Embed Size (px)
Citation preview

1
Coexistence of Age and Throughput OptimizingNetworks: A Spectrum Sharing Game
Sneihil Gopal∗, Sanjit K. Kaul∗, Rakesh Chaturvedi† and Sumit Roy‡∗Wireless Systems Lab, IIIT-Delhi, India, †Department of Social Sciences & Humanities, IIIT-Delhi, India
‡University of Washington, Seattle, WA{sneihilg, skkaul, rakesh}@iiitd.ac.in, [email protected]
Abstract—We investigate the coexistence of an age optimizingnetwork (AON) and a throughput optimizing network (TON)that share a common spectrum band. We consider two modesof long run coexistence: (a) networks compete with each otherfor spectrum access, causing them to interfere and (b) networkscooperate to achieve non-interfering access.
To model competition, we define a non-cooperative stage gameparameterized by the average age of the AON at the beginningof the stage, derive its mixed strategy Nash equilibrium (MSNE),and analyze the evolution of age and throughput over an infinitelyrepeated game in which each network plays the MSNE at everystage. Cooperation uses a coordination device that performs acoin toss during each stage to select the network that mustaccess the medium. Networks use the grim trigger punishmentstrategy, reverting to playing the MSNE every stage forever if theother disobeys the device. We determine if there exists a subgameperfect equilibrium, i.e., the networks obey the device forever asthey find cooperation beneficial. We show that networks choose tocooperate only when they consist of a sufficiently small number ofnodes, otherwise they prefer to disobey the device and compete.Index Terms—Age of information, spectrum sharing, repeatedgame, CSMA/CA based medium access.
I. INTRODUCTION
The emerging Internet-of-Things (IoT) will require largenumber of (non-traditional) devices to sense and commu-nicate information (either their own status or that of theirproximate environment) to a network coordinator/aggregatoror other devices. Applications include real-time monitoringfor disaster management, environmental monitoring, industrialcontrol and surveillance [1, references therein], which requiretimely delivery of updates to a central station. Another set ofpopular applications include vehicular networking for futureautonomous operations where each vehicular node broadcastsa vector (e.g. position, velocity and other status information)to enable applications like collision avoidance and vehiclecoordination like platooning [2].
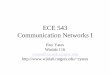
In many scenarios, such new IoT networks will use exist-ing (and potentially newly allocated) unlicensed bands, andhence be required to share the spectrum with incumbentnetworks. For instance, the U.S. Federal CommunicationsCommission (FCC) recently opened up the 5.85− 5.925 GHzband, previously reserved for vehicular dedicated short rangecommunication (DSRC) for use by high throughput WiFi,leading to the need for spectrum sharing between WiFi andvehicular networks [3]. Figure 1 provides an illustration inwhich a WiFi access point communicates with its client in
V2V Direct Communication V2X Communication
Roadside Unit Wave/IEEE 802.11p
V2I Communication
WiFi Access Point
WiFi Client
Fig. 1: Example spectrum sharing scenario where a WiFi AP-clientlink shares the 5.85−5.925 GHz band with a DSRC-based vehicularnetwork. The band previously reserved for vehicular communicationwas recently opened by the FCC in the US for use by WiFi (802.11ac) devices [3].
the vicinity of a DSRC-based vehicular network. Similarly,Unmanned Aerial Vehicles (UAVs) [1] equipped with WiFitechnology used for (wide-area) environmental monitoring willneed to share spectrum with regular terrestrial WiFi networks.
Networks of such IoT devices would like to optimizefreshness of status. In our work, we measure freshness usingthe age of information [4] metric. Such networks, hereafterreferred to as age optimizing networks (AON) will need toco-exist with traditional data networks such as WiFi designedto provide high throughput for its users, hereafter, throughputoptimizing networks (TON). This work explores strategies fortheir coexistence using a repeated game theoretic approach.For symmetry, we assume that both networks use a WiFi-like CSMA/CA (Carrier Sense Multiple Access with CollisionAvoidance) based medium access protocol. Each CSMA/CAslot represents a stage game whereby all networks are assumedto be selfish players that optimize their own long-run utility.While an AON wants to minimize the discounted sum averageage of updates of its nodes (at a monitor), a TON wants tomaximize the discounted sum average throughput.
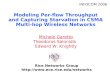
We consider two modes of coexistence namely competitionand cooperation. When competing, as shown in Figure 2a,nodes in the networks probabilistically interfere with those ofthe other as they access the shared medium. We model the
arX
iv:1
909.
0286
3v2
[cs
.GT
] 3
Feb
202
0

2
Stage 1 Stage 2 Stage n
Both AON and TON probabilistically access the spectrum and play MSNE in each stage
Networks play MSNE
Networks play MSNE
Networks play MSNE
(a) Competitive Mode of Coexistence
AON accesses
TON backs off
AON backs off AON backs off
TON accesses TON accesses
Both AON and TON obey the recommendation of the coordination device and play optimal strategy in each stage
Stage 1: Heads is observed on tossing the
coin.
Stage 2: Tails is observed on tossing the
coin.
Stage n: Tails is observed on tossing the
coin.
(b) Cooperative Mode of Coexistence
Fig. 2: Illustration of different modes of coexistence. (a) Networks compete and probabilistically access the shared spectrum in every stageof the repeated game. (b) Networks cooperate and cooperation is enabled using a coordination device which tosses a coin in every stage ofthe repeated game and recommends the AON (resp. the TON) to access the shared spectrum when heads (resp. tails) is observed on tossingthe coin and the TON (resp. the AON) to backoff.
AON accesses
TON backs off
AON accesses
TON accesses
Stage 1: Heads is observed on tossing the coin.
Stage 2: Tails is observed on tossing the coin.
Stage 3 Stage n
Networks play MSNE
Networks play MSNE
Fig. 3: Illustration of the proposed coexistence etiquette, where, theAON disobeys the recommendation of the device in stage 2 such thatthe grim trigger comes into play, and the networks revert to usingthe MSNE from stage 3 onward.
interaction between an AON and a TON in each CSMA/CAslot as a non-cooperative stage game and derive its mixedstrategy Nash equilibrium (MSNE). We study the evolutionof the equilibrium strategy over time, when players play theMSNE in each stage of the repeated game, and the resultingutilities of the networks.
When cooperating, as shown in Figure 2b, a coordinationdevice schedules the networks to access the medium such thatnodes belonging to different networks don’t interfere with eachother. The coordination device uses a coin toss in every stageto recommend who between the AON and TON must accessthe medium during the slot. Similar to the competitive mode,we define the stage game and derive the optimal strategy thatnetworks would play in a stage, if chosen by the device toaccess the medium.
Next, we check whether networks prefer cooperation tocompetition over the long run. To do so, we propose a coexis-
tence etiquette, where, if in any stage a network doesn’t followthe device’s recommendation, networks revert to using theMSNE forever. In other words, if a network doesn’t cooperatein any stage, networks stop cooperating and start competingin the stages thereafter. Such a strategy is commonly referredto as grim trigger [5] because it includes a trigger: once anetwork deviates from the device’s recommendation, this isthe trigger that causes the networks to revert their behavior toplaying the MSNE forever. Figure 3 illustrates an examplescenario where the coexistence etiquette is employed. TheAON disobeys the recommendation of the device in stage 2such that the grim trigger comes into play, and networks revertto using the MSNE forever from stage 3 onward. One wouldexpect that grim trigger will have networks always obey thedevice if in fact they preferred cooperation to competition inthe long run. We identify when networks prefer cooperationby checking if the strategy profile that results by obeying thedevice forms a subgame-perfect equilibrium (SPE) [5].
Further, we employ the proposed coexistence etiquette totwo cases of practical interest (a) when collision slots (morethan one node accesses the channel leading to all transmissionsreceived in error) are at least as large as slots that see asuccessful (interference free) data transmission by exactly onenode, and (b) collision slots are smaller than a successfuldata transmission slot. To exemplify, while the former holdswhen networks use the basic access mechanism defined forthe 802.11 MAC [6], the latter is true for networks employingthe RTS/CTS∗ based access mechanism [6].
We show that in both cases networks prefer cooperationwhen they have a small number of nodes. However, for largenumbers of nodes, networks end up competing, as disobeyingthe coordination device benefits one of them. Specifically,
∗In RTS/CTS based access mechanism, under the assumption of perfectchannel sensing, collisions occur only when RTS frames are transmitted,which are much smaller than data payload frames, and hence a collision slotis smaller than a successful transmission slot.

