Embed Size (px)
Citation preview
1
Persistence Acquisition and Maintenance for
Autonomous Formations
Brad C. YUNational ICT Australia Limited
The Australian National University
With Baris Fidan & Brian D.O. Anderson
2
Aim
• To provide basic concepts about rigid formation control
what’s a rigid formation?How to keep it rigid?
• To stimulate the interest of applying graph theory in control
systems modeled by graphs….
3
Outline
• Introduction to Rigid Formation Control• Rigid Persistent (Acquiring Persistence)
• Maintaining Persistent Formation• Conclusion
4
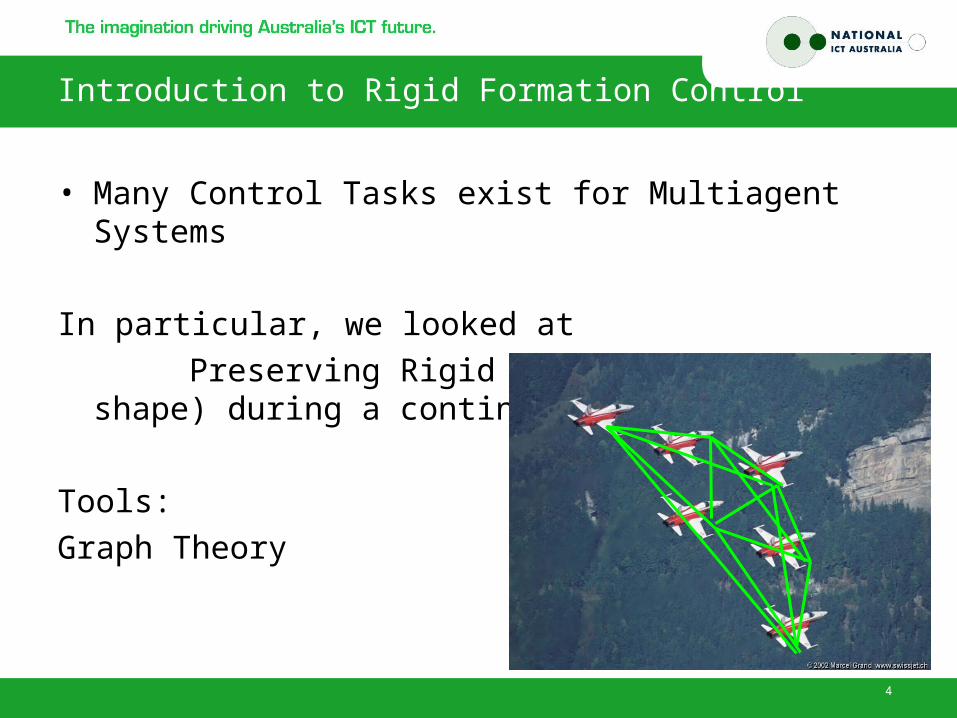
Introduction to Rigid Formation Control
• Many Control Tasks exist for Multiagent Systems
In particular, we looked at Preserving Rigid Formation (the shape)
during a continuous move
Tools:Graph Theory
5
Control Scenarios
• Goal: To maintain a formation shape during a continuous move (i.e. To preserve all the inter-agent distances)
• Method: maintaining certain inter-agent distances
• Distance between agent X and Y may be maintained
– Jointly by X and Y: modelled by undirected graphs, rigid graph theory applicable.
– Unilaterally by X : modelled by directed graphs. Need to validate or modify all rigidity type questions and theories.
