Embed Size (px)
Citation preview

1
Throughput-Optimal Queue Length BasedCSMA/CA Algorithm for Cognitive Radio
Networks
Shuang Li, Student Member, IEEE, Eylem Ekici, Senior Member, IEEE,and Ness Shroff, Fellow, IEEE
Abstract—Cognitive Radio Networks allow unlicensedusers to access licensed spectrum opportunistically withoutdisrupting primary user (PU) communication. Developinga distributed implementation that can fully utilize thespectrum opportunities for secondary users (SUs) hasso far remained elusive. Although throughput optimalalgorithms based on the well-known Maximal WeightScheduling (MWS) algorithm exist for cognitive radio net-works, they require central processing of network-wide SUinformation. In this paper, a new distributed algorithm isintroduced that asymptotically achieves the capacity regionof the cognitive radio systems. The proposed algorithmachieves the full SU capacity region while adapting tothe channel availability dynamics caused by unknownPrimary User (PU) activity. Extensive simulation resultsare provided to illustrate the efficacy of the algorithm.
Index Terms—Cognitive Radio Networks, CSMA,throughput optimal, distributed.
I. INTRODUCTION
Cognitive radio networks (CRNs) allow unli-censed or secondary users to opportunistically ac-cess licensed spectra to improve the overall utiliza-tion of wireless resources and address the problemof spectrum shortage. The design of CRNs posesnew challenges that are not present in traditionalwireless networks [6]. SUs are allowed spectrumaccess only when they do not cause unacceptablelevels of interference to licensed or primary users(PUs). DARPA’s ‘Next Generation’ (XG) program[15] mandates that cognitive radios sense signals to
Shuang Li is with the Department of Computer Science andEngineering, Ohio State University, Columbus, OH, 43210 USA e-mail: [email protected]. This work has been funded by ARO MURIaward W911NF-08-1-0238.
Eylem Ekici is with the Department of Electrical and ComputerEngineering, Ohio State University, Columbus, OH, 43210 USA e-mail: [email protected].
Ness Shroff is with the Department of Electrical and ComputerEngineering and Computer Science and Engineering, Ohio StateUniversity, Columbus, OH, 43210 USA e-mail: [email protected].
prevent interference to existing military and civilianradio systems. On the other hand, IEEE regulatesunlicensed access to the TV spectrum without inter-ference, as described in the IEEE 802.22 standard[7]. These and other interference avoidance mech-anisms profoundly impact the design of algorithmsand protocols for cognitive radio networks.
The complete utilization of the so-called spectrumopportunities while avoiding interference on PUsis the goal of algorithm and protocol design forcognitive radio networks. In traditional wirelessnetworks, Maximum Weight Scheduling (MWS)algorithm [16] and its variants achieve the fullcapacity region of the network, where a schedulingpolicy is said to achieve the full capacity region(or be throughput optimal) [9] if it stabilizes thesystem for any arrival rate vector the system can bestabilized for by some scheduling policy. However,these algorithms require the knowledge of the entirenetwork state and centralized processing to computeconflict free schedules. Similar algorithms have alsobeen proposed for cognitive radio networks: In [17],opportunistic scheduling policies are developed formultichannel single-hop CRNs subject to maximumcollision rate constraints with PUs. In [18], schedul-ing algorithms are investigated in multi-channelmulti-hop CRN overlayed with a PU network. Theoptimal throughput can be provably and asymptot-ically achieved in adaptive-routing scenarios. Bothworks require solving an NP-hard problem centrally.
These centralized throughput optimal algorithmssuffer from two main shortcomings. The first isthe high computational complexity, and the secondone is the cost associated with the collection ofnetwork state information at a central location. Thefirst problem has been countered in the literaturethrough lower complexity suboptimal algorithms.Maximal Scheduling is such an algorithm that re-
This is the author's version of an article that has been published in this journal. Changes were made to this version by the publisher prior to publication.The final version of record is available at http://dx.doi.org/10.1109/TMC.2014.2343613
Copyright (c) 2014 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing [email protected].

2
duces the time complexity of MWS at the expenseof achieving a small fraction of the capacity region[1]. Another algorithm, Greedy Maximal Schedul-ing (GMS), always selects a link with the longestqueue that does not cause interference to linksalready chosen. GMS is shown to be throughputoptimal if the network topology satisfies the local-pooling condition [2]. Nevertheless, only a fractionof the capacity region can be achieved for generaltopologies [9]. Furthermore, the distributed imple-mentation of GMS entails signaling overhead whichis not scalable [11].
Recently, a new class of distributed algorithmshas been proposed to achieve throughput optimalitywhile circumventing these problems. These newalgorithms are random access algorithms based onthe notion of channel sensing. These algorithms usequeue lengths to determine channel access proba-bilities, achieving the full capacity region in ad hocwireless networks in a distributed manner. In [8], anadaptive throughput optimal CSMA scheduling al-gorithm is proposed for a general interference modelin continuous time. It uses transmission aggres-siveness, which is a function of the queue length.Implementation considerations in 802.11 networksare discussed considering packet collisions. In [13],Q-CSMA, a discrete-time distributed randomizedalgorithm based on Glauber dynamics is proposed.In both [8] and [13], the queue length based CSMAalgorithms achieve the full capacity region in asingle-channel ad hoc wireless network.
The queue length-based CSMA algorithms of [8][13] assume that the channel is always available, acondition not satisfied in cognitive radio networks.With the randomness of the channel availability,state transitions are forced by the channel stategoing from ON to OFF. In this paper, we developCA-CSMA (Channel-aware CSMA/CA), a new dis-tributed throughput optimal scheduling algorithmfor CRNs. To this end, we introduce a new sys-tem state representation that includes channel stateinformation, and design our algorithms to achievethroughput optimality without causing interferencewith PUs. In this work, we focus on the algorithmdesign for single-channel cognitive radio networks.Our analysis can be immediately extended to asystem with orthogonal channels, where schedulingis performed per channel. However, extensions tonon-orthogonal channels are beyond the scope ofthis paper.
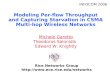
Fig. 1. A SU network composed of 7 SUs overlayed with a PUnetwork.
The paper is organized as follows: In Section II,the system model is introduced. In Section III, wediscuss some technical challenges that require anew state space representation and then describe theappropriate representation on which CA-CSMA isbuilt. Numerical performance evaluations are pre-sented in Section IV. The paper is concluded inSection V.
II. SYSTEM MODEL
We consider a cognitive radio network consistingof N SUs coexisting with a PU network (Figure 1),where the PU network is represented as a singlesource of emission and the SUs communicate withtheir neighbors directly. The PU network has a sin-gle designated channel to transmit on. We adopt theexclusive communication approach to interferenceavoidance, i.e., an SU can transmit only when thePU network does not use the channel. The set Sdenotes all SUs that are outside the interferencerange of the PU network while S is the set of allother SUs. i.e., SUs 1-3 are in S and SUs 4-7 arein S. SUs in S have access to the channel at anytime since its transmission does not interfere withthe PU network. SUs in S can sense the channeland keep silent when the PU network is active.
The neighboring SUs of a given SU i (i =1, · · · , N ) is denoted by C(i) such that i and anyof its neighbors j ∈ C(i) cannot transmit at thesame time. Note that both the k-hop (k ≥ 1)[9] and distance-based [5] interference models areincluded as special cases. Symmetry is assumed inthe conflict set, i.e., if i ∈ C(j), then j ∈ C(i).
We consider a time-slotted system with unit ca-pacity links. A feasible schedule includes SUs that
This is the author's version of an article that has been published in this journal. Changes were made to this version by the publisher prior to publication.The final version of record is available at http://dx.doi.org/10.1109/TMC.2014.2343613
Copyright (c) 2014 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing [email protected].

