Embed Size (px)
Citation preview
1
Integration of Background Modeling and Object Tracking
Yu-Ting Chen, Chu-Song Chen, Yi-Ping Hung
IEEE ICME, 2006
2
Outline
Introduction General BG Modeling Description Variable Threshold Selection Experiment results Conclusion
3
Introduction (1/4) Background modeling:
Important for many applications: Visual surveillance. Human gesture analysis.
Moving object detection: BG and FG classification.
Method: Mixture of Gaussian distribution (in this
paper) Pixel-wise. Appropriate to dynamic BG.
4
Introduction (2/4)
Object tracking: Appearance model:
Color histogram is used (in this paper). Measure the similarity of the target
object and candidates. Search algorithm:
Find the most likely state of tracked object via similarity measurement.
Particle filtering is used (in this paper).
5
Introduction (3/4) The key to classify FG and BG:
Threshold: T In previous research:
a static T was applied However, T should be adapted
according to: Color distance between BG and object:
Large => loose T Small => strict T
6
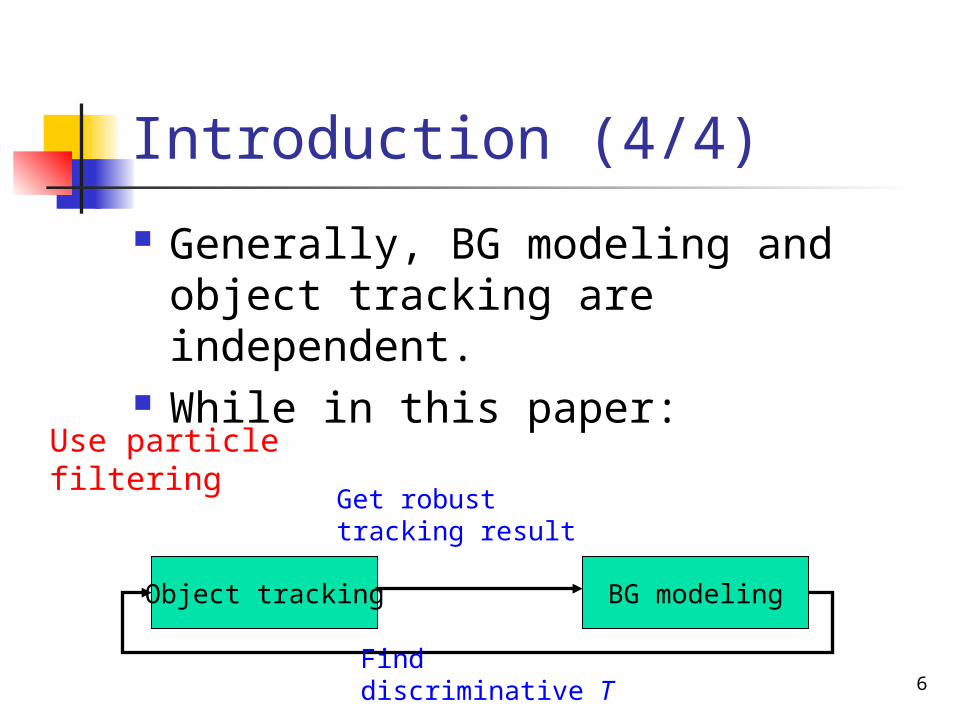
Introduction (4/4)
Generally, BG modeling and object tracking are independent.
