Embed Size (px)
DESCRIPTION
Actuator
Citation preview

S B SINGH ROLL NO 17
SAKEC, MUMBAI
INTRODUCTION
Actuators are the muscles of robots.
Electric motors
Servomotors
Stepper motors
Direct-drive electric motors
Hydraulic actuators
Pneumatic actuators
Shape memory metal actuators
Magnetostrictive actuators

INTRODUCTION

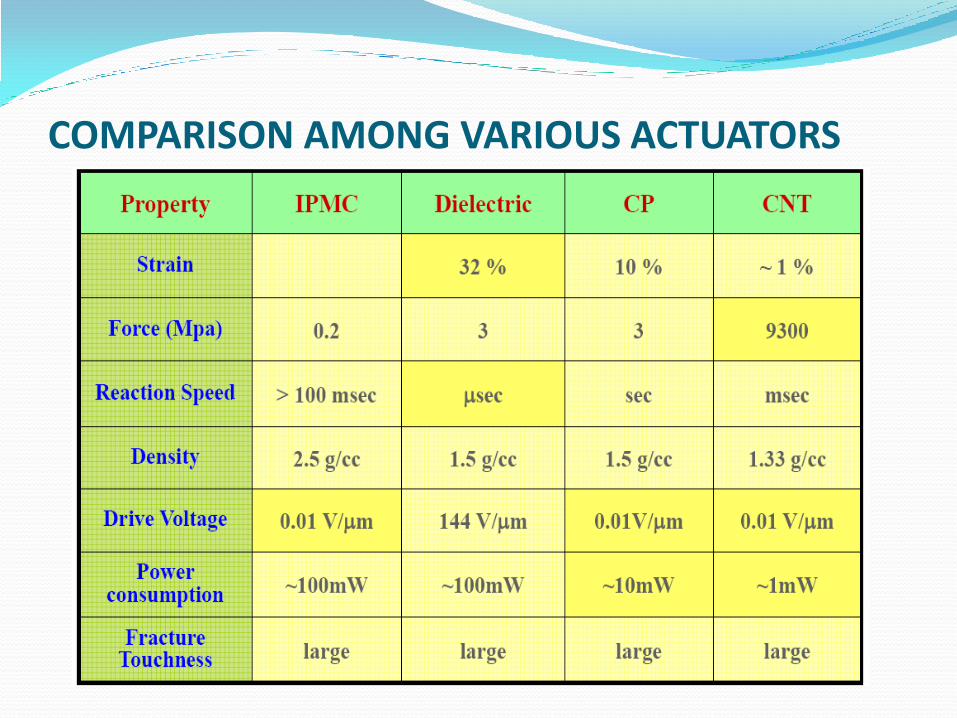
COMPARISON AMONG VARIOUS ACTUATORS
COMPARISON AMONG VARIOUS ACTUATORS
CHARACTERISTICS OF ACUATING SYSTEM
Characteristics of actuating system is criteria of selecting the kind of actuator.
Weight, Power-to-Weight Ratio, Operating Pressure
• The weight of the actuating system and Power-to-Weight Ratio is important.
• Pneumatic and hydraulic system are composed of two system,
actuating system and power system.
Stiffness vs. Compliance
Use of Reduction Gears
• To increase the torque and make it to slow it down to manageable speeds.
• It increase the cost, number of parts, backlash, inertia of the rotating body and resolution of the system.