3
can be active at the same time subject to the conflictset constraints. Let M be the set of all feasibleschedules. A schedule is represented by a set x(x ∈ M ) and we denote the vector of scheduleby �x′ ∈ {0, 1}N such that x′
i = 1 if SU i is inthe schedule x. So i ∈ x indicates that x′
i = 1.The capacity region of the SUs, in the absence
of PU activity is defined as Λ = {�λ|�λ � �0 and
∃�μ ∈ Co(M), �λ ≺ �μ}, where Co(·) is the convexhull and �, ≺ are component-wise “greater than orequal to” and “smaller than” operators, respectively.The actual capacity region of SUs is the interior ofΛ subject to the PU activity.
In this work, single-hop flows for both the pri-mary and the secondary systems are considered. Weassume that the PU has i.i.d. Bernoulli traffic in eachtime slot, where the PU is idle (channel is available)with probability p. B(t) is defined as the channelstate at time t, where B(t) = 0 if the channel isavailable (PU is idle) and B(t) = 1 if the channelis unavailable (PU is active).
III. THE DISTRIBUTED SCHEDULING
ALGORITHM FOR CRNS
A. Q-CSMA Overview
As mentioned in the introduction, throughputoptimal CSMA-based distributed scheduling algo-rithms such as Q-CSMA [13] have been proposedin the recent past. It is tempting to apply suchalgorithms to achieve throughput optimality in adistributed manner although it does not considercognitive radio environments. In the following, wefirst present an overview of the Q-CSMA algorithm.We then demonstrate why Q-CSMA cannot be di-rectly applied to CRNs, which motivates our maincontributions in this work.
1) Introduction to Q-CSMA: In [13], a discrete-time distributed randomized algorithm is proposedto achieve the full capacity region in a single-channel network. The algorithm of [13] is based ona generalization of Glauber dynamics in statisticalphysics. In Glauber dynamics, only one link hasa state update within a time slot. In scheduling,a state update can be interpreted as a transitionof a link from “transmitting” to “idle” or from“idle” to “transmitting”. The incremental state up-date in every time slot leads to a scheduling policysufficiently close to MWS, which guarantees thethroughput optimality. In [13], multiple links are
allowed to update their states in a single time slot.This minor change, which results in improved delayperformance, does not affect throughput optimality.
A more detailed description of the Q-CSMAalgorithm is as follows: Each time slot t is dividedinto a control slot and a data slot, where the controlslot is much smaller than the data slot. In thecontrol slot, a collision-free transmission schedule isgenerated and used for data transmission in the dataslot. Let m(t) be a set of SUs that do not conflictwith each other and selected randomly in the controlslot (the scheme will be presented in Section III-B).M0 denotes the set of all m(t) which is all possibleschedules. So M0 includes all feasible schedules thatcould be generated by the randomized algorithm.Note that M0 ⊆ M , the set of all feasible schedules.The network randomly selects a feasible schedulem(t), which is called the decision schedule in [13].m(t) can be regarded as a candidate schedule. Notethat m(t) and m(t − 1) are independent for allt > 0 because m(t) is chosen independently inthe subsequent control slot [13]. Each link withinm(t) will be checked to decide whether it will beincluded in the transmission schedule x(t). Linki ∈ m(t) may be included in x(t) if ∀j ∈ C(i),j /∈ x(t − 1); otherwise, Link i is not includedin x(t). Furthermore, link k /∈ m(t) is included inx(t) if k ∈ x(t − 1). The detailed algorithm is asfollows: links in m(t) that had no neighbors activein the previous data slot are allowed to update theirstates with a certain probability which is a functionof their queue lengths; those outside the decisionschedule m(t) maintain their states. By explicitlytaking into account collisions in the control slot,the algorithm generates collision-free transmissionschedules x(t) for the data slot. More importantly,the Discrete Time Markov Chain (DTMC) withthe transmission schedule chosen as the state isshown to be time-reversible and has product-formstationary distribution, which are used to provethroughput optimality of this algorithm.
The operation of the Q-CSMA algorithm is il-lustrated in Figure 2 for a simple two-link topol-ogy, where the two links interfere with each other.State (0, 0) represents that neither link transmitsand state (0, 1) indicates that only link 2 transmits.αi is the probability that link i (i = 1, 2) ischosen in the decision schedule m(t) and pi is theprobability that link i is activated given it is inm(t) and no neighbors were active in the previous
This is the author's version of an article that has been published in this journal. Changes were made to this version by the publisher prior to publication.The final version of record is available at http://dx.doi.org/10.1109/TMC.2014.2343613
Copyright (c) 2014 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing [email protected].

4
Fig. 2. DTMC with the vector of transmission schedule �x′(t) oftwo links as the state. Two links interfere with each other.
(0,0,0)
(1,0,0)
(0,0,1)
(1,0,1)
p(α3(1-p3)+α4(1-p1)(1-p3))+1-p
p(α3(1-p3)+α4p1(1-p3)p(α1p1+α4p1(1-p3))
p(α3p3+α4p1p3)
p(α1p1+α4p1p3)
p(α1(1-p1)+α4(1-p1)p3)p(α3p3+α4(1-p1)p3)
p(α1(1-p1)+α4(1-p1)(1-p3))+1-p
pα4 p
1 (1-p3 )
pα4 (1-p
1 )p3
(0,1,0)
pα4(1-p1)(1-p3)+1-p
pα4p1p3
pα2(1-p2)+1-p
pα2p2
Fig. 3. DTMC with the vector of transmission schedule �x′(t) ofthree SU links as the state in CRNs. 1 and 2 interfere with each other.2 and 3 interfere with each other. 1 and 3 can transmit simultaneously.
data slot. The DTMC is time reversible and hasthe following product-form stationary distribution:π(0, 0) = 1
Z, π(0, 1) = 1
Zp2
1−p2, π(1, 0) = 1
Zp1
1−p1where Z = 1 + p1
1−p1+ p2
1−p2and π(a, b) is the
stationary distribution for state (a, b) (a, b = 0, 1),which are in accordance with Proposition 1 of [13].
2) Drawback of Q-CSMA in CRNs: We nextillustrate why x(t) is a poor choice for representingthe state in CRNs, and leads to a non-reversibleDTMC. For clarity, we use �x′(t), the vector oftransmission schedule as defined in Section II, asthe state. Consider a simple example in Figure 3 forthree interfering SU links, where 1 interferes with 2,2 interferes with 3 and 1 does not interfere with 3.All SU links are within the interference range of thePU. Similar to the earlier example, 1 (0) indicatesthat an SU link is (not) transmitting. For instance,state (1, 0, 1) means that SU links 1 and 3 aretransmitting and SU link 2 is not transmitting. Notethat (0, 0, 0) includes two cases: 1) The channel isavailable and no SU link is transmitting; 2) Thechannel is unavailable. Let αi be the probability that
(0,1;0)
(0,0;0)
(0,0;1)
(1,0;0)
pα2p2
pα1(1-p1)pα2(1-p2)
pα1p1
pα1p1
1-p1-p
pα2p2
P(α1 (1-p
1 )+α2 (1-p
2 )+α0 )
1-p
Fig. 4. DTMC with both the vector of transmission schedule �x′(t)of two SUs and channel state as the state. Two SUs are in the conflictset of each other.
SU link i is chosen in the decision schedule m(t)(i = 1, 2, 3), α4 the probability that both 1 and 3 arechosen in m(t), and pi the probability that SU linki is activated (i = 1, 2, 3) given it is in m(t) and noneighbors were active in the previous data slot. Nowwe examine the transitions from (0, 0, 0), (1, 0, 0)to (1, 0, 1) clockwise and counter-clockwise. Thesetwo probabilities are not equal so the DTMC is nottime reversible by Kolmogorov’s criterion [10].
To treat the “available” and “unavailable” channelseparately, we incorporate the channel state into thestate space design. The new DTMC is illustratedin Figure 4 where we consider two SUs interferingwith each other and both are in the interferencerange of the PU. The new system state is defined asX ′ = (�x′;B) where �x′ is the vector of transmissionschedule and B is the channel state defined inSection II (0 represents that the channel is idle; 1represents that the channel is busy). For instance,(0, 0; 1) indicates that the channel is unavailable andneither SU is transmitting; (0, 1; 0) means the chan-nel is available and SU 2 is transmitting. Note thatα1 and α2 have the same definitions as before; α0
is the probability that neither SU is selected in thedecision schedule (α0+α1+α2 = 1). We now checkto see whether the DTMC is time reversible byexamining the transitions from (0, 0; 1), (0, 0; 0) to(0, 1; 0) clockwise and counter-clockwise. The prod-uct of clockwise transition probabilities is p2(1 −p)p2α2(α1(1 − p1) + α2(1 − p2) + α0) and theproduct of counter-clockwise transition probabilities
This is the author's version of an article that has been published in this journal. Changes were made to this version by the publisher prior to publication.The final version of record is available at http://dx.doi.org/10.1109/TMC.2014.2343613
Copyright (c) 2014 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing [email protected].

