Embed Size (px)
Citation preview
Viscoplasticity model at ®nite deformations with combinedisotropic and kinematic hardening
Adnan Ibrahimbegovi�c a,*, Lot® Chor® b,1
a Ecole Normale Sup�erieure de Cachan=LMT, 61 av. du President Wilson, 94235 Cachan Cedex, Franceb Universit�e de Technologie de Compi�egne, Dept. GSM, bp-529, 60205 Compi�egne Cedex, France
Received 25 February 1999; accepted 25 October 1999
Abstract
In this work, we construct a phenomenological constitutive model of viscoplasticity at ®nite strains, which gener-
alizes the classical Perzyna or Duvaut±Lions models to ®nite strains. The latter is accomplished with a minimum
number of hypothesis, including the multiplicative decomposition of deformation gradient, a de®nition of the elastic
domain and ®nally a penalty-like, viscoplastic regularization of the principle of maximum plastic dissipation. The
model is extended to include the isotropic and kinematic hardening of Prager±Ziegler type. Numerical computation of
the viscoplastic ¯ow at ®nite strain is also discussed, along with the corresponding simpli®cation resulting from a
convenient choice of the logarithmic strain measure. Several illustrative numerical examples are presented in order to
demonstrate the ability of the proposed model to remove the de®ciencies of some currently used models. Ó 2000
Elsevier Science Ltd. All rights reserved.
Keywords: Viscoplasticity; Finite deformation; Kinematic hardening
1. Introduction
The main objective of this work is to develop a gen-
eral phenomenological model of plasticity at ®nite de-
formation, accounting for strain rate sensitivity as well as
isotropic and kinematic hardening e�ects. Since the
original viscoplasticity formulation of Ref. [1], the sub-
ject of hardening viscoplasticity in the regime of
small strains has fairly matured. Fundamental works of
Halphen and Nguyen [2], Moreau [3], Duvaut and Lions
[4], Nayroles [5] and Lemaitre and Chaboche [6], among
others, have provided a solid foundation for small strain
viscoplasticity in form of the variational inequality. This
point of view, strongly relying on convex analysis, has
also proved helpful in devising the computational strat-
egy based on the so-called catching up algorithm of
Moreau [3] and Nguyen [7], as an alternative to the radial
return algorithm of Wilkins [8] and Krieg and Krieg [9].
Extending these ideas to large strain analysis was
initially done in a somewhat ad-hoc manner, by using
hypo-plasticity models and simply replacing the stress
and strain from the small strain constitutive equation by
chosen stress and strain rates, respectively. It was soon
noticed that such an implementation leads to spurious
oscillations for some stress rates (e.g. Jaumann stress rate
in a simple shear test [10±12], potential problems with
kinematic hardening mechanics [13] and spurious energy
supply in a closed elastic strain path [14]. The main
reason for the forementioned de®ciencies of such a model
was traced to its incompatibility with the hyperelastic
behavior even in the absence of plastic deformation [15].
For this reason, the hypo-plasticity models of
this kind are currently getting abandoned in favor of
hyper-plasticity models, for which one can exploit the
kinematic hypothesis of Lee [16] and Mandel [17] on
multiplicative decomposition of deformation gradient in
Computers and Structures 77 (2000) 509±525
www.elsevier.com/locate/compstruc
* Corresponding author. Tel.: +33-1-4740-2239; fax: +33-1-
4740-2785.
E-mail address: [email protected] (A. IbrahimbegovicÂ).1 Graduate Research Assistant.
0045-7949/00/$ - see front matter Ó 2000 Elsevier Science Ltd. All rights reserved.
PII: S 0 0 4 5 - 7 9 4 9 ( 9 9 ) 0 0 2 3 2 - 1

elastic and inelastic part, to construct strain energy
function. The fact that one can construct the strain en-
ergy function for a large strain plasticity model was al-
ready recognized as early as 1965 [18]. However, it is
only with later works of Simo and Ortiz [19], Simo [20]
and Moran et al. [21], much inspired by related works of
Marsden and Hughes [22] on ®nite deformation elas-
ticity, that a sound formulation and numerical imple-
mentation of the ®nite deformation plasticity models
with strain energy are furnished. This was achieved at
the expense of raising signi®cantly the level of generality
and placing the developments in the framework of
manifolds. 2 The main advantage of the ®nite defor-
mation plasticity formulation of this kind with respect to
the hypo-plasticity formulation employed previously is
that the issue of stress or strain rates is completely cir-
cumvented by appealing to the notion of the Lee de-
rivative [22, p. 93].
It was shown more recently by Ibrahimbegovi�c [23]
that the complexity of tensor calculus on a manifold can
be signi®cantly reduced by extending to manifolds the
fundamental work of Hill [24] on the principal axis
representation of tensors, where manipulating the ten-
sors can be replaced by manipulating their principal
values, i.e. scalars. In order to simplify the numerical
implementation, the principal axis formulation of plas-
ticity can further be recast in the Euclidean setting, ei-
ther by choosing the unit matrix representation of the
metric tensor [25] or by assuming the Euclidean setting
at the outset [26]. It was also noted [27±30] that the
principal axis formulation in conjunction with the log-
arithmic ®nite strain measure can be used to formally
simplify the plastic ¯ow computation to the one, which
is employed in small strain case.
In this work, we take these considerations one step
further to develop a hardening viscoplasticity model. In
that respect, the contributions for which we believe to be
of special interest are
(i) A sound theoretical formulation of the ®nite de-
formation viscoplasticity model is developed from a
minimum number of hypotheses, including the multi-
plicative decomposition of deformation gradient, and a
general form of the strain energy constructed as an
isotropic function of the elastic strain measure. It is
shown that the standard thermodynamics consideration
and a penalty-like, viscoplastic regularization of the
principle of maximum plastic dissipation provide all the
corresponding constitutive and evolution equations for
the generalization of the classical models of Perzyna [1]
or Duvaut±Lions [4] to the ®nite strain regime.
(ii) The formulation is set in the space of principal
axis of the spatial strain measures, which splits the
geometrically nonlinear e�ects from the viscoplastic ¯ow
computation. The operator split method can be used to
exploit such a split and simplify the numerical imple-
mentation. In particular, choosing the logarithmic or
natural strain measure, the governing equations for the
viscoplastic ¯ow computation become formally the same
as those from small strain case. Due to isotropy of the
elastic response, the stress computation can also be
simpli®ed accordingly.
(iii) Careful thermodynamics consideration is given
to the isotropic and kinematic hardening phenomena,
with the latter generalizing the classical model of Prager
and Ziegler to ®nite strains. The principal axis setting
clearly illustrates the key feature of the kinematic
hardening model of this kind with the corresponding
strain-like hardening variable, which shares the same
eigenvectors with the viscoplastic strain.
The outline of this article is as follows: The governing
equations of the ®nite deformation perfect viscoplastic-
ity model are developed in Section 2 along with the
appropriate extensions of such model capable of han-
dling isotropic and kinematic hardening. In Section 3,
we discuss the numerical implementation of the model.
A number of selected numerical simulations are given in
Section 4. In Section 5, we give some closing remarks.
2. Theoretical formulation
2.1. Extending classical viscoplasticity to ®nite strains
We start our considerations by constructing a con-
venient extension of the classical Perzyna or Duvaut±
Lions-type, perfect viscoplasticity model to ®nite strain
regime. By generalizing the kinematic hypothesis of Lee
[16] and Mandel [17] to viscoplasticity, we assume that
the total deformation gradient, F, can be multiplica-
tively decomposed into elastic, Fe, and the viscoplastic
part, Fvp, i.e.
F � FeFvp: �1�
We note that Feÿ1 would unload elastically, the stress
in the neighborhood u�O�X�� in the deformed con®gu-
ration, which gives rise to a stress-free intermediate
con®guration. 3 On the contrary, Fvp acts as an internal
variable, which expresses the viscoplastic ¯ow or the
amount of dislocation of the crystal lattice. Therefore,
the process is de®ned as elastic if no change of Fvp would
take place.
2 See e.g. Ref. [22].
3 We note that the multiplicative decomposition of the
deformation gradient is de®ned only pointwise, so that the
intermediate `con®guration' does not necessarily represent a
collection of compatible neighborhoods.
510 A. Ibrahimbegovi�c, L. Chor® / Computers and Structures 77 (2000) 509±525

As indicated in Fig. 1, the multiplicative decompo-
sition of deformation gradient can be exploited to de®ne
various ®nite strain measures. The issues regarding the
optimal choice of the strains for the development of the
most general, anisotropic form of the plasticity model
have not yet been fully settled [31]. However, if one as-
sumes that the elastic response is isotropic, all the for-
mulations with di�erent strain measures become fully
equivalent [23]. Considering that the isotropy of elastic
response is quite an acceptable hypothesis for most
metals, we further pursue a development of one such
model of ®nite strain viscoplasticity.
If we assume that the elastic response is una�ected by
the amount of viscoplastic ¯ow, it further follows that
the elastic response can be described by a strain energy
function, w�Fe�. The isotropy of the elastic response thus
implies that such a strain energy function should be in-
variant under any change of coordinates in the inter-
mediate con®guration, Fe� ! FeQ, where Q is an
orthogonal matrix (i.e. QT � Qÿ1). The latter implies
that the strain energy should be constructed as a function
of the left Cauchy±Green elastic deformation tensor,
be � FeFeT: �2�
Namely, in seeking invariant form for w��� we need to
take
w�be�� � w Fe QQT|�{z�}I
FeT
0@ 1A � w�be�: �3�
We note in passing that in the absence of viscoplastic
¯ow �Fvp � I�, it follows from Eq. (1) that we can re-
cover from Eq. (2) the standard de®nition of the left
Cauchy±Green deformation tensor, which is exploited
[32] for constructing the spatial description of the ®nite
strain elasticity, but disguised as the Finger deformation
tensor, eF � 12�1ÿ FFT�.