CHARACTERISTICS OF ACUATING SYSTEM
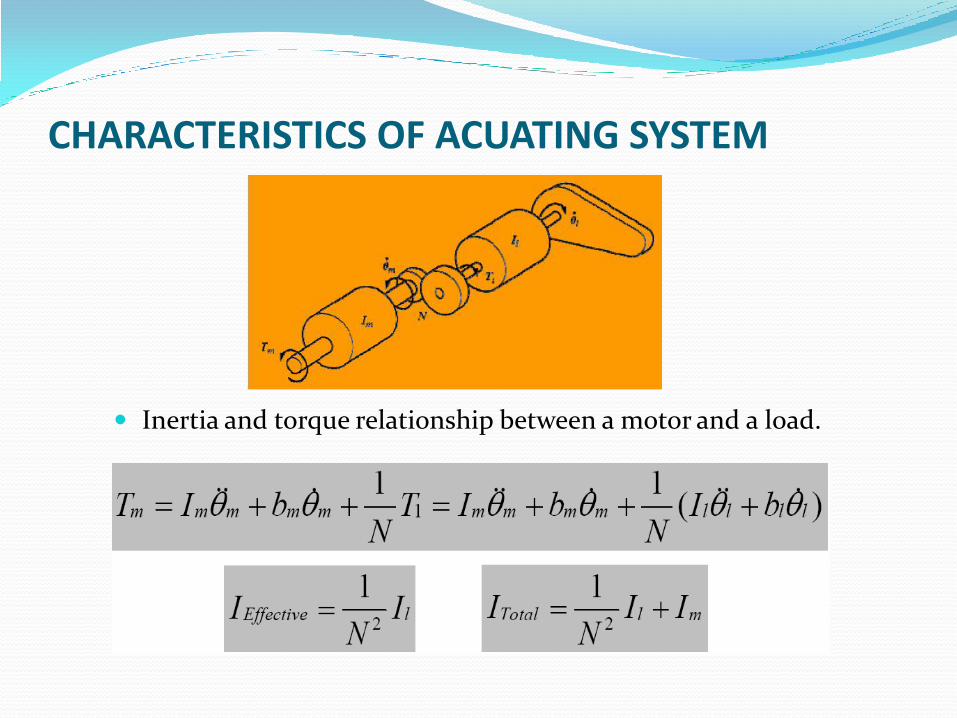
Inertia and torque relationship between a motor and a load.
HYDRAULIC ACTUATOR
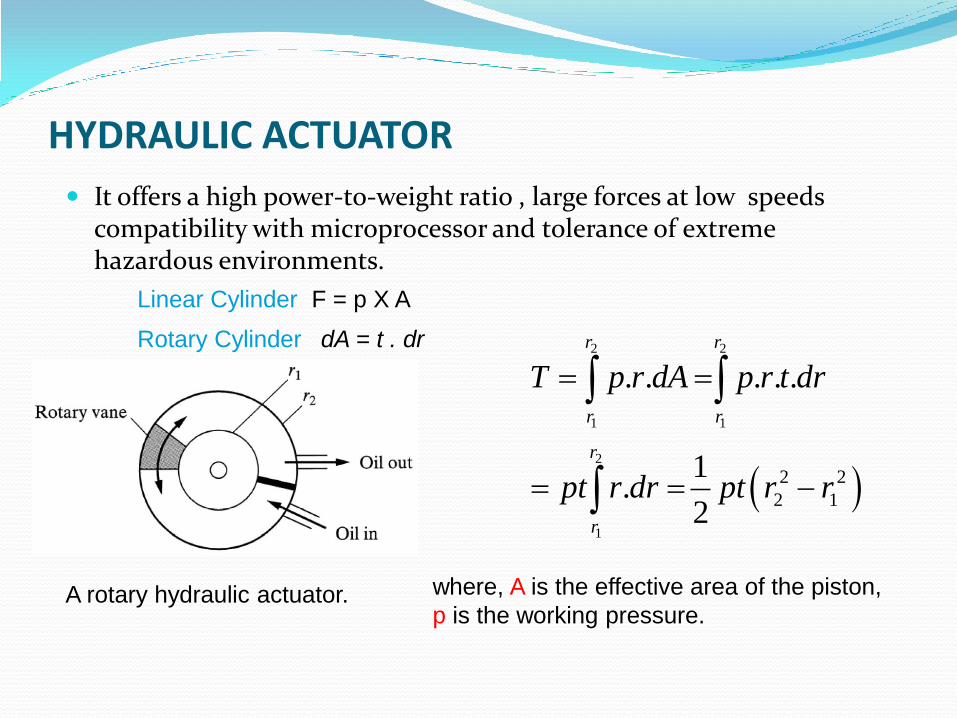
It offers a high power-to-weight ratio , large forces at low speeds compatibility with microprocessor and tolerance of extreme hazardous environments.