While in this paper:
Object tracking BG modeling
Find discriminative T
Get robust tracking result
Use particle filtering
7
Outline
Introduction General BG Modeling Description Variable Threshold Selection Experiment results Conclusion
8
Background Modeling (1/3)
Pixel-based approach: {F, M(t ), Φ, Γ} F
Extracted feature for a pixel. E.g. gray/color value
M(t ) Maintained BG model. M(t ) = {MS
(t ) , MP(t )}
S : stable P : potential
9
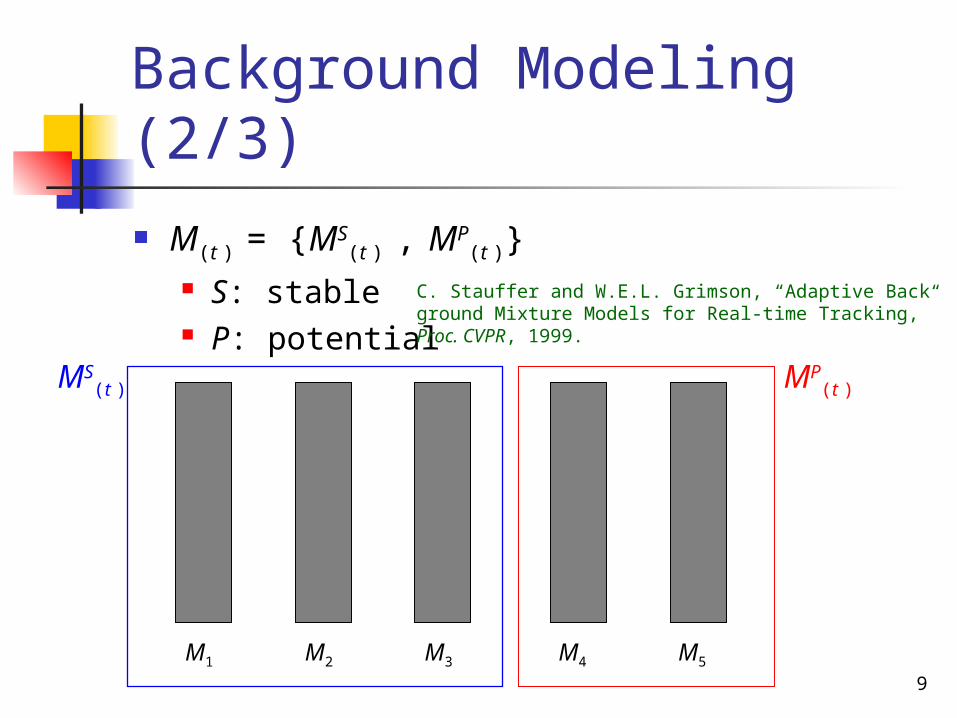
Background Modeling (2/3)
M(t ) = {MS(t ) , MP
(t )} S: stable P: potential
M1 M2 M3 M4 M5
MS(t ) MP
(t )
C. Stauffer and W.E.L. Grimson, “Adaptive Background Mixture Models for Real-time Tracking,” Proc. CVPR, 1999.
10
Background Modeling (3/3)
Φ A function to judge whether a pixel is BG. {1,0} ← Φ[ F(q ), MS
(t ) , T ] Output: BG (1) , FG (0)
Γ A function to update M M(t+1) ← Γ[ F(q ), M(t ), T ] M(t+1) = {MS
(t+1) , MP(t+1)}
11
Goal
To avoid two situations False positive (strict T ) False negative (loose T )
Particle filtering is used To choose a suitable T, according to trackin
g result.
12
Outline
Introduction General BG Modeling Description Variable Threshold Selection Experiment results Conclusion
13
Color histogram of object
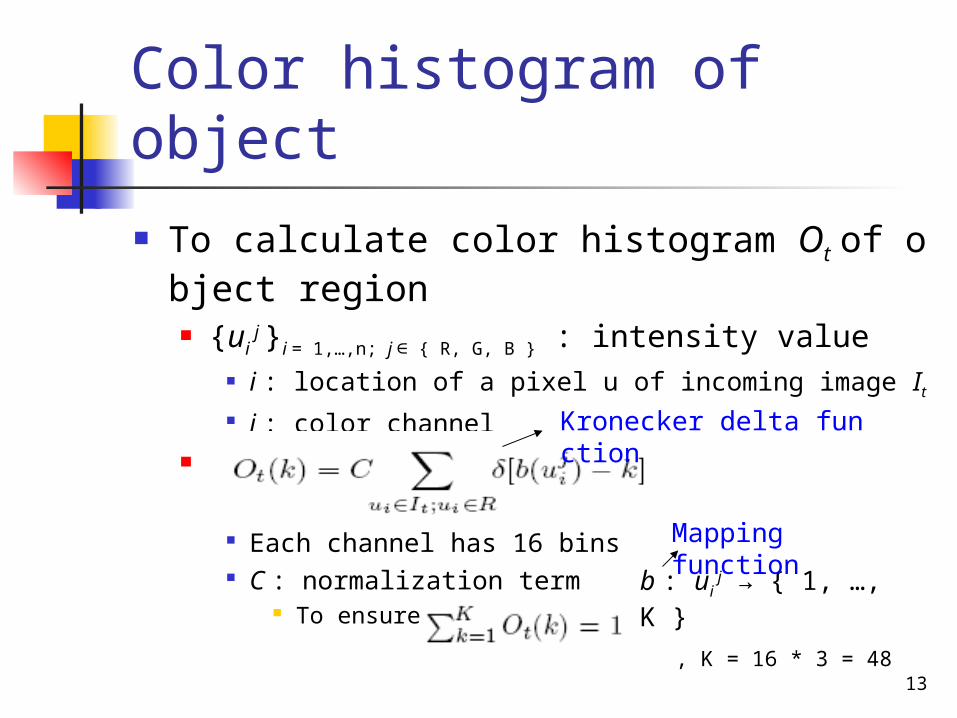
To calculate color histogram Ot of object region {ui
j }i = 1,…,n; j ∈ { R, G, B } : intensity value i : location of a pixel u of incoming image It j : color channel
Each channel has 16 bins C : normalization term
To ensure:
Kronecker delta function
b : ui j → { 1, …, K }
, K = 16 * 3 = 48
Mapping function
14
Particle Filtering (1/3)
Particle Filtering: Kalman Filter
an efficient recursive filter that estimates the state of a dynamic system from a series of incomplete and noisy measurements.
