC link capacitor is replaced with two equationsfor BES as discussed in Section II. The critical eigenvalues arepresented in Table II. It is observed that there are no oscillatorymodes related to the states of BES (Vboc and Vb1). Hence, thedynamics of the battery terminal voltage is not much affectedas it would have been if the DC link capacitor were to beused. This is the reason for selecting the grid power, Pgrid , asa control signal for one of the controller in GSC when BES isused. The variation of the eigenvalues with the changed windspeed is presented in Table III.
The main purpose of this paper is to ensure that the gridpower supplied by the DFIG system remains constant irrespec-tive of the wind speed. This can be achieved by replacing DClink capacitor with BES system. Although the replacement ofDC link capacitor with BES does not have any deleterious ef-fect on the eigenvalues of the system, yet it cannot substantiatethe importance of BES in DFIG until the nonlinear dynamics
is thoroughly investigated. Therefore, it is important to observethe dynamics of the BES-based DFIG system.
C. Dynamic Simulations
The nonlinear simulation of the DFIG system is observedto validate the efficacy of the BES in maintaining the gridpower constant. The optimized controller parameters are usedand the system is simulated in MATLAB using ODE15s.
Initially, the system is operated at Vw = 8.5 m/s, with thecorresponding turbine power (Pt) of 1.38 p.u. The responseof BES system under varying wind speeds is investigated bychanging the corresponding turbine power (Pt) from 1.38 p.u.(Vw = 8.5 m/s) to 1.93 p.u. (Vw = 9.5 m/s). A step increase inPt at t = 1 s simulates the sudden increase in the wind speed.Furthermore, at t = 20 s, the Pt is reduced to the originalvalue to simulate the sudden decrease in the wind speed. Theresulting dynamic response of the DFIG-BES system is shownin Fig. 6. The first part of all the figures, i.e., from t = 1 s tot = 20 s, shows the charging of the batteries with the increasein the WT power. Whereas, the second part (t = 20 s tot = 40 s) represents the discharging phenomena of the batteriesto maintain the grid power at the constant level. It is observedthat the additional power generated by the increase in the windspeed is stored in the batteries via rotor through RSC and statorthrough the GSC. This can be further explained by schematicdiagram in Fig. 7. With the increase in the turbine power,the battery power, Pbes, also increases from 0 to 0.534 p.u.This energy is supplied to the grid when there is a decreasein the input turbine torque. The dynamics of the batterycharging/discharging current, ibes, is also shown in Fig. 6.Because of the change in wind velocity, power input to theturbine changes. However, the grid power remains constant.The differential power is absorbed/released by the BES inDFIG. It is also observed that the overshoot in the powerinjected to the grid Pgrid is drastically reduced. With BESand appropriate GSC controller parameters, there is only 20%over/undershoot (in Pgrid). This is primarily because of thecontroller parameters of Pgrid controller of GSC. There wouldbe more than 60% over/undershoot (in Ps) and would be re-flected in Pgrid had the controllers been not optimized properly.

24 IEEE SYSTEMS JOURNAL, VOL. 6, NO. 1, MARCH 2012
Fig. 8. Dynamic response of the DFIG-BES system after fault (all the values are in p.u.).
The steady state calculations under different turbine powers,Pt1 and Pt2, are shown in Fig. 7. The subscript “1” and “2”represent the steady state condition at Pt1 and Pt2, respectively.For example, Ps1, Pr1, Pg1, and Pbes1 are the stator, rotor, GSC,and BES power when the input turbine power is Pt1, respec-tively. Increased wind speed results in 0.548 p.u. increase inthe turbine power, out of which, 0.534 p.u. power is absorbedby the batteries and the rest is accounted for the rotor andstator losses. The steady state grid power remains the same. Itis important to emphasize that the maximum power tracking,from Cp(λ, β) curve, is achieved at the changed Pt . For aconstant “λ,” the ratio, ωr/Vw, is constant; as a result
lωr1
Vw1=
ωr2
Vw2⇒ ωr1
ωr2=
Vw1
Vw2
⇒ (1 − s1)ωs
(1 − s2)ωs
=Vw1
Vw2
⇒ (1 − pr1/ps1)
(1 − pr2/ps2)=
Vw1
Vw2(24)
where s denotes the slip, and pr and ps are rotor and statorpower before losses. However, as the losses are very small,the values of pr and ps can be approximately equal to Pr andPs. The DFIG-BES system is operating at super-synchronousmode and hence, slip (s) is negative. It can be observed fromFig. 7 that (24) is satisfied and therefore, the maximum powertracking is maintained. This is important as the applicationof BES in DFIG should also ensure that the maximum
Fig. 9. Performance of BF algorithm for Vw = 8.5 m/s.
