Embed Size (px)
Citation preview

1
Game PhysicsGame Physics
22
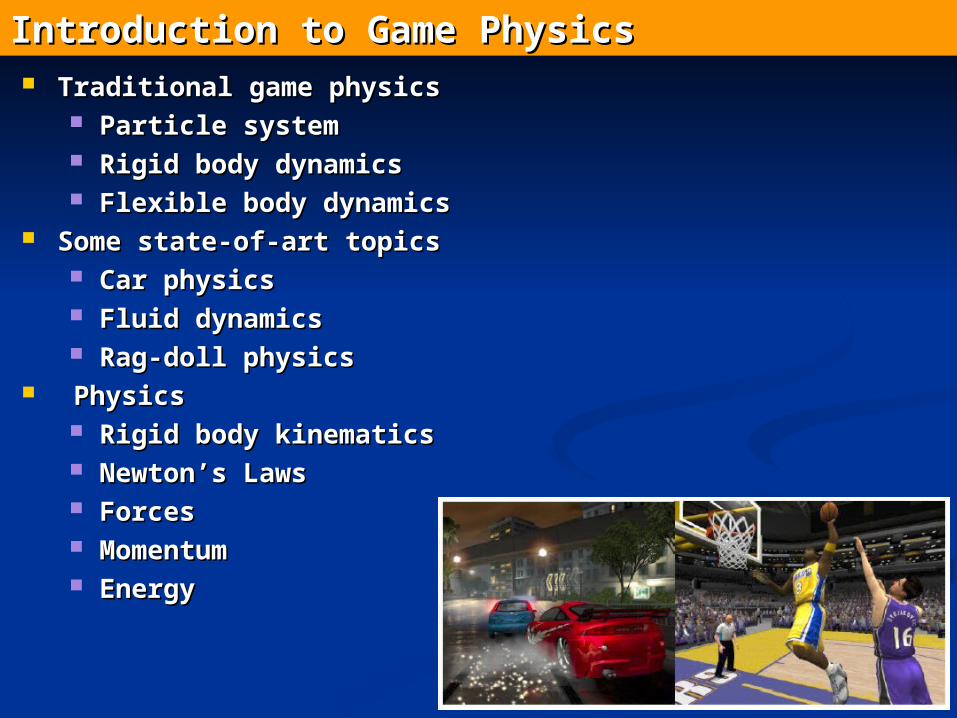
Introduction to Game PhysicsIntroduction to Game Physics Traditional game physicsTraditional game physics
Particle systemParticle system Rigid body dynamicsRigid body dynamics Flexible body dynamicsFlexible body dynamics
Some state-of-art topicsSome state-of-art topics Car physicsCar physics Fluid dynamicsFluid dynamics Rag-doll physicsRag-doll physics
PhysicsPhysics Rigid body kinematicsRigid body kinematics Newton’s LawsNewton’s Laws ForcesForces MomentumMomentum EnergyEnergy
33
Game Physics Applications in Games (1/2)Game Physics Applications in Games (1/2) In generalIn general
Particle system for combat effectsParticle system for combat effects First-person shootingFirst-person shooting
Rag-doll systemRag-doll system Physical character motion simulationPhysical character motion simulation
Rigid-body dynamicsRigid-body dynamics Fracture mechanicsFracture mechanics
SportsSports Rag-doll systemRag-doll system
Physical character motion simulation Physical character motion simulation Fluid dynamicsFluid dynamics
Car racingCar racing Car physicsCar physics Rigid-body dynamicsRigid-body dynamics Fracture mechanicsFracture mechanics
44
Game Physics Applications in Games (2/2)Game Physics Applications in Games (2/2) FightingFighting
Flexible-body dynamicsFlexible-body dynamics Cloth simulationCloth simulation
Rag-dollRag-doll EtcEtc
55
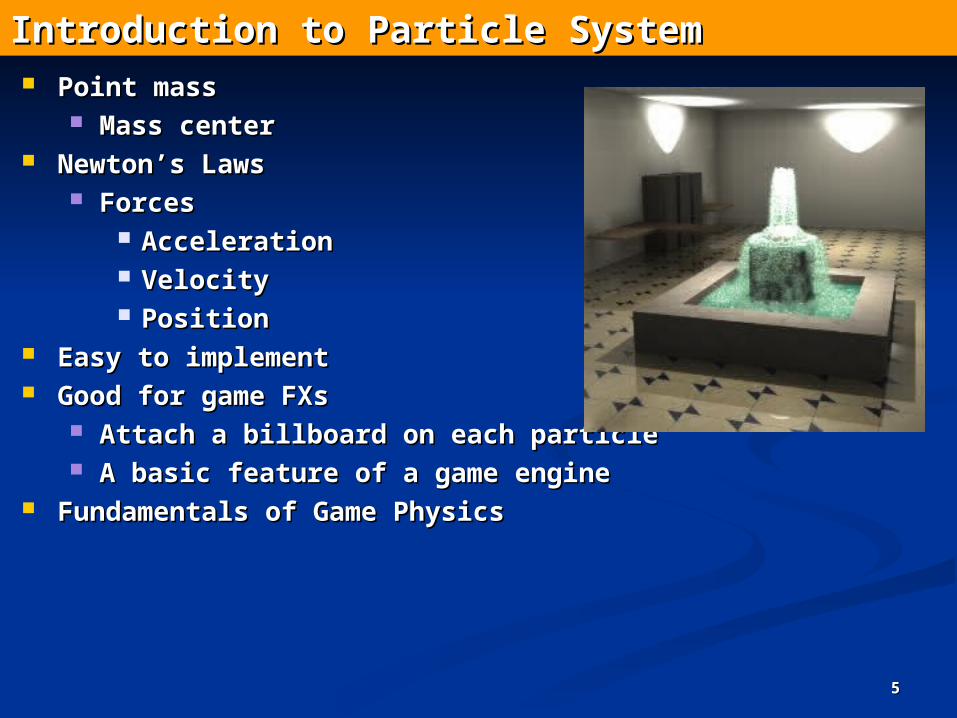
Introduction to Particle SystemIntroduction to Particle System Point massPoint mass
Mass centerMass center Newton’s LawsNewton’s Laws
ForcesForces AccelerationAcceleration VelocityVelocity PositionPosition
Easy to implementEasy to implement Good for game FXsGood for game FXs
Attach a billboard on each particleAttach a billboard on each particle A basic feature of a game engineA basic feature of a game engine
Fundamentals of Game PhysicsFundamentals of Game Physics
66
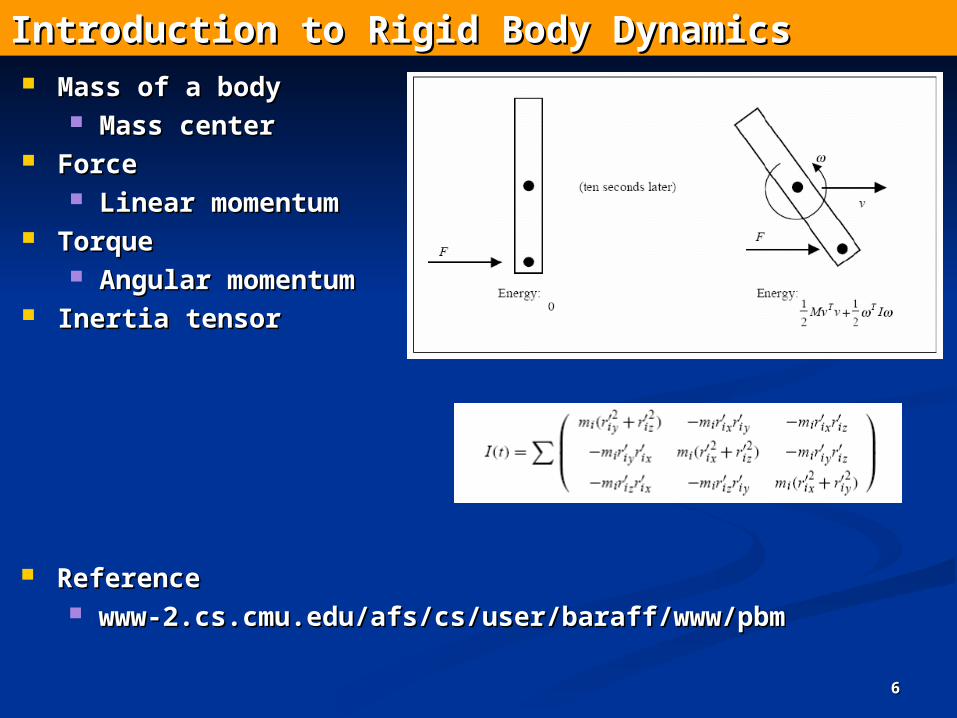
Introduction to Rigid Body DynamicsIntroduction to Rigid Body Dynamics Mass of a bodyMass of a body
Mass centerMass center ForceForce
Linear momentumLinear momentum TorqueTorque
Angular momentumAngular momentum Inertia tensorInertia tensor