An example application: Providing continuously-updated information about the
position and velocity of an object given only a sequence of observations about its position, each of which includes some error. It is used in a wide range of engineering applications from radar to computer vision.
based on linear dynamical systems discretised in the time domain.
being modelled on a Markov chain built on linear operators perturbed by Gaussian noise.
15
Particle Filtering (2/3)
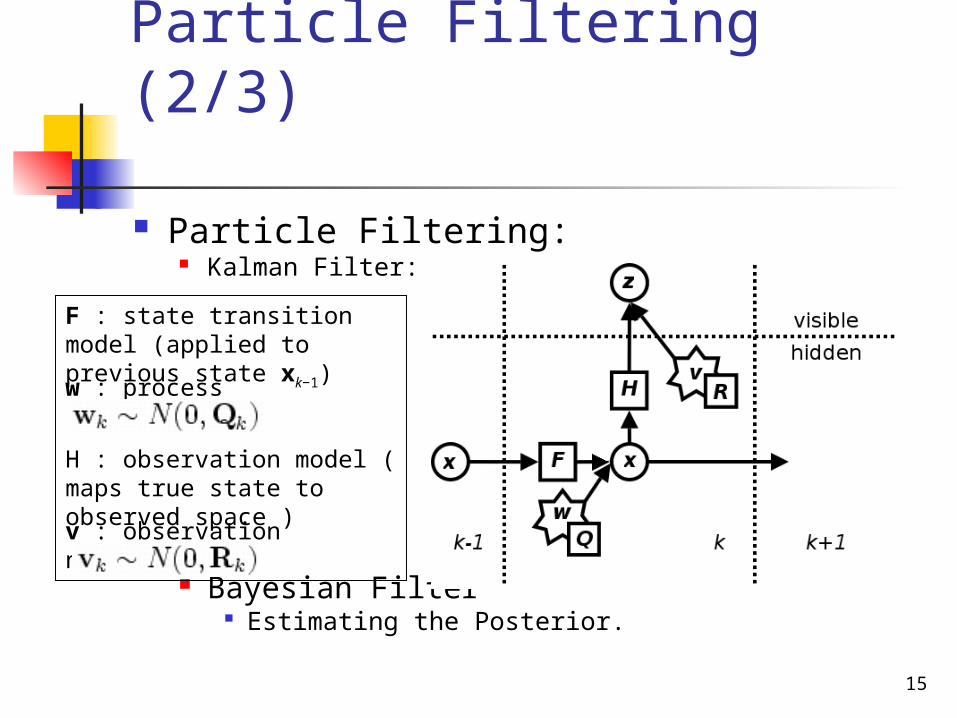
Particle Filtering: Kalman Filter:
Bayesian Filter Estimating the Posterior.