power is extracted from the wind and hence, stored in thebatteries.
Therefore, the battery stores the additional energy resultingfrom the increase in the wind speed, which can be releasedto the grid whenever required. Thus, the BES system helps inmaintaining the grid power, Pgrid , constant.
Moreover, the DFIG-BES system is tested under faultconditions. A three-phase fault is created at 1 s for 18 ms nearthe infinite bus and response is observed as shown in Fig. 8.The system is stable and is able to ride through the fault.

MISHRA et al.: COORDINATED TUNING OF DFIG-BASED WIND TURBINES AND BATTERIES 25
VII. Conclusion
Increasing penetration of intermittent generation resourcessuch as wind requires effective utilization of energy storagedevices. The use of BES was one of the possible option toensure the stable and reliable grid operation. BES systemwould help store/release the additional energy to maintainthe constant grid power injection. During higher wind speeds,the excess energy was stored in BES while keeping the gridpower at a constant level. Whereas, the stored energy in thebatteries was supplied to the grid during lower wind speeds.This ensured the stable/constant power supply from WECSunder varying wind conditions. The application of BES inDFIG-based WT would not only reduce the uncertainty ofpower supplied by WECS but also help smoothen the spikes ofthe highly varying market power price. Moreover, the energystored in the battery can act as a reserve and would helpduring minor contingencies in the grid. Also, power throughthe battery if effectively controlled can enhance the systemdamping.
The coordinated tuning of the associated controllers toimprove the damping of the electromechanical mode in theDFIG was also presented in this paper. Replacing the DC linkcapacitor with BES system eliminated the oscillatory modecorresponding to the vdc.
The implementation of BES in DFIG-based WT does not re-quire any additional circuits/equipments. The only adjustmentrequired for the effective operation was to change the con-troller reference signal from vdc to Pgrid in the grid side controlscheme (this should be followed by co-ordinated tuning of allthe controller parameters for optimized performance).
As this study was based on SMIB DFIG system, conclusionsof this paper should not be extended to multimachine DFIG-based WT system. Nevertheless, this paper does provide agood initial study of the DFIG-BES system with controllers.This paper included the performance of BES-based DFIGsystem under faults. However, the improvement in fault ridethrough capability of wind farms with BES systems andassociated details are yet to be studied in detail. Moreover,the affect of implementing BES in DFIG on the power controlfunction of GSC and its effect on the convertor rating wouldbe addressed in the following studies.
Appendix A
DFIG SPECIFICATIONS AND PARAMETERS OF THE SMIB DFIG
SYSTEM (IN P.U.) AND DFIG SPECS
Rated power = 2 MW; rotor speed = 1850 rpm; voltage =0.6 kV; wind speed = 8.5 m/s;
Ht = 4; Hg = 0.4; Xm = 4; Lm = 4; xtg = 0.55; C = 0.01; xe = 0.06;
Lss = 4.04; Lrr = 4.0602; Rs = (Xm/800); Rr = 1.1 ∗ Rs.
Appendix B
PARAMETERS USED FOR THE OPTIMIZATION (BF ALGORITHM)
S = 4; Cl = 0.07; dattract = 1.9; ωattract = 0.1;
hrepelant = dattract; ωrepelant = 10.