ReferenceReference www-2.cs.cmu.edu/afs/cs/user/baraff/www/pbmwww-2.cs.cmu.edu/afs/cs/user/baraff/www/pbm
77
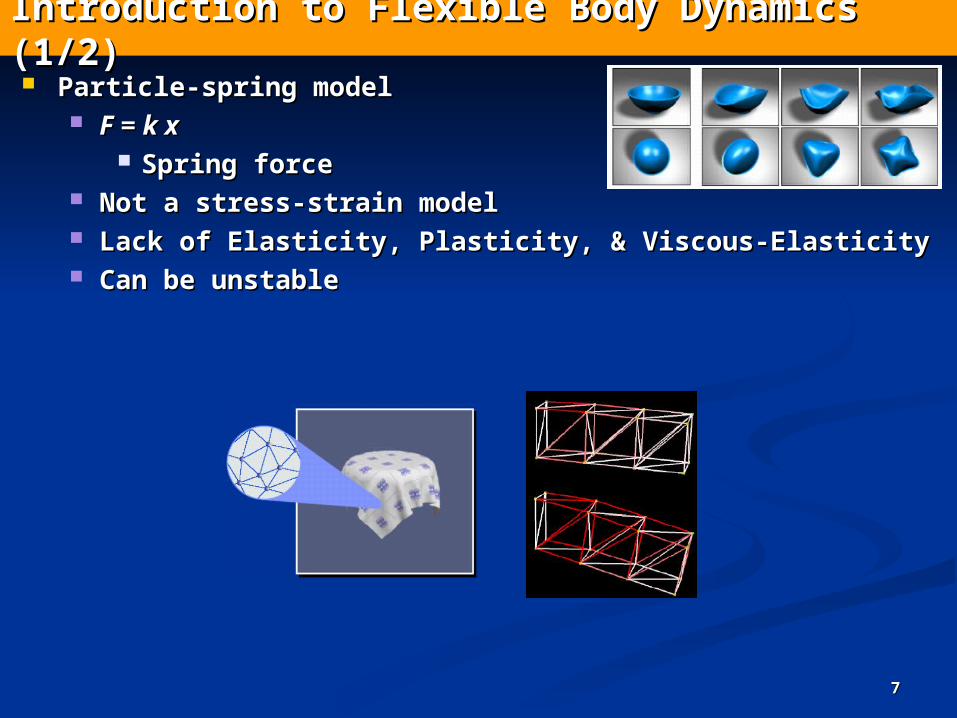
Introduction to Flexible Body Dynamics (1/2)Introduction to Flexible Body Dynamics (1/2) Particle-spring modelParticle-spring model
F = k xF = k x Spring forceSpring force
Not a stress-strain modelNot a stress-strain model Lack of Elasticity, Plasticity, & Viscous-ElasticityLack of Elasticity, Plasticity, & Viscous-Elasticity Can be unstableCan be unstable
8
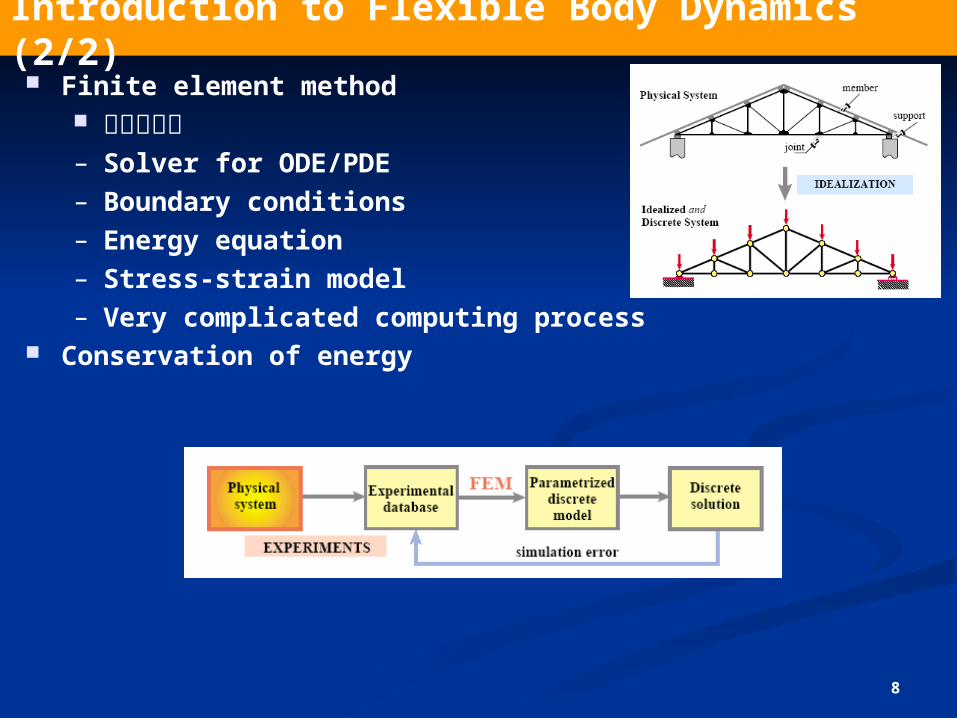
Introduction to Flexible Body Dynamics (2/2) Finite element method
有限元素法– Solver for ODE/PDE– Boundary conditions– Energy equation– Stress-strain model– Very complicated computing process
Conservation of energy
99
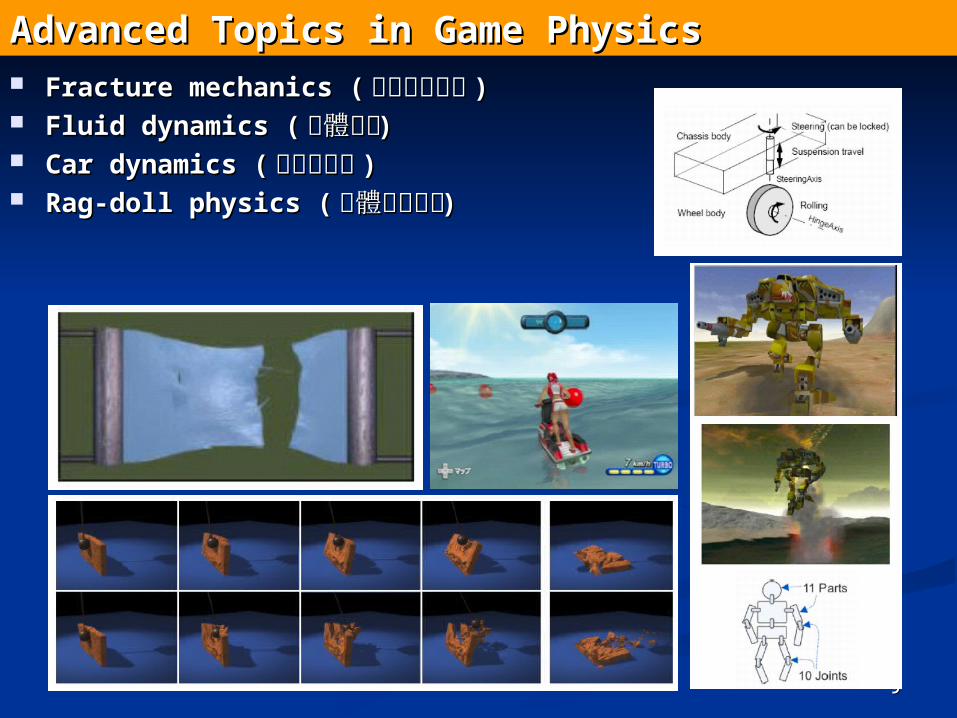
Advanced Topics in Game PhysicsAdvanced Topics in Game Physics Fracture mechanics (Fracture mechanics ( 破壞力學模擬破壞力學模擬 )) Fluid dynamics (Fluid dynamics ( 流體力學流體力學 )) Car dynamics (Car dynamics ( 車輛動力學車輛動力學 )) Rag-doll physics (Rag-doll physics ( 人體物理模擬人體物理模擬 ))
1010
Game Physics Middleware (Physics Engine)Game Physics Middleware (Physics Engine) FreewareFreeware
ODEODE Open Dynamics Engine (ODE)Open Dynamics Engine (ODE) http://www.ode.org/
BulletBullet Commercial ones (now almost free)Commercial ones (now almost free)
nVIDIA PhysX (Ageia PhysX)nVIDIA PhysX (Ageia PhysX) http://www.nvidia.com.tw/object/physx_new_tw.html Powered by CUDAPowered by CUDA
Harvok (Intel)Harvok (Intel) http://www.havok.com/http://www.havok.com/
1111
Initial value problemsInitial value problems Ordinary differential equationOrdinary differential equation
NNumerical solutionsumerical solutions EEuler’s methoduler’s method TThe midpoint methodhe midpoint method Runge-Kutta methodRunge-Kutta method
Differential Equation BasicsDifferential Equation Basics
1212
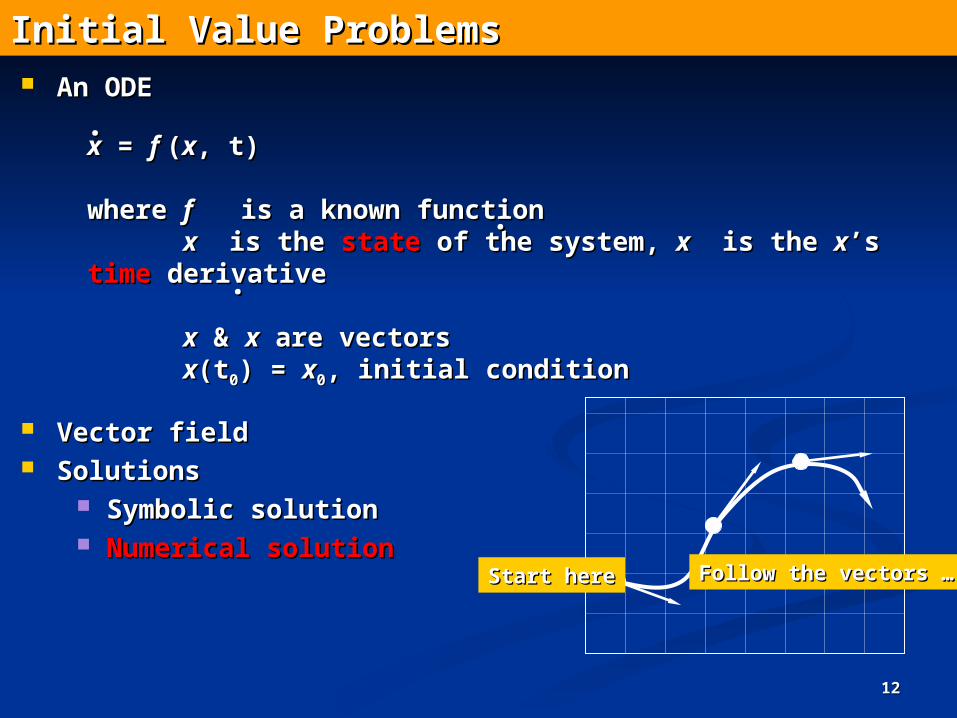
An ODEAn ODE
xx = = f f ((xx, t), t)
wherewhere ff is a known function is a known functionxx is the is the statestate of the system, of the system, xx is the is the xx’s ’s timetime derivative derivative
xx & & xx are vectors are vectorsxx(t(t00) = ) = xx00, initial condition, initial condition
..
Start hereStart here Follow the vectors …Follow the vectors …
Initial Value ProblemsInitial Value Problems