3
when collision slots are at least as large as successful trans-mission slots, the TON finds competition more favorable,i.e., sees higher throughput, and the AON finds cooperationmore beneficial, i.e., sees smaller age, whereas, when collisionslots are smaller than successful transmission slot, the TONprefers cooperation and the AON competition. Our analysisshows that in the former, occasionally the AON refrains fromtransmitting during a slot. If competing, such slots allow theTON interference free access to the medium. If cooperating,such slots are not available to the TON. Thus, competingimproves TON’s payoff. In contrast, in the latter, the AON seesbenefit in accessing the medium aggressively. Competitionimproves the AON payoff.
Next, in Section II, we give an overview of related works. InSection III we describe the network model. This is followedby Section IV in which we discuss the formulation of thenon-cooperative stage game, derive the mixed strategy NashEquilibrium (MSNE) and analyze the repeated game withcompetition. In Section V we discuss the stage game withcooperation, derive the optimal strategies that networks wouldplay and analyze the repeated game. We describe the proposedcoexistence etiquette in detail in Section VI. Computationalanalysis is carried out in Section VII where we describe theevaluation setup and also state our main results. We concludein Section VIII.
II. RELATED WORK
Recent works such as [3], [7]–[9] studied the coexistenceof DSRC based vehicular networks and WiFi. In these earlierworks authors provided an in-depth study of the inherentdifferences between the two technologies, the coexistencechallenges and proposed solutions to improve coexistence.However, the aforementioned works looked at the coexistenceof DSRC and WiFi as the coexistence of two CSMA/CA basednetworks, with different MAC parameters, where the packetsof the DSRC network took precedence over that of the WiFinetwork. Also, in [3], [7]–[9] authors proposed tweaking theMAC parameters of the WiFi network in order to protectthe DSRC network. In contrast to [3], [7]–[9], we look atthe coexistence problem as that of coexistence of networkswhich have equal access rights to the spectrum, use similaraccess mechanisms but have different objectives. While theWiFi network (TON) aims to maximize throughput and theDSRC network (AON) desires to minimize age.
In [10]–[14] authors employed game theory to study thebehavior of nodes in wireless networks. In [10] authors studiedthe behavior of competing users sharing a channel using Alohaand showed the existence of equilibrium that could be reachedby the users for given throughput demands. In [11] authorsstudied the selfish behavior of nodes in CSMA/CA networksand proposed a distributed protocol to guide multiple selfishnodes to operate at a Pareto-optimal Nash equilibrium. In [12]authors studied user behavior under a generalized slotted-Aloha protocol, identified throughput bounds for a systemof cooperative users and explored the trade-off between userthroughput and short-term fairness. In [13] authors analyzedNash equilibria in multiple access with selfish nodes and
in [14] authors developed a game-theoretic model calledrandom access game for contention control and proposed anovel medium access method derived from CSMA/CA thatcould stabilize the network around a steady state that achievesoptimal throughput.
While throughput as the payoff function has been exten-sively studied from the game theoretic point of view (see[10]–[14]), age as a payoff function has not garnered muchattention yet. In [15], the authors investigated minimizing theage of status updates sent by vehicles over a CSMA network.The concept was further investigated in the context of wirelessnetworks in [16]–[19]. In [20]–[23] authors studied games withage as the payoff function. In [20] and [21], authors studiedan adversarial setting where one player aims to maintain thefreshness of information updates while the other player aimsto prevent this. In earlier work [22], we proposed a gametheoretic approach to study the coexistence of DSRC andWiFi, where the DSRC network desires to minimize the time-average age of information and the WiFi network aims tomaximize the average throughput. We studied the one-shotgame and evaluated the Nash and Stackelberg equilibriumstrategies. However, the model in [22] did not capture well theinteraction of networks, evolution of their respective strategiesand payoffs over time, which the repeated game model allowedus to capture in [23]. In [23], via the repeated game model wewere able to shed better light on the AON-TON interactionand how their different utilities distinguish their coexistencefrom the coexistence of utility maximizing CSMA/CA basednetworks. In this work, we extend the work in [23] and explorethe possibility of cooperation between an AON and a TON.
Works such as [24]–[26] employed repeated games in thecontext of coexistence. Since repeated games might fostercooperation, authors in [24] studied a punishment-based re-peated game to model cooperation between multiple networksin an unlicensed band and illustrated that under certain con-ditions selfish behavior incur negligible losses and whetherthe systems cooperate or not does not have much influenceon the performance. Similar to [24], authors in [25] studied apunishment-based repeated game to incorporate cooperation,however, they also proposed mechanisms to ensure user hon-esty. Contrary to the above works, where coexisting networkshave similar objectives and the equilibrium strategies are staticin each stage, networks in our work have different objectivesand the equilibrium strategy of the AON, as we show later, isdynamic and evolves over stages.
III. NETWORK MODEL
Let NA = {1, 2, . . . ,NA} and NT = {1, 2, . . . ,NT} denotethe set of nodes in the AON and the TON, respectively, thatcontend for access to the shared wireless medium. Both AONand TON nodes use a CSMA/CA based access mechanism.For the purposes of this section, network represents a groupof nodes that contend for the medium without reference towhether the nodes belong to the AON or the TON. We defineevents and probabilities that will appear in the context of bothcompetition and cooperation. We assume that all nodes cansense each other’s packet transmissions. This allows modeling

4
TABLE I: Glossary of Terms
Parameter Definition
NSet of players. N = {A,T}, A denotes AON andT denotes TON.
SkSet of pure strategies of player k ∈ N . Sk ={T , I}, T denotes transmit and I denotes idle.
NA, NT Number of nodes in the AON and the TON.NA,NT Set of nodes in the AON and the TON. NA =
{1, 2, . . . ,NA} and NT = {1, 2, . . . ,NT}.σI, σS, σC Length of an idle slot, successful transmission slot
and collision slot.
pI,NC, pI,CProbability of an idle slot in competitive or non-cooperative (NC) mode and cooperative (C) modeof coexistence.
p(i)S,NC, p
(i)S,C
Probability of a successful transmission by node i ina slot in competitive or non-cooperative (NC) modeand cooperative (C) mode of coexistence.
pS,NC, pS,CProbability of a successful transmission in a slotin competitive or non-cooperative (NC) mode andcooperative (C) mode of coexistence.
p(i)B,NC, p
(i)B,C
Probability that a busy slot is seen by node i incompetitive or non-cooperative (NC) mode and co-operative (C) mode of coexistence.
pC,NC, pC,CProbability that a collision occurs in a slot in compet-itive or non-cooperative (NC) mode and cooperative(C) mode of coexistence.
Γ Average throughput of the TON in a slot.
∆−, ∆Average age of status updates of nodes in an AONat the beginning and end of a stage.
τ∗A, τ∗T
Access probability of an AON node and a TON nodein the competitive mode.
τA, τTAccess probability of an AON node and a TON nodein the cooperative mode.
φ∗(τ∗A, τ∗T) Mixed strategy Nash Equilibrium.
α Discount factor, α ∈ (0, 1).
PRProbability of obtaining heads (H) on coin toss bythe coordination device.
ukNC
, ukC
Stage game payoff for player k ∈ N for the compet-itive or non-cooperative (NC) mode and cooperative(C) mode of coexistence.
UkNC
, UkC
Average discounted payoff for player k ∈ N forthe competitive or non-cooperative (NC) mode andcooperative (C) mode of coexistence.
the CSMA/CA mechanism as a slotted multiaccess system.A slot may be an idle slot in which no node transmits apacket or it may be a slot that sees a successful transmission.This happens when exactly one node transmits. If more thanone node transmits, none of the transmissions are successfullydecoded and the slot sees a collision. Further, we assume thatall nodes always have a packet to send. We give the definitionsof the parameters used in this paper in Table I.
Let pI be the probability of an idle slot, which is a slotin which no node transmits. Let p(i)
S be the probability of asuccessful transmission by node i in a slot and let pS be theprobability of a successful transmission in a slot. We say thatnode i sees a busy slot if in the slot node i doesn’t transmit andexactly one other node transmits. Let p(i)
B be the probabilitythat a busy slot is seen by node i. Let pC be the probabilitythat a collision occurs in a slot.
Let σI , σS and σC denote the lengths of an idle, successful,and collision slot, respectively. Next, we define the throughputof a TON node and the age of an AON node, respectively,in terms of the above probabilities and slot lengths. We will
∆i(t)
σS
∆i(0)
t1 t2 t3 tn tn+1t4 t5 t
Fig. 4: Sample path of age ∆i(t) of AON node i’s update at otherAON nodes. ∆i(0) is the initial age. A successful transmission resetsthe age to σS. The time instants tn, where, n ∈ {1, 2, . . . }, show theslot boundaries. The slot lengths are determined by the type of slot.
detail the calculation of these probabilities for the competitiveand the cooperative mode in Section IV and Section V,respectively.
A. Throughput of a TON node over a slot
Let the rate of transmission be fixed to r bits/sec in any slot.Define the throughput Γi of any TON node i ∈ NT, in a slotas the number of bits transmitted successfully in the slot. Thisis a random variable with probability mass function (PMF)
P [Γi = γ] =
p(i)S γ = σSr,
1− p(i)S γ = 0,
0 otherwise.
(1)
Thus the average throughput Γi of node i is
Γi = p(i)S σSr. (2)
The average throughput of the TON in a slot is
Γ =1
NT
NT∑
i=1
Γi. (3)
We assume that the throughput in a slot is independent of thatin the previous slots†.
B. Age of an AON node over a slot
Let ui(t) be the timestamp of the most recent status updateof any AON node i ∈ NA, at other nodes in the AON at time t.The status update age of node i at AON node j ∈ NA\i at timet is the stochastic process ∆i(t) = t−ui(t). We assume that astatus update packet that AON node i attempts to transmit ina slot contains an update that is fresh at the beginning of theslot. As a result, node i’s age at any other node j either resetsto σS if a successful transmission occurs or increases by σI,σC or σS at all other nodes in the AON, respectively, when anidle slot, collision slot or a busy slot occurs. Note that nodei’s age at the end of a slot is determined by its age at thebeginning of the slot and the type of the slot. Figure 4 showsan example sample path of the age ∆i(t). In what follows
†Our assumption is based on the analysis in [6], where the author assumesthat at each transmission attempt, regardless of the number of retransmissionssuffered, the probability of a collision seen by a packet being transmitted isconstant and independent.