Appendix C
BES PARAMETERS [16]
Cbp = 52 600 μF; Cb1 = 1 μF; Rbt = 0.0167�;
Rbp = 10 K�; Rb1 = 0.001�; Rbs = 0.013�.
The above values of BF algorithm parameters are usedfor optimizing the controller parameters. First, all the sixcontroller parameters (i.e., six pairs of KPm and KIm) areoptimized and then the damping controller (KP7 and KI7) isoptimized for a given wind speed. Fig. 9 shows the perfor-mance of the algorithm for a particular wind speed.
References
[1] Z. Yang, C. Shen, L. Zhang, M. L. Crow, and S. Atcitty, “Integration ofa statcom and battery energy storage,” IEEE Trans. Power Syst., vol. 16,no. 2, pp. 254–260, May 2001.
[2] M. Black and G. Strbac, “Value of bulk energy storage for managingwind power fluctuations,” IEEE Trans. Energy Conversion, vol. 22, no. 1,pp. 197–205, Mar. 2007.
[3] R. Doherty and M. O’Malley, “Quantifying reserve demands due to in-creasing wind power penetration,” in Proc. IEEE Power Tech., Bologna,Jun. 2003, pp. 1–5.
[4] T. Y. Lee, “Optimal wind battery coordination in a power system usingevolutionary iterative particle swarm optimization,” IEE Proc.-Gener.Trans. Distrib., vol. 2, no. 2, pp. 291–300, Mar. 2008.
[5] T. Y. Lee, “Operating schedule of battery energy storage systemin a time-of-use rate industrial user with wind turbine genera-tors: A multi-pass iteration particle swarm optimization approach,”IEEE Trans. Energy Conversion, vol. 22, no. 3, pp. 774–782, Sep.2007.
[6] E. Spahic, G. Balzer, and A. D. Shakib, “The impact of the ‘wind farmbattery’ unit on the power system stability and control,” in Proc. IEEEPower Tech., Lausanne, Jul. 2007, pp. 485–490.
[7] E. Spahic and G. Balzer, “The application of batteries as a backup oflarge wind farms,” in Proc. Large Scale Integr. Wind Power TransmissionNetw. Offshore Wind Farms, no. 43. Oct. 2006.
[8] T. C. Yang, “Initial study of using rechargeable batteries in wind powergeneration with variable speed induction generators,” IET Renew. PowerGener., vol. 2, no. 2, pp. 89–101, Jun. 2008.
[9] H. Bode, Lead Acid Batteries. New York: Wiley, 1977.[10] M. Shepard, “Design of primary and secondary cells, an equation
describing battery discharge,” J. Electrochem. Soc., vol. 112, no. 7, pp.657–664, Jul. 1965.
[11] Z. M. Salamah, M. A. Casacca, and W. A. Lynch, “A mathematicalmodel for lead-acid batteries,” IEEE Trans. Energy Conversion, vol. 7,no. 1, pp. 93–97, Mar. 1992.
[12] D. Sutano and H. L. Chang, “A new battery model for the usewith battery energy storage systems and electric vehicles powersystems,” in Proc. IEEE PES Winter Meeting, vol. 1. Jan. 2000,pp. 470–475.
[13] G. E. Gareis, D. P. Carrol, C. M. Ong, and P. Wood, “The interaction ofbattery and fuel cells with eletrical distribution system: Force commu-tated converter interface,” IEEE Trans. Power App. Syst., vol. 96, no. 4,pp. 1242–1250, Jul. 1977.
[14] M. Ceraolo, “New dynamic models of lead-acid batteries,” IEEE Trans.Power Syst., vol. 15, no. 4, pp. 1184–1190, Nov. 2000.
[15] S. Barsali and M. Ceraolo, “Dynamic models of lead-acid batteries:Implemantation issues,” IEEE Trans. Energy Conversion, vol. 17, no. 1,pp. 16–23, Mar. 2000.