Therefore, one can borrow the standard objectivity
requirement under the rigid body rotation superposed
on the deformed con®guration [32, p. 143], Fe� � QFe,
where QT � Qÿ1, to conclude that the strain energy
function should only depend on invariants of be,
w�Ii�be��.We show in this work that one should rather give the
preference to an alternative form of the strain energy
satisfying the invariance requirement, which is con-
structed in terms of elastic principal stretches kei , i.e. the
principal values of Fe,
w�kei �: �4�
In view of Eq. (2), the latter can be obtained by solving
the eigenvalue problem
behÿ �ke
i �21imi � 0; �5�
where mi are the principal vectors of be. Taking into
account the orthogonality of principal vectors
mi � mj � dij; dij � 1; i � j;0; i 6� j;
��6�
one can construct the spectral decomposition of be ac-
cording to
be �X3
i�1
�kei �2mi mi: �7�
The results in Eqs. (6) and (7), which are valid if all kei
take distinct values can easily be modi®ed [25] to ac-
count for the case when two or all three kei coincide.
In order to simplify the subsequent thermodynamics
considerations, we choose to replace the spatial with the
material representation of the theory. As shown by
Ibrahimbegovi�c [23], this is rather easy to achieve in the
chosen setting of principal axes; Namely, by multiplying
Eq. (5) by Fÿ1, and exploiting the de®nitions in Eqs. (1)
and (2), we can get
0 � Fÿ1beFÿTh
ÿ �kei �2Fÿ1FÿT
iFTmi
� �FvpTFvp�ÿ1h
ÿ �kei �2�FTF�ÿ1
iFTmi
� Gvph
ÿ �kei �2Cÿ1
ini; �8�
where C and Gvp are, respectively, the total and the vi-
scoplastic right Cauchy±Green deformation tensors
Gvp � �Cvp�ÿ1 � �FvpTFvp�ÿ1; C � FTF: �9�In Eq. (8), we de®ne the material form of the eigenvec-
tors as
ni � FTmi; �10�which satisfy induced orthogonality condition with re-
spect to C; Namely, it follows from Eq. (6) that
dij � mi � mj
� FÿTni � FÿTnj
� ni � Cÿ1nj: �11�
Fig. 1. Multiplicative decomposition of deformation gradient
and associated strain measures.
A. Ibrahimbegovi�c, L. Chor® / Computers and Structures 77 (2000) 509±525 511

We can see that the material form of the eigenvalue
problem in Eq. (5) does not a�ect the values of the
elastic principal stretches. Consequently, neither does it
a�ect the chosen strain energy function constructed in
terms of principal stretches
w�kei � � w�C;Gvp�: �12�
The standard thermodynamics considerations [33±35]
and the regularized form of the principle of maximum
plastic dissipation are su�cient to provide all the gov-
erning equations for the perfect viscoplasticity model.
Namely, for the material representation of the strain
energy in Eq. (12), we can state a purely mechanical
form of the dissipation inequality
0 6 D :� S � 12
_Cÿ oot
w�C;Gvp�
� S
ÿ 2
owoC
!� 12
_Cÿ 2ow
oGvp �1
2_Gvp; �13�
where S is the second Piola±Kirchho� stress tensor
[22,32] which in the context of elasticity forms an ener-
gy-conjugate pair with the Green±Lagrange strain,
E � 12�Cÿ I�.
In an elastic process, where no change in Fvp or,
according to de®nition in Eq. (9), no change in Gvp takes
place � _Gvp � 0�, it holds that D � 0, so that we can
compute the second Piola±Kirchho� stress by a mere
function evaluation, since
D � 0 ) S � 2owoC
: �14�
In view of Eq. (12), the latter can also be expressed in
principal axes as
S � 2X3
i�1
owoke
i
okei
oC: �15�
The last term in Eq. (15) can be computed from the
directional derivative with respect to C of the eigenvalue
statement in Eq. (8), to get
0 �ÿ 2kei
okei
oC� dC
� �Cÿ1ni ÿ �ke
i �2oCÿ1
oCni
� Gvph
ÿ �kei �2Cÿ1
idni: �16�
Scalar multiplying the last expression by nj and making
use of the eigenvector orthogonality in Eq. (11), along
with the standard result, 4 �oCÿ1=oC� � dC � Cÿ1 dCCÿ1,
we obtain
okei
oC� ke
i
2Cÿ1ni Cÿ1ni; �17�
which can be exploited to simplify the principal axis
representation of the second Piola±Kirchho� stress in
Eq. (15) to get
S �X3
i�1
owoke
i
kei Cÿ1ni Cÿ1ni: �18�
This last result can also be interpreted as the spectral
decomposition of the second Piola±Kirchho� tensor with
si � owoke
i
kei �19�
as its principal values. The latter can be computed by
solving the eigenvalue problem
�Sÿ siCÿ1�ni � 0: �20�
The directional derivative of the eigenvalue statement in
Eq. (8) with respect to Gvp results with
0 � dGvpni ÿ 2kei
okei
oGvp � dGvp
� �Cÿ1ni
� Gvph
ÿ �kei �2Cÿ1
idni
��� � nj
) okei
oGvp �1
2kei
ni ni: �21�
In view of the result in Eq. (17) and the last result, it
further follows that
okei
oC� Cÿ1 oke
i
oGvp Gvp: �22�
With this result on hand and the chain rule, we can
obtain that ow=oC � Cÿ1�ow=oGvp�Gvp, which allows us
to further simplify the dissipation inequality in Eq. (13)
for a viscoplastic process to get
0 < Dvp :� ÿCSGvpÿ1 � 12
_Gvp � ÿS � 12C _GvpGvpÿ1: �23�
In generalizing the classical viscoplasticity model of
over-stress type, we consider a process to be viscoplastic
for all the values of the stress outside the elastic domain
corresponding to a positive value of the function
/�S;C� � /�si� > 0: �24�The elastic domain is de®ned by the negative value of
Eq. (24), and its boundary is given by /�S;C� �/�si� � 0.
The evolution equation for the viscoplastic strain can
be deduced by appealing to the principle of maximum
plastic dissipation [36,37], which at a given deformed
con®guration (i.e. given value of �C) chooses the value of
stress, which would maximize the viscoplastic dissipation
outside of the elastic domain. The latter can be formu-
lated as an unconstrained minimization problem with
4 This result can easily be derived by computing the
directional derivative with respect to C of the identity I � Cÿ1C.
512 A. Ibrahimbegovi�c, L. Chor® / Computers and Structures 77 (2000) 509±525

Hvp�S� � ÿDvp�S� �P / S; �C� �� �
! min; �25�
where P�/���� is a penalty-like functional, which should
take zero value in the elastic domain and its boundary.
In accordance with the classical viscoplasticity models of
Perzyna [1] and Duvaut and Lions [4], the penalty-like
functional is chosen as
P�/���� �1
2g �/����2; / > 0;
0; / 6 0;
(�26�
where g is the viscosity parameter. It readily follows that
from Eq. (26) that the derivative of the chosen func-
tional can be written by using the Macauley bracket. 5
P0�/���� � 1
gh/���i :�
1g /���; / > 0;
0; / 6 0:
(�27�
With this result on hand, the minimization problem in
(25) can be solved resulting in
0 � oHvp
oS:� 1
2C _GvpGvpÿ1 � 1
gh/i o/
oS; �28�
which provides the desired evolution equation for the
viscoplastic strain
_Gvp � ÿ2h/ig
Cÿ1 o/oS
Gvp: �29�
The last result can be further simpli®ed if one resorts to
the principal axis representation, namely, the directional
derivative of the eigenvalue statement in Eq. (20) can be
computed to give
0 � dSni ÿ osi
oS� dS
� �Cÿ1ni � S
� ÿ siCÿ1�dni
�� � nj
) osi
oS� ni ni: �30�
In view of the principal axis representation of the
elastic domain in Eq. (24) and the last result a simple
application of the chain rule allows to recast the evolu-
tion equation for the viscoplastic strain as
_Gvp � ÿ2h/ig
X3
i�1
o/osi
Cÿ1ni
ni
!Gvp: �31�
Remark 1: isochoric viscoplastic ¯ow
If the boundary of the elastic domain is pressure in-
sensitive, so thatP3
i�1�o/=osi� � 0, one can show that
the viscoplastic deformation is isochoric. Namely, by
appealing to the notion of the exponential function of a
tensor [32] which states that the initial value problem
_X�0� � AX�0�; X�0� � I �32�
with A a given tensor, has exactly one solution
X�t� � exp�At� :�X1i�0
I
�� 1
n�tA�
�n
: �33�
This result can directly be applied to obtain the corre-
sponding exact solution of the evolution equation for
viscoplastic ¯ow in Eq. (31), after recalling that
Gvp�0� :� �FvpT�0�Fvp�0��ÿ1 � I, to get
Gvp�t� � exp
"ÿ 2h/ig
X3
i�1
o/osi
Cÿ1ni ni
#: �34�
It can further be shown [32, p. 227] that
det�exp�At�� � exp�tr�At��, which in application to Eq.