Motivated us to develop Persistence Framework
6
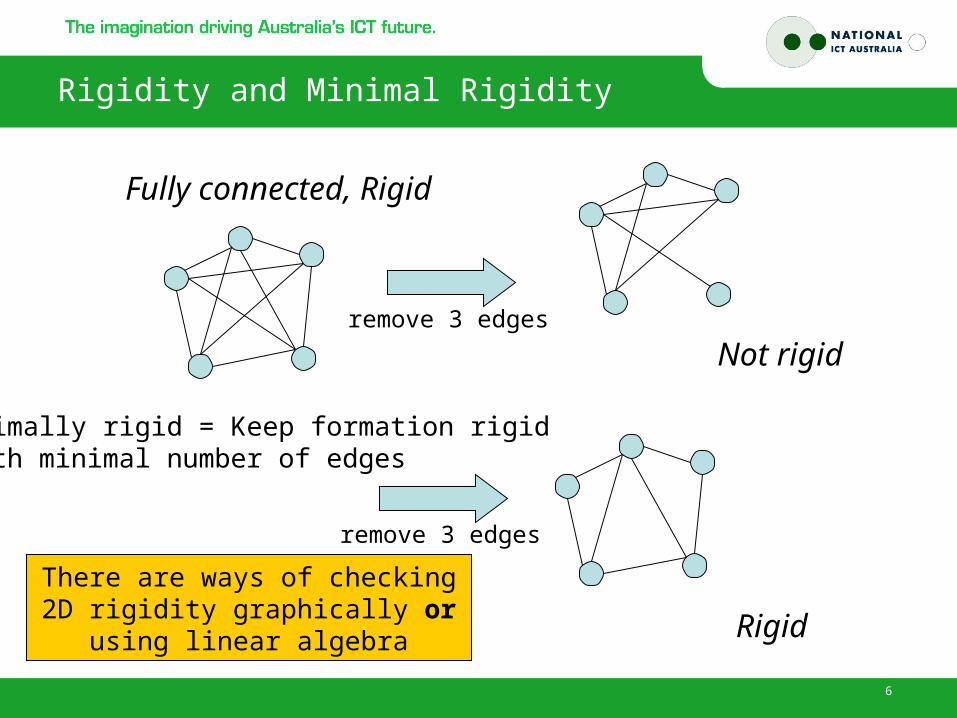
Rigidity and Minimal Rigidity
Fully connected, Rigid
Minimally rigid = Keep formation rigid with minimal number of edges
remove 3 edges
Not rigid
remove 3 edges
Rigid
There are ways of checking 2D rigidity graphically or using linear
algebra
7
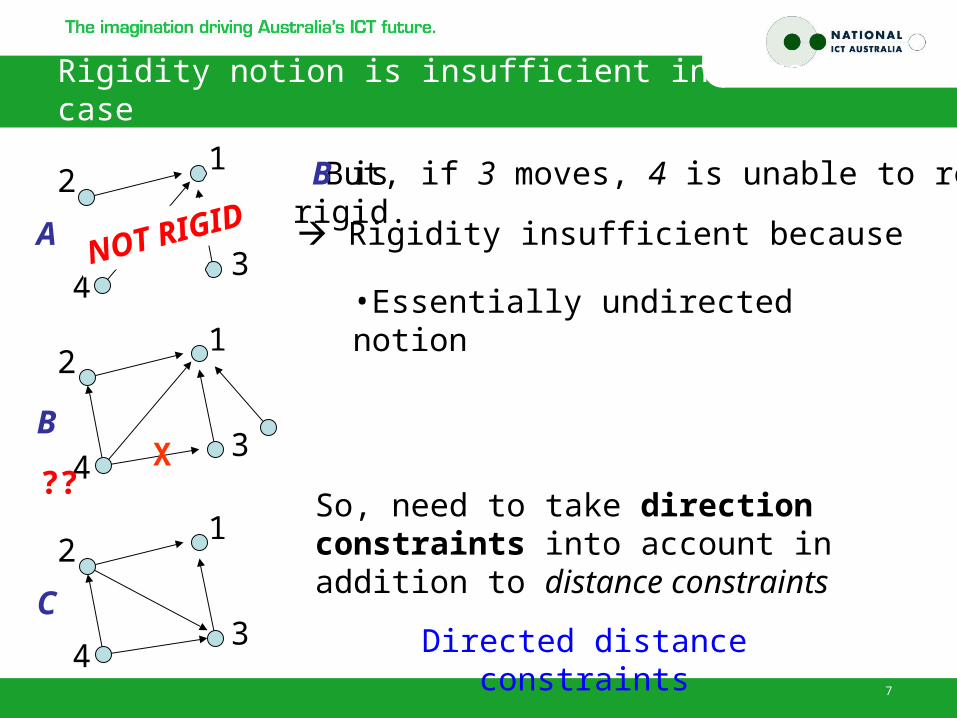
Rigidity notion is insufficient in directed case
1
3
2
4
A
B
C
1
3
2
4
1
3
2
4NOT RIGID
So, need to take direction constraints into account in addition to distance constraints
But, if 3 moves, 4 is unable to react
??