5
is p2(1−p)α22p2(1−p2). These two are not equal so
the DTMC is not time reversible by Kolmogorov’scriterion [10].
3) The Necessity of New Channel States inDTMC: To solve this problem, we want the states toevolve in different dimensions when channel stateis different. For example, when the channel statechanges, one chain stops evolving while the otherstarts evolving. More specifically, to generate a timereversible DTMC with a product form stationarydistribution for a general topology where there areSUs in S (outside the interference range of the PUnetwork), we introduce two Markov chains withnew state definitions. We define1
�y′a(t) = {�x′(τ) : the largest τ ≤ t with B(τ) = 0}
�y′b(t) = {�x′(τ) : the largest τ ≤ t with B(τ) = 1}
Note that �y′a
is the vector of transmission sched-ule in the most recent data slot (including time
t) when the channel is ON; �y′b
is the vector oftransmission schedule in the most recent data slot(including time t) when the channel is OFF. We alsodenote the corresponding transmission schedules byya and yb, respectively: i ∈ ya if and only if y′ai = 1and i ∈ yb if and only if y′bi = 1. We then define
ya = (�y′a(t);B(t)), yb = (�y′
b(t);B(t)) as the states
for the two chains, respectively. For instance, inFigure 5, two SUs are in the conflict set of eachother with SU 1 in S and SU 2 in S: (0, 1; 0)indicates that the channel is available and only SUlink 2 is transmitting; (1, 0; 1) means that the chan-nel is unavailable and in the most recent availablechannel state, only SU link 1 is transmitting. Thetransitions in Figure 5 follows exactly from CA-CSMA described later in Section III-B. It is obviousthat the transition to the next state depends only onthe current state and the current input including thechannel state B and the decision schedule. Henceboth chains are Markovian. It is easy to verify, asin Figure 4, that Markov chains with ya, yb as the
1We assume t starts from −∞ to make �y′a, �y′b well-defined,
especially for �y′a(t) when B(0) = · · · = B(t) = 1 and �y′b(t)when B(0) = · · · = B(t) = 0, respectively.
Fig. 5. Two DTMC evolutions for SUs inside and outside theinterference range of the PU. Two SUs are in the conflict set ofeach other. Both DTMCs are time reversible and have product-form stationary distribution (by Propositions 3.2 and 3.4). αa
2 isthe probability SU 2 is chosen the decision schedule ma when thechannel is available. αb
2 is the probability SU 2 is chosen in thedecision schedule mb when the channel is unavailable. Note that|ma| = 2 and |mb| = 1 in this example. The first DTMC transitionsto another state only when the channel is ON while the second DTMCtransitions to another state only when the channel is OFF.
states are not time reversible.2
We further define an aggregate state for eachDTMC, which includes only �y(t).
DTMC Y a : ya = (�y′a(t))
DTMC Y b : yb = (�y′b(t))
Note that in Figure 5, the rectangles in the firstchain correspond to ya and those in the second chaincorrespond to yb. In DTMC Y a, the transition tothe next state ¯ya depends only on the current stateya and the current input including the channel stateB and the decision schedule. Thus DTMC Y a isMarkovian. Similar arguments can be applied toDTMC Y b. In Section III-B, both DTMCs will be
2Note that we also use Figure 5 to illustrate the Markov chains withthe aggregate states ya and yb later. The transitioning probabilitiesfor each single state are not labeled in Figure 5. By CA-CSMA, it iseasy to find that the outgoing probabilities from (�y′a; 0) and (�y′a; 1)
to (�y′
a
; 0) are the same. The incoming probabilities from (�y′
a
;B(t))
to (�y′a; 1) do not exist if�y′
a
�= �y′a.
This is the author's version of an article that has been published in this journal. Changes were made to this version by the publisher prior to publication.The final version of record is available at http://dx.doi.org/10.1109/TMC.2014.2343613
Copyright (c) 2014 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing [email protected].