5
−(∆1(0) + σC), 0
−(∆1(0) + σS), σSr
−σS, 0
−(∆1(0) + σI), 0
T I
T
IA(A
ON
)
T(TON)
(a)
−2.02, 0
−2.02, 1.01
−1.01, 0
−1.02, 0
T I
T
IA(A
ON)
T(TON)
(b)
Fig. 5: Payoff matrix for the game GNC when the AON and the TONhave one node each. We use negative payoffs for player A (AON),since it desires to minimize age. (a) Shows the payoff matrix withslot lengths and AoI value at the end of the stage 1. (b) Shows thepayoff matrix obtained by substituting σS = σC = 1 + β, σI = β‡,∆1(0) = 1 + β and β = 0.01. (T , T ), (T , I) and (I, T ) are thepure strategy Nash equilibria.
we will drop the explicit mention of time t and let ∆i be theage of node i’s update at the end and ∆−i be the age at thebeginning of a given slot.
The age ∆i at the end of a slot is thus a random variablewith PMF conditioned on age at the beginning of a slot, givenby
P [∆i = δi|∆−i = δ−i ] =
pI δi = δ−i + σI,
pC δi = δ−i + σC,
p(i)B δi = δ−i + σS,
p(i)S δi = σS,
0 otherwise.
(4)
Using (4), we define the conditional expected age
∆i∆= E[∆i = δi|∆−i = δ−i ].
= (1− p(i)S )δ−i + (pIσI + pSσS + pCσC). (5)
The average age of status updates of nodes in an AON at theend of the slot, is
∆ =1
NA
NA∑
i=1
∆i. (6)
IV. COMPETITION BETWEEN AN AON AND A TONWe define a repeated game to model the competition be-
tween an AON and a TON. In every CSMA/CA slot, networksmust contend for access with the goal of maximizing theirexpected payoff over an infinite horizon (a countably infinitenumber of slots). We capture the interaction in a slot as anon-cooperative stage game GNC, where NC stands for non-cooperation or competition and derive it’s mixed strategy Nashequilibrium (MSNE). The interaction over the infinite horizonis modeled as the stage game GNC played repeatedly in everyslot and is denoted by G∞
NC. Next, we discuss the games GNC
and G∞NC
in detail.
A. Stage gameWe define a parameterized strategic one-shot game [28]
GNC = (N , (Sk)k∈N , (uk)k∈N , ∆−), where N is the set of
‡We set the values of σI, σS and σC based on the analysis of CSMA slottedAloha in [27], where the authors assume that idle slots have a duration β andall data packets have unit length. Nodes in CSMA are allowed to transmitonly after detecting an idle slot, i.e., each successful transmission slot andcollision slot is followed by an idle slot. Hence, σS = σC = (1 + β).
players, Sk is the set of pure strategies of player k, uk is thepayoff of player k and ∆− is the additional parameter inputto the game GNC, which is the average age (6) of the AONat the beginning of the slot.
• Players: The AON and the TON are the players. We denotethe former by A and the latter by T. We have N = {A,T}.
• Strategy: Let T denote transmit and I denote idle. For anAON comprising of NA nodes, the set of pure strategiesis SA , S1 × S2 × · · · × SNA
, where Si = {T , I} is theset of strategies of an AON node i. Similarly, for a TONcomprising of NT nodes, the set of pure strategies is ST ,S1 × S2 × · · · × SNT .We allow networks to play mixed strategies. For the strategicgame GNC define Φk as the set of probability distributionsover the set of strategies Sk of player k ∈ N . A mixedstrategy for player k is an element φk ∈ Φk, where φkis a probability distribution over Sk. For example, for anAON with NA = 2, the set of pure strategies is SA = S1 ×S2 = {(T , T ), (T , I), (I, T ), (I, I)} and the probabilitydistribution over SA is φA, such that φA(sA) ≥ 0 for allsA ∈ SA and
∑sA∈SA φA(sA) = 1.
In this work, we restrict ourselves to the space of probabilitydistributions such that the mixed strategies of the AON area function of τA and that of the TON are a function of τT,where τA and τT, are the probabilities with which nodesin an AON and a TON, respectively, attempt transmissionin a slot. Specifically, we force all the nodes to choosethe same probability to attempt transmission. As a result,the probability distribution for an AON with NA = 2,parameterized by τA, is φA(τA) = {τ2
A, τA(1 − τA), (1 −τA)τA, (1− τA)2}. Similarly, for a TON with NT = 2, theprobability distribution parameterized by τT, is φT(τT) ={τ2
T, τT(1− τT), (1− τT)τT, (1− τT)2}.• Payoffs: We have NT throughput optimizing nodes that
attempt transmission with probability τT and NA age op-timizing nodes that attempt transmission with probabilityτA. As defined in Section III, for the non-cooperative gameGNC, let pI,NC be the probability of an idle slot, pS,NC bethe probability of a successful transmission in a slot, p(i)
S,NCbe the probability of a successful transmission by node i,p
(i)B,NC be the probability of a busy slot seen by node i andpC,NC be the probability of collision. We have
pI,NC = (1− τA)NA(1− τT)NT , (7a)
pS,NC = NAτA(1− τA)(NA−1)(1− τT)NT
+ NTτT(1− τT)(NT−1)(1− τA)NA , (7b)
p(i)S,NC =
{τA(1− τA)(NA−1)(1− τT)NT , ∀i ∈ NA,
τT(1− τT)(NT−1)(1− τA)NA , ∀i ∈ NT,
(7c)
p(i)B,NC =
(NA − 1)τA(1− τA)(NA−1)(1− τT)NT
+ NTτT(1− τT)(NT−1)(1− τA)NA , ∀i ∈ NA,
(NT − 1)τT(1− τT)(NT−1)(1− τA)NA
+ NAτA(1− τA)(NA−1)(1− τT)NT , ∀i ∈ NT,(7d)
pC,NC = 1− pS,NC − pI,NC. (7e)

6
The probabilities (7a)-(7e) can be substituted in (1)-(2)and (4)-(5), respectively, to calculate the average through-put (3) and average age (6). We use these to obtain the stagepayoffs uT
NCand uA
NCof the TON and the AON. They are
uTNC(τA, τT) = Γ(τA, τT), (8)
uANC(τA, τT) = −∆(τA, τT). (9)
The networks would like to maximize their payoffs.
B. Mixed Strategy Nash Equilibrium
Figure 5 shows the payoff matrix when each networkconsists of a single node. As stated in [29], every finitenon-cooperative game has a mixed strategy Nash equilibrium(MSNE). For the game GNC defined in Section IV-A, a mixed-strategy profile φ∗(τ∗A, τ
∗T) = (φ∗A(τ∗A), φ∗T(τ∗T)) is a Nash
equilibrium [29], if φ∗A(τ∗A) and φ∗T (τ∗T) are the best responsesof player A and player T, to their respective opponents’ mixedstrategy. We have
uTNC(φ∗A, φ
∗T ) ≥ uT
NC(φ∗A, φT ), ∀φT ∈ ΦT ,
uANC(φ∗A, φ
∗T ) ≥ uA
NC(φA, φ∗T ), ∀φA ∈ ΦA,
where, φ∗(τ∗A, τ∗T) ∈ Φ and Φ = ΦT ×ΦA is the profile of
mixed strategy. Recall that the probability distributions φA(τA)and φT(τT) are parameterized by τA and τT, respectively.Proposition 1 gives the mixed strategy Nash equilibrium.
Proposition 1. The mixed strategy Nash equilibrium for thegame GNC is given by the probabilities τ∗A and τ∗T, where
τ∗A =
(1− τ∗T)(∆− − NA(σS − σI)) + NANTτ
∗T(σS − σC)(
(1− τ∗T)NA(∆− + (σI − σC)− NA(σS − σC))
+ NANTτ∗T(σS − σC)
)∆
−> Θth,
1 ∆− ≤ Θth & Θth = Θth,1,
0 ∆− ≤ Θth & Θth = Θth,0.
(10a)
τ∗T =
1
NT
. (10b)
where, Θth = max{Θth,0,Θth,1}, Θth,0 = NA(σS − σI) −NANTτ
∗T(σS−σC)
(1−τ∗T) and Θth,1 = NA(σS − σC).
Proof: The proof is given in Appendix A of the supplementarymaterial.
Note in (10a) and (10b) that τ∗A is a function of averageage ∆− observed at the beginning of the slot and the numberof nodes in both the networks, whereas, τ∗T is only a functionof number of nodes in the TON. The threshold value Θth caneither take a value equal to Θth,0 or Θth,1. For instance, whenNA = 1, NT = 1, and σS > σC, the threshold value Θth isequal to Θth,1 = (σS − σC) resulting in τ∗A = 1. In contrast,when σS < σC for NA = 1, NT = 1 the threshold value Θthis equal to Θth,0 = ∞, and since ∆− ≤ ∞, τ∗A in this caseis 0. Note that while the parameter τ∗T corresponding to theTON is equal to 1, for all selections of σC, the AON choosesτ∗A = 1 when σS > σC, and τ∗A = 0 when σS < σC. This isbecause when σS < σC the increase in age due to a successfultransmission by the TON, which has τ∗T = 1, is less than thatdue to a collision that would have happened if the AON choseτA = 1. We discuss this in detail in Section IV-C.
1 2 5 10 500
0.2
0.4
0.6
0.8
1
NT
τ∗ T
(a) TON access probability τ∗T
1 2 5 100
0.2
0.4
0.6
0.8
1
NA
τ∗ A
NT = 2 NT = 5 NT = 10
(b) AON access probability τ∗A
2 5 10 500
0.05
0.1
0.15
0.2
0.25
NT
uT(τ
∗ A,τ
∗ T)
NA = 2 NA = 5 NA = 10
(c) TON stage payoff
2 5 10 50−200
−150
−100
−50
0
NA
uA(τ
∗ A,τ
∗ T)
NT = 2 NT = 5 NT = 10
(d) AON stage payoff
Fig. 6: Access probabilities and stage payoff of the TON and theAON for different selections of NT and NA when networks choose toplay the MSNE. The stage payoff corresponds to ∆− = Θth,0 + σS,σS = 1 + β, σC = 2(1 + β), σI = β and β = 0.01.
A distinct feature of the stage game is the effect of self-contention and competition on the network utilities§. We defineself-contention as the impact of nodes within one’s ownnetwork and competition as the impact of nodes in the othernetwork, respectively, on the network utilities. Figure 6 showsthe affect of self-contention and competition on the accessprobabilities and stage payoffs. We choose ∆− = Θth,0 + σSas it gives τ∗A ∈ (0, 1) (see (10a)). As shown in Figure 6aand Figure 6c, while the access probability τ∗T for the TONis independent of the number of nodes in the AON, thepayoff of the TON increases as the number of nodes in theAON increase. Intuitively, since increase in the number ofAON nodes results in increase in competition, the payoff ofthe TON should decrease. However, the payoff of the TONincreases. For example, for NT = 2, as shown in Figure 6c,the payoff of the TON increases from 0.2044 to 0.2451 as NA
increases from 2 to 10. This increase is due to increase in self-contention within the AON which forces it to be conservative.Specifically, as shown in Figure 6b, the access probability τ∗Adecreases with increase in the number of nodes in the AON.For NT = 2, τ∗A decreases from 1 to 0.0001 as NA increasesfrom 1 to 50. This benefits the TON. Similarly as shown inFigure 6d, as the number of TON nodes increases the payoffof the AON improves, since the access probability of the TONdecreases (see Figure 6a).
For the game GNC, when σS = σC, the access probabilitiesτ∗A and τ∗T are shown in Corollary 1. They are independentof the number of nodes in the other network and their accessprobability.
Corollary 1. The mixed strategy Nash equilibrium for thegame GNC when σS = σC is obtained using (10a) and is
§We had earlier observed self-contention and competition in [22] where weconsidered an alternate one-shot game and in [23] where we studied arepeated game with competing networks.