Linear Cylinder F = p X A
Rotary Cylinder dA = t . dr
2 2
1 1
2
1
2 2
2 1
. . . . .
1.
2
r r
r r
r
r
T p r dA p r t dr
pt r dr pt r r
where, A is the effective area of the piston,
p is the working pressure. A rotary hydraulic actuator.

HYDRAULIC ACTUATOR
where, q is the flow rate, C is a constant, x is the spool’s displacement, y is piston’s displacement and A is the area of the piston (d/dt denoted as D).
( ) ( ) ( )
q Cx
q dt d vol A dy
Cx dt A dy
Cy x
AD
Schematic of a hydraulic system and its components. Schematic of a spool
valve in neutral position.
PNEUMATIC DEVICES It is very similar to hydraulic
system, but power-to-weight ratio is much lower than hydraulic system.
Because the air is compressible, it compressed and deforms under load.
Differential valve makes the pneumatic cylinder position-controlled
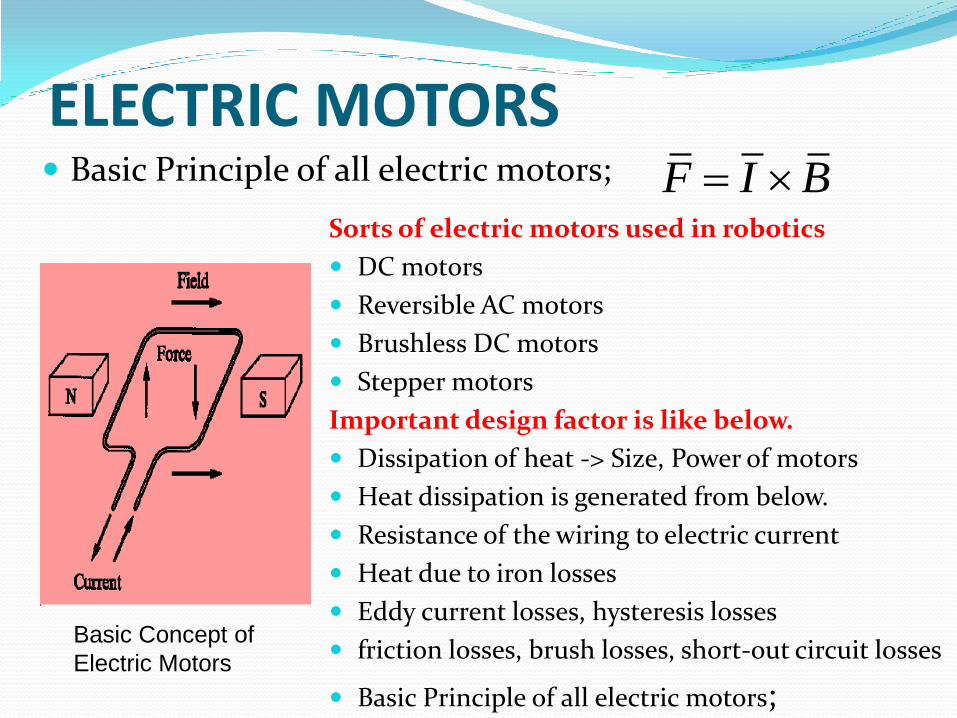
ELECTRIC MOTORS
Sorts of electric motors used in robotics
DC motors
Reversible AC motors
Brushless DC motors
Stepper motors
Important design factor is like below.
Dissipation of heat -> Size, Power of motors
Heat dissipation is generated from below.