6
shown to be time reversible with a product formstationary distribution.
B. CA-CSMA: Scheduling Algorithm for SingleChannel CRNs
Our new algorithm is based on the redefinitionof the system state of Section III-A along with thedifferentiated treatment of SUs inside and outsidethe PU interference range. Each SU i keeps a queuedenoted by qi. The transmission schedule for qi isdenoted by x′
i. We define Ai(t) as the arrivals to SUi at time slot t, i = 1, · · · , N and we assume it tobe bounded. We assume arrivals are i.i.d. over timeand independent between users. λn is defined to beE(An(t)). The evolution of the queue length is thenwritten as:
qi(t+1) = (qi(t) + Ai(t)− zi(t))+
, for i = 1, · · · , N ,
where zi(t) = (1 − B(t))y′ai + B(t)y′bi(t). Note
that �z(t) only depends on B(t), �y′a
and �y′b. Since
we have shown that �y′a
and �y′b
are Markovianin Section III-A, the queue lengths at SUs evolveas a Markov Chain with the transitions caused byarrivals, departures and channel state in the currenttime slot. In Proposition 3.6, we will show that thisMarkov Chain is positive recurrent for any arrivalrate vector within the actual capacity region (alsocalled throughput optimal) under CA-CSMA.
1) Description of CA-CSMA: The decisionschedule for all SUs is denoted by ma(t). Thedecision schedule for SUs in S, denoted by mb(t),does not consider the interference to or from SUsin S. The set of all ma(t) and mb(t) are denoted byMa
0 and M b0 , respectively. We define αa(ma(t)) and
αb(mb(t)) as the probability that ma(t) is chosen inthe control slot when the channel is available, andthe probability that mb(t) is chosen in the controlslot when the channel is unavailable, respectively.For clarification, “available” means the PU is idleand “unavailable” means the PU is active althoughSUs in S cannot sense it. Recall that S is the setof all SUs that are outside the interference range ofthe PU network.
We first develop CA-CSMA that characterizesthe different behaviors of SUs in S and S underdifferent channel states. Algorithm 1 summarizesthe proposed CA-CSMA. SUs in S acquire chan-nel state information in every time slot by locally
Algorithm 1 CA-CSMA1: if channel is available /*B(t) = 0*/ then2: 1. In the control slot, randomly select a deci-
sion schedule ma(t) ∈ Ma0 with probability
αa(ma(t))3: if i ∈ ma(t) and y′aj (t − 1) = 0 for all j ∈
C(i) then4: (a) x′
i(t) = 1 with probability pi5: (b) x′
i(t) = 0 with probability pi6: else if i ∈ ma(t) and y′aj (t−1) = 1 for some
j ∈ C(i) then7: x′
i(t) = 08: else9: x′
i(t) = y′ai (t− 1) /*i /∈ ma(t)*/10: end if11: 2. In the data slot, use �x′(t) as the transmis-
sion schedule12: else13: Execute Lines 2-11 by replacing all a with b14: end if
sensing the channel while SUs in S are notifiedby SUs in S for the new channel state. Next weelaborate on the behaviors of the SUs on the channelstate transitions. When the channel state is available,all SUs treat the most recently available slot astheir previous slot ignoring the unavailable period,and schedule packets in a way similar to Q-CSMA(Lines 2-11) where pi = 1 − pi [13]. When thechannel state is unavailable, SU i in S remains silentand SUs in S treat the most recently unavailable slotas their previous slot ignoring the available period,and schedule packets in a way similar to Q-CSMA(Lines 13-22) [13]. In other words, SUs in S eitherretrieve or record information on the activities ofSUs in C(i) when channel state changes while SUsin S have to record and retrieve on the channel statechange.
To understand CA-CSMA better, we consider theillustrative example (Figure 5) with SU 1 insidethe interference range of the PU (1 ∈ S) andSU 2 (2 ∈ S) outside. (0, 1; 0) indicates that thechannel is available and only SU 2 is transmitting;(1, 0; 1) means the channel is unavailable and inthe most recent available channel state, only SU1 is transmitting. (0; 1) indicates that the channelis unavailable and SU 2 is not transmitting; (1; 0)means the channel is available and in the mostrecent unavailable channel state, SU 2 is transmit-
This is the author's version of an article that has been published in this journal. Changes were made to this version by the publisher prior to publication.The final version of record is available at http://dx.doi.org/10.1109/TMC.2014.2343613
Copyright (c) 2014 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing [email protected].

7
ting. When the channel is available, the first chainin Figure 5 transitions to the next state thoughthe second chain only stays in the previous state(Lines 2-11 in CA-CSMA); when the channel isunavailable, the second chain transitions to the nextstate while first chain only stays in the previous state(Lines 13-22).
Lines 2 and 13 in CA-CSMA can be implementedin a distributed manner through contention similarto [13] - the information exchange is kept locally.At time slot t: 1) SU i selects a random numberTi uniformly in [0,W − 1] and waits for Ti controlmini-slots; 2) If SU i hears an INTENT messagefrom a SU in C(i) before the (Ti + 1)-th controlmini-slot, i will not be included in ma(t) or mb(t)and will give up the transmission of the INTENTmessage in this control slot; 3) If SU i does nothear an INTENT message from any SU in C(i)before the (Ti + 1)-th control mini-slot, it willbroadcast an INTENT message at the beginningof the (Ti + 1)-th control mini-slot. If there is nocollision, SU i will be included in ma(t) or mb(t);or else, no SU is included. Note that we only needto send SU ID in the INTENT message. So evenif the message is encoded with low transmissiondata rate at the physical layer, this overhead isinsignificant. The other overhead of the algorithmincludes notifications of channel state changes forSUs in S that could be done by SUs in S. In thisscheme, a control channel with limited bandwidthis used. On channel state change, each SU in Ssends the notification to all its neighbors. SUs inS will silenty drop the message since they havealready sensed the channel state change. Each SUin S forwards it to all its neighbors if a notificationhas not been received in this time slot. This schemeguarantees all SUs in S notified without infiniteloops.
2) Proof of Optimality: In the following, we willformally show that CA-CSMA achieves throughputoptimality. The transition probabilities are presentedin Lemmas 3.1 and 3.3. Propositions 3.2 and 3.4give the product-form of the stationary distribution.Proposition 3.6 claims the throughput optimality ofCA-CSMA. We define π(v) := prob(state is v).
Lemma 3.1: (a) A state ya = (�y′a(t)) can make
a transition to a state ¯ya = (�y′
a
(t)) (�y′a = �
y′a
) iff
ya ∪ ya ∈ Ma0
and there exists a decision schedule ma ∈ Ma0 s.t.
ya�ya := (ya \ ya) ∪ (ya \ ya) ⊆ ma.
(b) The transition probability P (ya, ¯ya) from ya
to ¯ya (= ya).
P (ya, ¯ya)
=∑
ma∈Ma0 :y
a�ya⊆ma
pαa(ma)
( ∏l∈ya\ya
pl
)( ∏
k∈ya\yapk
)( ∏i∈ma∩(ya∩ya)
pi
)( ∏
j∈ma\(ya∪ya)\C(ya∪ya)pj
), (1)
where C(ya∪ ya) denotes the neighbors of nodes inya ∪ ya.
Proof: Part (a) can be proven as Lemma 2 in
[13]. To prove Part (b), we denote P sch(�y′a,�y′
a
) as
P (�y′, �y′) in Lemma 2 of [13] which is the transition
probability from state �y′ to state�y′ with the always-
available channel. We only need to show
P ((�y′a; 0),
�y′
a
) = P ((�y′a; 1),
�y′
a
) = pP sch(�y′a,�y′
a
).
The first equality is obvious by CA-CSMA.
P ((�y′a; 0),
�y′
a
)
= P ((�y′a; 0), (
�y′
a
; 0)) + P ((�y′a; 0), (
�y′
a
; 1))
= pP sch(�y′a,�y′
a
) + 0;
P ((�y′a; 1),
�y′
a
)
= P ((�y′a; 1), (
�y′
a
; 0)) + P ((�y′a; 1), (
�y′
a
; 1))
= pP sch(�y′a,�y′
a
) + 0.
By Lemma 2 in [13] which states the transitionprobability with the always-available channel, wecan prove Part (b).
Based on the state transition probabilities, weshow that DTMCa has product-form stationarydistributions and give the specific forms in Proposi-tion 3.2. Since we have divided the state transitionsin different channel states into two chains, either oneof them can be treated as channel state unchanged,
This is the author's version of an article that has been published in this journal. Changes were made to this version by the publisher prior to publication.The final version of record is available at http://dx.doi.org/10.1109/TMC.2014.2343613
Copyright (c) 2014 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing [email protected].