[16] C. F. Lu, C. C. Liu, and C. J. Wu, “New dynamic models of lead-acidbatteries,” IEE Proc.-Gener. Trans. Distrib., vol. 142, no. 4, pp. 429–435,Jul. 1995.
[17] P. B. Eriksen, T. Ackermann, H. Abildgaard, P. Smith, W. Winter, andJ. M. Rodriguez Garcia, “System operation with high wind penetration,”IEEE Power Energy Manag., vol. 3, no. 6, pp. 65–74, Nov.–Dec. 2005.
[18] Y. Lei, A. Mullane, G. Lightbody, and R. Yacamini, “Modeling of thewind turbine with a doubly fed induction generator for grid integrationstudies,” IEEE Trans. Energy Conversion, vol. 21, no. 1, pp. 257–264,Mar. 2006.

26 IEEE SYSTEMS JOURNAL, VOL. 6, NO. 1, MARCH 2012
[19] M. Yamamoto and O. Motoyoshi, “Active and reactive power controlfor doubly-fed wound rotor induction generator,” IEEE Trans. PowerElectron., vol. 6, no. 4, pp. 624–629, Oct. 1991.
[20] F. M. Hughes, O. Anaya-Lara, N. Jenkins, and G. Strbac, “Control ofDFIG-based wind generation for power network support,” IEEE Trans.Power Syst., vol. 20, no. 4, pp. 1958–1966, Nov. 2005.
[21] J. Morren and S. W. H. de Haan, “Ridethrough of wind turbineswith doubly-fed induction generator during a voltage dip,” IEEE Trans.Energy Conversion, vol. 20, no. 2, pp. 435–441, Jun. 2005.
[22] F. Mei and B. C. Pal, “Modal analysis of grid connected doubly fedinduction generator,” IEEE Trans. Energy Conversion, vol. 22, no. 3,pp. 728–736, Sep. 2007.
[23] S. K. Salman and A. L. J. Teo, “Windmill modeling consideration andfactors influencing the stability of a grid-connected wind power basedembedded generator,” IEEE Trans. Power Syst., vol. 18, no. 2, pp. 793–802, May 2003.
[24] F. M. Hughes, O. A. Lara, N. Jenkins, and G. Strbac, “A power systemstabilizer for DFIG-based wind generation,” IEEE Trans. Power Syst.,vol. 21, no. 2, pp. 763–772, May 2006.
[25] K. M. Passino, “Biomimicry of bacterial foraging for distributed op-timization and control,” IEEE Control Syst. Mag., vol. 22, no. 3, pp.52–67, Jun. 2002.
[26] S. Mishra, M. Tripathy, and J. Nanda, “Multimachine power systemstabilizer design by rule based bacteria foraging,” Electric. Power Syst.Res., vol. 77, no. 12, pp. 1595–1607, Oct. 2006.
[27] S. Mishra, “A hybrid least square-fuzzy bacteria foraging strategy forharmonic estimation,” IEEE Trans. Evol. Comput., vol. 9, no. 1, pp.61–73, Feb. 2005.
[28] F. Wu, X. P. Zhang, K. Godfrey, and P. Ju, “Small signal stabilityanalysis and optimal control of a wind turbine with doubly fed inductiongenerator,” IEE Proc.-Gener. Trans. Distrib., vol. 1, no. 5, pp. 751–760,2007.
[29] M. A. Abido, “Optimal design of power system stabilizers using particleswarm optimization,” IEEE Trans. Energy Conversion, vol. 17, no. 3,pp. 406–413, Sep. 2002.
[30] D. H. Wolpert and W. G. Macready, “No free lunch theorems ofoptimization,” IEEE Trans. Evol. Comput., vol. 1, no. 1, pp. 67–82,Feb. 1997.
[31] S. Mishra, “Hybrid least-square adaptive bacteria foraging strategy forharmonic estimation,” IEE Proc.-Gener. Trans. Distrib., vol. 152, no. 3,pp. 379–389, May 2005.