(34) leads to
det�Gvp�t�� � exp tr
"(ÿ 2h/ig
X3
i�1
o/osi
Cÿ1ni
� ni
�#)
� exp
(ÿ 2h/ig
X3
i�1
o/osi
): �35�
For any pressure insensitive form of the elastic domain
withP3
i�1�o/=osi� � 0, it follows from the last result
that
det Gvp�t� � 1 �36�
or, in other words, that the viscoplastic deformation
tensor is a unimodular tensor. In view of de®nition in
Eq. (9), it further follows that
det Fvp�t� � 1; �37�
which implies that the viscoplastic ¯ow is isochoric, or
that there is no change in plastic volume. We note in
closing this remark that the pressure insensitive form of
/��� can be de®ned in terms of deviatoric principal val-
ues
/�si�; si � si ÿ 1
3
X3
k�1
sk : �38�
2.2. Including isotropic and kinematic hardening
In order to increase the predictive capabilities of the
perfect viscoplasticity model at ®nite strains, we set in
this section to include the internal variables which could
handle the isotropic and kinematic hardening phenom-
ena. In particular, a strain-like scalar variable n is in-
troduced to handle the increase in since of the elastic
domain, i.e. isotropic hardening, and the strain-like
tensor variable N is introduced to handle the eventual
translation of the elastic domain.
5 The Macauley bracket ®lters out only the positive value of
function; i.e. hxi � x, x > 0 and hxi � 0, x 6 0.
A. Ibrahimbegovi�c, L. Chor® / Computers and Structures 77 (2000) 509±525 513

The strain energy function should thus be generalized
to include these two hardening variables as
~w�C;Gvp;N; n�: �39�For the subsequent considerations, we choose the
kinematic hardening model, which represents an ap-
propriate generalization to the ®nite strain regime of the
classical Prager±Ziegler kinematic hardening rule [37, p.
137], in that the kinematic hardening variable N is pro-
portional to the viscoplastic strain Gvp, i.e. N � cGvp,
where c is a constant. In the present setting of the
principal axes the latter can be formulated by postulat-
ing that N and Gvp share the same eigenvectors. There-
fore, in view of the results in Eqs. (8) and (9), we can
write
�Nÿ �zi�2Cÿ1�ni � 0; �40�where zi are the principal values of strain-like kinematic
hardening tensor.
With this result on hand, one can also provide the
principal axis representation of the strain energy as
w�kei ; zi; n� �41�
with respect to the principal axes ni shared by both Gvp
and N. Similar representations can also be given for the
new de®nition of the elastic domain in terms of
~/�C;S;A; q� � /�si; ai; q�; �42�where q is the isotropic hardening variable, conjugate to
n, whereas A is the kinematic hardening variable, i.e. the
back stress, with its principal values given as ai. In other
words, we can write that
�Aÿ aiCÿ1�ni � 0: �43�
The dissipation inequality in Eq. (13) corresponding to
the new form of the strain energy can be rewritten as
0 6 D :�S � 12
_Cÿ oot
~w�C;Gvp;N; n�
� S
ÿ 2
o ~woC
!� 12
_Cÿ 2o ~w
oGvp �1
2_Gvp
ÿ 2o ~woN� 12
_Nÿ o ~won� n: �44�
In an elastic process, where no change takes place
regarding internal variables, i.e. _Gvp � 0 � _Fvp � 0�,_N � 0 and n � 0, the dissipation vanishes, so that, we
again recover the constitutive equations for the second
Piola±Kirchho� stress as already obtained in Eq. (14).
Further, we can also de®ne the stress-like isotropic
hardening variables q by its constitutive equation
q � ÿ o ~won: �45�
For the selected generalization of the Prager±Ziegler
kinematic hardening model, the constitutive equations
for the back stress can be obtained by making use of the
principal axis representation as
A �X3
i�1
2owozi
ozi
oC
�X3
i�1
owozi
ziCÿ1ni Cÿ1ni; ai � ow
ozizi: �46�
In view of results in Eqs. (40) and (43) and previously
derived similar conclusion in Eq. (22), we can write that
ozi
oC� Cÿ1 ozi
oNN; �47�
which can be used to obtained a reduced form of the
dissipation inequality valid for a viscoplastic process
0 < Dvp :� ÿS � 12C _GvpGvpÿ1 ÿ A � 1
2C _NNÿ1 � qn: �48�
The principle of maximum plastic dissipation can
now be reformulated by using the corresponding form of
the elastic domain in Eq. (42), providing the evolution
equations of the internal variables
0 � oHvp
oS:� 1
2C _GvpGvpÿ1 � 1
gh ~/i o
~/oS
) _Gvp � ÿ2h ~/ig
Cÿ1 o ~/oS
Gvp; �49a�
0 � oHvp
oA:� 1
2C _NNÿ1 � 1
gh ~/i o
~/oA
) _N � ÿ2h ~/ig
Cÿ1 o ~/oA
N; �49b�
0 � oHvp
oq:� ÿn� 1
gh ~/i o
~/oq) _n � h
~/ig
o ~/oq: �49c�
The principal representation of the evolution equation
(49a) again takes the form as given in Eq. (31), whereas
the one in Eq. (49b) reduces to
_N � ÿ2h/ig
X3
i�1
o/oai
Cÿ1ni
ni
!N: �50�
Remark 2: kinematic hardening isochoric variable and
deviatoric back stress
The conclusion drawn in Remark 1 can readily be
extended to internal variables governing proposed ki-
nematic hardening model of the Prager±Ziegler type.
Namely, if the back stress featuring in the de®nition of
the elastic domain in Eq. (42) is deviatoric, with its
principal values a1 � a2 � a3 � 0, the corresponding
strain-like kinematic hardening variable N is a unimod-
ular tensor.
514 A. Ibrahimbegovi�c, L. Chor® / Computers and Structures 77 (2000) 509±525

Namely, by making use again of the exponential
function to compute the exact solution to evolution
equation (50) we get
N�t� � exp
"ÿ 2h/ig
X3
i�1
o/oai
Cÿ1ni
� ni
�#; �51�
which further implies that
det N�t� � exp tr
"(ÿ 2h/ig
X3
i�1
o/oai
Cÿ1ni
� ni
�#)
� exp
8>>><>>>:ÿ 2h/ig
X3
i�1
o/oai|���{z���}
�0
9>>>=>>>;� 1: �52�
2.3. Spatial description
All the governing equations of the proposed ®nite
strain viscoplasticity model with combined isotropic and
kinematic hardening can also be cast in spatial descrip-
tion, which turns out to provide a more convenient basis
for an e�cient numerical implementation. This is ac-
complished simply by exploiting the relationship be-
tween the spatial and the material form of the principal
vectors in Eq. (12) and reversing the operation that lead
us to replace the eigenvalue problem in Eq. (5) by its
counterpart in Eq. (8).
To that end, one ®rst have to de®ne the spatial rep-
resentation of the second Piola±Kirchho� stress in terms
of the Kirchho� stress
s � FSFT; �53�
which shares the same principal values si; Namely, from
Eq. (20) we can get
0 � Sÿ ÿ siC
ÿ1�ni jF�
� FSFT|��{z��}s
24 ÿ siF�FTF�ÿ1FT
#FÿTni|��{z��}
mi
� �sÿ si1�mi: �54�
The stress constitutive Eq. (18) can similarly be modi®ed
to get
s :� FSFT �X3
i�1
owoke
i
kei F�FTF�ÿ1
ni F�FTF�ÿ1ni
�X3
i�1
owoke
i
kei mi mi ) si � ow
okei
kei : �55�
The kinematic hardening strain-like variable can also be
written in spatial description with
z � FNFT; �56�which, by exploiting the result in (40), can easily be
shown to have the same principal vectors, since
0 � Nÿ ÿ z2
i Cÿ1�ni jF�
� FNFT|��{z��}z
24 ÿ z2i F�FTF�ÿ1FT
35FÿTni|��{z��}mi
� �zÿ z2i 1�mi: �57�
A similar spatial representation can be provided for
back-stress, since from Eq. (46) we get
a :� FAFT �X3
i�1
owozi
ziF�FTF�ÿ1ni F�FTF�ÿ1
ni
�X3
i�1
owozi
zimi mi ) ai � owozi
zi: �58�
By making use of the foregoing results we can ®nally
provide the spatial description of the evolution equa-
tions. In particular, it follows from Eq. (8) that one can
de®ne
be � FGvpFT: �59�The time derivative of the last equation can be readily
computed to obtain
_be � _FFÿ1FGvpFT � FGvpFTFÿT _FT � F _GvpFT
� lbe � belT � F _GvpFT; �60�where l � _FFÿ1 is the spatial velocity gradient. With this
result on hand we can provide the spatial representation
of the evolution Eq. (29) as
_be ÿ lbe ÿ belT � F _GvpFT
� ÿ2h/ig
X3
i�1
o/osi
FCÿ1ni niGvpFT
� ÿ2h/ig
X3
i�1
o/osi
F�FTF�ÿ1FT|���������{z���������}I
mi
mi FGvpFT|����{z����}be
� ÿ2h/ig
X3
i�1
o/osi
mi
mi
!be; �61�
where the results in Eqs. (12) and (59) were used. A
similar transformation can be performed for the evolu-
tion equation of kinematic hardening variable in Eq.