8
which simplifies our proof and leads to a cleanresult.
Proposition 3.2: A necessary and sufficient con-dition for the DTMCa to be irreducible and ape-riodic is ∪ma∈Ma
0ma = {1, · · · , N} and in this
case the DTMC is reversible and has the follow-ing product-form stationary distribution: π(Y a) =1Za
∏i∈ya
pipi
, Za =∑
ya∈Ma0
∏i∈ya
pipi
.
Proof: The necessary and sufficient conditioncan be proven as in the proof of Proposition 1 in [13]which states the product-form stationary distributionof the DTMC with the transmission schedule asthe network state in an alway-available channelnetwork. We only need to check π(ya)P (ya, ¯ya) =π(¯ya)P (¯ya, ya). It follows that the DTMC is re-versible and has such stationary distribution.
In a similar way, we show that DTMCb hasproduct-form stationary distributions in Proposi-tion 3.4 based on Lemma 3.3.
Lemma 3.3: (a) A state yb = (�y′b(t)) can make a
transition to a state ¯yb = (�y′
b
(t)) (�y′b = �
y′b
) iff
yb ∪ yb ∈ M b0
and there exists a decision schedule mb ∈ M b0 s.t.
yb�yb := (yb \ yb) ∪ (yb \ yb) ⊆ mb.
(b) The transition probability P (yb, ¯yb) from yb
to ¯yb (= yb).
P (yb, ¯yb)
=∑
mb∈Mb0 :y
b�yb⊆mb
(1− p)αb(mb)
( ∏l∈yb\yb
pl
)( ∏
k∈yb\ybpk
)( ∏i∈mb∩(yb∩yb)
pi
)( ∏
j∈mb\(yb∪yb)\C(yb∪yb)pj
),
where C(yb∪ yb) denotes the neighbors of nodes inyb ∪ yb.
Proof: Part (a) can be proven as Lemma 2 in
[13]. To prove Part (b), we denote P sch(�y′b,�y′
b
) as
P (�y′, �y′b
) in Lemma 2 of [13] which is the transition
probability from state �y′ to state�y′ with the always-
available channel. We only need to show
P ((�y′b; 0),
�y′
b
) = P ((�y′b; 1),
�y′
b
)
= (1− p)P sch(�y′b,�y′
b
).
The rest of the proof is similar to that of Lemma 3.1.
Proposition 3.4: A necessary and sufficient con-dition for the DTMCb to be irreducible and ape-riodic is ∪mb∈Mb
0mb = S and in this case the
DTMC is reversible and has the following product-form stationary distribution: π(yb) = 1
Zb
∏i∈yb
pipi
,
Zb =∑
yb∈Mb0
∏i∈yb
pipi
.
Proof: It is similar to the proof ofProposition 3.2 except that we need to checkπ(yb)P (yb, ¯yb) = π(¯yb)P (¯yb, yb).
Based on the product-form distribution, we usethe following results established in [12] to provethroughput-optimality of Algorithm 1.
Theorem 3.5: [12]3 We define w∗(t) :=max
x∈M(t)
∑i∈x
wi(t) where M(t) is the set of all
feasible schedules at time t. For a schedulingalgorithm, if given any ε and δ, 0 < ε, δ < 1,there exists a β > 0 such that: if w∗(t) > β,the scheduling algorithm chooses a schedulex(t) ∈ M(t) that satisfies
P{∑i∈x(t)
wi(t) ≥ (1− ε)w∗(t)} ≥ 1− δ, (2)
where wi(t) = fi(qi(t)) is a function of queuelengths satisfying the following conditions:
1) fi(qi(t)) is a nondecreasing, continuous func-tion with lim
qi→∞fi(qi) = ∞;
2) Given any a ∈ R, limqi→∞fi(qi+a)fi(qi)
= 1.
Then the scheduling algorithm is throughput opti-mal.
Remark: The throughput optimality result in The-orem 3.5 holds for any scheduler as long as theconditions are satisfied. It does not depend on howthe scheduling algorithm is designed.
3The proof of the theorem in [12] can be easily extended togeneral conflict graph, and is applicable to our cognitive radio model.However, the authors in [12] can only find a scheduling algorithm thatsatisfies (2) in the fully-connected conflict graph while we proposea scheduling algorithm satisfying (2) for the general conflict graphunder the cognitive radio framework.
This is the author's version of an article that has been published in this journal. Changes were made to this version by the publisher prior to publication.The final version of record is available at http://dx.doi.org/10.1109/TMC.2014.2343613
Copyright (c) 2014 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing [email protected].

9
Then the scheduling algorithm is throughput-optimal.
We choose pi = ewi(t)
ewi(t)+1as long as wi satisfies
the conditions in [3]. By choosing fi wisely, wi(t)evolves slowly over t. For instance, we choosefi(qi) = log (log (qi + e)) in Section IV. We assumethat the DTMC is in steady-state in every timeslot throughout this paper (time-scale separation)[8][13]. In the following, we want to show thatCA-CSMA is throughput-optimal by showing thatit is “close” enough to another throughput-optimalscheduling algorithm - MWS. According to our de-sign of two DTMCs, we analyze this “closeness” indifferent channel states separately, which is differentfrom [13].
Proposition 3.6: Suppose ∪ma∈Ma0m =
{1, · · · , N} and ∪mb∈Mb0mb = S. Let pi =
ewi(t)
ewi(t)+1,
∀i ∈ {1, · · · , N} when B(t) = 0 and pi =ewi(t)
ewi(t)+1,
∀i ∈ S when B(t) = 1, where wi(t) = fi(qi(t)) isa function of queue length satisfying the conditionsestablished in Theorem 3.5. Then CA-CSMA isthroughput-optimal.
Proof: By Propositions 3.2 and 3.4, we knowthat both DTMCs have product-form stationary dis-tributions. Given any ε and δ s.t. 0 < ε, δ < 1. ForDTMCa, we define wa(t) = max
x∈Ma0
∑i∈x
wi(t). Based
on this, four sets of states are defined as follows:
χa0 := {(�y′a; 0)| ya ∈ Ma
0 ,∑i∈ya
wi(t) < (1−ε)wa(t)}
χa1 := {(�y′a; 1)| ya ∈ Ma
0 ,∑i∈ya
wi(t) < (1−ε)wa(t)}
ϕa := χa0 ∪ χa
1
ψa := {Y a = (�y′a)| ya ∈ Ma
0 ,∑i∈ya
wi(t) < (1− ε)wa(t), }
where χa0 includes all states with the channel avail-
able and the sum of wi(t) from SUs chosen in theschedule is at least a fraction of ε away from wa(t),χa1 includes all states with the channel unavailable
and the sum of wi(t) from SUs chosen in theschedule of the most recently available slot is atleast a fraction of ε away from wa(t). Note that
if (�y′a;B) ∈ ϕa, then ya = (�y′
a) ∈ ψa. We then
calculate the probability of a state in set χa0. We
define π(A) := prob (state v ∈ A).
π(χa0) < π(ϕa) = π(ψa)
=∑
�y′a∈ψa
π(Y a) =∑
�y′a∈ψa
e
∑
i∈yawi(t)
Za
≤ |ψa|e(1−ε)wa(t)
Za<
2N
eεwa(t)
where
Za =∑
ya∈Ma0
e
∑
i∈yawi(t)
> emax
ya∈Ma0
∑
i∈yawi(t)
= ewa(t).
The first equality holds because 1{(�y′a;0)}∪{(�y′a;1)} =1{(�y′a)}; The last inequality is true because |ψa| ≤|Ma
0 | ≤ 2N . Thus, ∃βa > 0, such that: wa(t) > βa
implies π(χa0) < δmin (p, 1− p).
For DTMCb, we define wb(t) = maxx∈Mb
0
∑i∈x
wi(t).
Similar to DTMCa, four sets of states are defined.
χb0 := {(�y′b; 0)| yb ∈ M b
0 ,∑i∈yb
wi(t) < (1− ε)wb(t)}
χb1 := {(�y′b; 1)| yb ∈ M b
0 ,∑i∈yb
wi(t) < (1− ε)wb(t)}
ϕb := χb0 ∪ χb
1
ψb := {Y b = (�y′b)| yb ∈ M b
0 ,∑i∈yb
wi(t) < (1− ε)wb(t)}
We then calculate the probability of a state in setχb1.
π(χb1) < π(ϕb) = π(ψb)
=∑�y′
b∈ψb
π(yb) =∑�y′
b∈ψb
e
∑
i∈ybwi(t)
Zb
≤ |ψb|e(1−ε)wb(t)
Zb<
2|S|
eεwb(t)
This is the author's version of an article that has been published in this journal. Changes were made to this version by the publisher prior to publication.The final version of record is available at http://dx.doi.org/10.1109/TMC.2014.2343613
Copyright (c) 2014 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing [email protected].