..
..
Vector fieldVector field SolutionsSolutions
Symbolic solutionSymbolic solution Numerical solutionNumerical solution
13
A numerical solution A simplification from Tayler’s series
Discrete time steps starting with initial value Simple but not accurate
Bigger steps, bigger errors O(t2) errorserrors
Can be unstableCan be unstable Not even efficientNot even efficient
x(t + t) = x(t) + t f(x, t)
Euler’s MethodEuler’s Method
1414
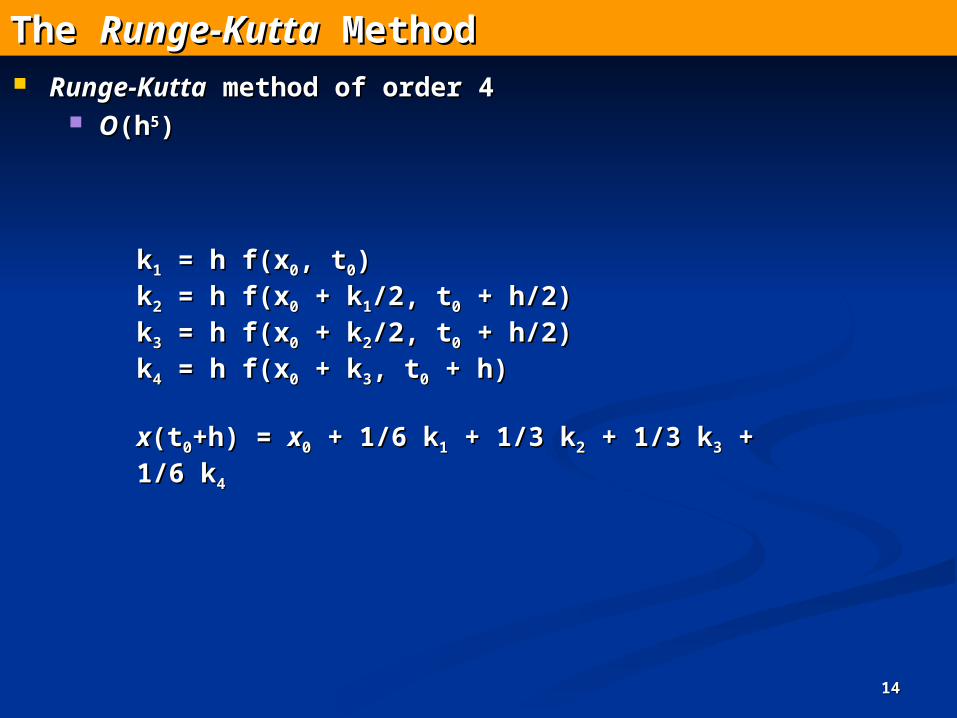
Runge-KuttaRunge-Kutta method of order 4 method of order 4 OO(h(h55))
kk11 = h f(x = h f(x00, t, t00))kk22 = h f(x = h f(x00 + k + k11/2, t/2, t00 + h/2) + h/2)kk33 = h f(x = h f(x00 + k + k22/2, t/2, t00 + h/2) + h/2)kk44 = h f(x = h f(x00 + k + k33, t, t00 + h) + h)
xx(t(t00+h) = +h) = xx00 + 1/6 k + 1/6 k11 + 1/3 k + 1/3 k22 + 1/3 k + 1/3 k33 + 1/6 k + 1/6 k44
The The Runge-KuttaRunge-Kutta Method Method
1515
The tendency of an object at rest to remain at rest.The tendency of an object at rest to remain at rest. The mass is a measure of the inertia of the object.The mass is a measure of the inertia of the object. The force is the general mechanism for changing the mechanical state of an The force is the general mechanism for changing the mechanical state of an
object.object. A force is a vector quantity.A force is a vector quantity. An external force is one where source is outside the system of interest.An external force is one where source is outside the system of interest. The standard unit of measurement for the magnitude of a force is a The standard unit of measurement for the magnitude of a force is a newtonnewton.. A newton is the required force magnitude to give 1kg mass 1m/secA newton is the required force magnitude to give 1kg mass 1m/sec22
acceleration.acceleration.
InertiaInertia
1616
First LawFirst Law In the absence of external forces, an object at rest will remain at rest.In the absence of external forces, an object at rest will remain at rest. If the object is in motion and no external forces acting on it, the object If the object is in motion and no external forces acting on it, the object
remains in motion with constant velocity.remains in motion with constant velocity. Only forces can change an object’s motion.Only forces can change an object’s motion.