Resistance of the wiring to electric current
Heat due to iron losses
Eddy current losses, hysteresis losses
friction losses, brush losses, short-out circuit losses
Basic Principle of all electric motors;
Basic Principle of all electric motors; F I B
Basic Concept of
Electric Motors
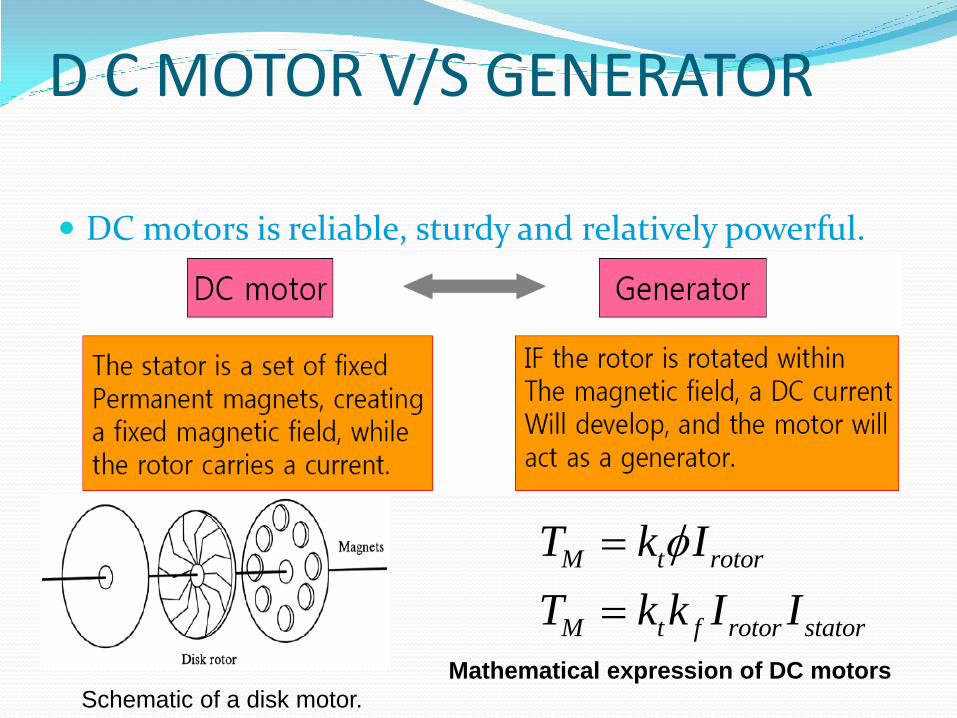
D C MOTOR V/S GENERATOR DC motors is reliable, sturdy and relatively powerful.
Schematic of a disk motor.
M t rotor
M t f rotor stator
T k I
T k k I I
Mathematical expression of DC motors

AC Motors The changing flux is provided by the AC current(60Hz) and
commutators and brushes are eliminated.
AC motors can dissipate heat more favorable than DC motors, yielding
more power.
Brushless DC Motors This types of motors are a hybrid between AC motors and DC motors.
It is not necessary that line frequency as 60Hz.
For smooth operation and almost constant torque, the rotor usually
has three phases in it.
Direct-Drive Electric Motors These motors are designed to deliver a very large torque at very low
speeds and with very high resolution, but to be used directly with a joint
without any gear reduction.