F : state transition model (applied to previous state xk−1)w : process noise
H : observation model ( maps true state to observed space )v : observation noise
16
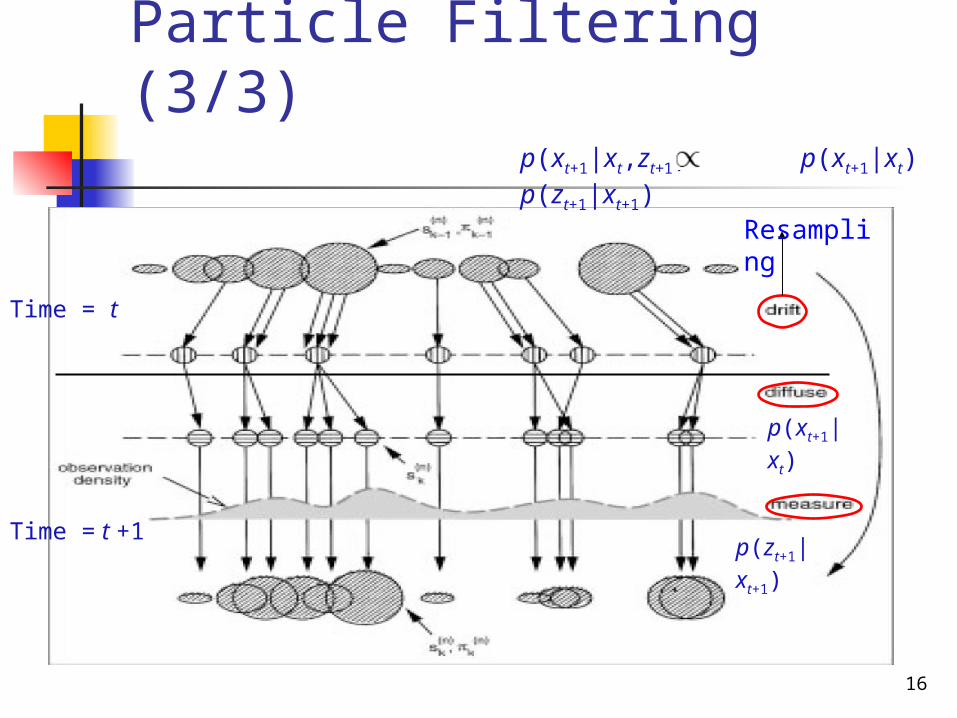
Particle Filtering (3/3)
Resampling
Time = t
Time = t +1
p(xt+1|xt)
p(zt+1|xt+1)
p(xt+1|xt,zt+1) p(xt+1|xt) p(zt+1|xt+1)
17
Dynamic model
Posterior p(xt+1|xt , zt+1) is inferred by a set of N particles St = {st
(n), πt(n)}
St : value of state xt
πt : corresponding sampling probability Brownian motion is used as dynamic mo
del st+1