Newton’s Laws (1/3)Newton’s Laws (1/3)
17
Second LawSecond Law For an object with constant mass over time, its acceleration For an object with constant mass over time, its acceleration aa is is
proportional to the force proportional to the force FF and inversely proportional to the mass and inversely proportional to the mass mm of the of the object : object : aa = = FF//mm..
If the mass changes over time, the more general statement of the law isIf the mass changes over time, the more general statement of the law is
Newton’s Laws (2/3)Newton’s Laws (2/3)
F F = (= (mmvv) = ) = mama + + vvdddtdt dtdt
ddmm
linear momentumlinear momentum
An object’s path of motion is determined from applied forces.An object’s path of motion is determined from applied forces.
1818
Third LawThird Law If the force exerted on one object, there is a force with equal magnitude but If the force exerted on one object, there is a force with equal magnitude but
opposite direction on some other that interacts with it.opposite direction on some other that interacts with it. Action and reaction always occur between interacting objects.Action and reaction always occur between interacting objects.
Newton’s Laws (3/3)Newton’s Laws (3/3)
1919
Gravitational forcesGravitational forces Spring forcesSpring forces Friction and other dissipative forcesFriction and other dissipative forces
ForcesForces
2020
Given two point masses Given two point masses mm and and MM that have gravitational interaction, they that have gravitational interaction, they attract each other with forces of equal magnitude but opposite direction, as attract each other with forces of equal magnitude but opposite direction, as indicated by Newton’s third law.indicated by Newton’s third law.
Gravitational Forces (1/2)Gravitational Forces (1/2)
FFgravitygravity = =GmMGmM
rr22
G = 6.67 x 10G = 6.67 x 10-11-11 newton-meter newton-meter22 per kg per kg22
(universal gravitational constant)(universal gravitational constant)
2121
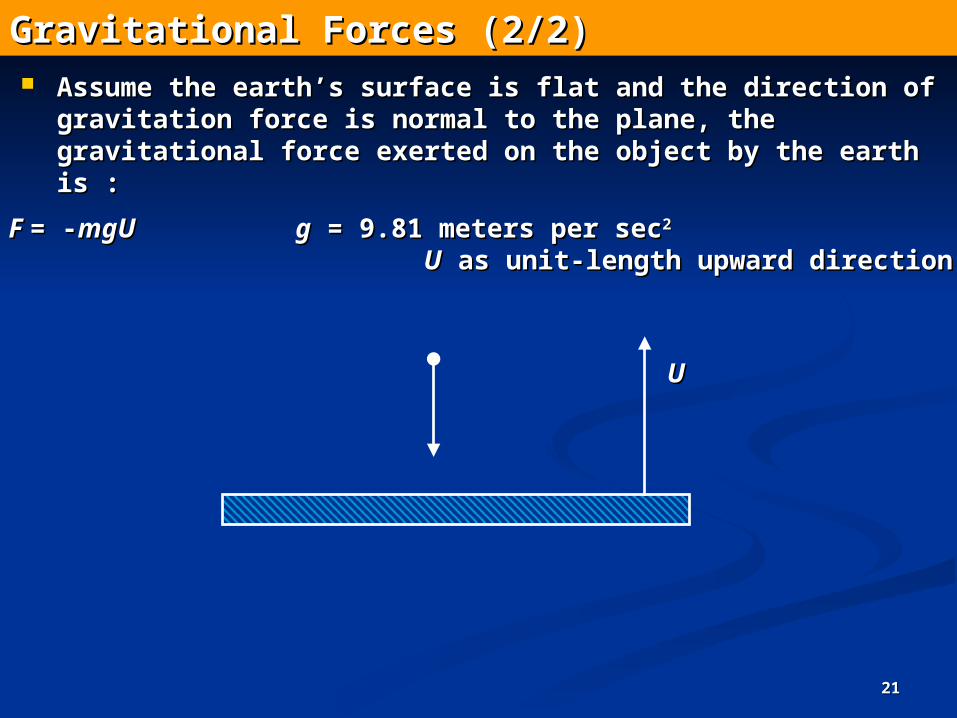
Gravitational Forces (2/2)Gravitational Forces (2/2) Assume the earth’s surface is flat and the direction of gravitation force is Assume the earth’s surface is flat and the direction of gravitation force is
normal to the plane, the gravitational force exerted on the object by the earth normal to the plane, the gravitational force exerted on the object by the earth is :is :
F F = -= -mgUmgU gg = 9.81 meters per sec = 9.81 meters per sec22
UU as unit-length upward direction as unit-length upward direction
UU
22
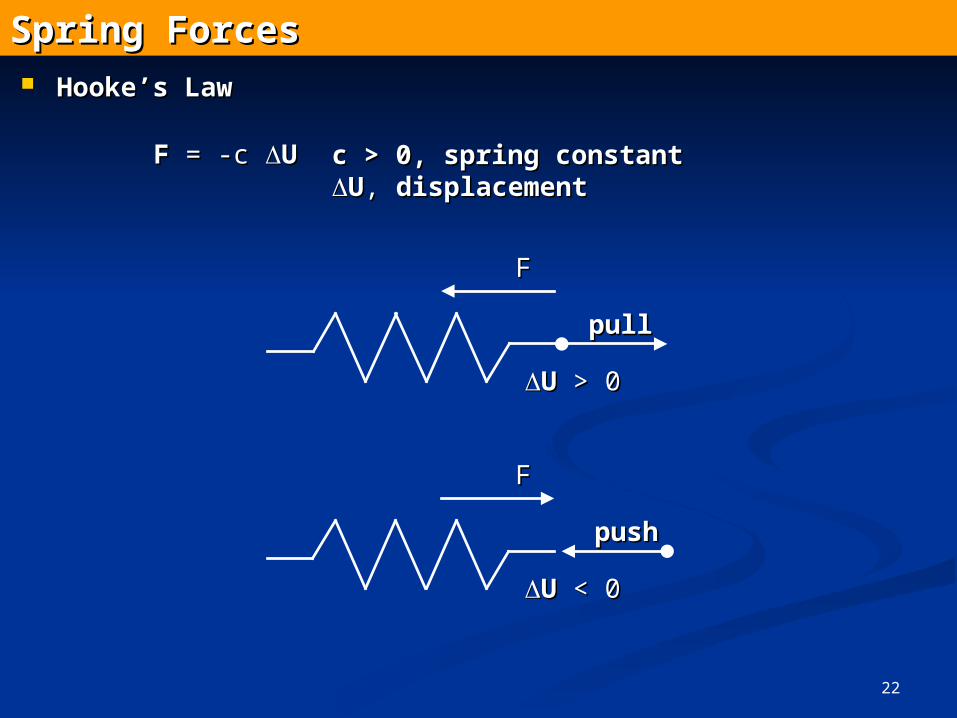
Spring ForcesSpring Forces Hooke’s LawHooke’s Law
FF = -c = -c UU c > 0, spring constantc > 0, spring constantUU, , displacementdisplacement
pullpull
FF
UU > 0 > 0
pushpush
FF
UU < 0 < 0
2323
Dissipative ForcesDissipative Forces A dissipative force is one for which energy of the system decreases when A dissipative force is one for which energy of the system decreases when
motion takes place.motion takes place. A simple model for a dissipative force :A simple model for a dissipative force :
FF = -c | = -c |vv||nn
Two common cases :Two common cases : FrictionFriction ViscosityViscosity
2424
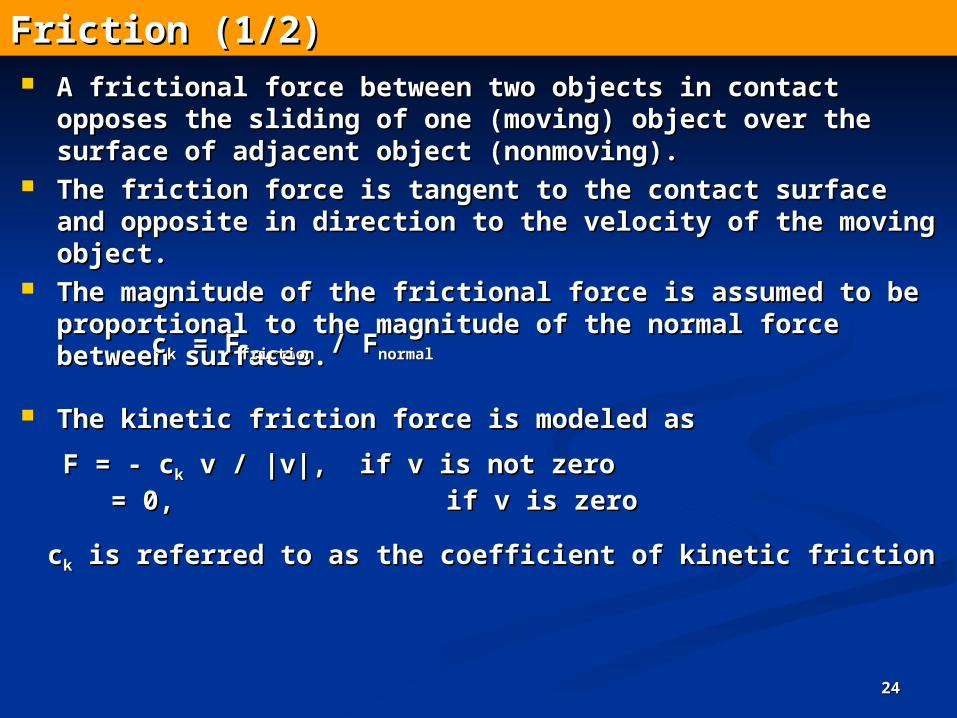
Friction (1/2)Friction (1/2) A frictional force between two objects in contact opposes the sliding of one A frictional force between two objects in contact opposes the sliding of one
(moving) object over the surface of adjacent object (nonmoving).(moving) object over the surface of adjacent object (nonmoving). The friction force is tangent to the contact surface and opposite in direction to The friction force is tangent to the contact surface and opposite in direction to
the velocity of the moving object.the velocity of the moving object. The magnitude of the frictional force is assumed to be proportional to the The magnitude of the frictional force is assumed to be proportional to the
magnitude of the normal force between surfaces.magnitude of the normal force between surfaces.