7
0 50 100 150 2000.2
0.4
0.6
0.8
1
n (stage)
τ∗ k
AON TON
(a)
0 50 100 150 2000
0.05
0.1
0.15
0.2
0.25
n (stage)
τ∗ k
AON TON
(b)
0 50 100 150 2000
0.05
0.1
0.15
0.2
0.25
n (stage)
τ∗ k
AON TON
(c)
Fig. 7: Illustration of per stage access probability τ∗k (k ∈ {A,T}) of the AON and the TON when (a) σC = 0.1σS, (b)σC = σS, and (c) σC = 2σS. The results correspond to NA = 5,NT = 5, σS = 1 + β, σI = β and β = 0.01.
given by
τ∗A =
{NA(σI−σS)+∆−
NA(σI−σC+∆−)∆− > NA(σS − σI),
0 otherwise .(11a)
τ∗T =1
NT. (11b)
This equilibrium strategy of each network is also its dominantstrategy.
C. Repeated game
We consider an infinitely repeated game, defined as G∞NC
,in which the one-shot game GNC, where, players play theMSNE (10), is played in every stage (slot) n ∈ {1, 2, . . . }.We consider perfect monitoring [28], i.e., at the end of eachstage, all players observe the action profile chosen by everyother player.¶ In addition to the action profiles, players alsoobserve ∆−(n), i.e., the average age of the AON at the end ofstage n− 1. The AON equilibrium strategy as shown in (10a)in any stage is a function of ∆−(n) and this intertwines theutilities of the networks.
Player k’s average discounted payoff for the game G∞NC
,where k ∈ N is
UkNC = Eφ
{(1− α)
∞∑
n=1
αn−1ukNC(φ)
}, (12)
where, the expectation is taken with respect to the strategyprofile φ, uk
NC(φ) is player k’s payoff in stage n and 0 <
α < 1 is the discount factor. A discount factor α closer to1 means that the player values not only the stage payoff butalso the impact of its action on payoffs in the future, i.e., theplayer is far-sighted, whereas α closer to 0 means that theplayer is myopic and values more the payoffs in the short-term. By substituting (8) and (9) in (12), we can obtain theaverage discounted payoffs UT
NCand UA
NC, of the TON and
the AON, respectively.Figure 7 shows the access probabilities of the TON and the
AON for the repeated game G∞NC
when (a) σS > σC (seeFigure 7a), and (b) σS ≤ σC (see Figure 7b for σS = σCand Figure 7c for σS < σC). We set NA = NT = 5, σS =1 + β, σC = 0.1σS, σI = β and β = 0.01. As a result, the
¶We leave the study of more realistic assumptions of imperfect and privatemonitoring to the future.
threshold values in (10a), i.e., Θth,0 and Θth,1, are −0.6812 and4.5450, respectively, resulting in Θth = max{Θth,0,Θth,1} =
4.5450. Since Θth,0 and Θth,1 are independent of ∆− (seeProposition 1), the resulting Θth is constant across all stagesof the repeated game G∞
NC. As a result, as shown in Figure 7a,
τ∗A = 1 for n ∈ {1, . . . , 36} since ∆−(n) < 4.5450. However,for n = 37, τ∗A = 0.9295 as ∆−(37) = 4.6460 exceeds thethreshold value. Similarly, the threshold value in (11a), whenσS = σC, is NA(σS − σI) = 5. As a result, as shown inFigure 7b, nodes in the AON access the medium with τ∗A ∈(0, 1) in any stage n only if the average age in the (n− 1)th
stage exceeds the threshold value, i.e., ∆−(n) > 5, otherwiseτ∗A = 0.
Note that when σS ≤ σC, nodes in the AON as shown in Fig-ure 7b and Figure 7c, occasionally refrain from transmission,i.e., choose τ∗A = 0 during a stage. In contrast, when σS > σC,nodes in the AON as shown in Figure 7a, often access themedium aggressively, i.e., with τ∗A = 1 during a stage. Sucha behavior of nodes in the AON is due to the presence of theTON. As the length of the collision slot decreases, the impactof collision on the age of the AON reduces. If nodes in theAON choose to refrain from transmission, the average age ofthe AON will depend on the events – successful transmission,collision or idle slot, happening in the TON. Whereas if nodesin the AON choose to transmit aggressively with τ∗A = 1,the average age of the AON would only be impacted by thecollision slot. For instance, for a coexistence scenario withNA = NT = 5, σS = 1+β, σC = 0.1σS, σI = β, β = 0.01 and∆− = σS, if τA = 0, the average age in the stage computedusing (6) is 1.4535, whereas, if τA = 1, the average age is1.1110. As a result, due to reduced impact of collision, nodesin the AON choose to contend with the TON aggressively forthe medium and transmit with τ∗A = 1 during a stage.
V. COOPERATION BETWEEN AN AON AND A TON
Consider the 2-player one-shot game shown in Figure 5b.Figure 8 shows the convex hull of payoffs corresponding to it.The game has three pure strategy Nash Equilibria, i.e., (T , T ),(T , I) and (I, T ), which have, respectively either both thenetworks transmit or one of them transmit and the other idle.The corresponding MSNE is given by φ∗A = {1, 0} and φ∗T ={1, 0}. Both networks transmit with probability 1.
Now suppose that the players cooperate and comply withthe recommendation of a coordination device, which proba-

8
-1
1
uA
uT(T , I)
(I, I)(I, T )(T , T )
-2
Fig. 8: The convex hull of payoffs for the 2-player one-shot game(see Figure 5b).
bilistically chooses exactly one player to transmit in a stagewhile the other idles. Say, with probability 0.5, the device rec-ommends that the AON transmit and the TON stays idle. Theexpected payoff of the AON is (−1.01×PR−2.02×(1−PR)) =−1.515 and that of the TON is (0× PR + 1.01× (1− PR)) =0.505, which is more than what the AON and the TON wouldget had they played the MSNE, i.e., payoffs of −2.02 and 0,respectively.
As exemplified above, players may achieve higher expectedone-shot payoffs in case they cooperate instead of playing theMSNE (10). This motivates us to enable cooperation betweenan AON and a TON in the following manner. Consider acoordination device that picks one of the two networks toaccess (A) the shared spectrum in a slot and the other tobackoff (B). To arrive at its recommendation, the device tossesa coin with the probability of obtaining heads (H), P[H] = PR,and that of obtaining tails (T), P[T] = (1−PR). In case H (resp.T) is observed on tossing the coin, the device picks the AON(resp. the TON) to access the medium and the TON (resp. theAON) to backoff.
Note that the recommendation of the device allows in-terference free access to the spectrum and eliminates theimpact of competition, leaving the networks to deal with self-contention alone. We assume that the probabilities and therecommendations are common knowledge to players.
A. Stage game with cooperating networks
We begin by modifying the network model defined inSection III to incorporate the recommendation of the coor-dination device PR. The AON gets interference free accessto the spectrum with probability PR. Let τA denote theoptimal probability with which nodes in the AON must attempttransmission, given that the AON has access to the spectrum.Let τT be the corresponding probability for the TON.
Proposition 2. The optimal strategy of the one-shot game GCwhen networks cooperate is given by the probabilities τA andτT . We have
τA =
∆− −NA(σS − σI)
NA(∆− + (σI − σC)−NA(σS − σC))∆− > Θth,
1 ∆− ≤ Θth & Θth = Θth,1,
0 ∆− ≤ Θth & Θth = Θth,0.(13a)
τT =1
NT. (13b)
where, Θth = max{Θth,0,Θth,1}, Θth,0 = NA(σS − σI) andΘth,1 = NA(σS − σC).Proof: The proof is given in Appendix B of the supplementarymaterial.
Similar to (10a), the optimal strategy τA (13a) of the AONin any slot is a function of ∆−. However, in contrast to (10a),in the cooperative game GC, τA is a function of only thenumber of nodes in its own network, since the coordinationdevice allows networks to access the medium one at a time.Similarly, the optimal strategy τT of the TON is a function ofthe number of nodes in its own network and is independentof the number of nodes in the AON. The threshold value Θthcan either take a value equal to Θth,0 or Θth,1. For instance,when NA = 1, NT = 1 and σS = σC, Θth takes a value equalto Θth,0 = (σS − σI), and the AON chooses τA = 1.
As defined in Section III, for the cooperative game GC, letpI,C be the probability of an idle slot, pS,C be the probabilityof a successful transmission in a slot, p(i)
S,C be the probabilityof a successful transmission by node i, p(i)
B,C be the probabilityof a busy slot and pC,C be the probability of collision. We have
pI,C = PR(1− τA)NA + (1− PR)(1− τT )NT , (14a)
pS,C = PRNAτA(1− τA)(NA−1)
+ (1− PR)NTτT (1− τT )(NT−1), (14b)
p(i)S,C =
{PRτA(1− τA)(NA−1), ∀i ∈ NA,
(1− PR)τT (1− τT )(NT−1), ∀i ∈ NT,(14c)
p(i)B,C =
(1− PR)NTτT (1− τT )(NT−1)
+ PR(NA − 1)τA(1− τA)(NA−1), ∀i ∈ NA,
(1− PR)(NT − 1)τT (1− τT )(NT−1)
+ PRNAτA(1− τA)(NA−1), ∀i ∈ NT,(14d)
pC,C = 1− pS,C − pI,C. (14e)
By substituting (14a)-(14e) in (3) and (6), we can obtain thestage utility of the TON and the AON, defined in (8) and (9),respectively, when networks cooperate. The resulting stageutilities of the TON and the AON are
uTC(τA, τT ) = Γ(τA, τT ), (15)
uAC(τA, τT ) = −∆(τA, τT ). (16)
The networks would like to maximize their payoffs.
B. Cooperating vs. competing in a stage
We consider when both networks find cooperation to be ben-eficial over competition in a stage game. That is uT
C(τA, τT ) ≥
uTNC
(τ∗A, τ∗T) and uA
C(τA, τT ) ≥ uA
NC(τ∗A, τ
∗T). Using these
inequalities, we determine the range of PR, given in (17), overwhich networks prefer cooperation in the stage game.
Consider when NA = 1 and NT = 1. The range of PRin (17) depends on the length σC of the collision slot. Asdiscussed earlier in Section IV, when networks compete andσS ≥ σC, τ∗A = τ∗T = 1, whereas, when σS < σC, τ∗A = 0 andτ∗T = 1. In contrast, when NA = 1 and NT = 1, irrespectiveof the length of collision slot σC, when networks cooperate,