10
where
Zb =∑
yb∈Mb0
e
∑
i∈yb
wi(t)
> emax
yb∈Mb0
∑
i∈ybwi(t)
= ewb(t).
The first equality holds because 1{(�y′b;0)}∪{(�y′b;1)} =
1{(�y′b)}; The last inequality is true because |ψb| ≤|M b
0 | ≤ 2|S|. Thus, ∃βb > 0, such that: wb(t) > βb,which implies that π(χb
1) < δmin (p, 1− p).
Since w∗(t) = wa(t) when B(t) = 0, w∗(t) =wb(t) when B(t) = 1, we have the following results:
P{∑
i∈ya(t)wi(t) ≥ (1− ε)w∗(t)|B(t) = 0}
= P{∑
i∈ya(t)wi(t) ≥ (1− ε)wa(t)|B(t) = 0}
= 1− P{∑
i∈ya(t)wi(t) < (1− ε)wa(t)|B(t) = 0}
= 1− π(χa0)
p> 1− δmin (p, 1− p)/p
≥ 1− δ (3)
when wa(t) > βa. Equation (3) implies that: IfB(t) = 0, P{ ∑
i∈ya(t)wi(t) ≥ (1 − ε)w∗(t)} > 1 − δ
if wa(t) > β. Similarly,
P{∑
i∈yb(t)wi(t) ≥ (1− ε)w∗(t)|B(t) = 1}
= P{∑
i∈yb(t)wi(t) ≥ (1− ε)wb(t)|B(t) = 1}
= 1− P{∑
i∈ya(t)wi(t) < (1− ε)wa(t)|B(t) = 1}
= 1− π(χb1)
1− p> 1− δmin (p, 1− p)/(1− p)
≥ 1− δ (4)
when wb(t) > βb. Equation (4) implies that: IfB(t) = 1, P{ ∑
i∈yb(t)wi(t) ≥ (1 − ε)w∗(t)} > 1 − δ
when wb(t) > β.
We use the total probability formula to calculatethe unconditional probability:
P{∑i∈x(t)
wi(t) ≥ (1− ε)w∗(t)}
(a)= P{
∑i∈ya(t)
wi(t) ≥ (1− ε)w∗(t)|B(t) = 0}
P (B(t) = 0)
+ P{∑
i∈yb(t)wi(t) ≥ (1− ε)w∗(t)|B(t) = 1}
P (B(t) = 1)(b)
≥ (1− δ)p+ (1− δ)(1− p) = 1− δ
if w∗(t) > β where β = max (βa, βb). Note that(a) holds because ya(t) = x(t) when B(t) = 0 andyb(t) = x(t) when B(t) = 1 by definition, and (b)holds due to Equations (3) and (4). Hence Algo-rithm 1 satisfies the condition of Theorem 3.5 andis throughput optimal. Although the scheduler inCA-CSMA involves the evolutions of two Markovchains where a combination of the transmissionschedule and the channel state is the system state,it is throughput optimal as long as it is Markovianand the conditions in Theorem 3.5 are satisfied.
Proposition 3.6 shows that the full capacity regioncan be achieved by CA-CSMA in CRNs with SUsinside and outside the interference range of the PU.Similar to Lemma 3 in [13], we can prove that bothma(t) and mb(t) produced by this distributed im-plementation are feasible schedules and they satisfythe conditions in Proposition 3.6.
IV. SIMULATIONS
In this section, we conduct simulations to com-pare the performance of 802.11 (we use a similaralgorithm as in [13]), MWS, Q-CSMA and CA-CSMA. Since the 802.11 algorithm we comparedoes not follow the exact designs of contentionwindow sizes, sensing slots, transmission slots, etc,we call it “simple 802.11” in all the figures. In Q-CSMA, if a link is activated but the channel isoff for it, it will keep silent. In CA-CSMA, W ,the contention window size in the control slot, ischosen to be the number of SUs in the network. SUweights are chosen to be of the form log(log(q+e)),where q is the queue length [13] [14] [4]. We setp = 0.6, that is, 60% of the time, the PU is notusing the channel. Note that in all the performance
This is the author's version of an article that has been published in this journal. Changes were made to this version by the publisher prior to publication.The final version of record is available at http://dx.doi.org/10.1109/TMC.2014.2343613
Copyright (c) 2014 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing [email protected].

11
Fig. 6. Conflict graph with 6 SUs.
0 0.2 0.4 0.60
2000
4000
6000
8000
100006 SUs (conf graph)
ρ
aver
age
queu
e le
ngth
of
all S
Us
simple 802.11CA−CSMAMWSQ−CSMA
Fig. 7. Queue lengths of four algorithms with different loads in the6-SU network.
evaluations, we do not take into account the controlslot overhead since it is a fixed and small portion ofthe whole time slot. Discounted by this fixed factor,the performance of CA-CSMA is still promising aswe will observe in the following evaluations.
0 0.1 0.2 0.30
500
1000
1500
20006 SUs (conf graph)
ρ
aver
age
queu
e le
ngth
of
all S
Us
simple 802.11Q−CSMA
Fig. 8. Queue lengths of simple 802.11 and Q-CSMA with lowloads in the 6-SU network.
0 0.2 0.4 0.52 0.60
500
1000
15006 SUs (conf graph)
ρ
aver
age
queu
e le
ngth
of
all S
Us
CA−CSMAMWS
Fig. 9. Queue lengths of CA-CSMA and MWS with a wide loadrange in the 6-SU network.
A. Performance Evaluation in the 6-SU Network
In “Network 1”, there are 6 SUs whose conflictgraph is shown in Figure 6. A conflict graph isone where two SUs are neighbors if they cannottransmit simultaneously. SUs 3 and 6 are outside theinterference range of the PU and others are inside.Let λ = 0.2×(1, 0, 1, 0, 0, 0)+0.3×(1, 0, 0, 1, 0, 1)+0.2 × (0, 1, 0, 0, 1, 0) + 0.3 × (0, 0, 1, 0, 1, 0) =(0.5, 0.2, 0.5, 0.3, 0.5, 0.3), which is a convex com-bination of some maximal independent sets. Wevary ρ from 0 to 0.9 × p so that ρ × λ lies insidethe capacity region. For each algorithm, for a fixedρ, we run 10 independent experiments and takethe average. We show the average queue length ofthe network over ρ in Figure 7 where the runningtime is 105 time slots. As we can see, CA-CSMAoutperforms simple 802.11, which does not takeinto account the queue length information, and Q-CSMA, which ignores channel state information.We plot Figure 8 to further show the rate regionsof simple 802.11 and Q-CSMA. The blow up pointis observed to be at around ρ = 0.3. Accordingly,we believe the improvement of CA-CSMA comesfrom Markov chain separation instead of pure queuelength based algorithm. In addition, CA-CSMAperforms almost as well as MWS. Figure 9 extendsρ to 0.58, which pushes the load almost to thecapacity region given that p = 0.6, to show thefull performances of CA-CSMA and MWS. MWSis slightly slower than CA-CSMA in terms of queuelength growth over a wide range of traffic load. Therapid increase of queue lengths of both algorithmsoccurs at around ρ = 0.52. In [13], a hybrid
This is the author's version of an article that has been published in this journal. Changes were made to this version by the publisher prior to publication.The final version of record is available at http://dx.doi.org/10.1109/TMC.2014.2343613
Copyright (c) 2014 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing [email protected].