F = - cF = - ckk v / |v|, if v is not zero v / |v|, if v is not zero = 0, if v is zero= 0, if v is zero
cckk is referred to as the coefficient of kinetic friction is referred to as the coefficient of kinetic friction
The kinetic friction force is modeled asThe kinetic friction force is modeled as
cckk = F = Ffrictionfriction / F / Fnormalnormal
2525
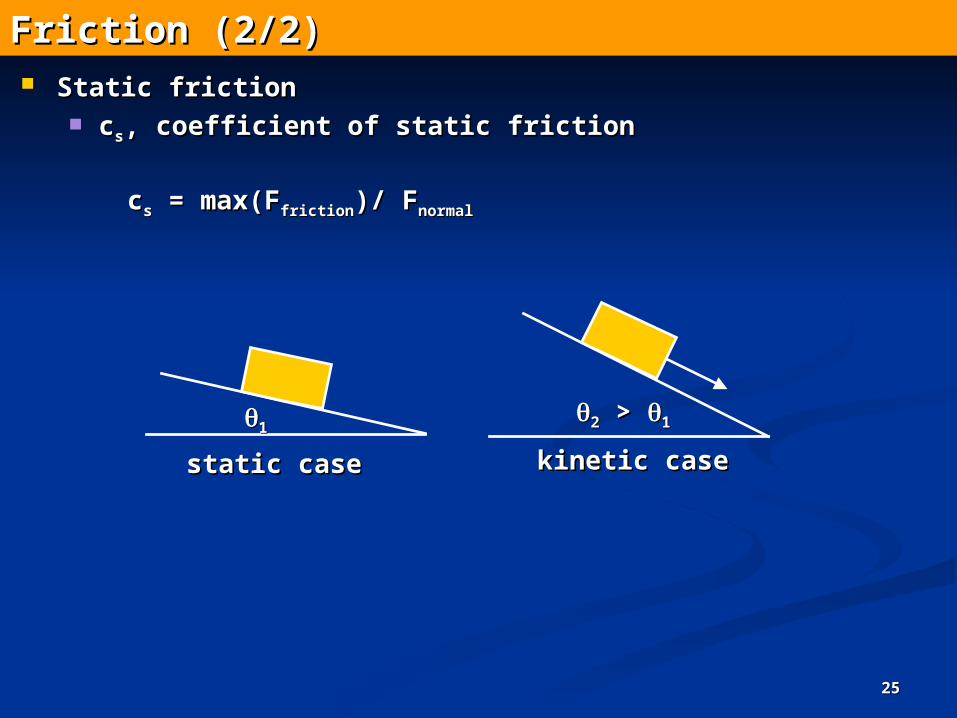
Friction (2/2)Friction (2/2) Static frictionStatic friction
ccss, coefficient of static friction, coefficient of static friction
1122 > > 11
static casestatic case kinetic casekinetic case
ccss = max(F = max(Ffrictionfriction)/ F)/ Fnormalnormal
2626
ViscosityViscosity A typical occurrence of this type of force is when an object is dragged through a A typical occurrence of this type of force is when an object is dragged through a
thick fluidthick fluid.. The force is modeled to have the direction opposite to that of the moving The force is modeled to have the direction opposite to that of the moving
object.object.
FF = - = -FFdissipativedissipative vv/|/|vv| = -(c|| = -(c|vv|) |) vv/|/|vv| = -c| = -cvv
c > 0c > 0
27
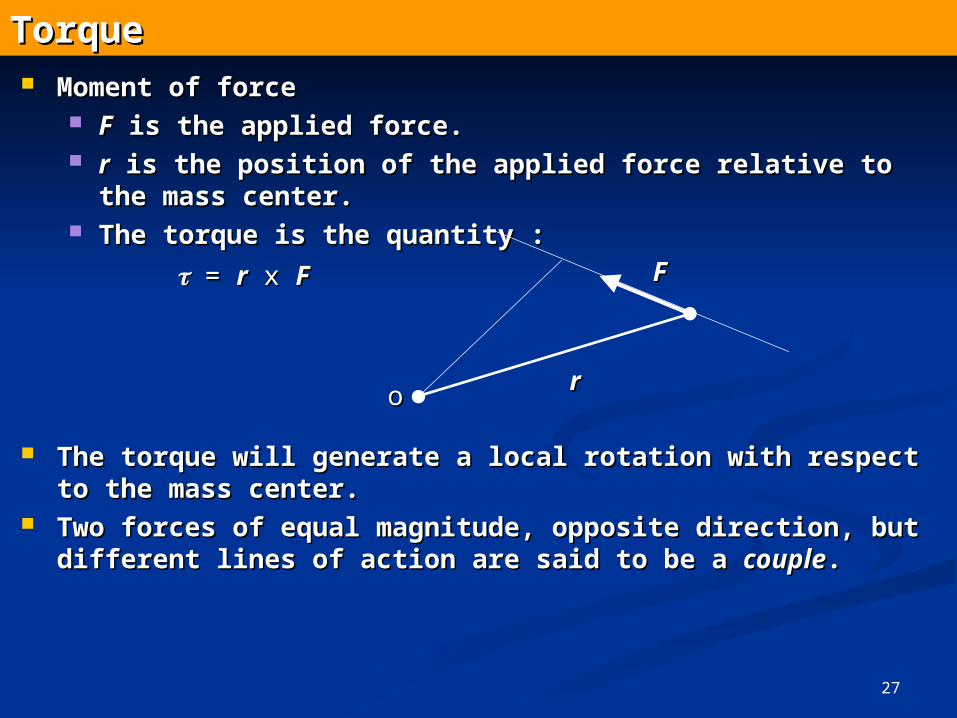
TorqueTorque Moment of forceMoment of force
FF is the applied force. is the applied force. rr is the position of the applied force relative to the mass center. is the position of the applied force relative to the mass center. The torque is the quantity :The torque is the quantity :
= = rr x x FF
oo rr
FF
The torque will generate a local rotation with respect to the mass center.The torque will generate a local rotation with respect to the mass center. Two forces of equal magnitude, opposite direction, but different lines of action Two forces of equal magnitude, opposite direction, but different lines of action
are said to be a are said to be a couplecouple..