(50) to obtain
_zÿ lzÿ zlT � ÿ2h/ig
X3
i�1
o/oai
mi
mi
!z: �62�
A. Ibrahimbegovi�c, L. Chor® / Computers and Structures 77 (2000) 509±525 515

3. Numerical implementation
In summary of considerations given in the previous
section, we note that the internal state variables for the
presented viscoplasticity model in spatial representation
are: the left Cauchy±Green elastic deformation tensor,
be, the kinematic hardening tensor, z, and the isotropic
hardening scalar variable, n. The list of state variables
should be completed by the position vector in the de-
formed con®guration, u, which is used to compute the
total deformation gradient
F � �u;1 u;2 u;3�; �63�
where u;i denotes the partial derivative of the position
vector with respect to the corresponding coordinate, xi.
The central problem of the computational visco-
plasticity reduces to tracing the time histories of the state
variables: u�t�, be�t�, z�t� and n�t� in the time interval of
interest. The central problem is well posed, and it can be
solved by integrating the evolution equations in Eqs.
(49c), (61) and (62), accompanied by the weak form of
momentum balance equations. The latter is obtained by
using the principle of virtual power [38] as
G�u; be; z; n; _u� :�ZB
s � dÿ Gext � 0; �64�
where B is the material domain occupied by the body
and Gext is the external virtual power. The integral in Eq.
(64) is computed by using the ®nite element method and
the quadrature formulae (Gauss quadrature, [39,40]),
which, as elaborated upon by Ibrahimbegovi�c et al. [41],
allows the computation of the state variables to be re-
duced to a single quadrature point at the time. Consid-
ering further that one-step solution schemes are typically
used to carry out the computation, the central problem
of computational viscoplasticity can be restated as fol-
lows:
Central problem in computational viscoplasticity (8quadrature point)
Given : un � u�tn�; ben � be�tn�; zn � z�tn�;
nn � n�tn�;Dt � tn�1 ÿ tn > 0;
compute : un�1 � u�tn�1�; ben�1 � be�tn�1�;
zn�1 � z�tn�1�; nn�1 � n�tn�1�:
We note in passing that after having computed the
state variables at time tn�1, we can recover the corre-
sponding values of dependent variables: the stress ten-
sor, sn�1, the back-stress, an�1, the isotropic hardening
stress-like variable, qn�1, simply by using the constitutive
Eqs. (55), (58) and (45), respectively.
The central problem of computational viscoplasticity
is composed of a large number of local equations (one
set of internal variable evolution equations for each
quadrature point) and a single set of global equilibrium
Eq. (64). As ®rst shown by Simo and Ortiz [19], such a
structure can be exploited to simplify the computation
by employing the operator split procedure to separate
the local (pertaining to a quadrature point) and global
computational tasks.
3.1. Internal variable computations
For the purpose of the discussion to follow, we as-
sume that the position vector at time tn�1, un�1, is ob-
tained, by solving the momentum balance Eq. (64). This
can be carried out either by a direct or an iterative
method, independent on local solution step. We recall
again that the latter is the only global computation,
which a�ects all the displacement degrees of freedom
simultaneously. The remaining local computation can
then be started to obtain the corresponding values of
internal variables, by integrating the evolution Eqs.
(49c), (61) and (62). To this end, we have to examine two
possibilities. A simpler one is when the process remains
elastic i.e. h/i � 0 leading to
_be ÿ lbe ÿ belT � 0; be�0� � ben; �65�
_zÿ lzÿ zlT � 0; z�0� � zn; �66�
_n � 0; n�0� � nn; �67�
which de®nes the so-called elastic trial step.
It is immediately apparent that the exact solution of
the last equation can be obtained as
ntrialn�1 � nn: �68�
Although it is somewhat less apparent, we can also ob-
tain closed-form solutions for Eqs. (65) and (66).
Namely, by exploiting the result in Eq. (59), for a ®xed
value of the viscoplastic deformation, �Gvp, Eq. (65) can
be rewritten as
_be � oot
FGvpFT� � ��
�Gvp ; be�0� � ben :� FnGvp
n FTn :
�69�
We recall again the chosen ®xed value of the plastic
deformation is consistent with the assumption of the
trial step being elastic. By introducing the relative de-
formation gradient
f n�1 � Fn�1Fÿ1n ; �70�
the exact solution for the elastic trial left Cauchy±Green
strain can be obtained
be;trialn�1 � Fn�1Gvp
n FTn�1
� f n�1ben f T
n�1: �71�
516 A. Ibrahimbegovi�c, L. Chor® / Computers and Structures 77 (2000) 509±525

The computed value of the elastic strain is used to
devise the corresponding form of the eigenvalue problem
in Eq. (5),
be;trialn�1
hÿ �ke;trial
i;n�1 �21imtrial
n�1 � 0 �72�
leading to the trial values of elastic principal stretches,
ke;triali;n�1 , and the trial principal vectors, mtrial
n�1. The same
principal vectors are shared by the trial value of the
kinematic hardening tensor, ztrialn�1, while its principal
values are those from the previous step, ztriali;n�1 � zi;n.
Making use of the results in Eqs. (55), (58) and (45)
we can compute the corresponding trial values of the
Kirchho� stress, striali;n�1, and the back stress, atrial
i;n�1, and
isotropic hardening stress-like variable qtrialn�1. If the value
of / computed from Eq. (42) for so obtained trial values
is indeed negative or zero, i.e. if /�striali;n�1; a
triali;n�1; q
trialn�1� 6 0,
our guess for h/i � 0 was correct and the trial state can
be accepted as the ®nal state at time tn�1.
In the opposite case, if the trial value of / is positive,
we need to compute the true values of state variables
corresponding to modi®ed evolution equations
_be � ÿ 2
gh/i
X3
i�1
o/osi
mi
mi
!be; be�0� � be;trial
n�1 ; �73�
_z � ÿ 2
gh/i
X3
i�1
o/oai
mi
mi
!z; z�0� � ztrial
n�1; �74�
_n � h/ig
o/oq; n�0� � ntrial
n�1: �75�
We note that, in the spirit of the operator split method,
this kind of computation carries on from the computed
trial values.
An approximate ®rst-order solution to Eq. (75) can
be obtained by using the implicit, backward-Euler
scheme leading to
nn�1 � ntrialn�1 � cn�1
o/oq
����n�1
; �76�
where we denoted
cn�1 � h/n�1iDtg: �77�
Approximate ®rst-order solutions are also sought to
the evolution Eqs. (73) and (74), but as opposed to using
the backward-Euler scheme the exponential approxi-
mation is employed, as proposed earlier by Weber and
Anand [27], to get
ben�1 �
X3
i�1
exp
�"ÿ 2cn�1
o/osi
�mi;n�1 mi;n�1
#be;trial
n�1 ;
�78�
zn�1 �X3
i�1
exp
�"ÿ 2cn�1
o/oai
�mi;n�1 mi;n�1
#ztrial
n�1;
�79�where the orthogonality of the eigenvectors was ex-
ploited.
Further, from eigenvalue problems (5) and (57) writ-
ten at time tn�1, we can obtain the spectral decomposition
of the left Cauchy±Green elastic deformation tensor
ben�1 �
X3
i�1
�kei;n�1�2mi;n�1 mi;n�1 �80�
and the kinematic hardening strain tensor
zn�1 �X3
i�1
�zi;n�1�2mi;n�1 mi;n�1: �81�
Similar results can be written for the trial values of the
elastic strain and kinematic hardening variable, i.e.
be;trialn�1 �
X3
i�1
ke;triali;n�1
� �2
mtriali;n�1 mtrial
i;n�1; �82�
ztrialn�1 �
X3
i�1
ztriali;n�1
� �2
mtriali;n�1 mtrial
i;n�1: �83�
With these results on hand, we can devise the prin-
cipal axis representation of the exponential approxima-
tions (78) and (79). The latter, along with the uniqueness
of the spectral decomposition, implies that the trial and
®nal eigenvectors coincide, i.e.
mi;n�1 � mtriali;n�1 �84�
and that the trial values of elastic principal stretches and
kinematic hardening variables ought to be modi®ed ac-
cording to
�kei;n�1�2 � ke;trial
i;n�1
� �2
exp
�ÿ 2cn�1
o/osi
����n�1
�; i � 1; 2; 3
�85�
�zi;n�1�2 � ztriali;n�1
� �2
exp
�ÿ 2cn�1
o/oai
����n�1
�; i � 1; 2; 3:
�86�Introducingtheprincipal elastic logarithmicstretcheswith
�ei;n�1 � ln �ke
i;n�1�; �e;triali;n�1 � ln �ke;trial
i;n�1 � �87�
and the principal kinematic hardening logarithmic
strains with
ji;n�1 � ln �zi;n�1�; jtriali;n�1 � ln �ztrial
i;n�1� �88�
and taking logarithm at both sides of Eqs. (85) and (86),
we obtain
A. Ibrahimbegovi�c, L. Chor® / Computers and Structures 77 (2000) 509±525 517

�ei;n�1 � �e;trial
i;n�1 ÿ cn�1
o/osi
����n�1
; i � 1; 2; 3; �89�
ji;n�1 � jtriali;n�1 ÿ cn�1
o/oai
����n�1
; i � 1; 2; 3 �90�
Therefore, with the present principal axis formula-
tion of the ®nite deformation viscoplasticity, we recover
formally the same structure of the internal variable up-
dates as the one from the small deformation theory,
since the multiplicative updates can be replaced by the
additive ones.