12
1 2 3 4 5 60
2
4
6
8
10x 10
4
SU index
Tim
e sl
ots
Time for each SU to be saturated in the 6 SU network
simple 802.11CA−CSMA
Fig. 10. Time for each SU to saturate in the 6-SU network.
0 0.2 0.4 0.6 0.8 11.3
1.31
1.32
1.33
1.34
1.35
1.36
1.37
Prob. of false notification
Net
wo
rk t
hro
ug
hp
ut
(pac
kets
/slo
t)
Fig. 11. Network throughput over the probability of false notificationof channel state in the 6-SU network.
algorithm is developed to reduce the delay whilemaintaining the property of throughput optimality.A hybrid algorithm based on CA-CSMA can besimilarly designed to further improve the delayperformance, which is not the focus of this paper.
To see how long it takes the algorithms to saturatethe network, we define a queue length threshold,above which the SU is saturated. This thresholdis set to be 500/6
.= 83 in the 6-SU network.
Note that 500 is the average number of packetsin the network reached by CA-CSMA as shownin Figure 7. We plot the time for queue length ofeach SU to reach this threshold using both simple802.11 and CA-CSMA in Figure 10. The simulationtime is 105 times slot. If the queue length does notreach 83 packets within the simulation time, we setthe saturation time to be 105. The saturation timesat SUs under CA-CSMA are much more balancedthan in simple 802.11, which may also explain whyCA-CSMA stabilizes the system with arrivals thatsimple 802.11 cannot.
0 0.1 0.2 0.3 0.4 0.540
1000
2000
3000
4000
5000
60006 SUs (conf graph)
ρ
aver
age
queu
e le
ngth
of
all S
Us
CA−CSMAQ−CSMA
Fig. 12. Queue lengths of CA-CSMA and Q-CSMA with slowlyvarying channel state.
In CA-CSMA, channel state changes need to benotified to the SUs outside the interference rangeof the PU, which is an extra overhead and maycause errors as well. In Figure 11, we show therobustness of the network throughput to notificationerrors. We assume that the wrong notification in theprevious slot will be corrected in the current slot,which means, SUs outside the interference range ofthe PU would know they got the wrong notificationin the previous slot. This assumption allows thedesign of an efficient correction algorithm on thenotification errors, which is also our future work.The network throughput degrades gracefully whenthe error increases in Figure 11.
We also evaluate the performances of CA-CSMAand Q-CSMA in a more practical setting - lowerchannel variation, i.e., a common scenario of cog-nitive radio on TV band. In the first time slot,the channel state is available with probability of p.We then force the channel state to be unchangedfor the next 9 time slots. This process is repeatedwith a period of 10 time slots. We observe thatCA-CSMA still outperforms Q-CSMA although thequeue length of the latter grows more slowly than inFigure 7. The performance gain is believed to comefrom the slower channel state change. The positiveresults of CA-CSMA leads us to our future workon proving its throughput-optimality without i.i.d.assumption in PU activity.
B. Performance Evaluation in the 16-SU NetworkThere are 16 SUs in “Network 2”, where the
conflict graph is a 4 by 4 grid (Figure 13). Note that
This is the author's version of an article that has been published in this journal. Changes were made to this version by the publisher prior to publication.The final version of record is available at http://dx.doi.org/10.1109/TMC.2014.2343613
Copyright (c) 2014 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing [email protected].

13
1 2 3 4
5 6 7 8
9 10 11 12
13 14 15 16
Fig. 13. Conflict graph with 16 SUs.
0 0.05 0.1 0.15 0.2 0.2554
55
56
57
58
59
60
ρ
Ch
ann
el U
sag
e P
erce
nta
ge
(%)
Channel Usage Percentage over load factor in the grid network
simple 802.11CA−CSMAMWSQ−CSMA
Fig. 14. Channel usage percentage over load factor in the 4 by 4grid network.
the sizes we choose in the simulations are compa-rable to those in [13] and [8]. SUs 1 through 11 arewithin the interference range of the PU, while SUs12 to 16 are not. We compare metrics specific incognitive radio networks for simple 802.11, MWS,Q-CSMA and CA-CSMA in “Network 2”. First,we define channel usage as the percentage that anyof the SUs in the interference range of the PU isusing the channel. In Figure 14, we vary the loadfactors from 0 to close to capacity region boundaryand compare the channel usage percentages. Allalgorithms fluctuate but there are no significantdrops or jumps. Both MWS and CA-CSMA utilizethe available channel bandwidth efficiently whileQ-CSMA and simple 802.11 show worse channelusage.
We compare channel usage over different PUtraffic loads in Figure 15 where the SU traffic loadis 90% of the capacity region (in the comparisonsof all the following metrics, we use the same loadfactor if not specifically mentioned). Similarly, CA-CSMA and MWS utilize the channel bandwidth
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.90
20
40
60
80
100
Prob. that PU is not using the channel
Cha
nnel
Usa
ge P
erce
ntag
e (%
)
Channel Usage Percentage over PU traffic load in the grid network
simple 802.11CA−CSMAMWSQ−CSMA
Fig. 15. Channel usage percentage over PU traffic in the 4 by 4grid network.
better than Q-CSMA and simple 802.11 in all PUtraffic loads.
V. CONCLUSION
In this paper, we develop CA-CSMA: athroughput optimal distributed queue length basedCSMA/CA scheduling algorithm for cognitive radionetworks. The algorithm needs to signal a groupof SUs during channel state change, different fromexisting distributed queue-length based CSMA/CAalgorithms. Our algorithm is designed to adapt to thechannel availability dynamics caused by unknownPU activity. The performance of CA-CSMA, MWS,Q-CSMA and a simplified 802.11 are compared insimulations to show the efficacy of CA-CSMA.
In the future, we plan to relax the time-scaleseparation assumption, as in [8], [14], and extendour work to multi-hop and multi-PU cognitive radionetworks. Another topic of future interest is to char-acterize the impact of sensing errors on algorithmdesign.
REFERENCES
[1] Prasanna Chaporkar, Koushik Kar, and Saswati Sarkar.Throughput guarantees through maximal scheduling in wirelessnetworks. In In Proceedings of 43d Annual Allerton Conferenceon Communication, Control and Computing, pages 28–30,2005.
[2] Antonis Dimakis and Jean Walrand. Sufficient conditionsfor stability of longest-queue-first scheduling: Second-orderproperties using fluid limits. Advances in Applied Probability,38(2):pp. 505–521, 2006.
[3] Atilla Eryilmaz, Rayadurgam Srikant, and James R. Perkins.Stable scheduling policies for fading wireless channels.IEEE/ACM Transactions on Networking, 13:411–424, April2005.
This is the author's version of an article that has been published in this journal. Changes were made to this version by the publisher prior to publication.The final version of record is available at http://dx.doi.org/10.1109/TMC.2014.2343613
Copyright (c) 2014 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing [email protected].