2828
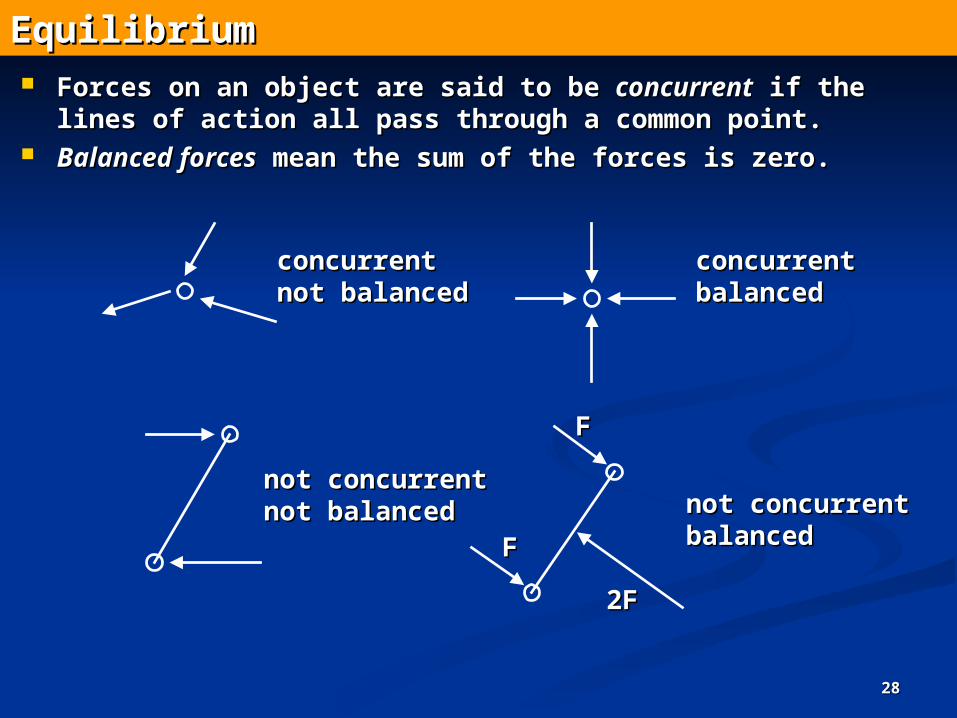
EquilibriumEquilibrium Forces on an object are said to be Forces on an object are said to be concurrentconcurrent if the lines of action all pass if the lines of action all pass
through a common point.through a common point. Balanced forcesBalanced forces mean the sum of the forces is zero. mean the sum of the forces is zero.
concurrentconcurrentnot balancednot balanced
concurrentconcurrentbalancedbalanced
not concurrentnot concurrentnot balancednot balanced not concurrentnot concurrent
balancedbalanced
FF
FF
2F2F
2929
MomentumMomentum Linear momentumLinear momentum Angular momentumAngular momentum
30
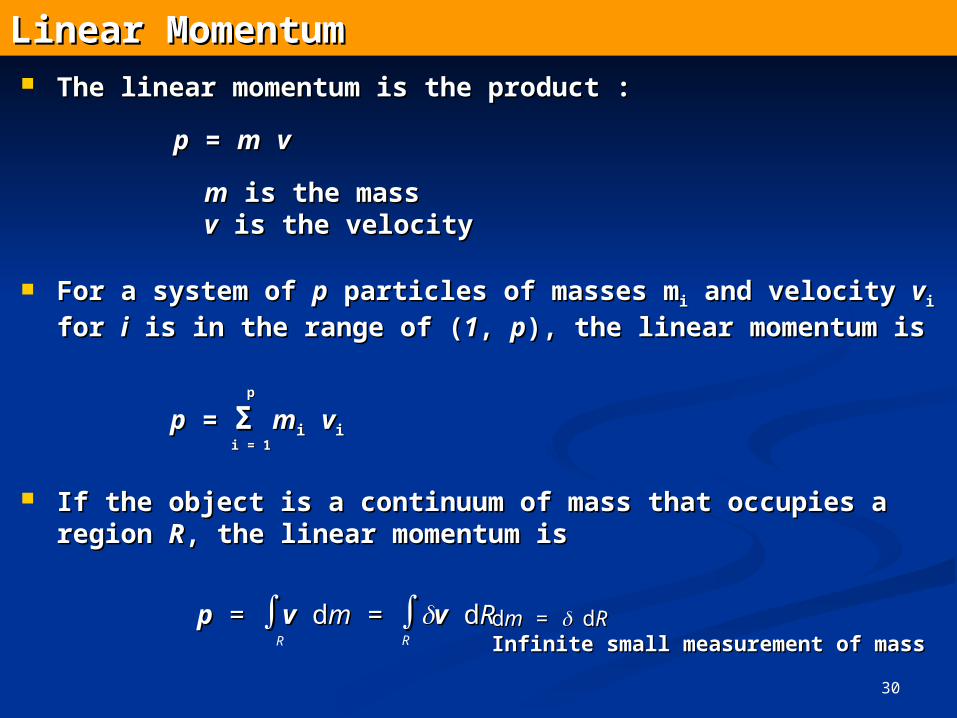
Linear MomentumLinear Momentum The linear momentum is the product :The linear momentum is the product :
pp = = mm vv
mm is the mass is the massvv is the velocity is the velocity
For a system of For a system of pp particles of masses m particles of masses mii and velocity and velocity vvii for for ii is in the range of ( is in the range of (11, , pp), the linear momentum is), the linear momentum is
pp = = Σ Σ mmii vvii
pp
i = 1i = 1
If the object is a continuum of mass that occupies a region If the object is a continuum of mass that occupies a region RR, the linear , the linear momentum ismomentum is
pp = = ∫∫vv d dmm = = ∫∫vv d dRRR R
ddmm = = ddRRInfinite small measurement of massInfinite small measurement of mass
31
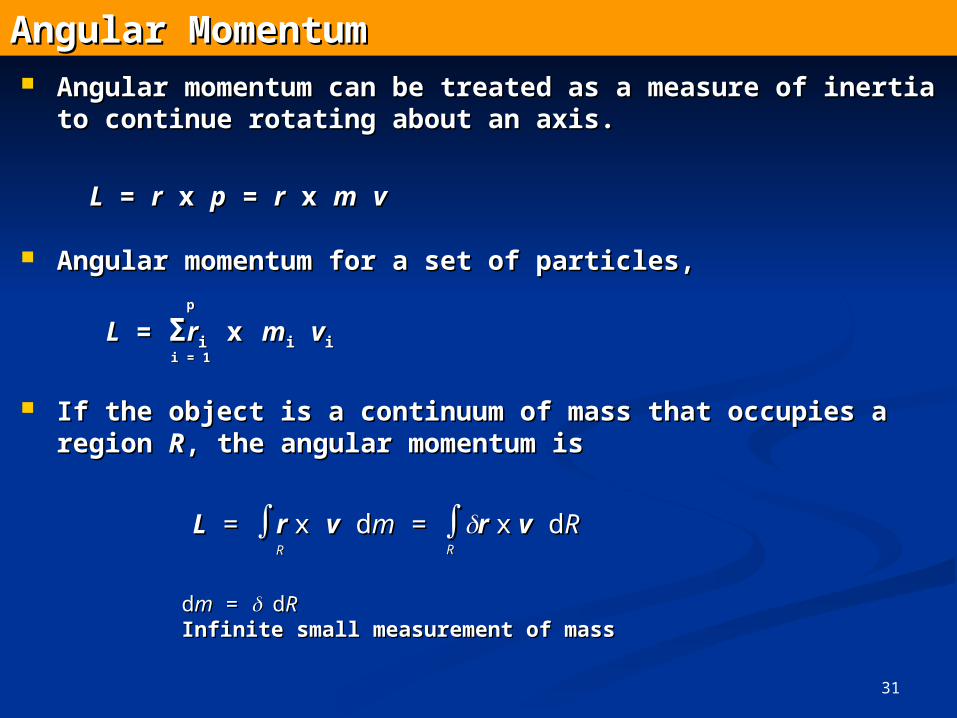
Angular MomentumAngular Momentum Angular momentum can be treated as a measure of inertia to continue rotating Angular momentum can be treated as a measure of inertia to continue rotating
about an axis.about an axis.