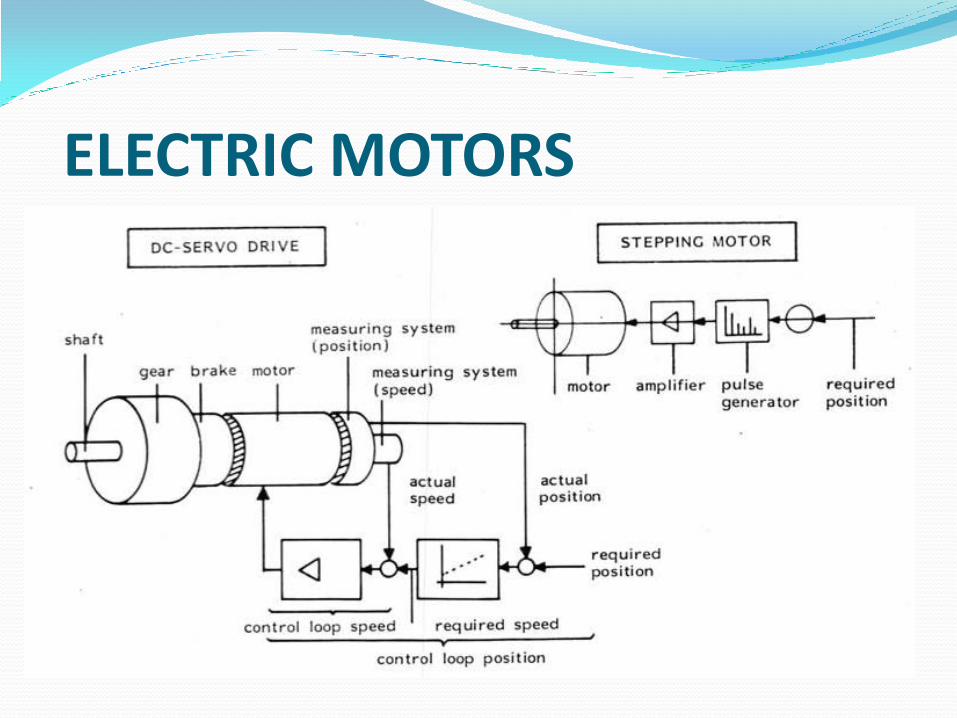
ELECTRIC MOTORS
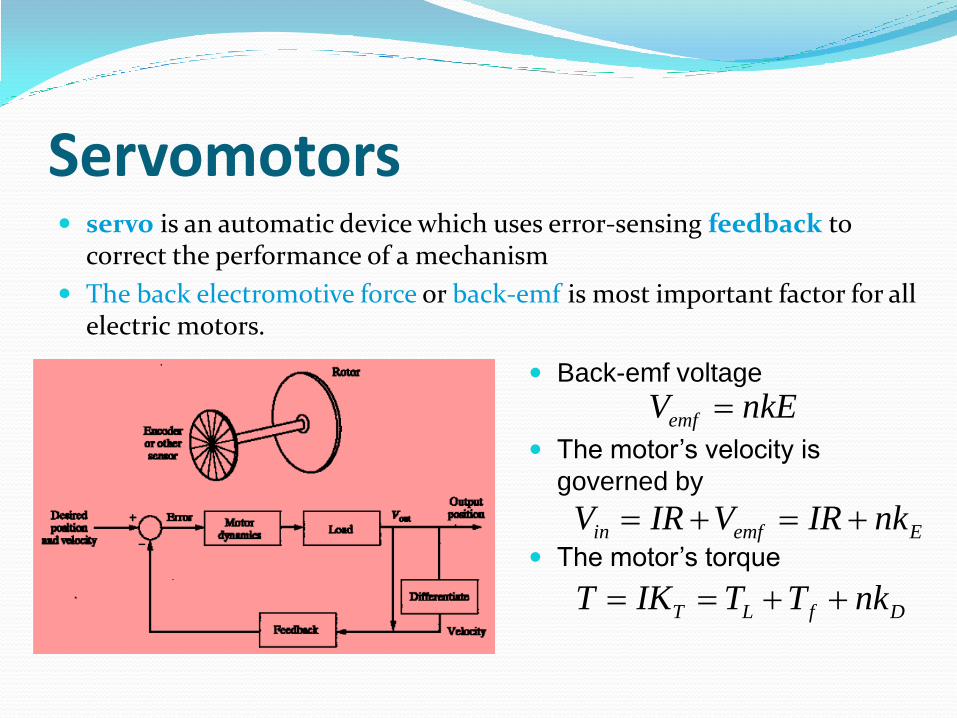
Servomotors servo is an automatic device which uses error-sensing feedback to
correct the performance of a mechanism
The back electromotive force or back-emf is most important factor for all electric motors.