9
0 50 100 150 2000
0.05
0.1
0.15
0.2
0.25
n (stage)
τ k
AON TON
(a)
0 50 100 150 2000
0.05
0.1
0.15
0.2
0.25
n (stage)
τ k
AON TON
(b)
0 50 100 150 2000
0.05
0.1
0.15
0.2
0.25
n (stage)
τ k
AON TON
(c)
Fig. 9: Illustration of per stage access probability τk (k ∈ {A,T}) of the AON and the TON, as a function of the stage,obtained from an independent run when (a) σC = 0.1σS, (b) σC = σS, and (c) σC = 2σS. The results correspond to NA =5,NT = 5, σS = 1 + β, σI = β, β = 0.01 and PR = 0.5.
τA = 1 and τT = 1. As a result, cooperation is beneficial forPR ∈ [0, 1] when σS ≥ σC, and only beneficial at PR = 0 whenσS < σC. This is because when σS ≥ σC, while networkssee a collision when they compete, they see a successfultransmission if they choose to cooperate. In contrast, whenσS < σC, since the AON chooses not to access the mediumwhen networks compete, the TON gets a contention freeaccess to the medium and hence always sees a successfultransmission. As a result, the TON suffers from cooperationunless the AON doesn’t get a chance to access the medium,which is when PR = 0. Note that while the analysis forNA = 1 and NT = 1 as discussed above, is simple, (17)becomes intractable for NA > 1 and NT > 1. Hence, weresort to computational analysis and show that as the numberof nodes increases, when σS ≤ σC, cooperation is beneficialonly at PR = 0, whereas, when σS > σC, it is beneficial onlyfor higher values of PR, i.e., for PR close to 1. We discuss thisin detail in Section VII.
C. Repeated game with cooperating networks
We define an infinitely repeated game G∞C
given the co-ordination device PR. The course of action that the networksfollow is as follows: Players in the beginning of stage n receivea recommendation Rn ∈ {H,T} from the coordination devicePR and, following on the recommendation, the players eitheraccess (A) the shared spectrum or backoff (B). We define thestrategy profile of players in stage n as
an =
{(A,B) if Rn = H,(B,A) if Rn = T.
(18)
We have player k’s average discounted payoff for the gameG∞C
, where k ∈ N is
UkC = Eφ
{(1− α)
∞∑
n=1
αn−1ukC(φ)
}, (19)
where the expectation is taken with respect to the strategyprofile φ, uk
C(φ) is player k’s payoff in stage n and 0 < α < 1
is the discount factor. By substituting (15) and (16) in (19),we can obtain the average discounted payoffs UT
Cand UA
C, of
the TON and the AON, respectively.Figure 9 shows the access probabilities of TON and AON
for the repeated game G∞C
when (a) σS > σC (Figure 9a), and(b) when σS ≤ σC (Figure 9b corresponds to σS = σC andFigure 9c corresponds to σS < σC) . The results correspondto AON-TON coexistence with NA = NT = 5 and PR = 0.5.
In contrast to the repeated game in Section IV-C wherenodes in the AON choose to occassionally access the mediumaggressively when σS > σC, in the repeated game G∞
C, nodes
in the AON as shown in Figure 9, irrespective of the lengthof collision slot, never access the medium aggressively, i.e.,do not choose τA = 1, instead they occasionally refrain fromtransmission and choose τA = 0 during a stage. This is dueto the absence of contention from the TON when networksobey the recommendation of the coordination device. In theabsence of contention from the TON, when nodes in the AONchoose to refrain from transmission, the age of the AON onlyincreases by the length of an idle slot. Since the benefitsof idling surpasses that of contending aggressively, nodes inthe AON occasionally choose to refrain from transmissionirrespective of the relative length of collision slot.
VI. THE COEXISTENCE ETIQUETTE
The networks are selfish players and may find it beneficialto disobey the recommendations of the device. We enforcea coexistence etiquette which ensures that in the long runthe networks either cooperate or compete forever. We havethe networks adopt the grim trigger strategy [5] in casethe other network doesn’t follow the recommendation of thecoordination device in a certain stage of the repeated game.Specifically, if in any stage, a network does not comply withthe recommendation of the coordination device, the networks
∆−p(i)S,NC − (σI − σC)(pI,NC − (1− τT )NT )− (σS − σC)(pS,NC −NT τT (1− τT )NT−1)
∆−τA(1− τA)NA−1 − (σI − σC)((1− τA)NA − (1− τT )NT )− (σS − σC)(NAτA(1− τA)NA−1 −NT τT (1− τT )NT−1)
≤ PR ≤ 1− (1− τ∗A)NA (17)

10
play their respective Nash equilibrium strategies (10) in eachstage that follows.
The penalty of a network not following the coordinationdevice in a stage is to have to compete in every stagethereafter. Thus, we would expect a network to disobey thedevice’s recommendation only if it infact prefers competitionto cooperation. To enable the etiquette, in addition to therecommendation of the device, we assume that the playersat the beginning of any stage n have information about theactions that the players chose in stage (n−1). Since the playersmay disobey the device, the action profile an is not restrictedto that in (18).
Let ψn ∈ {0, 1} be an indicator variable such that ψn = 1 ifthe networks obey the coordination device PR in stage n, andψn = 0 corresponds to them deviating. We set ψn = 1 whenRn = H and action profile an = (A,B) or when Rn = T andaction profile an = (B,A). Else, ψn = 0.
If ψn−1 = 0, networks play their respective Nash strategies(φ∗A, φ
∗T ) in stage n and all stages that follow.
A. Is cooperation self-enforceable?
We check if the cooperation strategy profile defined in (18)is self-enforceable, that is, if the networks always complywith the recommendations of the coordination device. Specif-ically, we check whether the cooperation strategy profile isa subgame-perfect equilibrium (SPE) [5]. That is, whethereither player would benefit from deviating unilaterally from therecommendation of the randomization device at any stage ofthe game. To do so, we use the one-stage deviation principle.
Without loss of generality, consider stage 1. At the be-ginning of the stage the coordination device observes eitherR1 = H or R1 = T. For both, we must consider the twodeviations: (a) the AON adheres to the recommendation but theTON deviates and (b) the TON adheres but the AON deviates.We consider the resulting four possibilities in turn.
1) R1 = H: Suppose the networks follow the recommendedaction profile (A,B) in the stage and beyond. The resultingpayoffs, respectively, of the AON and the TON, conditionedon R1 = H and the action profile in stage 1, are given by
UTC|{H,(A,B)} = (1− α)E
[∞∑n=2
αn−1uTC
], (20a)
UAC|{H,(A,B)} = −(1− α)
(∆−(2) + E
[∞∑n=2
αn−1uAC
]), (20b)
where ∆−(2) = ∆−(1)(1− τA(1− τA)(NA−1)) + σC+
(1− τA)NA(σI − σC) + NAτA(1− τA)(NA−1)(σS − σC).
∆−(2) is the average age at the beginning of stage 2 thatresults from the AON accessing and the TON backing-off inslot 1, for an average age ∆−(1) at the beginning of slot 1.Since the TON backs-off its stage 1 throughput is 0.
In case the AON unilaterally deviates, that is it backs-off,the age increases by the idle slot length. The action profileis (B,B). Given the grim trigger etiquette, stage 2 onwardboth networks play the MSNE. The discounted payoff obtainedby the AON, denoted by UA
NC|{H,(B,B)}, where the bold B
emphasizes the deviation, is given by (21a). On the other hand,if the TON unilaterally deviates, the resulting action profile is(A,A), and the TON gets an average throughput larger than0 in stage 1. Given the grim trigger etiquette, its resultingdiscounted payoff is given by (21b).
UANC|{H,(B,B)} = −(1− α)
((∆−(1) + σI)+
E
[∞∑n=2
αn−1uANC
]), (21a)
UTNC|{H,(A,A)} = (1− α)
(τT (1− τT )(NT−1)(1− τA)NAσSr+
E
[∞∑n=2
αn−1uTNC
]). (21b)
The AON and the TON would want to deviate only iftheir resulting payoffs while competing were larger than whenobeying the device. The equations (22a)-(22b) next capture theconditions under which both networks will always obey thecoordination device.
UAC|{H,(A,B)} ≥ UA
NC|{H,(B,B)}, (22a)
UTC|{H,(A,B)} ≥ UT
NC|{H,(A,A)}. (22b)
2) R1 = T: The coordination device recommends thenetworks to play (B,A). The resulting payoffs, respectively,of the AON and the TON, conditioned on the action profilein stage 1, are given by
UTC|{T,(B,A)} = (1− α)
(τT (1− τT )(NT−1)σSr+
E
[∞∑n=2
αn−1uTC
]), (23a)
UAC|{T,(B,A)} = −(1− α)
(∆−(2) + E
[∞∑n=2
αn−1uAC
]), (23b)
where ∆−(2) = ∆−(1) + σC + (1− τA)NA(σI − σC)
+ NTτT (1− τT )(NT−1)(σS − σC).
Here ∆−(2) is the average age at the beginning of stage 2 thatresults from the AON backing-off and the TON accessing instage 1, for an age ∆−(1) at the beginning of stage 1.
Similarly to the earlier case when R1 = H, we can calculatethe payoffs obtained by the AON and the TON, respectively,when they unilaterally deviate as
UTNC|{T,(B,B)} = (1− α)E
[∞∑n=2
αn−1uTNC
], (24a)
UANC|{T,(A,A)} = −(1− α)
(∆−(2) + E
[∞∑n=2
αn−1uANC
]),
(24b)
where ∆−(2) = ∆−(1)(1− τA(1− τA)(NA−1)(1− τT )NT)
+ σC + (1− τT )NT(1− τA)NA(σI − σC)
+ NAτA(1− τA)NA−1(1− τT )NT
+ NTτT (1− τT )(NT−1)(1− τA)NA(σS − σC).
Here ∆−(2) is the average age at the beginning of stage 2that results from the AON and the TON both accessing in slot1, for an average age ∆−(1) at the beginning of slot 1.
The equations (25a)-(25b) capture the conditions under