(n) = s’t(n) + vt
vt ~ Ν(0, Σ)
18
Observation model (1/4)
for Variable threshold selection. Four color histograms are constructe
d: Ot : tracked object at time t Reft
BG : BG region of reference BG image It+1
FG : FG region of incoming image It+1
It+1BG : BG region of incoming image It+1
FGBG
It+1
19
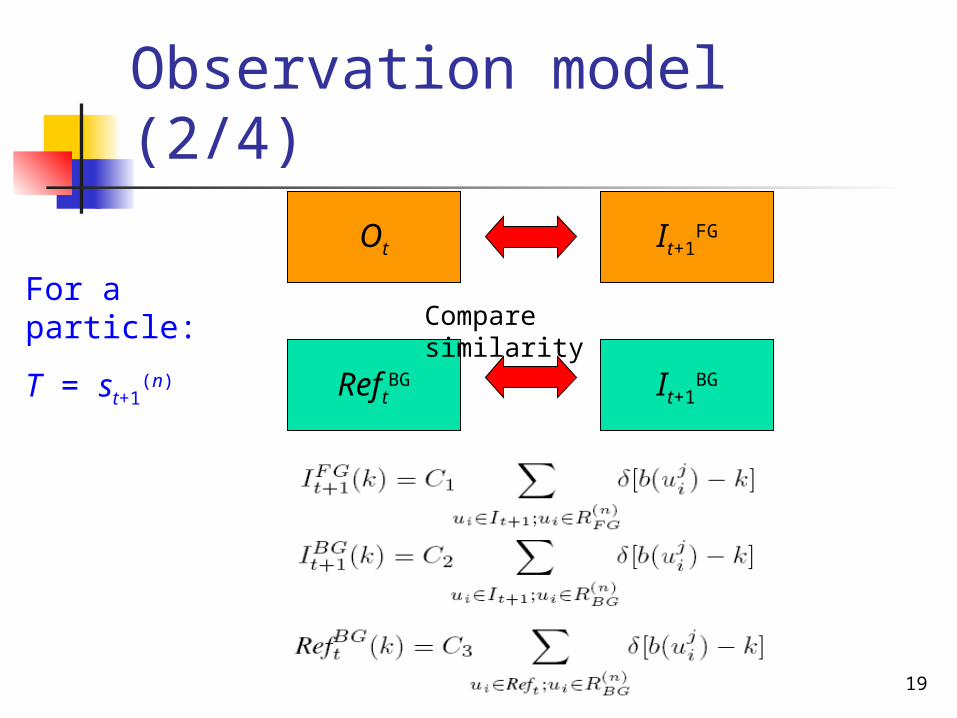
Observation model (2/4)
ReftBG It+1
BG
It+1FGOt
For a particle:
T = st+1(n)
Compare similarity
20
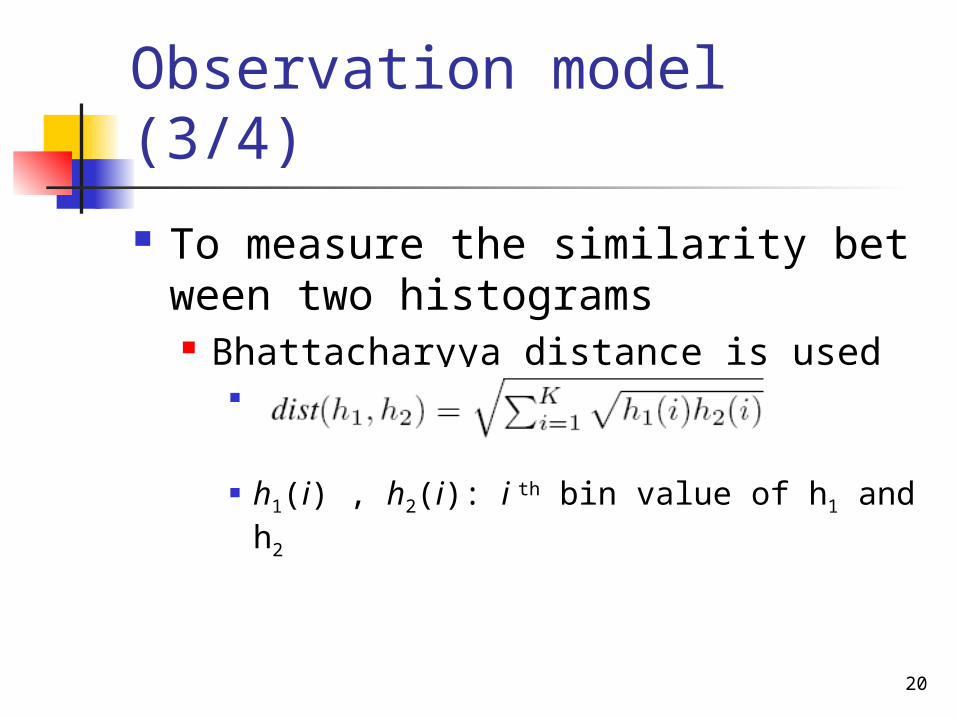
Observation model (3/4)