Rigidity insufficient because
•Essentially undirected notion
Directed distance constraints
X
B is rigid.
8
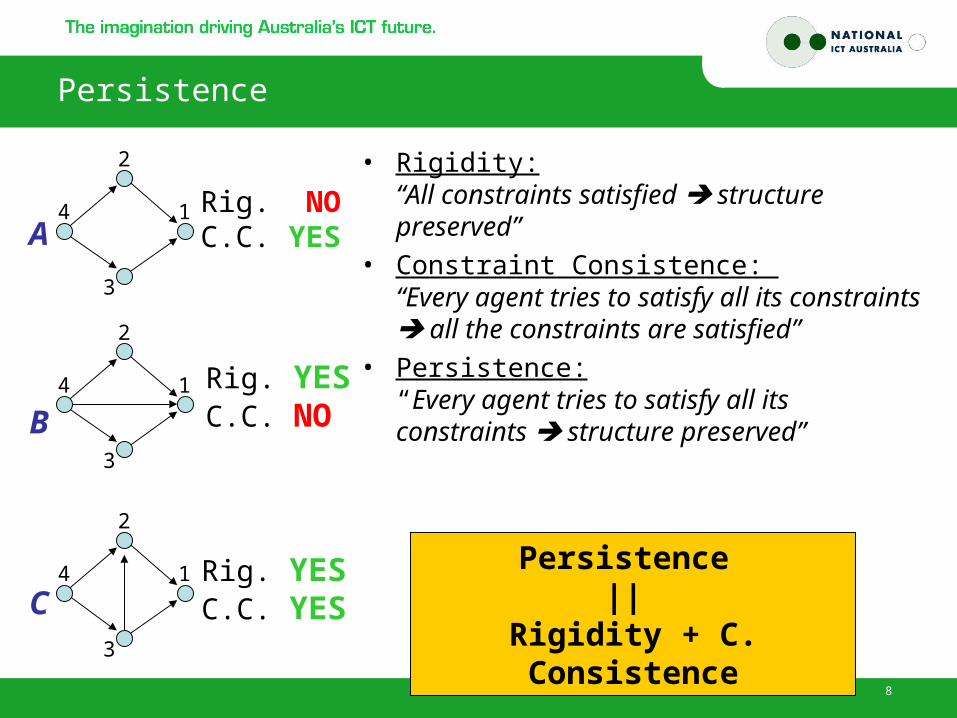
Persistence
• Rigidity: “All constraints satisfied structure preserved”
• Constraint Consistence: “Every agent tries to satisfy all its constraints all the constraints are satisfied”
• Persistence: “Every agent tries to satisfy all its constraints structure preserved”
Persistence ||
Rigidity + C. Consistence
Rig. NO C.C. YES
Rig. YESC.C. NO
Rig. YESC.C. YES
A
B
C
1
3
2
4
1
3
2
4
1
3
2
4
9
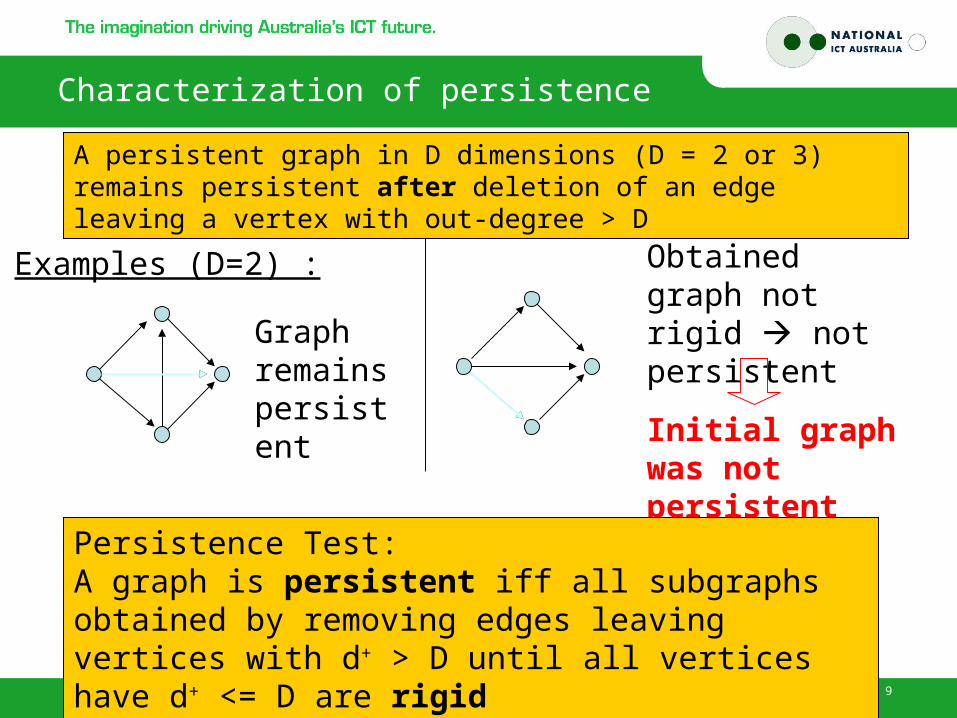
Characterization of persistence