11
which both networks will always obey the coordination device.
UAC|{T,(B,A)} ≥ UA
NC|{T,(A,A)}, (25a)
UTC|{T,(B,A)} ≥ UT
NC|{T,(B,B)}. (25b)
We state the requirement for cooperation to be self-enforceable.
Statement 1. Cooperation is self-enforceable if there exists anα < 1 such that for all α > α, there exists 0 < PR < 1 suchthat the repeated game G∞
Chas a subgame perfect equilibrium
(SPE) for the strategy profile in (18).
The set of (α,PR) for which the Statement 1 is true can beobtained using the equilibrium incentive constraints specifiedby (22a)-(22b) and (25a)-(25b). We resort to computationalanalysis. In Section VII we show that the existence of a non-empty set of (α,PR) is dependent on the size of the AON andthe TON.
Proposition 3. Cooperation is self-enforceable (Statement 1)for smaller networks. However, as the networks grow in size,competition becomes more favorable than cooperation, theSPE ceases to exist, and cooperation is not self-enforceable.
VII. EVALUATION METHODOLOGY AND RESULTS
We study two scenarios (a) when σS > σC and (b)when σS ≤ σC. In practice, the idle slot is much smallerthan a collision or a successful transmission slot. We setσI = β << 1. For the shown results, when σS > σC, weset σS = (1 + β) and σC = 0.1(1 + β). When evaluatingσS < σC, we set σS = (1 + β) and σC = 2(1 + β). Lastly, weset σS = σC = (1 + β) when σS = σC. The results presentedlater use β = 0.01. To illustrate the impact of self-contentionand competition, we simulated NA ∈ {1, 2, 5, 10, 50} andNT ∈ {1, 2, 5, 10, 50}. To show when the networks cooperate,we simulated the discount factor α ∈ [0.01, 0.99] and thecoordination device PR ∈ [0.01, 0.99]. We used Monte Carlosimulations to compute the average discounted payoff of theAON and the TON. Averages were calculated over 100, 000independent runs each comprising of 1000 stages. We set therate of transmission r = 1 bit/sec for each node in the WiFinetwork.
We begin by studying the impact of the length of collisionslot σC on the average discounted payoff when (a) networksplay the MSNE in each stage and compete for the medium(payoffs UT,NC and UA,NC), and (b) networks obey therecommendation of the coordination device PR in each stageand hence cooperate, (payoffs UT,C and UA,C). We show thatwhen networks compete, while nodes in the AON occasionallychoose to refrain from transmitting during a stage whenσS ≤ σC, they choose to access the medium aggressively whenσS > σC. Note that the nodes in the TON, however, accessthe shared spectrum independently of the ordering of the σSand σC (see (10b) and (11b)). Such behavior when competingimpacts the desirability of cooperation over competition.
We show the region of cooperation, i.e., the range of αand PR for which the inequalities (22a)-(22b) and (25a)-(25b)are satisfied and the repeated game has a SPE supported with
NT
NA
2 5 10 50
2
5
10
50
fτ∗A=1
0.3
0.35
0.4
0.45
0.5
0.55
(a) Empirical frequency of τ∗A = 1,fτ∗A=1 (σS > σC)
NT
NA
2 5 10 50
2
5
10
50
fτ∗A=0
0.08
0.1
0.12
0.14
0.16
0.18
0.2
(b) Empirical frequency of τ∗A = 0,fτ∗A=0 (σS = σC)
Fig. 10: Empirical frequency of occurrence of τ∗A = 1 (fτ∗A=1)and τ∗A = 0 (fτ∗A=0) for different scenarios computed over 100, 000independent runs with 1000 stages each when networks choose toplay the MSNE in each stage. Figure 10a and Figure 10b correspondto when σS > σC and σS = σC, respectively. The results correspondto σS = 1 + β, σI = β, σC = {0.1σS, σS} and β = 0.01.
the coordination device PR. We discuss why cooperation isn’tenforceable and the SPE ceases to exist in the repeated game,as the number of nodes in the networks increases.
Impact of σC on network payoffs in the repeated gamewith competition: Let fτ∗
A=1 and fτ∗A=0 denote the empirical
frequency of occurrence of τ∗A = 1, τ∗A = 0, respectively.We computed these over the independent runs of the repeatedgame. Figure 10 shows these frequencies for different sizesof the AON and the TON when networks choose to play theMSNE in each stage, for the cases σS > σC and σS = σC. Weskip σS < σC as the observations are similar to σS = σC.
Figure 10a shows how fτ∗A=1 varies as a function of
the number of nodes in the AON and the TON for whenσS > σC. Observe the increase in fτ∗
A=1 as NA increases.This is explained by the resulting increase in the threshold ageNA(σS − σC) (see (10a)). On the other hand, when σS = σC,the AON refrains from transmission more often as the numberof nodes NA in it increases. See Figure 10b that shows theincrease in fτ∗
A=0.The increase in fτ∗
A=1 with NA, when σS > σC, increasesthe fraction of slots occupied by the AON. The resultingincreased competition from the AON for the shared accessadversely impacts the TON. In contrast, the increase in fτ∗
A=0
with NA, when σS ≤ σC, results in larger fraction ofcontention free slots for the TON and works in its favour.The impact of slot sizes on the average discounted payoffof the TON is summarized in Figure 11a, which shows thispayoff for different selections of σC. In accordance with theabove observations, the payoff increases with the length of thecollision slot.
Further note that an increase in fτ∗A=1 with NA should result
in the AON seeing collision slots more often. However, asshown in Figure 11b, despite this fact the average discountedpayoff of the AON is larger when collision slots are smallerthan the successful transmission slots. This is because whenσS > σC and the AON chooses to transmit aggressively leadingto collision, the increase in age due to a collision slot is smallerthan when the AON chooses not to transmit. The latter choicehas the AON see a slot that is either successful (TON transmitssuccessfully), a collision (more than one node in the TONtransmits), or an idle slot, and for a longer σS, can be on anaverage longer than a collision slot.

12
0 0.5 10
0.05
0.1
α
UT,N
C
σC = 0.1σS σC = σS σC = 2σS
(a) TON average discounted payoff
0 0.5 1−20
−15
−10
−5
0
α
UA,N
C
σC = 0.1σS σC = σS σC = 2σS
(b) AON average discounted payoff
Fig. 11: Average discounted payoff of the TON and the AON forNT = NA = 5 when networks choose to play MSNE in each stage.We set σS = 1 + β, σI = β, σC = {0.1σS, σS, 2σS} and β = 0.01.
Impact of σC on network payoffs in the repeated gamewith cooperation: Figure 12 shows the average discountedpayoff of the TON and the AON when networks cooperate.As shown in Figure 12a, the payoff of the TON when networksobey the recommendation of the coordination device PR, is thesame, irrespective of the choice of length of collision slot σC.This is because the optimal strategy of the TON (see (13b))is independent of σC.
Figure 12b shows the payoff of the AON as a function ofPR. The payoff increases with PR. This is expected as a largerPR implies that the AON gets to access the medium in a largerfraction of slots. Also seen in the figure is that a small collisionslot (compare payoffs for σC = 0.1σS and σC = σS) resultsin larger payoffs, especially at smaller values of PR ≤ 0.5.At any given value of PR, an increase in σC for a given σS,increases the average length of slots occupied by the TON andthus the average age. At smaller PR, a larger fraction of slotshave the TON access, which makes the increase in age moresignificant.
Figure 13 shows the gains in payoff on choosing cooperationover competition for the AON and TON. While the TONprefers cooperation to competition for smaller collision slots,the AON prefers cooperation for larger collision slots. As seenin Figure 13a, when σS > σC, for all values of α and PR,the payoff of the TON is higher when networks cooperatethan when they compete. This is because, when σS > σC,nodes in the AON transmit aggressively (see Figure 10) whencompeting, making it less favorable for the TON. On theother hand, for larger collision slots, as seen in Figure 10for σC ≥ σS, the AON often refrains from transmission whencompeting. The resulting increase in slots free of contentionfrom the AON makes competing favorable for the TON.Finally, observe in Figure 13a that the gains from cooperationreduce as PR increases. As the fraction of slots available viathe recommendation device decreases, the TON increasinglyprefers competing over all slots.
Unlike the TON, as shown in Figure 13b, as σC increases,AON prefers cooperation. Also, the desirability of cooperationincreases with PR. As explained earlier, for σC ≥ σS, whencompeting the AON refrains from transmitting in a stage incase the age at the beginning is small enough. Such a slothas the length of one of successful, collision or idle slots, andis determined by the TON. When cooperating such slots arealways of length σI of an idle slot.
Lastly, as shown in Figure 13, the gains from cooperation
0 0.5 10
0.05
0.1
PR
UT,C
σC = 0.1σS, α = 0.1σC = 0.1σS, α = 0.99σC = σS, α = 0.1σC = σS, α = 0.99
(a)
0 0.5 1−80
−60
−40
−20
0
PR
UA,C
σC = 0.1σS, α = 0.1σC = 0.1σS, α = 0.99σC = σS, α = 0.1σC = σS, α = 0.99
(b)
Fig. 12: Average discounted payoff of the TON and the AONfor NT = NA = 5 when networks cooperate and follow therecommendation of the coordination device PR in each stage. Shownfor α = 0.1, α = 0.99, σS = 1 + β, σI = β and β = 0.01.
0 0.5 1−0.1
0
0.1
0.2
PR
UT,C
−U
T,N
C
σC = 0.1σS, α = 0.1σC = 0.1σS, α = 0.99σC = σS, α = 0.1σC = σS, α = 0.99
(a)
0 0.5 1−100
−50
0
50
PR
UA,C
−U
A,N
C
σC = 0.1σS, α = 0.1σC = 0.1σS, α = 0.99σC = σS, α = 0.1σC = σS, α = 0.99
(b)
Fig. 13: Gain of cooperation over competition for the TON andthe AON for NT = NA = 5. The results correspond to α = 0.1,α = 0.99, σS = 1 + β, σI = β, σC = {0.1σS, σS} and β = 0.01.
for both the networks are larger for higher value of α indi-cating that cooperation is more beneficial when the player isfarsighted, i.e., it cares about long run payoff. For instance,as shown in Figure 13a, when σC ≥ σS, cooperation is morebeneficial for the TON when α = 0.99 as compared to whenα = 0.01. Similarly, as shown in Figure 13b, the benefits ofcooperation for the AON increases with increase in α.
When is cooperation self-enforceable? Figures 14 and 15show the values of α and PR for which cooperation is self-enforceable, for when σS = σC and σS > σC, respectively. Weconsider different selections of NA and NT. We are interestedin the values of α and PR that satisfy the inequalities (22a)-(22b) and (25a)-(25b). We observe that the range of α andPR over which cooperation is self-enforceable reduces as thenumbers of nodes in the networks increase. Next we discussthe cases σS ≤ σC and σS > σC in detail.
Case I: When σS ≤ σC: Figures 14a and 14b show the valuesof α and PR for which the TON and the AON, respectively,prefer cooperation to competition. Both networks have twonodes each. The values in Figure 14a are the set of (α,PR) thatsatisfy (22b) and (25b) and those in Figure 14b satisfy (22a)and (25a). As discussed earlier in the context of Figure 13,the AON prefers cooperation when σS ≤ σC while the TONprefers competition. This explains the larger region of (α,PR)in Figure 14b when compared to Figure 14a. Figure 14cshows the values (α,PR) for which both the networks prefercooperation. The resulting region is an intersection of theregions in Figures 14a and 14b. For the values in Figure 14c,all the Equations (22a), (22b), (25a), and (25b) are satisfied.
Similar to the figures described above, Figures 14d, 14e,and 14f show the regions of values, respectively, for whichthe TON prefers cooperation, the AON prefers cooperation,