Back-emf voltage
The motor’s velocity is
governed by
The motor’s torque
emfV nkE
in emf EV IR V IR nk
T L f DT IK T T nk

Stepper motors Stepper motors are long-lasting, versatile and used without feedback.
It has permanent magnet rotors and multiple winding stator housing.
Most industrial steppers run between 1.8 to 7.5 degrees at full stepping.
The number of poles means more precise resolution, but it has physical limitation.

MICROPROCESSOR CONTROL OF ELECTRIC MOTORS A robot is supposed to be a manipulator that is controlled by
computers or microprocessor and actuated by the electric motors with controller, which
Pulse Width Modulation
PWM is used for DC motor speed control with microprocessors.
It requires only high voltage(5V) and one output bit.
Average output voltage of PWM is like below. is computer or microprocessor.
PWM timing Sine wave generation with PWM
1out CC
tV V
t
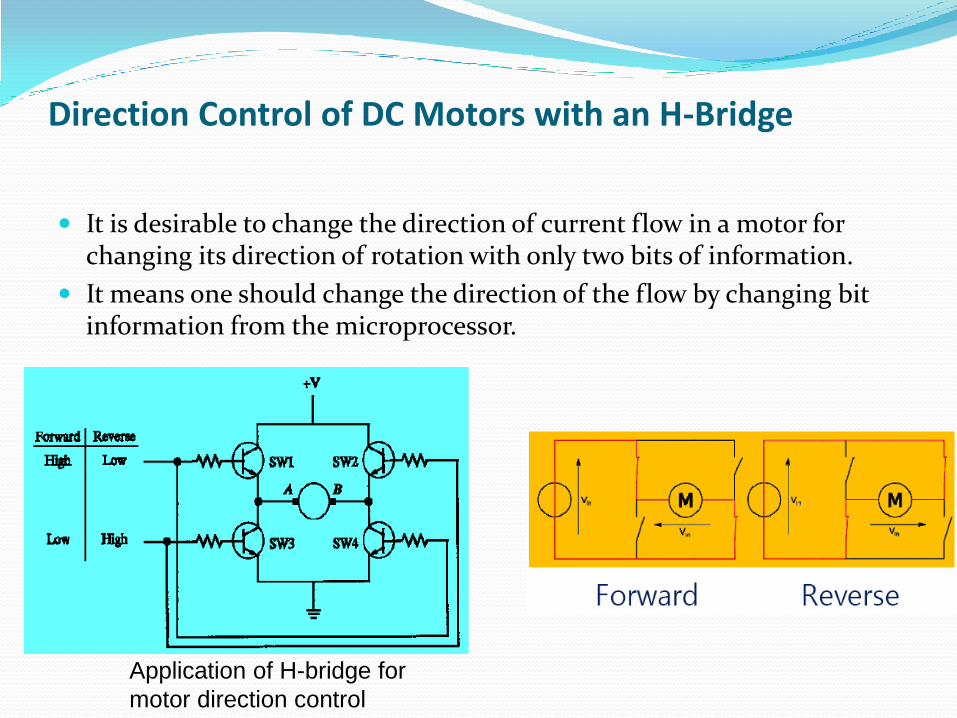
Direction Control of DC Motors with an H-Bridge
It is desirable to change the direction of current flow in a motor for changing its direction of rotation with only two bits of information.
It means one should change the direction of the flow by changing bit information from the microprocessor.
Application of H-bridge for
motor direction control

ACTUATORS MAGNETROSTRICTIVE ACTUATORS
A terfenol-D is placed near a magnet, this special rare-earth-iron material will change its shape slightly, which is called magnetostriction effect and is used to make linear motors with micro inches displacement.
SHAPE-MEMORY-TYPE METALS
One particular metal alloy, called Biometal shortens about 4% when it reaches a certain temperature.
The major disadvantage of the wire is that the total strain happens within a very small temperature range and it is very difficult to accurately control the strain.

THANK YOU!!!





