14
[4] Javad Ghaderi and Rayadurgam Srikant. On the design ofefficient csma algorithms for wireless networks. In Proc. IEEEconference on Decision and Control, December 2010.
[5] P. Gupta and P.R. Kumar. The capacity of wireless networks.IEEE Transactions on Information Theory, 46(2):388 –404,March 2000.
[6] S. Haykin. Cognitive radio: brain-empowered wireless commu-nications. IEEE Journal on Selected Areas in Communications,23(2):201 – 220, February 2005.
[7] http://grouper.ieee.org/groups/802/22/. Ieee 802.22, workinggroup on wireless regional area networks (wran).
[8] Libin Jiang and Jean Walrand. A distributed csma algorithmfor throughput and utility maximization in wireless networks.IEEE/ACM Transactions on Networking, 18(3):960 –972, June2010.
[9] Changhee Joo, Xiaojun Lin, and N.B. Shroff. Understandingthe capacity region of the greedy maximal scheduling algorithmin multi-hop wireless networks. In INFOCOM 2008. The 27thConference on Computer Communications. IEEE, pages 1103–1111, April 2008.
[10] F. P. Kelly. Reversibility and Stochastic Networks. CambridgeUniversity Press, New York, NY, USA, 2011.
[11] Mathieu Leconte, Jian Ni, and Rayadurgam Srikant. Im-proved bounds on the throughput efficiency of greedy maximalscheduling in wireless networks. In Proceedings of the tenthACM international symposium on Mobile ad hoc networkingand computing, MobiHoc ’09, pages 165–174, New York, NY,USA, 2009. ACM.
[12] Bin Li and Atilla Eryilmaz. A fast-csma algorithm for dead-line constraint scheduling over wireless fading channels. InWorkshop on Resource Allocation and Cooperation in WirelessNetworks (RAWNET), May 2011.
[13] Jian Ni, Bo Tan, and R. Srikant. Q-csma: queue-length basedcsma/ca algorithms for achieving maximum throughput andlow delay in wireless networks. In Proceedings of the 29thconference on Information communications, INFOCOM’10,pages 271–275, Piscataway, NJ, USA, 2010. IEEE Press.
[14] Shreevatsa Rajagopalan, Devavrat Shah, and Jinwoo Shin.Network adiabatic theorem: an efficient randomized protocolfor contention resolution. In Proceedings of the eleventhinternational joint conference on Measurement and modelingof computer systems, SIGMETRICS ’09, pages 133–144, NewYork, NY, USA, 2009. ACM.
[15] F.W. Seelig. A description of the august 2006 xg demonstrationsat fort a.p. hill. In DySPAN 2007. 2nd IEEE InternationalSymposium on New Frontiers in Dynamic Spectrum AccessNetworks, 2007, pages 1 –12, April 2007.
[16] L. Tassiulas and A. Ephremides. Stability properties of con-strained queueing systems and scheduling policies for max-imum throughput in multihop radio networks. IEEE Trans-actions on Automatic Control, 37(12):1936 –1948, December1992.
[17] Rahul Urgaonkar and Michael J. Neely. Opportunistic schedul-ing with reliability guarantees in cognitive radio networks.IEEE Transactions on Mobile Computing, 8:766–777, 2009.
[18] Dongyue Xue and Eylem Ekici. Guaranteed opportunisticscheduling in multi-hop cognitive radio networks. In INFO-COM 2011. The 30th Conference on Computer Communica-tions. IEEE, April 2011.
Shuang Li received her Ph.D in Computer Science from The OhioState University in 2013, M.S. in Computer Science from Auburn
University in 2008, and B.E. in Computer Science from WuhanUniversity of Technology, China in 2005. .
She is currently a software engineer at Google Fiber. Her researchinterests include resource allocation and network optimization inwireless networks, especially in cognitive radio networks, and highperformance routing and switching in optical networks.
Eylem Ekici received the B.S. and M.S. degrees in computerengineering from Bogazici University, Istanbul, Turkey, in 1997 and1998, respectively, and the Ph.D. degree in electrical and computerengineering from the Georgia Institute of Technology, Atlanta, in2002. Currently, he is an Associate Professor with the Departmentof Electrical and Computer Engineering, The Ohio State University,Columbus. His current research interests include cognitive radio net-works, wireless sensor networks, vehicular communication systems,and nano communication systems with a focus on modeling, opti-mization, resource management, and analysis of network architecturesand protocols. Dr. Ekici is an Associate Editor of the IEEE/ACMTRANSACTIONS ON NETWORKING, IEEE Transactions on Mo-bile Computing, Computer Networks, and Mobile Computing andCommunications Review.
Ness Shroff received his Ph.D. degree in Electrical Engineeringfrom Columbia University in 1994. He joined Purdue universityimmediately thereafter as an Assistant Professor in the school of ECE.At Purdue, he became Full Professor of ECE in 2003 and directorof CWSA in 2004, a university-wide center on wireless systems andapplications. In July 2007, he joined The Ohio State University, wherehe holds the Ohio Eminent Scholar endowed chair in Networking andCommunications, in the departments of ECE and CSE. From 2009-2012, he served as a Guest Chaired professor of Wireless Communi-cations at Tsinghua University, Beijing, China, and currently holds anhonorary Guest professor at Shanghai Jiaotong University in China.His research interests span the areas of communication, social, andcyberphysical networks. He is especially interested in fundamentalproblems in the design, control, performance, pricing, and securityof these networks. Dr. Shroff is a past editor for IEEE/ACM Trans.on Networking and the IEEE Communication Letters. He currentlyserves on the editorial board of the Computer Networks Journal,IEEE Network Magazine, and the Networking Science journal. Hehas chaired various conferences and workshops, and co-organizedtwo workshops for the NSF to chart the future of communicationnetworks. Dr. Shroff is a Fellow of the IEEE and an NSF CAREERawardee. His work has received numerous best paper awards for hisresearch, e.g., at IEEE INFOCOM 2008, IEEE INFOCOM 2006,Journal of Communication and Networking 2005, and ComputerNetworks 2003 (his papers also received runner-up awards at IEEEINFOCOM 2005 and IEEE INFOCOM 2013), and also student bestpaper awards (from all papers whose first author is a student) at IEEEWiOPT 2013, IEEE WiOPT 2012, and IEEE IWQoS 2006.
This is the author's version of an article that has been published in this journal. Changes were made to this version by the publisher prior to publication.The final version of record is available at http://dx.doi.org/10.1109/TMC.2014.2343613
Copyright (c) 2014 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing [email protected].















![Approaching Throughput-optimality in Distributed …arXiv:1011.3594v1 [cs.NI] 16 Nov 2010 1 Approaching Throughput-optimality in Distributed CSMA Scheduling Algorithms with Collisions](https://img.pdfslide.us/doc/110x75/5e66c8d9b51fc3670b3024e3/approaching-throughput-optimality-in-distributed-arxiv10113594v1-csni-16-nov.jpg)