A persistent graph in D dimensions (D = 2 or 3) remains persistent after deletion of an edge leaving a vertex with out-degree > D
Examples (D=2) :
Graph remains persistent
Obtained graph not rigid not persistent
Initial graph was not persistent
Persistence Test: A graph is persistent iff all subgraphs obtained by removing edges leaving vertices with d+ > D until all vertices have d+ <= D are rigid
10
From rigidity to persistence
• Rigid formations Persistent formations
Why?• This exercise reduces control complexity by notably
half.• Simpler communication protocol (one-way sensing)
Question:• What are the rules of assigning directions
(asymmetric control structure) to establish persistence from rigidity?
– No solution for general graphs.– We consider several special classes of graphs
11
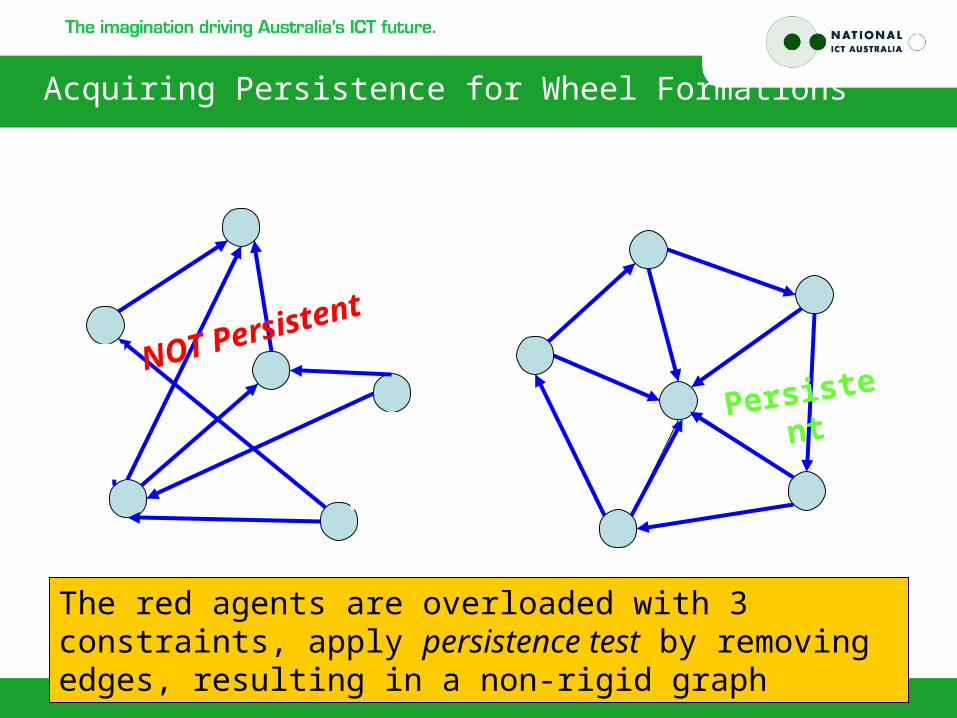
Acquiring Persistence for Wheel Formations
NOT Persistent
Persistent
The red agents are overloaded with 3 constraints, apply persistence test by removing edges, resulting in a non-rigid graph
12
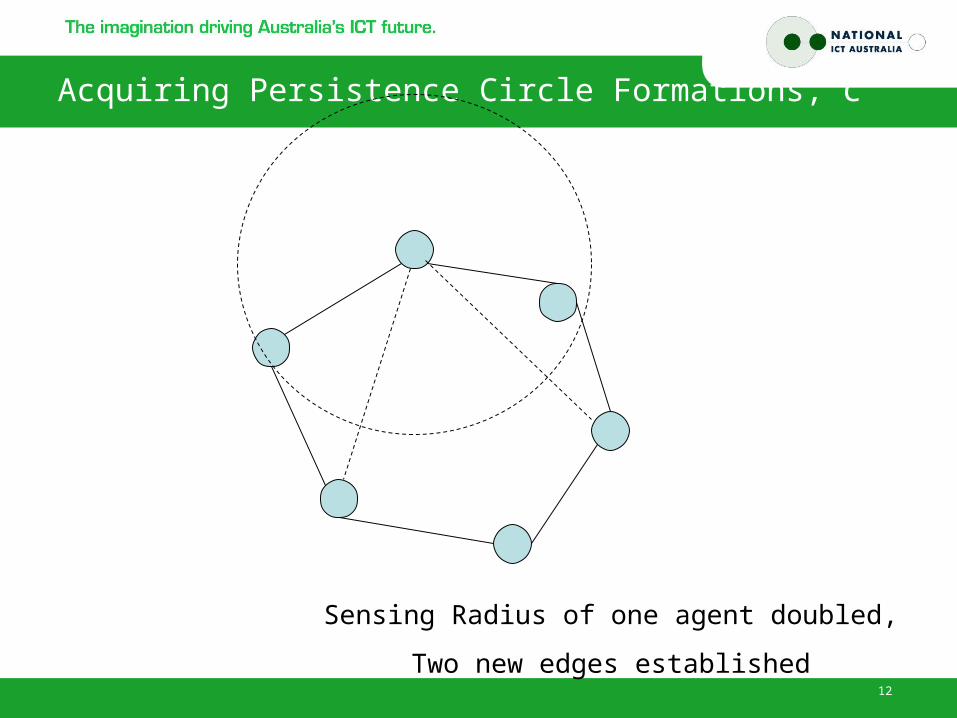
Acquiring Persistence Circle Formations, C
Sensing Radius of one agent doubled,
Two new edges established
13
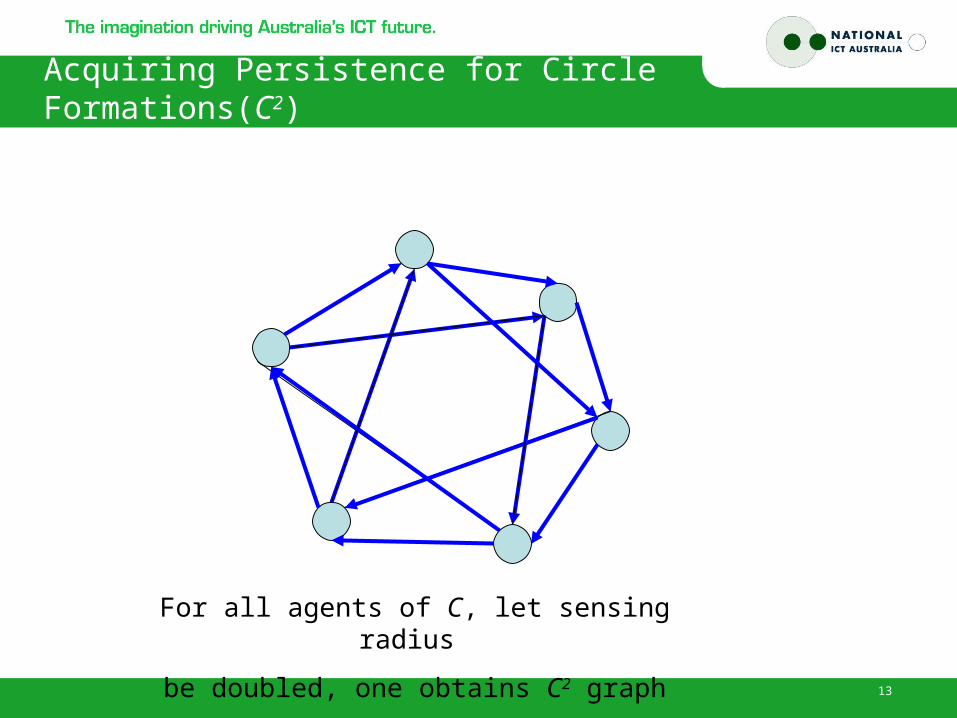
Acquiring Persistence for Circle Formations(C2)