To measure the similarity between two histograms Bhattacharyya distance is used
h1(i) , h2(i): i th bin value of h1 and h2
21
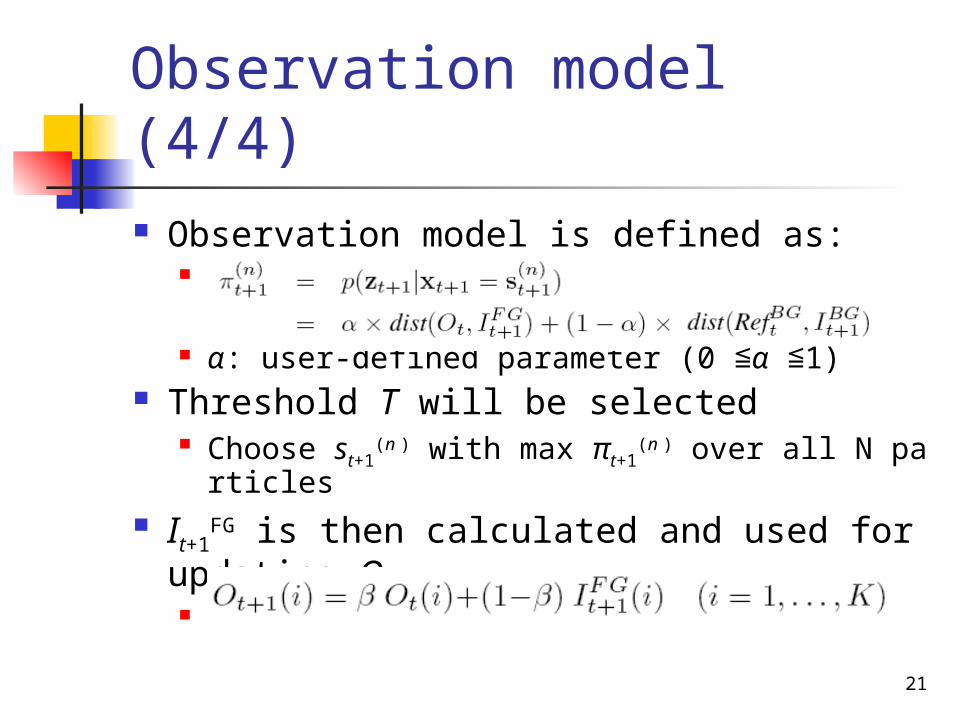
Observation model (4/4) Observation model is defined as:
α: user-defined parameter (0 ≦α ≦1) Threshold T will be selected
Choose st+1(n ) with max πt+1
(n ) over all N particles It+1
FG is then calculated and used for updating Ot
22
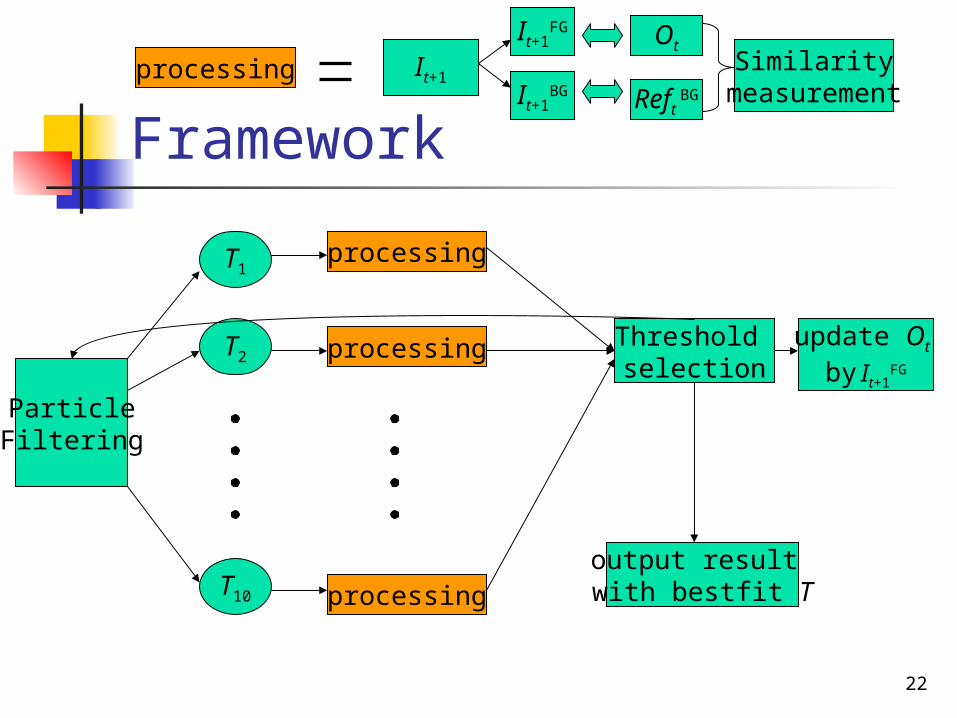
Framework
ParticleFiltering
T1
T2
T10
It+1
It+1FG
It+1BG
Ot
Reft BG
Similaritymeasurement
processing
processing