13
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
PR
α
(a) ND = 2, NW = 2,Region TON prefers co-operation.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
PR
α
(b) ND = 2, NW = 2,Region AON prefers co-operation.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
PR
α
(c) ND = 2, NW =2, Region cooperation isself-enforceable.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
PR
α
(d) ND = 5, NW = 5,Region TON prefers co-operation.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
PR
α
(e) ND = 5, NW = 5,Region AON prefers co-operation.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
PR
α
(f) ND = 5, NW =5, Region cooperation isself-enforceable.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
PR
α
(g) ND = 10, NW =10, Region TON preferscooperation.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
PR
α
(h) ND = 10, NW =10, Region AON preferscooperation.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
PR
α
(i) ND = 10, NW =10, Region cooperationis self-enforceable.
Fig. 14: Range of α and PR for different selections of NA and NT
when σC = σS. The ranges are qualitatively similar for σC > σS.
and both networks prefer cooperation. Each network now hasfive instead of two nodes. The larger number of nodes makescooperation attractive for the AON over a larger range of αand PR (compare Figures 14b and 14e). The range of values,however, shrinks for the TON. This is explained by the factthat as the number of AON nodes increases, as shown inFigure 10b, the frequency of τ∗A = 0 increases, giving the TONgreater contention free access when competing and makingcooperation less favourable. The result is a smaller region ofvalues, shown in Figure 14f, over which cooperation is self-enforceable.
Figures 14g, 14h, and 14i show the regions for when thenetworks have ten nodes each. As is clear, the region corre-sponding to AON further increases, while that correspondingto the TON almost disappears, and so does the region overwhich cooperation is self-enforceable.
Case II: When σS > σC: Figure 15 shows the regionsover which the two networks prefer cooperation and theresulting region of values (α,PR) for which cooperation is self-enforceable. We show the regions for when both the networkshave two and ten nodes each. In contrast to when σS ≤ σC, wesee that the region over which the AON prefers cooperationshrinks. Also the TON prefers cooperation over a range ofvalues, which decreases as the number of nodes increases. Thisis explained by the fact that the AON, as shown in Figure 10a,attempts access with probability 1 with higher frequency asnetworks grow in size, making competition better for the AON.
VIII. CONCLUSION
We formulated a repeated game to model coexistence be-tween an AON and a TON. The AON desires a small age
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
PR
α
(a) ND = 2, NW = 2,Region TON prefers co-operation.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
PR
α
(b) ND = 2, NW = 2,Region AON prefers co-operation.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
PR
α
(c) ND = 2, NW =2, Region cooperation isself-enforceable.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
PR
α
(d) ND = 10, NW =10, Region TON preferscooperation.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
PR
α
(e) ND = 10, NW =10, Region AON preferscooperation.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
PR
α
(f) ND = 10, NW =10, Region cooperationis self-enforceable.
Fig. 15: Range of α and PR for different selections of NA and NT
when σS > σC (σC = 0.1σS).
of updates while the TON desires a large throughput. Thenetworks could either compete, that is play the mixed strategyNash equilibrium in every stage of the repeated game, orcooperate by following recommendations in every stage from arandomized signalling device to access the spectrum in a non-interfering manner. The networks when cooperating employedthe grim trigger strategy, which had both the networks playthe MSNE in all stages following a stage in which a networkdisobeyed the device. This ensured that the networks woulddisobey the device only if they found competing to be morebeneficial than cooperating in the long run.
Having modeled competition and cooperation, together withthe grim trigger strategy, we investigated if cooperation be-tween the networks was self-enforceable. For this we checkedif and when the cooperation strategy profile was a subgameperfect equilibrium. We considered two cases of practicalinterest (a) when σS ≤ σC and (b) when σS > σC. We showedthat while cooperation is self-enforceable when networks havea small number of nodes, networks prefer competing whenthey grow in size.
REFERENCES
[1] I. Bekmezci, O. K. Sahingoz, and S. Temel, “Flying ad-hoc networks(fanets): A survey,” Ad Hoc Networks, vol. 11, no. 3, pp. 1254–1270,2013.
[2] H. Hartenstein and L. Laberteaux, “A tutorial survey on vehicular ad hocnetworks,” IEEE Communications magazine, vol. 46, no. 6, pp. 164–171,2008.
[3] J. Liu, G. Naik, and J.-M. J. Park, “Coexistence of dsrc and wi-fi: Impacton the performance of vehicular safety applications,” in Communications(ICC), 2017 IEEE International Conference on. IEEE, 2017, pp. 1–6.
[4] S. Kaul, R. Yates, and M. Gruteser, “Real-time status: How often shouldone update?” in INFOCOM, 2012 Proceedings IEEE. IEEE, 2012, pp.2731–2735.
[5] G. J. Mailath and L. Samuelson, Repeated games and reputations: long-run relationships. Oxford university press, 2006.
[6] G. Bianchi, “Performance analysis of the ieee 802.11 distributed coor-dination function,” IEEE Journal on selected areas in communications,vol. 18, no. 3, pp. 535–547, 2000.
[7] B. Cheng, H. Lu, A. Rostami, M. Gruteser, and J. B. Kenney, “Impact of5.9 ghz spectrum sharing on dsrc performance,” in Vehicular NetworkingConference (VNC), 2017 IEEE. IEEE, 2017, pp. 215–222.