For all agents of C, let sensing radius
be doubled, one obtains C2 graph
14
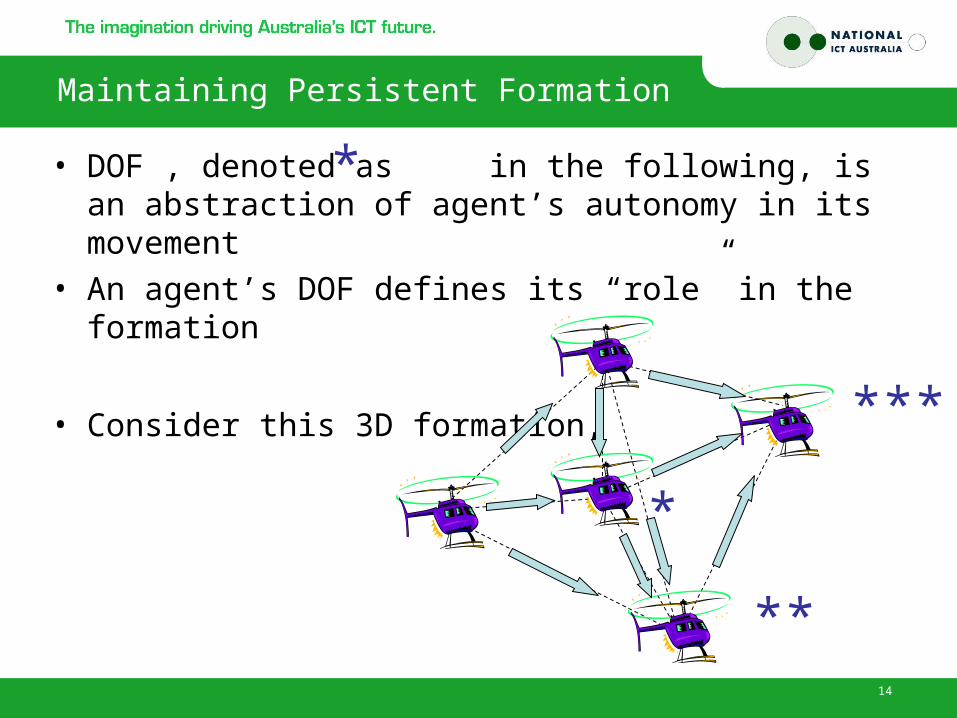
Maintaining Persistent Formation
• DOF , denoted as in the following, is an abstraction of agent’s autonomy in its movement
• An agent’s DOF defines its “role” in the formation
• Consider this 3D formation,
*
***
**
*
15
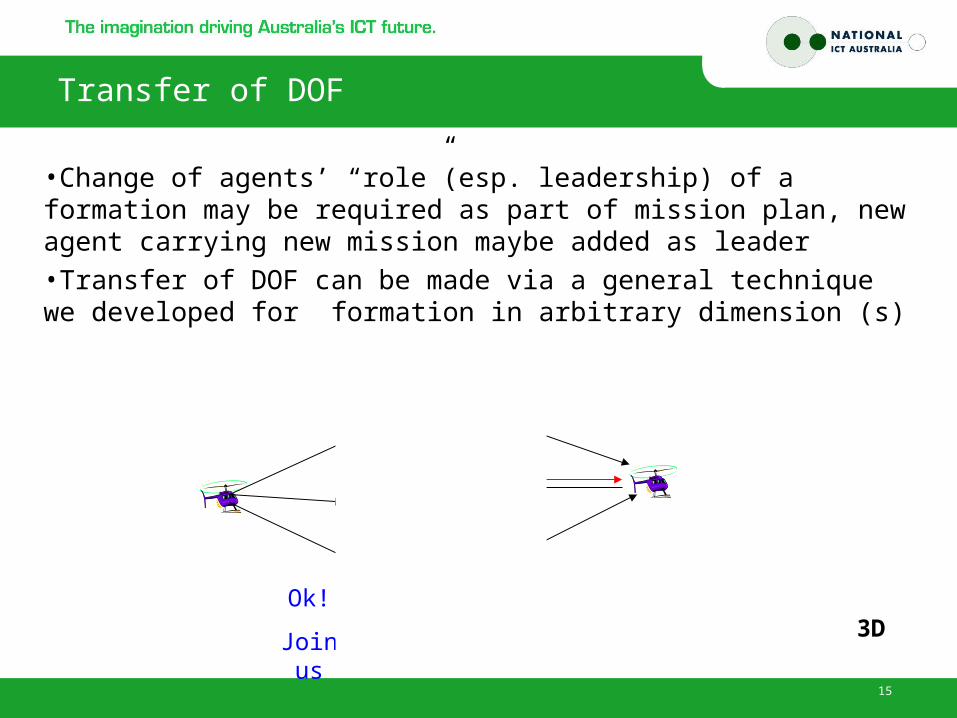
Transfer of DOF
•Change of agents’ “role”(esp. leadership) of a formation may be required as part of mission plan, new agent carrying new mission maybe added as leader
•Transfer of DOF can be made via a general technique we developed for formation in arbitrary dimension (s)