[32] M. Tripathy and S. Mishra, “Bacteria foraging-based solution to op-timize both real power loss and voltage stability limit,” IEEE Trans.Power Syst., vol. 22, no. 1, pp. 240–248, Feb. 2007.
[33] Y. Mishra, S. Mishra, M. Tripathy, N. Senroy, and Z. Y. Dong, “Improv-ing stability of a DFIG based wind power system with tuned dampingcontroller,” IEEE Trans. Energy Conversion, vol. 24, no. 3, pp. 650–660,Sep. 2009.
Y. Mishra (M’09) received the B.E. degree fromthe Birla Institute of Technology Mesra, Ranchi,Jharkhand, India, in 2003, the M.Tech. degree fromthe Indian Institute of Technology Delhi, New Delhi,India, in 2005, and the Ph.D. degree from theUniversity of Queensland, Brisbane, Australia, in2009.
For six months, he was a Visiting Scholar with theUniversity of Tennessee, Knoxville. He is currently aTransmission Planning Engineer with Midwest ISO,Carmel, IN. His current research interests include
distributed generation, doubly fed induction generator-based wind generationsystems, and power system stability and control.
S. Mishra (M’97–SM’04) received the B.E. degreefrom the University College of Engineering, Burla,Orissa, India, in 1990, and the M.E. and Ph.D. de-grees from Regional Engineering College, Rourkela,Orissa, in 1992 and 2000, respectively.
In 1992, he joined the Department of ElectricalEngineering, University College of Engineering, asa Lecturer and, subsequently, became a Reader in2001. Presently, he is an Associate Professor withthe Department of Electrical Engineering, IndianInstitute of Technology Delhi, New Delhi, India. His
current research interests include soft computing applications to power systemcontrol, power quality, and renewable energy.
Dr. Mishra has been honored with many prestigious awards, such as INSAYoung Scientist Medal in 2002, INAE Young Engineer’s Award in 2002, andrecognition as the DST Young Scientist in 2001–2002. He is a fellow ofthe Indian National Academy of Engineering, New Delhi, the Institution ofEngineering and Technology, London, U.K., and the Institution of Electronicsand Communication Engineering, India.
Fangxing Li (M’01–SM’05), also known as Fran Li,received the B.S. and M.S. degrees from SoutheastUniversity, Nanjing, China, in 1994 and 1997, re-spectively, and the Ph.D. degree from Virginia Tech,Blacksburg, in 2001.
From 2001 to 2005, he was a Senior and thena Principal Engineer with ABB Electrical SystemConsulting, Raleigh, NC. He joined the Universityof Tennessee, Knoxville, in August 2005, where heis currently an Associate Professor. His current re-search interests include renewable energy integration
and smart grid, distributed energy resources, and power markets.Dr. Li is a Registered Professional Engineer in North Carolina.














![fli6«o dfgj clwsf/ cfof]usf] · 2019-03-25 · /fli6«o dfgj clwsf/ cfof]usf] jflif{s k|ltj]bg -@)&$—@)&%_ /fli6«o dfgj clwsf/ cfof]u xl/x/ejg, nlntk'/, g]kfn](https://img.pdfslide.us/doc/110x75/5e5d6f45b3499c79f90018a1/fli6o-dfgj-clwsf-cfofusf-2019-03-25-fli6o-dfgj-clwsf-cfofusf-jflifs.jpg)
![fli6«o vfB ;'/Iffsf] ;Gbe{df eld,dT:oIf]q tyf jgh+unsf](https://img.pdfslide.us/doc/110x75/62767cf0c06c7460756a6c45/fli6o-vfb-iffsf-gbedf-elddtoifq-tyf-jghunsf-.jpg)




![g]kfn ;/sf/ /fli6«o ;ts{tf s]Gb| - nvc.gov.np](https://img.pdfslide.us/doc/110x75/621deed6869df322952c3884/gkfn-sf-fli6o-tstf-sgb-nvcgovnp.jpg)