14
[8] G. Naik, J. Liu, and J.-M. J. Park, “Coexistence of dedicated short rangecommunications (dsrc) and wi-fi: Implications to wi-fi performance,” inProc. IEEE INFOCOM, 2017.
[9] I. Khan and J. Harri, “Can ieee 802.11 p and wi-fi coexist in the 5.9ghz its band?” in A World of Wireless, Mobile and Multimedia Networks(WoWMoM), 2017 IEEE 18th International Symposium on. IEEE, 2017,pp. 1–6.
[10] Y. Jin and G. Kesidis, “Equilibria of a noncooperative game for het-erogeneous users of an aloha network,” IEEE Communications Letters,vol. 6, no. 7, pp. 282–284, 2002.
[11] M. Cagalj, S. Ganeriwal, I. Aad, and J.-P. Hubaux, “On selfish behaviorin csma/ca networks,” in INFOCOM 2005. 24th Annual Joint Conferenceof the IEEE Computer and Communications Societies. ProceedingsIEEE, vol. 4. IEEE, 2005, pp. 2513–2524.
[12] R. T. Ma, V. Misra, and D. Rubenstein, “Modeling and analysis ofgeneralized slotted-aloha mac protocols in cooperative, competitive andadversarial environments,” in 26th IEEE International Conference onDistributed Computing Systems (ICDCS’06). IEEE, 2006, pp. 62–62.
[13] H. Inaltekin and S. B. Wicker, “The analysis of nash equilibria of theone-shot random-access game for wireless networks and the behavior ofselfish nodes,” IEEE/ACM Transactions on Networking (TON), vol. 16,no. 5, pp. 1094–1107, 2008.
[14] L. Chen, S. H. Low, and J. C. Doyle, “Random access game and mediumaccess control design,” IEEE/ACM Transactions on Networking (TON),vol. 18, no. 4, pp. 1303–1316, 2010.
[15] S. Kaul, M. Gruteser, V. Rai, and J. Kenney, “Minimizing age ofinformation in vehicular networks,” in Sensor, Mesh and Ad HocCommunications and Networks (SECON), 2011 8th Annual IEEE Com-munications Society Conference on. IEEE, 2011, pp. 350–358.
[16] Y. Sun, E. Uysal-Biyikoglu, R. D. Yates, C. E. Koksal, and N. B. Shroff,“Update or wait: How to keep your data fresh,” IEEE Transactions onInformation Theory, 2017.
[17] R. D. Yates and S. K. Kaul, “Status updates over unreliable multiac-cess channels,” in Information Theory (ISIT), 2017 IEEE InternationalSymposium on. IEEE, 2017, pp. 331–335.
[18] R. D. Yates, “Lazy is timely: Status updates by an energy harvestingsource,” in Information Theory (ISIT), 2015 IEEE International Sympo-sium on. IEEE, 2015, pp. 3008–3012.
[19] I. Kadota, A. Sinha, and E. Modiano, “Optimizing age of informationin wireless networks with throughput constraints,” in IEEE INFOCOM2018-IEEE Conference on Computer Communications. IEEE, 2018,pp. 1844–1852.
[20] G. D. Nguyen, S. Kompella, C. Kam, J. E. Wieselthier, andA. Ephremides, “Impact of hostile interference on information freshness:A game approach,” in Modeling and Optimization in Mobile, Ad Hoc,and Wireless Networks (WiOpt), 2017 15th International Symposium on.IEEE, 2017, pp. 1–7.
[21] Y. Xiao and Y. Sun, “A dynamic jamming game for real-time statusupdates,” arXiv preprint arXiv:1803.03616, 2018.
[22] S. Gopal and S. K. Kaul, “A game theoretic approach to dsrc and wificoexistence,” in IEEE INFOCOM 2018 - IEEE Conference on ComputerCommunications Workshops (INFOCOM WKSHPS), April 2018, pp.565–570.
[23] S. Gopal, S. K. Kaul, and R. Chaturvedi, “Coexistence of age andthroughput optimizing networks: A game theoretic approach,” in 2019IEEE 30th Annual International Symposium on Personal, Indoor andMobile Radio Communications (PIMRC), Sep. 2019, pp. 1–6.
[24] R. Etkin, A. Parekh, and D. Tse, “Spectrum sharing for unlicensedbands,” IEEE Journal on selected areas in communications, vol. 25,no. 3, 2007.
[25] Y. Wu, B. Wang, K. R. Liu, and T. C. Clancy, “Repeated openspectrum sharing game with cheat-proof strategies,” IEEE Transactionson Wireless Communications, vol. 8, no. 4, pp. 1922–1933, 2009.
[26] B. Singh, K. Koufos, O. Tirkkonen, and R. Berry, “Co-primary inter-operator spectrum sharing over a limited spectrum pool using repeatedgames,” in Communications (ICC), 2015 IEEE International Conferenceon. IEEE, 2015, pp. 1494–1499.
[27] D. P. Bertsekas, R. G. Gallager, and P. Humblet, Data networks.Prentice-hall Englewood Cliffs, NJ, 1987, vol. 2.
[28] Z. Han, D. Niyato, W. Saad, T. Basar, and A. Hjørungnes, GameTheory in Wireless and Communication Networks: Theory, Models, andApplications. Cambridge University Press, 2011.
[29] J. F. Nash et al., “Equilibrium points in n-person games,” Proceedingsof the national academy of sciences, vol. 36, no. 1, pp. 48–49, 1950.
APPENDIX AMIXED STRATEGY NASH EQUILIBRIUM (MSNE)
We define τ∗ = [τ∗A, τ∗T] as the parameter required to
compute the mixed strategy Nash equilibrium of the one-shotgame. We begin by finding the τ∗A of the AON by solving theoptimization problem
OPT I: minimizeτA
uANC
subject to 0 ≤ τA ≤ 1.(26)
where, uANC
is the payoff of the AON defined as
uANC = (1− τA(1− τA)(NA−1)(1− τT)NT)∆−
+ (1− τA)NA(1− τT)NT(σI − σC) + σC
+ (NAτA(1− τA)(NA−1)(1− τT)NT
+ NTτT(1− τT)(NT−1)(1− τA)NA)(σS − σC).
The Lagrangian of the optimization problem (26) is
L(τA, µ) =uANC − µ1τA + µ2(τA − 1).
where µ = [µ1, µ2]T is the Karush-Kuhn-Tucker (KKT)multiplier vector. The first derivative of the objective functionin (26) is
uANC
′ = −∆−(1− τT)NT [(1− τA)(NA−1) − (NA − 1)
τA(1− τA)(NA−2)] + (σS − σC)[(1− τT)NT (NA(1− τA)(NA−1)
−NA(NA − 1)τA(1− τA)(NA−2))−NTτT(1− τT)(NT−1)
(1− τA)NA−1]− (σI − σC)NA(1− τT)NT (1− τA)(NA−1).
The KKT conditions can be written as
uANC − µ1 + µ2 = 0, (27a)
−µ1τA = 0, (27b)µ2(τA − 1) = 0, (27c)
−τA ≤ 0, (27d)τA − 1 ≤ 0, (27e)
µ = [µ1, µ2]T ≥ 0. (27f)
We consider three cases. In case (i), we consider µ1 = µ2 = 0.From the stationarity condition (27a), we get
τA =(1− τT)(∆− −NA(σS − σI)) + NANTτT(σS − σC)(
(1− τT)NA(∆− + (σI − σC)−NA(σS − σC))+ NANTτT(σS − σC)
) .
(28)
In case (ii) we consider µ1 ≥ 0, µ2 = 0. Again, using (27a),we get µ1 = uA
NC
′. From (27f), we have µ1 ≥ 0, therefore,uANC
′ ≥ 0. On solving this inequality on uANC
′ we get, ∆− ≤Θth,0, where Θth,0 = NA(σS − σI)− NANTτT(σS−σC)
(1−τT) .Finally, in case (iii) we consider µ1 = 0, µ2 ≥ 0. On solv-
ing (27a), we get ∆− ≤ Θth,1, where Θth,1 = NA(σS − σC).Therefore, the solution from the KKT condition is (10a).
Under the assumption that length of successful transmissionis equal to the length of collision i.e. σS = σC, (10a) reducesto (11a).
Similarly, we find τ∗T for the TON by solving the optimiza-

15
tion problem
OPT II: minimizeτT
− uTNC
subject to 0 ≤ τT ≤ 1.(29)
where, uTNC
is the payoff of the TON defined as
uTNC = τT(1− τT)(NT−1)(1− τA)NAσS.
The Lagrangian of the optimization problem (29) is
L(τT, µ) =− uTNC − µ1τT + µ2(τT − 1).
where µ = [µ1, µ2]T is the KKT multiplier vector. The firstderivative of uT
NCis
uTNC
′ = (1− τA)NA(1− τT)(NT−1)σS
− (NT − 1)τT(1− τT)(NT−2)(1− τA)NAσS.
The KKT conditions can be written as
−uTNC
′ − µ1 + µ2 = 0, (30a)−µ1τT = 0, (30b)
µ2(τT − 1) = 0, (30c)−τT ≤ 0, (30d)
τT − 1 ≤ 0, (30e)
µ = [µ1, µ2]T ≥ 0. (30f)
We consider the case when µ1 = µ2 = 0. From the (30a), weget uT
NC
′ = 0. On solving the stationarity condition, we get(10b), which is also the solution of the KKT conditions.
APPENDIX BOPTIMAL STRATEGY UNDER COOPERATION
We define τ = [τA, τT ] as the optimal strategy of the one-shot game when networks cooperate. We begin by finding theτA of the AON by solving the optimization problem
OPT I: minimizeτA
uAC
subject to 0 ≤ τA ≤ 1.(31)
where, uAC
is the payoff of AON defined as
uAC = (1− PRτA(1− τA)(NA−1))∆− + σC
+ (PR(1− τA)NA + (1− PR)(1− τT)NT)(σI − σC)
+ ((1− PR)NTτT(1− τT)(NT−1)
+ PRNAτA(1− τA)(NA−1))(σS − σC).
The Lagrangian of the optimization problem (31) is
L(τA, µ) =uAC − µ1τA + µ2(τA − 1).
where µ = [µ1, µ2]T is the Karush-Kuhn-Tucker (KKT)multiplier vector. The first derivative of the objective functionin (31) is
uAC
′ = −PR∆−[(1− τA)(NA−1) − (NA − 1)τA(1− τA)(NA−2)]
+ (σS − σC)PRNA[(1− τA)NA−1 − (NA − 1)τA(1− τA)(NA−2)]
− (σI − σC)PRNA(1− τA)(NA−1).
The KKT conditions can be written as
uAC − µ1 + µ2 = 0, (32a)
−µ1τA = 0, (32b)µ2(τA − 1) = 0, (32c)
−τA ≤ 0, (32d)τA − 1 ≤ 0, (32e)
µ = [µ1, µ2]T ≥ 0. (32f)
We consider three cases. In case (i), we consider µ1 = µ2 = 0.From the stationarity condition (32a), we get
τA =∆− −NA(σS − σI)
NA(∆− + (σI − σC)−NA(σS − σC)). (33)
In case (ii) we consider µ1 ≥ 0, µ2 = 0. Again, using (32a),we get µ1 = uA
C
′. From (32f), we have µ1 ≥ 0, therefore,uAC
′ ≥ 0. On solving this inequality on uAC
′ we get, ∆− ≤Θth,0, where Θth,0 = NA(σS − σI).
Finally, in case (iii) we consider µ1 = 0, µ2 ≥ 0. On solv-ing (32a), we get ∆− ≤ Θth,1, where Θth,1 = NA(σS − σC).
Therefore, the solution from the KKT condition is (13a).Under the assumption that length of successful transmission
is equal to the length of collision i.e. σS = σC, (13a) reducesto
τA =
NA(σI − σS) + ∆−
NA(σI − σC + ∆−)∆− > NA(σS − σI),
0 otherwise .(34)
Similarly, we find τT for the TON by solving the optimizationproblem
OPT II: minimizeτT
− uTC
subject to 0 ≤ τT ≤ 1.(35)
where, uTC
is the payoff of TON defined as
uTC = (1− PR)τT(1− τT)(NT−1)σS.
The Lagrangian of the optimization problem (35) is
L(τT, µ) =− uTC − µ1τT + µ2(τT − 1).
where µ = [µ1, µ2]T is the KKT multiplier vector. The firstderivative of uT
Cis
uTC
′ = (1− PR)σS[(1− τT)(NT−1)
− (NT − 1)τT(1− τT)(NT−2)].
The KKT conditions can be written as
−uTC
′ − µ1 + µ2 = 0, (36a)−µ1τT = 0, (36b)
µ2(τT − 1) = 0, (36c)−τT ≤ 0, (36d)
τT − 1 ≤ 0, (36e)
µ = [µ1, µ2]T ≥ 0. (36f)
We consider the case when µ1 = µ2 = 0. From the (36a),we get uT
C
′ = 0. On solving the stationarity condition, we get(13b), which is also the solution of the KKT conditions.