Embed Size (px)
Citation preview

1
Marc Steinberg
Aerospace Sciences Division (Code 351)
Office of Naval Research
(703) 696-5115, [email protected]
Naval Intelligent Naval Intelligent Autonomy UpdateAutonomy UpdateNaval Intelligent Naval Intelligent
Autonomy UpdateAutonomy Update

2
Intelligent Autonomy VisionIntelligent Autonomy Vision
-Reduce manning requirements (numbers, skills, training) to manage a family of unmanned systems-Support the ability to share assets, collaborate, and get unmanned system services to the tactical edge
-Make unmanned systems as smart as animals in some respects-Operate in challenging weather & exploit environmental conditions -Collaborate in close proximity to others
-Improve robustness & reduce need for substantial human intervention to maintain performance in unplanned or unexpected situations-Develop tools, methodologies, testing approaches to better predict autonomous behavior
-Allow operators to manage heterogeneous unmanned systems at a mission level (individual, team, coalition)-Airspace/Waterspace management to allow for operation in close proximity to manned & other unmanned systems

3
Biologically Inspired Approaches for Biologically Inspired Approaches for Unmanned System Team & Coalition Unmanned System Team & Coalition
Formation – Behavior-Based ApproachFormation – Behavior-Based Approach• New effort started in July• Cataloging, modeling, and analysis of
biological behaviors related to predator-prey relationships among intelligent social animals
• Biologically-inspired heterogeneous cooperation
• Cooperative behaviors in communications degraded environments
• Distributed versus centralized optimization for networked control
• Embedded humans• Experimentation and Validation
•UPenn (Pappas, Kumar, Jadbabaie, Koditschek)•Georgia Tech (Arkin,Balch, Egerstedt)•UC, Berkeley (Tomlin, Hedrick, Sastr•ASU (S. Pratt)•Biological “Think Tank”-UPenn (White)-Univ of Washington (Parrish)-Michigan Tech (Vucetich)-Yale (Skelly)-MIT (Acemoglu)

4
Biologically Inspired Approaches for Biologically Inspired Approaches for Unmanned System Team & Coalition Unmanned System Team & Coalition
Formation – Cognitive-Based ApproachFormation – Cognitive-Based Approach• New effort started in July• Development of dynamic teaming and coalition
forming theories rooted in modular social intelligence exhibited by high-functioning mammals.
– Identification of relevant social intelligence models – Teaming and coalition forming through shared
cognitive abilities – Cognitive Modeling – Coding of relevant teaming parameters, utility
functions, and costs of coalition membership – Satisficing in intractable domains– Human role
• Mathematical modeling in support of satisficing algorithms for dynamic teaming and coalition forming
– Biologically-derived models of individual ACAs– Mathematical models of systems of ACAs and
individual ACA subsystems – Robustness/fault tolerance – Evaluation of information exchange
• Performance Evaluation– Simulation-based evaluation – Physical demonstration
•Dartmouth (Granger, Kralik, Ray, Santos)•MIT (Breazeal)•USC (Sukhatme)

5
Air Volume Capacity and Time-Critical Air Volume Capacity and Time-Critical Coordination of Multiple UAVsCoordination of Multiple UAVs
• New effort with Naval Postgraduate School (Kaminer, Dobrokhodov, Jones) and Univ. of Illinois (Hovakimyan)
• Real-time generation of the multiple collaborative paths that support safe multi-UAS operations in crowded airspaces. – For pre-defined airspace volume and a number of given mission tasks,
determine the appropriate number of UAVs and generate feasible paths for these UAVs that satisfy airspace constraints, guarantee deconfliction and meet the mission requirements both spatially and temporally.
• Development of nonlinear path following control laws that can follow aggressive sensor data collection trajectories despite the use of existing conventional autopilots for the inner loop control.– Greater robustness when following predefined trajectories designed to
put the platform in a position to collect the appropriate sensor data in the presence of environmental disturbances
– Augment an inner-loop autopilot using L1 adaptive control theory.
• Flight Testing at Camp Roberts

6
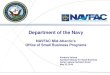
Automated Sensing – Planning & Automated Sensing – Planning & ManagementManagement
• U.C., Berkeley• Collaborative sensing
language and distributed control algorithms to support tasking of unmanned air systems based on high-level commands
• Collaborative sensing language for tasking vehicles based on a petrii net-like approach
• Completed multi-UAV Flight Test– Cooperative search and
localization – System tasked remotely through
a web-based interface UAV 2UAV 1
CollaborationLayer Cooperative
planning
Task Execution
Layer
task 0
CollaborationLayer
Task Execution
Layer
task 0

7
Collaborative & Shared Control of Collaborative & Shared Control of Unmanned Systems Unmanned Systems
• Beginning Phase II SBIR, Phase II STTR, & Transition program for prior STTR Phase II
• Autonomy & Human Interface technology to support small teams of co-located and distributed users in managing larger number of unmanned systems & sharing unmanned systems resources– Autonomy, decision aids, and situation
awareness tools to support collaborative decision-making among teams of operators and unmanned systems
– Distributed control & optimization algorithms to share services with users in small units.
– Trend & Configural Displays to simplify human interaction for small unit users
Performers under different efforts– Charles River Analytics/MIT
(Dr. Missy Cummings)– Perceptronics/CRA/USC (Dr.
Milind Tambe)/MIT (Dr. Missy Cummings)
– Aurora/MIT (Dr. Jon How, Dr. Missy Cummings)

8
Affect-Based Control & Human-Directed Affect-Based Control & Human-Directed Learning of Unmanned Systems Learning of Unmanned Systems
• Beginning Phase II SBIR & Phase II STTR
• Enable human operators to provide direction to unmanned air systems to change behaviors and support adapting or learning new tactical behaviors of interest– Control approaches that draw on
biologically-based theories of cognition, personality, and affect as an initial inspiration, but then develop them within a more conventional engineering framework
– Dynamically modify autonomous behavior in future unmanned systems in a manner which is easily understandable and controllable by human operators and users
• Learning approaches that support human-direction
Performers under different efforts– Chi Systems/USC (Dr. Lynn
Miller & Stephen Reed)– Aptima/CERI(Dr. Nancy
Cooke)

9
Human-Robotic Interaction Human-Robotic Interaction
• Flexible, robust & scalable human-robot teams in dynamic and uncertain environments– Integration of cognitive models,
action schemas and statistical estimation.
– Integration of behavior models and distributed control.
• Assigning tasks with different, potentially incompatible goals & enabling UVs to execute them
• Robust NLP under time pressure• Learning by instruction during task
execution – learn new skills and solve problems on the fly during task execution
Performers under 2 efforts– MIT (Cynthia Breazeal, Deb Roy, Nick Roy,
John How) , Vanderbilt (Julie Adams), UMASS (Rod Grupen) Univ. Washington (Dieter Fox), Stanford (Pam Hinds)
– Indiana (Matthias Scheutz), Notre Dame (Kathleen Eberhard), Stanford (Stanley Peters), ASU (Chitta Baral, Subbarao Kambhampati, Mike McBeath, Pat Langley)
Peer-to-Peer Human-Robot Team
RemoteCommander

10
Other New Efforts for FY09Other New Efforts for FY09
• Multiple ONR autonomy-related FY09 Multidisciplinary University Research Topic– Highly Decentralized Autonomous Systems for
Force Protection and Damage Control– Bio-inspired Autonomous Agile Sensing and
Exploitation of Regions of Interest within Wide Complex Scenes
– Computational Intelligence for Decentralized Teams of Autonomous Agents
– Machine Intelligence and Adaptive Classification for Autonomous Systems