LL = = rr x x pp = = rr x x mm vv
Angular momentum for a set of particles,Angular momentum for a set of particles,
LL = = ΣΣrrii xx mmii vvii
pp
i = 1i = 1
If the object is a continuum of mass that occupies a region If the object is a continuum of mass that occupies a region RR, the angular , the angular momentum ismomentum is
LL = = ∫∫r r x x vv d dmm = = ∫∫rr xx vv d dRRRR RR
ddmm = = ddRRInfinite small measurement of massInfinite small measurement of mass
3232
Moment of InertiaMoment of Inertia The measure of the rotational inertia of a body about an axis is the The measure of the rotational inertia of a body about an axis is the moment of moment of
inertiainertia.. For a single particle, moment of inertia is For a single particle, moment of inertia is
II = = m rm r22 mm is the mass is the massrr is the distance to an axis is the distance to an axis
But for a rigid body object, the inertia will be integrated as a function of mass But for a rigid body object, the inertia will be integrated as a function of mass and the geometry shape.and the geometry shape. We will discuss it in the section of “Rigid-body Dynamics”We will discuss it in the section of “Rigid-body Dynamics”
Moment of inertia in one dimensionMoment of inertia in one dimension Moment of inertia in two dimensionMoment of inertia in two dimension Moment of inertia in three dimensionMoment of inertia in three dimension Mass and Inertia tensor of a solid polyhedronMass and Inertia tensor of a solid polyhedron
33
Particles are objects with Mass Position Velocity Respond to forces
But no spatial extent (no size!) Point mass
Based on Newton Laws f = ma x = f / m v = f / m, v = x
Particle Dynamics
... .
3434
Euler’s Method for Particle SystemEuler’s Method for Particle System
vv(t + (t + t) = t) = vv(t) + (t) + t t f’f’(v, t)(v, t)xx(t + (t + t) = t) = xx(t) + (t) + t t ff(x, t)(x, t)
Discrete time steps starting with initial valueDiscrete time steps starting with initial value t = tt = t00, t, t11, t, t22, …, … Fixed frame rate but adaptive sampling rateFixed frame rate but adaptive sampling rate
Simple but not accurateSimple but not accurate Bigger steps, bigger errorsBigger steps, bigger errors OO((tt22) errors) errors
Can be unstableCan be unstable Not even efficientNot even efficient
If the time step is very tinyIf the time step is very tiny Calculate the velocity firstCalculate the velocity first
Then the position Then the position
3535
Particle StatesParticle States PositionPosition VelocityVelocity MassMass LifeLife EtcEtc
BBounce rateounce rate OpacityOpacity ColorColor
IIn game application, we always put a billboard object with texture animation n game application, we always put a billboard object with texture animation on a particle to simulate the geometry shape of the particle.on a particle to simulate the geometry shape of the particle.
36
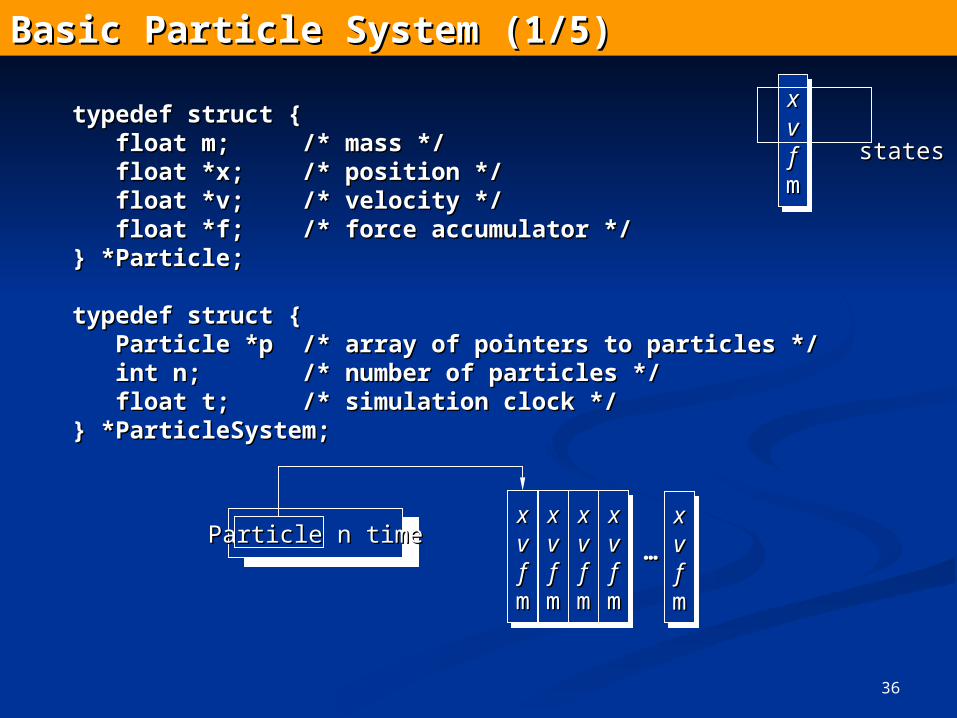
typedef struct {typedef struct { float m; /* mass */float m; /* mass */ float *x; /* position */float *x; /* position */ float *v; /* velocity */float *v; /* velocity */ float *f; /* force accumulator */float *f; /* force accumulator */} *Particle;} *Particle;
typedef struct {typedef struct { Particle *p /* array of pointers to particles */Particle *p /* array of pointers to particles */ int n; /* number of particles */int n; /* number of particles */ float t; /* simulation clock */float t; /* simulation clock */} *ParticleSystem;} *ParticleSystem;