In particular, following Ibrahimbegovi�c et al. [41],
the viscoplastic ¯ow computation can be carried out in a
systematic manner by grouping together the results in
Eqs. (76), (77), (89) and (90) to get
rn�1 :��e
i;n�1 ÿ �e;triali;n�1 � cn�1osi/n�1
ÿ gDt cn�1 � /n�1
ji;n�1 ÿ jtriali;n�1 � cn�1oai/n�1
ÿnn�1 � nn � cn�1oq/n�1
8>><>>:9>>=>>; � 0; i � 1; 2; 3:
�91�
In Eq. (91), we have to solve a set of nonlinear al-
gebraic equations with cn�1, nn�1, �ei;n�1 and ji;n�1,
(i � 1; 2; 3) as unknowns. As shown in the next section,
for certain forms of /, such a computation can be per-
formed in a very e�cient manner, by reducing the sys-
tem to a single scalar equation, which is solved
iteratively.
Once such iterative procedure has converged, we can
recover the corresponding values of the elastic strains by
reversing the procedure in Eqs. (87) and (80)
ben�1 �
X3
i�1
�exp��ei;n�1��2mtrial
i;n�1 mtriali;n�1 �92�
as well as the kinematic hardening variable by making
use of the results in Eqs. (88) and (81)
zn�1 �X3
i�1
�exp�ji;n�1��2mtriali;n�1 mtrial
i;n�1: �93�
The corresponding values of the Kirchho� stress and the
back stress and isotropic hardening variables can also be
obtained from the constitutive equations in (55) and
(58), respectively.
3.2. Model problem: ®nite strain version of classical
Perzyna or Duvaut±Lions viscoplasticity
The classical form of the elastic domain, corre-
sponding to J2-¯ow theory, can readily be adapted to
the present model. If we ®rst consider the perfect vi-
scoplasticity case, we can write
/�~si� :� ~s21
�� ~s2
2 � ~s23
�1=2
ÿ��23
qsy ; �94�
where ~si � si ÿ 13
P3k�1 sk
� �and sy is the elasticity limit
for a uniaxial stress state. It is easy to see that such a
form of / is pressure insensitive, withP3
i�1�o/=osi� � 0,
which according to Remark 1 will result in isochoric
viscoplastic ¯ow. If we take into account the isotropic
and kinematic hardening of Prager±Ziegler type, we
should modify / in Eq. (94) as
/�~si; ai; q� :� �~s1
h� a1�2 � �~s2 � a2�2 � �~s3 � a3�2
i1=2
ÿ��23
q�sy ÿ q�: �95�
The strain energy is chosen as a function of the loga-
rithmic strain measures, by separating the isochoric
(viscoplastic-strain-producing) part, form the spherical
part;
w�J e; ~kei ; zi; n� :� 1
2B�ln J e�2 � 1
22l �ln ~ke
1�2h
� �ln ~ke2�2 � �ln ~ke
3�2i� 1
2
2H3
� �ln z1�2h
� �ln z2�2 � �ln z3�2i
� v�n�; �96a�
where B is the bulk modulus, l is the shear modulus, H
is the kinematic hardening modulus and v�n� is the
chosen (nonlinear) law for isotropic hardening. In Eq.
(96a), we denoted
J e � ke1k
e2k
e3;
~kei � �J e�ÿ1=3
so that ~ke1~ke
2~ke
3 � 1: �96b�As shown by Ibrahimbegovi�c et al. [41], the visco-
plastic ¯ow computation (at each Gauss quadrature
point) can be reduced for such a model to a single
nonlinear algebraic equation in cn�1.
The iterative solution for this equation makes use
at each iteration �k� of the corresponding linearized
form
2l
�� 2
3k0�n�k�n�1�h
� Hi� g
Dt
�Dc�k�n�1 � /�k�n�1 ÿ
gDt
c�k�n�1:
�97�The stress computation can also be simpli®ed due to
a particular choice of the strain energy function in Eq.
(96a); Namely, by making use of one results [23]
oJ e=obe � 12J ebeÿ1, the spherical part of stress is com-
puted as
�s � 2ow���oJ e
oJ e
obe be
� ow���oJ e
J e1: �98�
518 A. Ibrahimbegovi�c, L. Chor® / Computers and Structures 77 (2000) 509±525
Similarly, it can easily be shown from Eqs. (5) and (96b)
that ~kei are the principal values of the unimodular part of
be, denoted as ~be � �J e�ÿ2=3be
~behÿ �~ke
i �21imi � 0: �99�
The deviatoric part of stress can then be computed as
~s � 2ow���o~ke
i
o~kei
~be
o~be
obe be
� 2ow���o~ke
i
1
2~kei
mi mi�J e�ÿ2=31
�ÿ 1
3be beÿ1
�be
� ow���o~ke
i
1
~kei
mi mi�23
be�: �100�
4. Numerical examples
In this section, we present several illustrative results
of numerical simulations. All the computations are
performed by a research version of the computer pro-
gram FEAP, written by Prof. R.L. Taylor at UC
Berkeley [39]. We employ a 4-node element, enriched by
a set of incompatible modes, as described in a recent
work of Ibrahimbegovi�c and Gharzeddine [18].
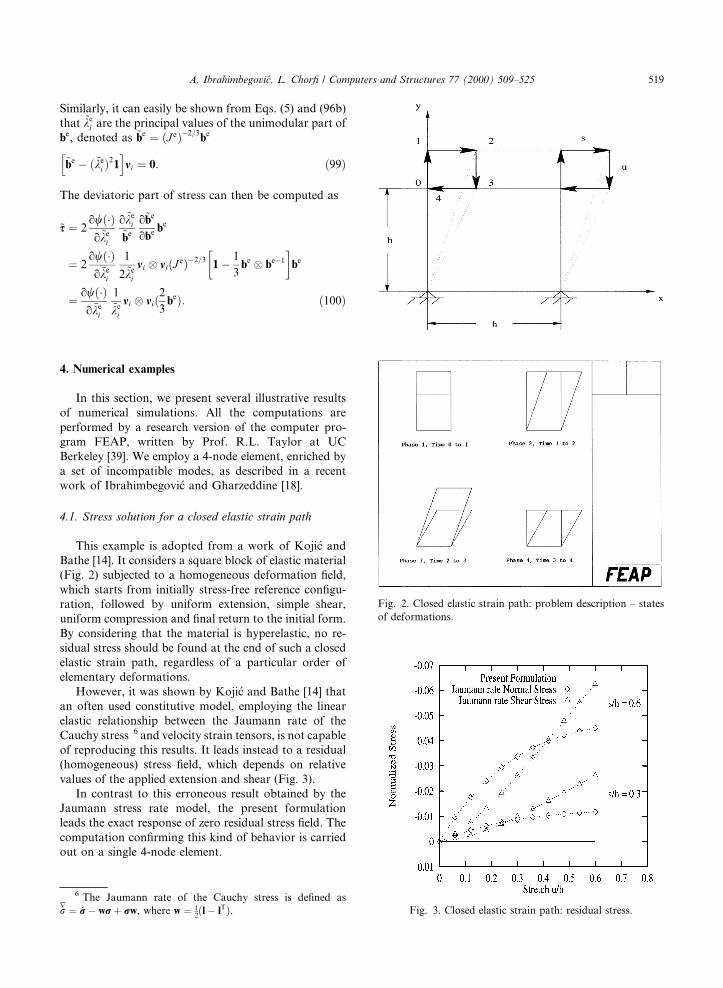
4.1. Stress solution for a closed elastic strain path
This example is adopted from a work of Koji�c and
Bathe [14]. It considers a square block of elastic material
(Fig. 2) subjected to a homogeneous deformation ®eld,
which starts from initially stress-free reference con®gu-
ration, followed by uniform extension, simple shear,
uniform compression and ®nal return to the initial form.
By considering that the material is hyperelastic, no re-
sidual stress should be found at the end of such a closed
elastic strain path, regardless of a particular order of
elementary deformations.
However, it was shown by Koji�c and Bathe [14] that
an often used constitutive model, employing the linear
elastic relationship between the Jaumann rate of the
Cauchy stress 6 and velocity strain tensors, is not capable
of reproducing this results. It leads instead to a residual
(homogeneous) stress ®eld, which depends on relative
values of the applied extension and shear (Fig. 3).
In contrast to this erroneous result obtained by the
Jaumann stress rate model, the present formulation
leads the exact response of zero residual stress ®eld. The
computation con®rming this kind of behavior is carried
out on a single 4-node element.
Fig. 2. Closed elastic strain path: problem description ± states
of deformations.
6 The Jaumann rate of the Cauchy stress is de®ned as
rr � _rÿ wr� rw, where w � 1
2�lÿ lT�. Fig. 3. Closed elastic strain path: residual stress.