processing
Threshold selection
update Ot
by It+1FG
processing
output result with bestfit T
23
Outline
Introduction General BG Modeling Description Variable Threshold Selection Experiment results Conclusion
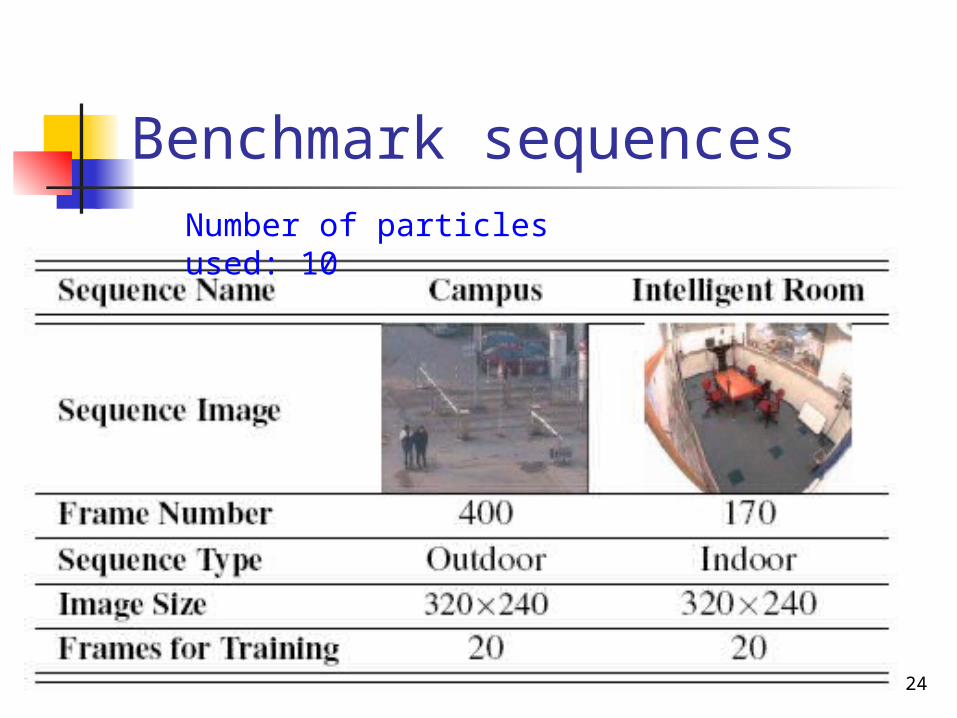
24
Benchmark sequencesNumber of particles used: 10
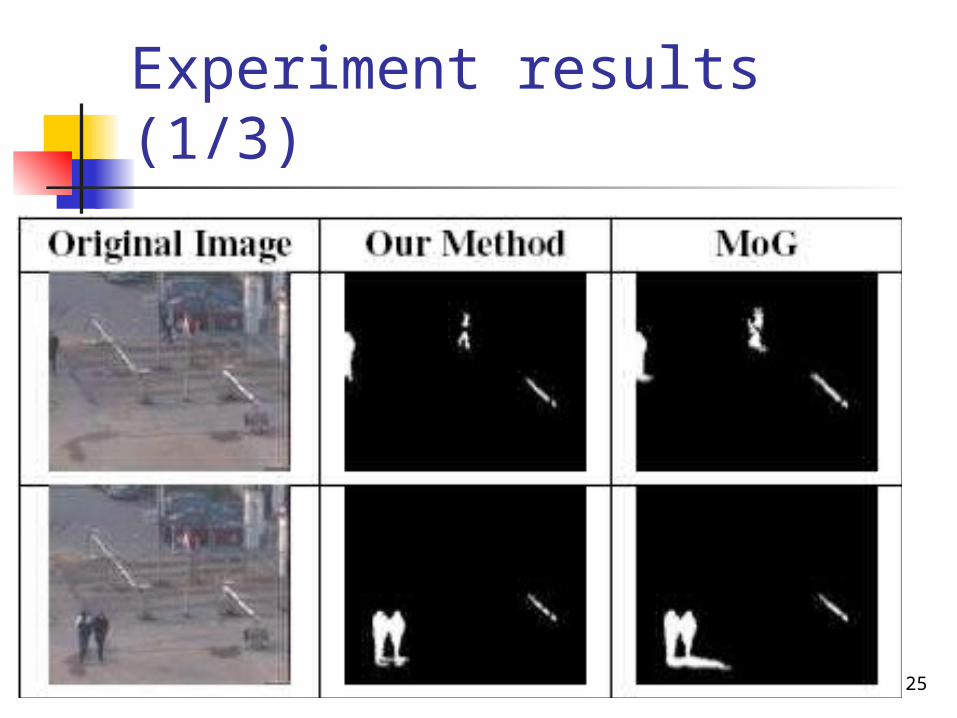
25
Experiment results (1/3)
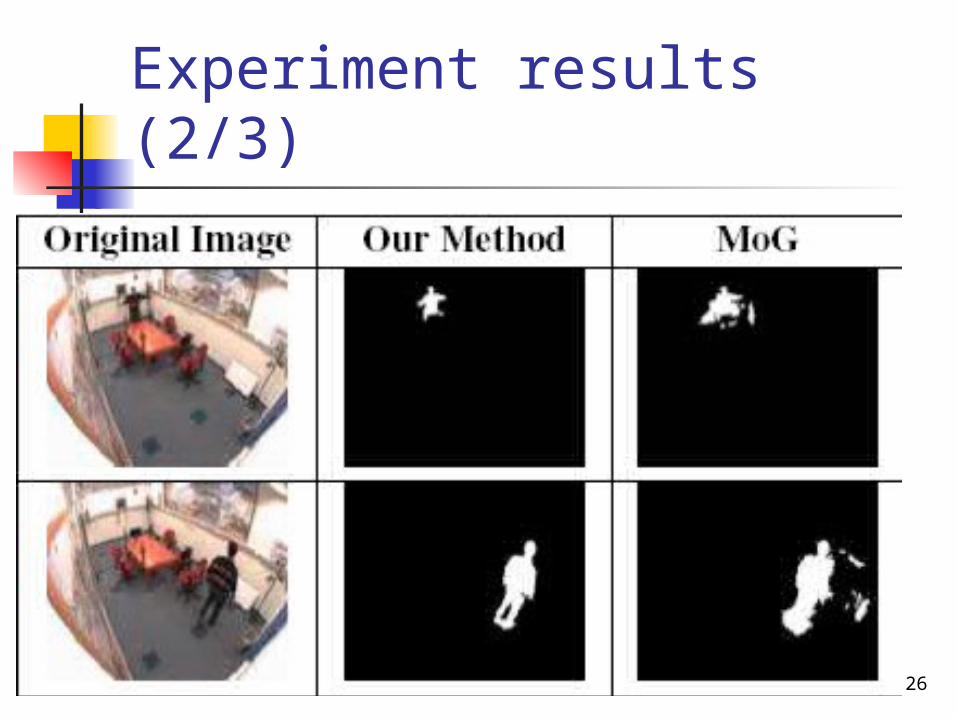
26
Experiment results (2/3)
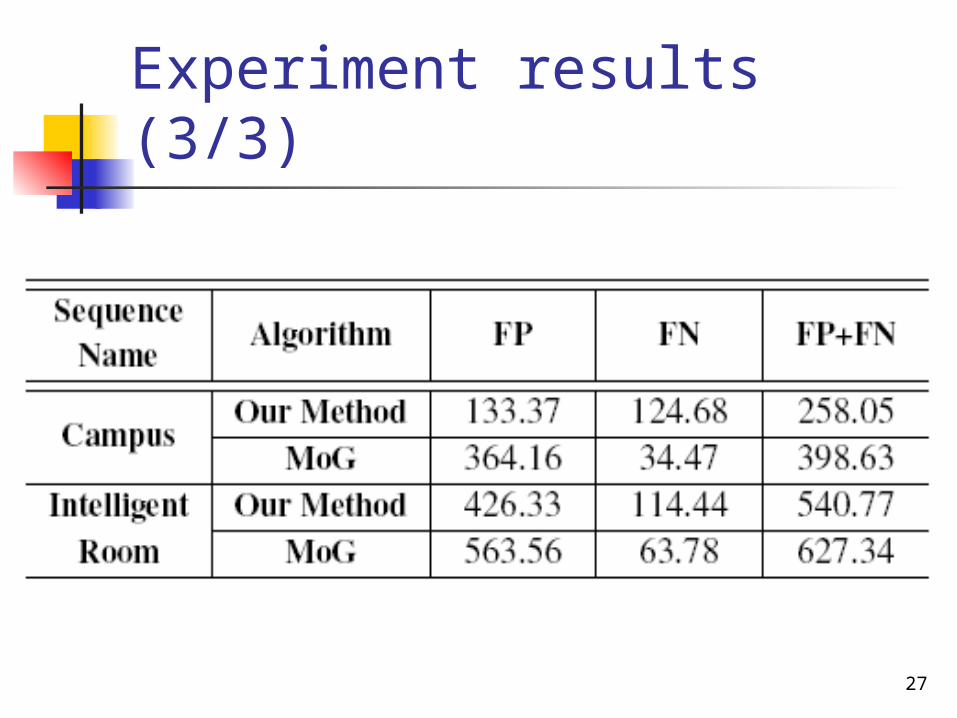
27
Experiment results (3/3)
28
Outline
Introduction General BG Modeling Description Variable Threshold Selection Experiment results Conclusion
29
Conclusion A method for integrating BG modeling
and Object tracking is presented. Color histogram:
Used as appearance model for tracking. Particle Filtering:
Used to get discriminative T according to tracking result.
Experiment results: Show that performance can be improved.
30
Thank you Thanks for your listening.


















![Catalog Icme Ecab[1]](https://img.pdfslide.us/doc/110x75/544c3a1caf7959a4438b59fd/catalog-icme-ecab1.jpg)