2
3
1
4
5
Ok!
Join us
**
*
*** 3D

16
Future Work
Practical
1> Obtain actual control laws to keep distance effectively constant
2> Relax the (highly) abstracted Point-Agent to one with orientation and/or dimensionality and/or shape
Theoretical
3> Find solutions to direction assignment for general graphs
4> Characterize formation robustness
17
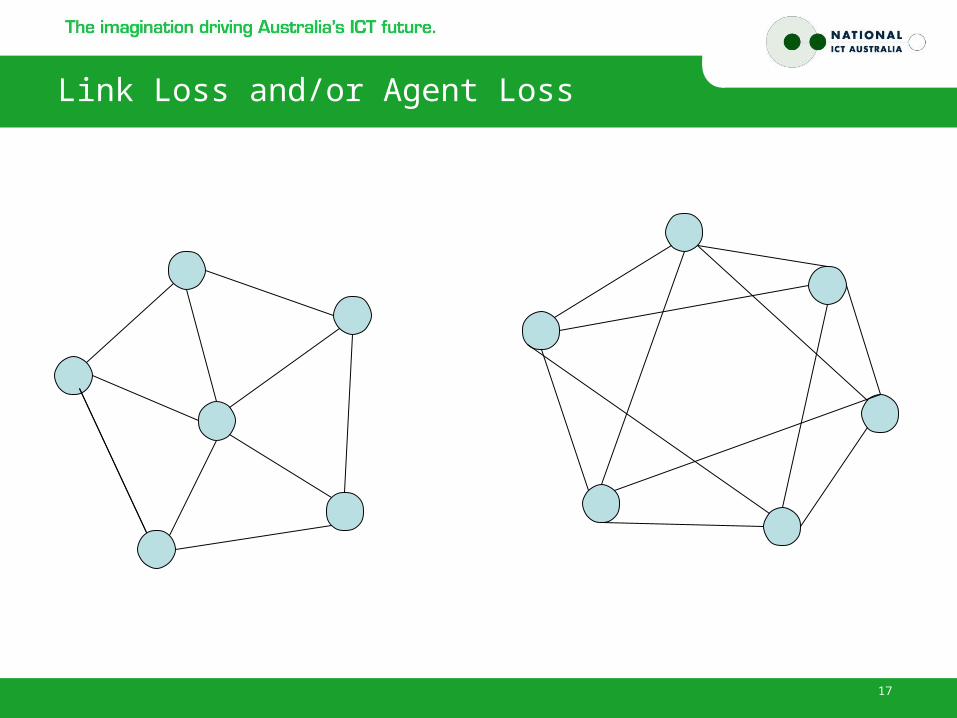
Link Loss and/or Agent Loss
18
• On behalf of co-authors, I would like to acknowledge the contribution of J.M. Hendrickx and V.D. Blondel to the persistent framework.
Thank You
• I would like to thank the ISSNIP2005 committee for the Student Grant.