A. Ibrahimbegovi�c, L. Chor® / Computers and Structures 77 (2000) 509±525 519
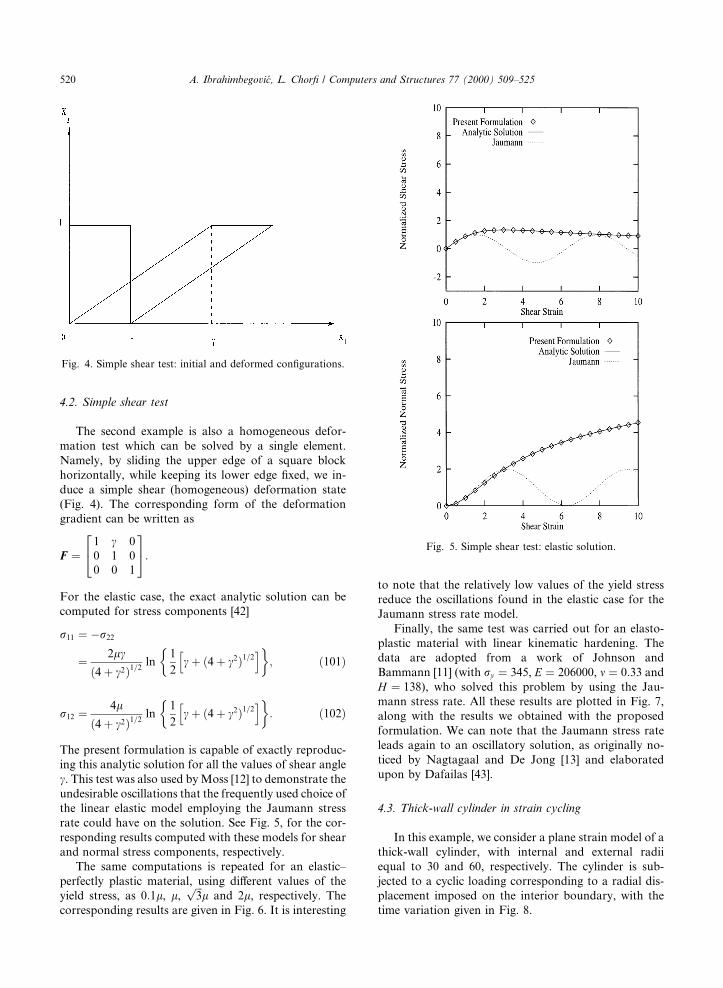
4.2. Simple shear test
The second example is also a homogeneous defor-
mation test which can be solved by a single element.
Namely, by sliding the upper edge of a square block
horizontally, while keeping its lower edge ®xed, we in-
duce a simple shear (homogeneous) deformation state
(Fig. 4). The corresponding form of the deformation
gradient can be written as
F �1 c 00 1 00 0 1
24 35:For the elastic case, the exact analytic solution can be
computed for stress components [42]
r11 � ÿr22
� 2lc
�4� c2�1=2ln
1
2ch�� �4� c2�1=2
i�; �101�
r12 � 4l
�4� c2�1=2ln
1
2ch�� �4� c2�1=2
i�: �102�
The present formulation is capable of exactly reproduc-
ing this analytic solution for all the values of shear angle
c. This test was also used by Moss [12] to demonstrate the
undesirable oscillations that the frequently used choice of
the linear elastic model employing the Jaumann stress
rate could have on the solution. See Fig. 5, for the cor-
responding results computed with these models for shear
and normal stress components, respectively.
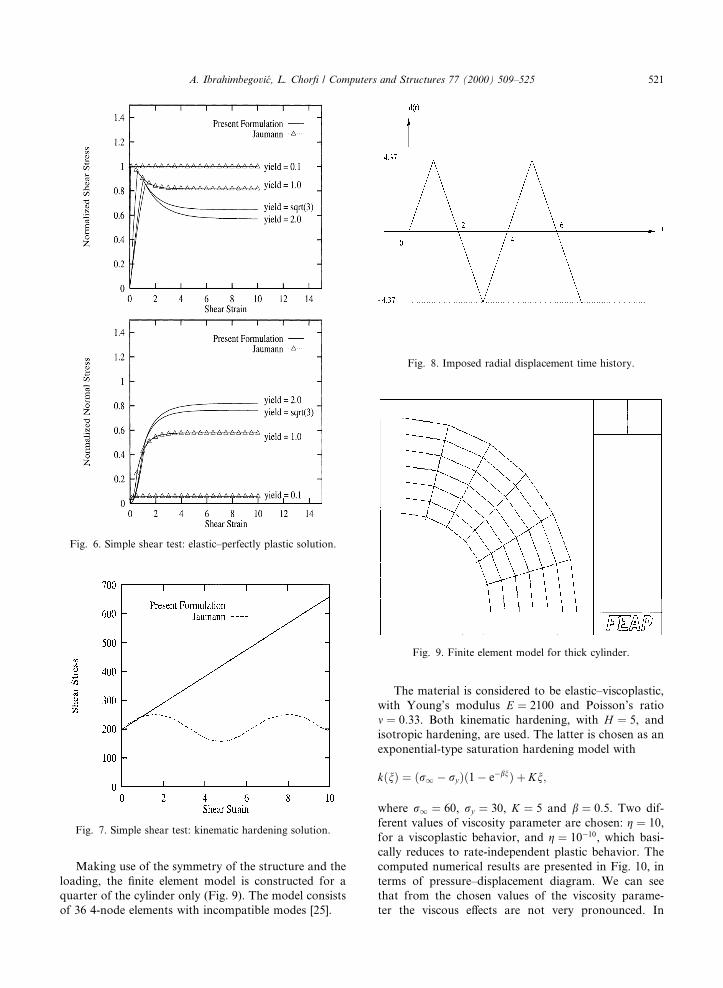
The same computations is repeated for an elastic±
perfectly plastic material, using di�erent values of the
yield stress, as 0:1l, l,���3p
l and 2l, respectively. The
corresponding results are given in Fig. 6. It is interesting
to note that the relatively low values of the yield stress
reduce the oscillations found in the elastic case for the
Jaumann stress rate model.
Finally, the same test was carried out for an elasto-
plastic material with linear kinematic hardening. The
data are adopted from a work of Johnson and
Bammann [11] (with ry � 345, E � 206000, m � 0:33 and
H � 138), who solved this problem by using the Jau-
mann stress rate. All these results are plotted in Fig. 7,
along with the results we obtained with the proposed
formulation. We can note that the Jaumann stress rate
leads again to an oscillatory solution, as originally no-
ticed by Nagtagaal and De Jong [13] and elaborated
upon by Dafailas [43].
4.3. Thick-wall cylinder in strain cycling
In this example, we consider a plane strain model of a
thick-wall cylinder, with internal and external radii
equal to 30 and 60, respectively. The cylinder is sub-
jected to a cyclic loading corresponding to a radial dis-
placement imposed on the interior boundary, with the
time variation given in Fig. 8.
Fig. 5. Simple shear test: elastic solution.
Fig. 4. Simple shear test: initial and deformed con®gurations.
520 A. Ibrahimbegovi�c, L. Chor® / Computers and Structures 77 (2000) 509±525
Making use of the symmetry of the structure and the
loading, the ®nite element model is constructed for a
quarter of the cylinder only (Fig. 9). The model consists
of 36 4-node elements with incompatible modes [25].
The material is considered to be elastic±viscoplastic,
with Young's modulus E � 2100 and Poisson's ratio
m � 0:33. Both kinematic hardening, with H � 5, and
isotropic hardening, are used. The latter is chosen as an
exponential-type saturation hardening model with
k�n� � �r1 ÿ ry��1ÿ eÿbn� � Kn;
where r1 � 60, ry � 30, K � 5 and b � 0:5. Two dif-
ferent values of viscosity parameter are chosen: g � 10,
for a viscoplastic behavior, and g � 10ÿ10, which basi-
cally reduces to rate-independent plastic behavior. The
computed numerical results are presented in Fig. 10, in
terms of pressure±displacement diagram. We can see
that from the chosen values of the viscosity parame-
ter the viscous e�ects are not very pronounced. In
Fig. 7. Simple shear test: kinematic hardening solution.
Fig. 8. Imposed radial displacement time history.
Fig. 9. Finite element model for thick cylinder.
Fig. 6. Simple shear test: elastic±perfectly plastic solution.
A. Ibrahimbegovi�c, L. Chor® / Computers and Structures 77 (2000) 509±525 521
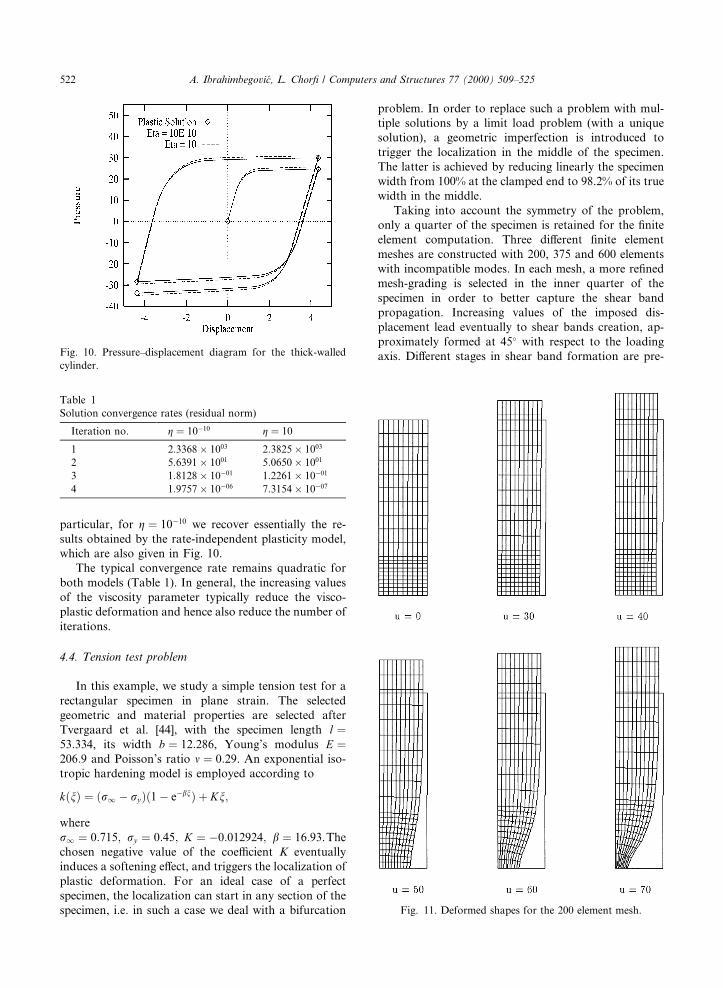
particular, for g � 10ÿ10 we recover essentially the re-
sults obtained by the rate-independent plasticity model,
which are also given in Fig. 10.
The typical convergence rate remains quadratic for
both models (Table 1). In general, the increasing values
of the viscosity parameter typically reduce the visco-
plastic deformation and hence also reduce the number of
iterations.
4.4. Tension test problem
In this example, we study a simple tension test for a
rectangular specimen in plane strain. The selected
geometric and material properties are selected after
Tvergaard et al. [44], with the specimen length l �53:334, its width b � 12:286, Young's modulus E �206:9 and Poisson's ratio m � 0:29. An exponential iso-
tropic hardening model is employed according to
k�n� � �r1 ÿ ry��1ÿ eÿbn� � Kn;
where
r1 � 0:715; ry � 0:45; K � ÿ0:012924; b � 16:93.The
chosen negative value of the coe�cient K eventually
induces a softening e�ect, and triggers the localization of
plastic deformation. For an ideal case of a perfect
specimen, the localization can start in any section of the
specimen, i.e. in such a case we deal with a bifurcation
problem. In order to replace such a problem with mul-
tiple solutions by a limit load problem (with a unique
solution), a geometric imperfection is introduced to
trigger the localization in the middle of the specimen.
The latter is achieved by reducing linearly the specimen
width from 100% at the clamped end to 98.2% of its true
width in the middle.
Taking into account the symmetry of the problem,
only a quarter of the specimen is retained for the ®nite
element computation. Three di�erent ®nite element
meshes are constructed with 200, 375 and 600 elements
with incompatible modes. In each mesh, a more re®ned
mesh-grading is selected in the inner quarter of the
specimen in order to better capture the shear band
propagation. Increasing values of the imposed dis-
placement lead eventually to shear bands creation, ap-
proximately formed at 45� with respect to the loading
axis. Di�erent stages in shear band formation are pre-
Fig. 11. Deformed shapes for the 200 element mesh.
Table 1
Solution convergence rates (residual norm)
Iteration no. g � 10ÿ10 g � 10
1 2:3368� 1003 2:3825� 1003
2 5:6391� 1001 5:0650� 1001
3 1:8128� 10ÿ01 1:2261� 10ÿ01
4 1:9757� 10ÿ06 7:3154� 10ÿ07
Fig. 10. Pressure±displacement diagram for the thick-walled
cylinder.
522 A. Ibrahimbegovi�c, L. Chor® / Computers and Structures 77 (2000) 509±525
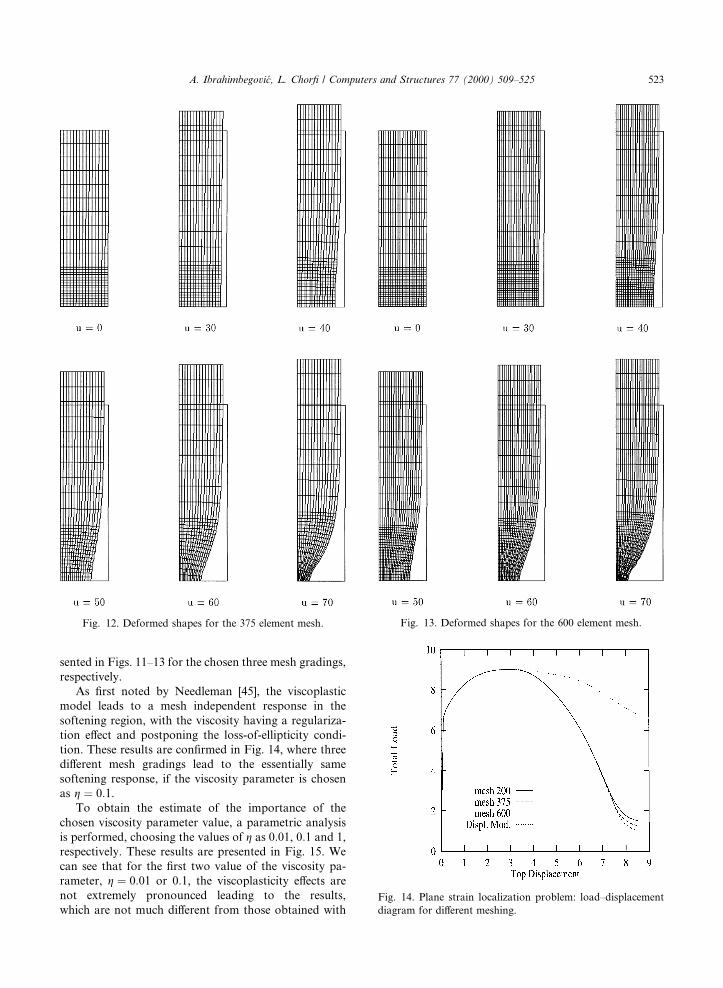
sented in Figs. 11±13 for the chosen three mesh gradings,
respectively.
As ®rst noted by Needleman [45], the viscoplastic
model leads to a mesh independent response in the
softening region, with the viscosity having a regulariza-
tion e�ect and postponing the loss-of-ellipticity condi-
tion. These results are con®rmed in Fig. 14, where three
di�erent mesh gradings lead to the essentially same
softening response, if the viscosity parameter is chosen
as g � 0:1.
To obtain the estimate of the importance of the
chosen viscosity parameter value, a parametric analysis
is performed, choosing the values of g as 0:01, 0:1 and 1,
respectively. These results are presented in Fig. 15. We
can see that for the ®rst two value of the viscosity pa-
rameter, g � 0:01 or 0:1, the viscoplasticity e�ects are
not extremely pronounced leading to the results,
which are not much di�erent from those obtained with
Fig. 12. Deformed shapes for the 375 element mesh. Fig. 13. Deformed shapes for the 600 element mesh.
Fig. 14. Plane strain localization problem: load±displacement
diagram for di�erent meshing.
A. Ibrahimbegovi�c, L. Chor® / Computers and Structures 77 (2000) 509±525 523
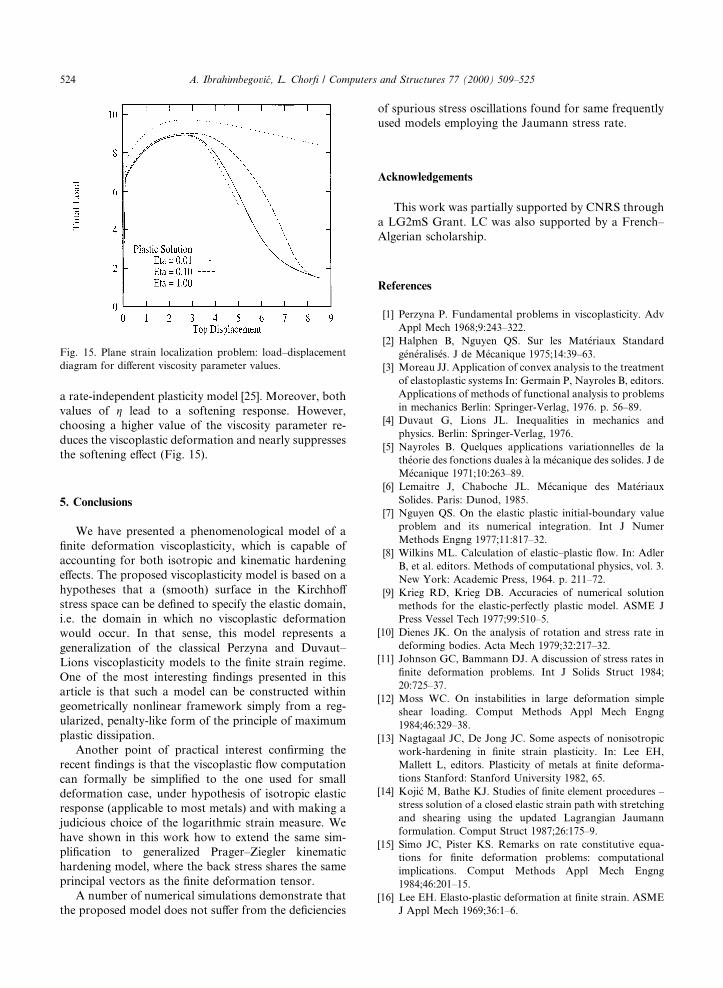
a rate-independent plasticity model [25]. Moreover, both
values of g lead to a softening response. However,
choosing a higher value of the viscosity parameter re-
duces the viscoplastic deformation and nearly suppresses
the softening e�ect (Fig. 15).
5. Conclusions
We have presented a phenomenological model of a
®nite deformation viscoplasticity, which is capable of
accounting for both isotropic and kinematic hardening
e�ects. The proposed viscoplasticity model is based on a
hypotheses that a (smooth) surface in the Kirchho�
stress space can be de®ned to specify the elastic domain,
i.e. the domain in which no viscoplastic deformation
would occur. In that sense, this model represents a
generalization of the classical Perzyna and Duvaut±
Lions viscoplasticity models to the ®nite strain regime.
One of the most interesting ®ndings presented in this
article is that such a model can be constructed within
geometrically nonlinear framework simply from a reg-
ularized, penalty-like form of the principle of maximum
plastic dissipation.
Another point of practical interest con®rming the
recent ®ndings is that the viscoplastic ¯ow computation
can formally be simpli®ed to the one used for small
deformation case, under hypothesis of isotropic elastic
response (applicable to most metals) and with making a
judicious choice of the logarithmic strain measure. We
have shown in this work how to extend the same sim-
pli®cation to generalized Prager±Ziegler kinematic
hardening model, where the back stress shares the same
principal vectors as the ®nite deformation tensor.
A number of numerical simulations demonstrate that
the proposed model does not su�er from the de®ciencies
of spurious stress oscillations found for same frequently
used models employing the Jaumann stress rate.
Acknowledgements
This work was partially supported by CNRS through
a LG2mS Grant. LC was also supported by a French±
Algerian scholarship.
References
[1] Perzyna P. Fundamental problems in viscoplasticity. Adv
Appl Mech 1968;9:243±322.
[2] Halphen B, Nguyen QS. Sur les Mat�eriaux Standard
g�en�eralis�es. J de M�ecanique 1975;14:39±63.
[3] Moreau JJ. Application of convex analysis to the treatment
of elastoplastic systems In: Germain P, Nayroles B, editors.
Applications of methods of functional analysis to problems
in mechanics Berlin: Springer-Verlag, 1976. p. 56±89.
[4] Duvaut G, Lions JL. Inequalities in mechanics and
physics. Berlin: Springer-Verlag, 1976.
[5] Nayroles B. Quelques applications variationnelles de la
th�eorie des fonctions duales �a la m�ecanique des solides. J de
M�ecanique 1971;10:263±89.
[6] Lemaitre J, Chaboche JL. M�ecanique des Mat�eriaux
Solides. Paris: Dunod, 1985.
[7] Nguyen QS. On the elastic plastic initial-boundary value
problem and its numerical integration. Int J Numer
Methods Engng 1977;11:817±32.
[8] Wilkins ML. Calculation of elastic±plastic ¯ow. In: Adler
B, et al. editors. Methods of computational physics, vol. 3.
New York: Academic Press, 1964. p. 211±72.
[9] Krieg RD, Krieg DB. Accuracies of numerical solution
methods for the elastic-perfectly plastic model. ASME J
Press Vessel Tech 1977;99:510±5.
[10] Dienes JK. On the analysis of rotation and stress rate in
deforming bodies. Acta Mech 1979;32:217±32.
[11] Johnson GC, Bammann DJ. A discussion of stress rates in
®nite deformation problems. Int J Solids Struct 1984;
20:725±37.
[12] Moss WC. On instabilities in large deformation simple
shear loading. Comput Methods Appl Mech Engng
1984;46:329±38.
[13] Nagtagaal JC, De Jong JC. Some aspects of nonisotropic
work-hardening in ®nite strain plasticity. In: Lee EH,
Mallett L, editors. Plasticity of metals at ®nite deforma-
tions Stanford: Stanford University 1982, 65.
[14] Koji�c M, Bathe KJ. Studies of ®nite element procedures ±
stress solution of a closed elastic strain path with stretching
and shearing using the updated Lagrangian Jaumann
formulation. Comput Struct 1987;26:175±9.
[15] Simo JC, Pister KS. Remarks on rate constitutive equa-
tions for ®nite deformation problems: computational
implications. Comput Methods Appl Mech Engng
1984;46:201±15.
[16] Lee EH. Elasto-plastic deformation at ®nite strain. ASME
J Appl Mech 1969;36:1±6.
Fig. 15. Plane strain localization problem: load±displacement
diagram for di�erent viscosity parameter values.
524 A. Ibrahimbegovi�c, L. Chor® / Computers and Structures 77 (2000) 509±525

[17] Mandel J. Plasticit�e classique et viscoplasticit�e. CISM
courses and lectures 97. Berlin: Springer-Verlag, 1971.
[18] Green AE, Naghdi PM. A general theory of an elasto-
plastic continuum. Arch Rat Mech Anal 1965;18:251±81.
[19] Simo JC, Ortiz M. A uni®ed approach to ®nite deforma-
tion elastoplastic analysis based on the use of hyperelastic
constitutive equations. Comput Mech Appl Mech Engng
1985;49:221±45.
[20] Simo JC. A framework for ®nite strain elastoplasticity
based on maximum plastic dissipation and multiplicative
decomposition. Part I: continuum formulation. Comput
Methods Appl Mech Engng 1988;66:199±219.
[21] Moran B, Ortiz M, Shi CF. Formulation of implicit ®nite
element methods for multiplicative ®nite deformation
plasticity. Int J Numer Methods Engng 1990;29:483±514.
[22] Marsden JE, Hughes TJR. Mathematical foundations of
elasticity. New Jersey: Prentice Hall, 1983.
[23] Ibrahimbegovi�c A. Equivalent Eulerian and Lagrangian
Formulation of Finite Deformation Elastoplasticity in
Principal Axes. Int J Solids Struct 1994;31:3027±40.
[24] Hill R. Aspects of invariance in solid mechanics. Advances
Appl Mech 1978;18:1±75.
[25] Ibrahimbegovi�c A, Gharzeddine F. Finite deformation
plasticity in principal axes: from a manifold to the
euclidean setting. Comput Methods Appl Mech Engng
1998;171:341±69.
[26] Simo JC. Algorithms for static and dynamic multiplicative
plasticity that preserve the classical return mapping
schemes of the in®nitesimal theory. Comput Methods
Appl Mech Engng 1992;99:61±112.
[27] Weber G, Anand L. Finite deformation constitutive
equations and a time integration procedure for isotropic,
hyperelastic-viscoplastic solids. Comput Methods Appl
Mech Engng 1990;79:173±202.
[28] Peri�c D, Owen DRJ, Honnor ME. A model for ®nite strain
elasto-plasticity based on logarithmic strains: computa-
tional issues. Comput Methods Appl Mech Engng 1992;
94:35±61.
[29] Eterovic AL, Bathe KJ. A hyperelastic-based large strain
elasto-plastic constitutive formulation with combined iso-
tropic-kinematic hardening using the logarithmic stress
and strain measures. Int J Numer Methods Engng 1990;
30:1099±114.
[30] Cuitino A, Ortiz M. A material-independent method for
extending stress update algorithms from small-strain plas-
ticity to ®nite plasticity with multiplicative kinematics.
Engng Comput 1992;9:437±51.
[31] Naghdi PM. A critical review of the state of ®nite
plasticity. J Appl Math Phys (ZAMP) 1990;41:315±94.
[32] Gurtin ME. An introduction to continuum mechanics.
New York: Academic Press, 1981.
[33] Coleman BD, Gurtin ME. Thermodynamics with internal
variables. J Chem Phys 1967;47:597±613.
[34] Germain P, Nguyen QS, Suquet P. Continuum thermody-
namics. ASME J Appl Mech 1983;50:1010±20.
[35] Maugin G. The thermomechanics of plasticity and frac-
ture. Cambridge: Cambridge University Press, 1992.
[36] Hill R. The mathematical theory of plasticity. London:
Oxford University Press, 1950.
[37] Lubliner J. A maximum-dissipation principle in general-
ized plasticity. Acta Mech 1984;52:225±37.
[38] Germain P. Duality and convection in continuum me-
chanics. In: Fichera G, et al. editors. Trends in Applica-
tions of Pure Mathematics to Mechanics, Pitman: London,
1976, pp.107±28.
[39] Zienkiewicz OC, Taylor RL. The ®nite element method:
basic formulation and linear problems. London: McGraw-
Hill, 1989.
[40] Bathe JK. Finite element procedures. New Jersey: Prentice
Hall, 1996.
[41] Ibrahimbegovi�c A, Gharzeddine F, Chor® L. Classical
plasticity and viscoplasticity models reformulated: theoret-
ical basis and numerical implementation. Int J Numer
Methods Engng 1998;42:1499±535.
[42] Ibrahimbegovi�c A. Finite elastoplastic deformations of
space-curved membranes. Comput Methods Appl Mech
Engng 1994;119:371±94.
[43] Dafailas YF. Corotational rates for kinematic hardening
at large plastic deformations. ASME J Appl Mech
1983;50:561±5.
[44] Tvergaard V, Needleman A, Lo KK. Flow localization in
the plane strain tensile test. J Mech Phys Solids 1981;
29:115±42.
[45] Needleman A. Material rate dependence and mesh sensi-
tivity in localization problems. Comput Methods Appl
Mech Engng 1988;67:69±85.
A. Ibrahimbegovi�c, L. Chor® / Computers and Structures 77 (2000) 509±525 525





