xxvvff
mmstatesstates
xxvvff
mm
xxvvff
mm
xxvvff
mm
xxvvff
mm
xxvvff
mm
……Particle n timeParticle n time
Basic Particle System (1/5)Basic Particle System (1/5)
37
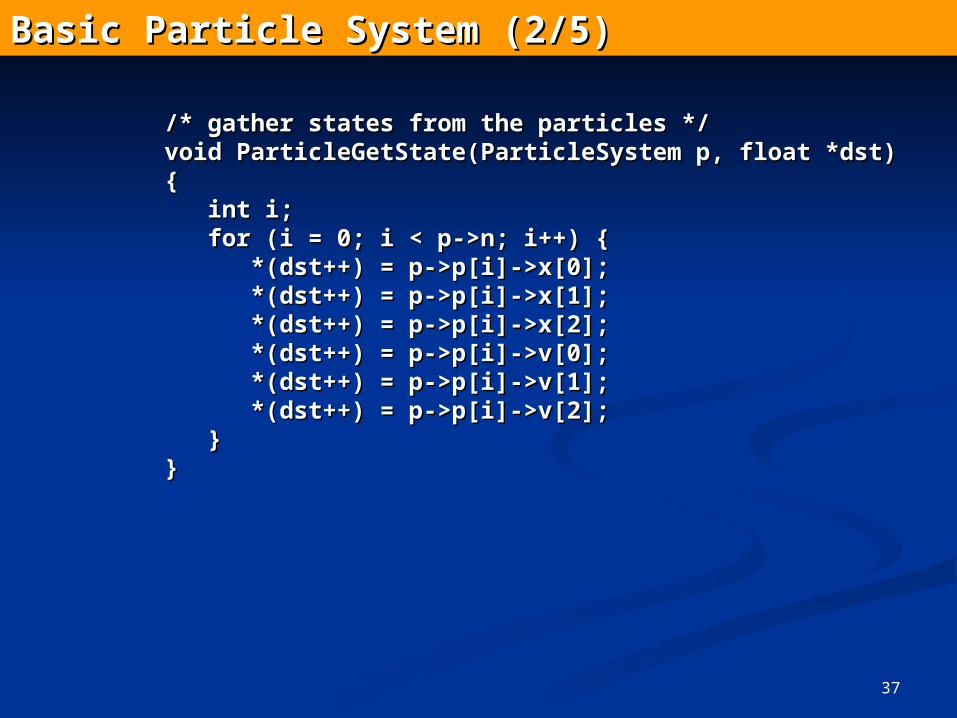
/* gather states from the particles *//* gather states from the particles */void ParticleGetState(ParticleSystem p, float *dst)void ParticleGetState(ParticleSystem p, float *dst){{ int i;int i; for (i = 0; i < p->n; i++) {for (i = 0; i < p->n; i++) { *(dst++) = p->p[i]->x[0];*(dst++) = p->p[i]->x[0]; *(dst++) = p->p[i]->x[1];*(dst++) = p->p[i]->x[1]; *(dst++) = p->p[i]->x[2];*(dst++) = p->p[i]->x[2]; *(dst++) = p->p[i]->v[0];*(dst++) = p->p[i]->v[0]; *(dst++) = p->p[i]->v[1];*(dst++) = p->p[i]->v[1]; *(dst++) = p->p[i]->v[2];*(dst++) = p->p[i]->v[2]; }}}}
Basic Particle System (2/5)Basic Particle System (2/5)
38
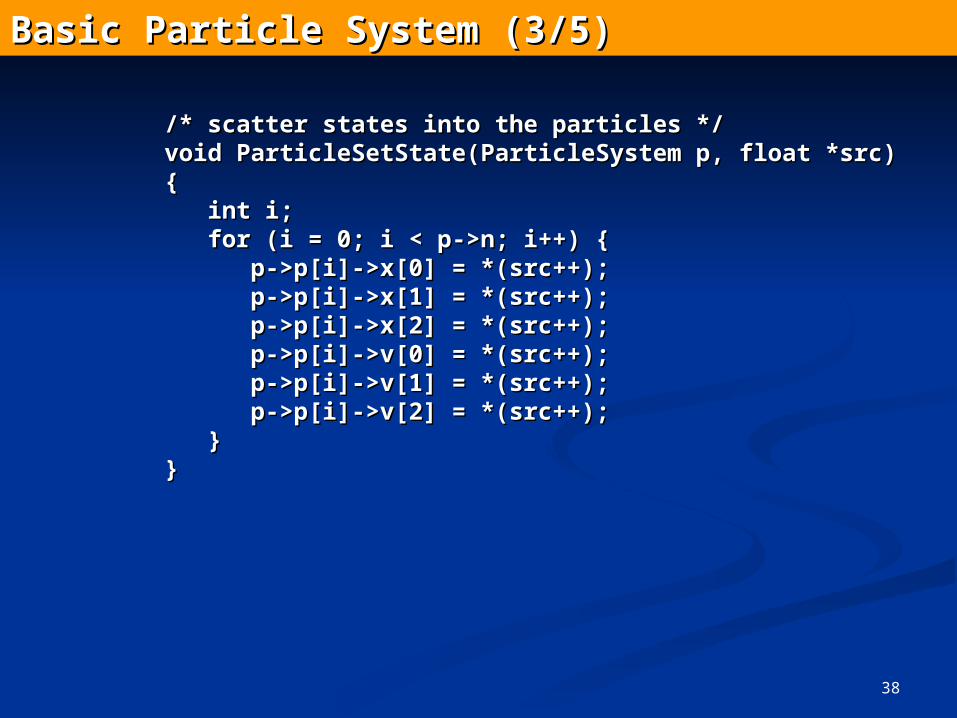
/* scatter states into the particles *//* scatter states into the particles */void ParticleSetState(ParticleSystem p, float *src)void ParticleSetState(ParticleSystem p, float *src){{ int i;int i; for (i = 0; i < p->n; i++) {for (i = 0; i < p->n; i++) { p->p[i]->x[0] = *(src++);p->p[i]->x[0] = *(src++); p->p[i]->x[1] = *(src++);p->p[i]->x[1] = *(src++); p->p[i]->x[2] = *(src++);p->p[i]->x[2] = *(src++); p->p[i]->v[0] = *(src++);p->p[i]->v[0] = *(src++); p->p[i]->v[1] = *(src++);p->p[i]->v[1] = *(src++); p->p[i]->v[2] = *(src++);p->p[i]->v[2] = *(src++); }}}}
Basic Particle System (3/5)Basic Particle System (3/5)
39
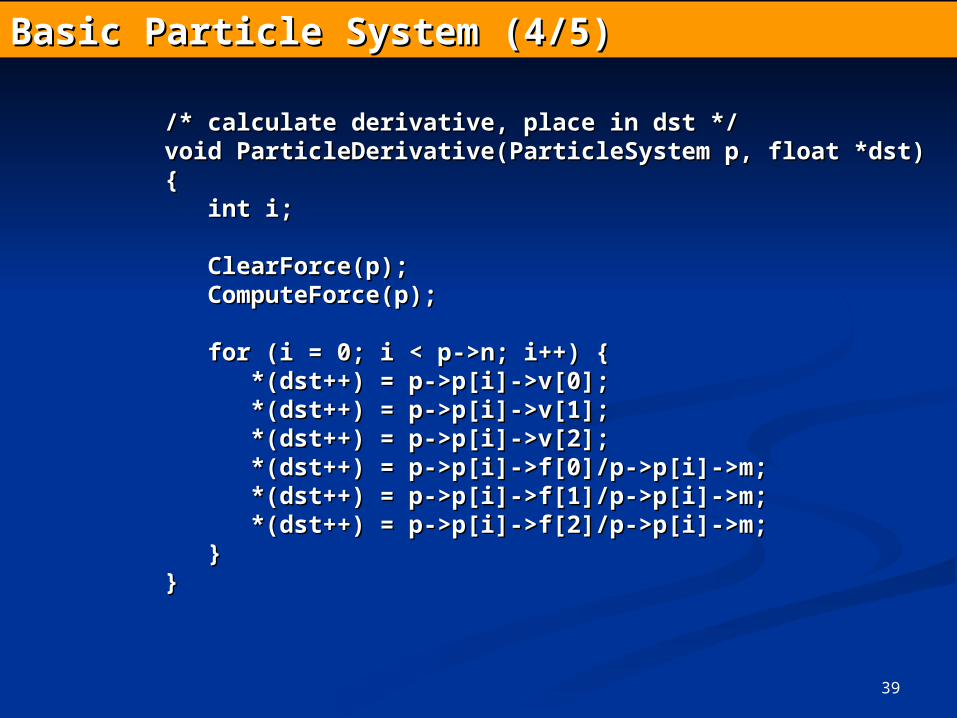
/* calculate derivative, place in dst *//* calculate derivative, place in dst */void ParticleDerivative(ParticleSystem p, float *dst)void ParticleDerivative(ParticleSystem p, float *dst){{ int i;int i;
ClearForce(p);ClearForce(p); ComputeForce(p);ComputeForce(p);
for (i = 0; i < p->n; i++) {for (i = 0; i < p->n; i++) { *(dst++) = p->p[i]->v[0];*(dst++) = p->p[i]->v[0]; *(dst++) = p->p[i]->v[1];*(dst++) = p->p[i]->v[1]; *(dst++) = p->p[i]->v[2];*(dst++) = p->p[i]->v[2]; *(dst++) = p->p[i]->f[0]/p->p[i]->m;*(dst++) = p->p[i]->f[0]/p->p[i]->m; *(dst++) = p->p[i]->f[1]/p->p[i]->m;*(dst++) = p->p[i]->f[1]/p->p[i]->m; *(dst++) = p->p[i]->f[2]/p->p[i]->m;*(dst++) = p->p[i]->f[2]/p->p[i]->m; }}}}
Basic Particle System (4/5)Basic Particle System (4/5)
40
/* Euler Solver *//* Euler Solver */void EulerStep(ParticleSystem p, float DeltaT)void EulerStep(ParticleSystem p, float DeltaT){{ ParticleDeriv(p, temp1);ParticleDeriv(p, temp1); ScaleVector(temp1, DeltaT);ScaleVector(temp1, DeltaT); ParticleGetState(p, temp2);ParticleGetState(p, temp2); AddVector(temp1, temp2, temp2);AddVector(temp1, temp2, temp2); ParticleSetState(p, temp2);ParticleSetState(p, temp2); p->t += DeltaT;p->t += DeltaT;}}
Basic Particle System (5/5)Basic Particle System (5/5)
4141
The Rigid BodyThe Rigid Body Non-deformable bodyNon-deformable body
Within the body, the distance between two points are constant.Within the body, the distance between two points are constant. Rigid body motionRigid body motion
KinematicsKinematics DynamicsDynamics
Degree of freedomDegree of freedom 3 3 rotationsrotations 3 3 translationstranslations
Mass of a bodyMass of a body Mass centerMass center
ForceForce Linear momentumLinear momentum
TorqueTorque Angular momentumAngular momentum
Inertia tensorInertia tensor
42
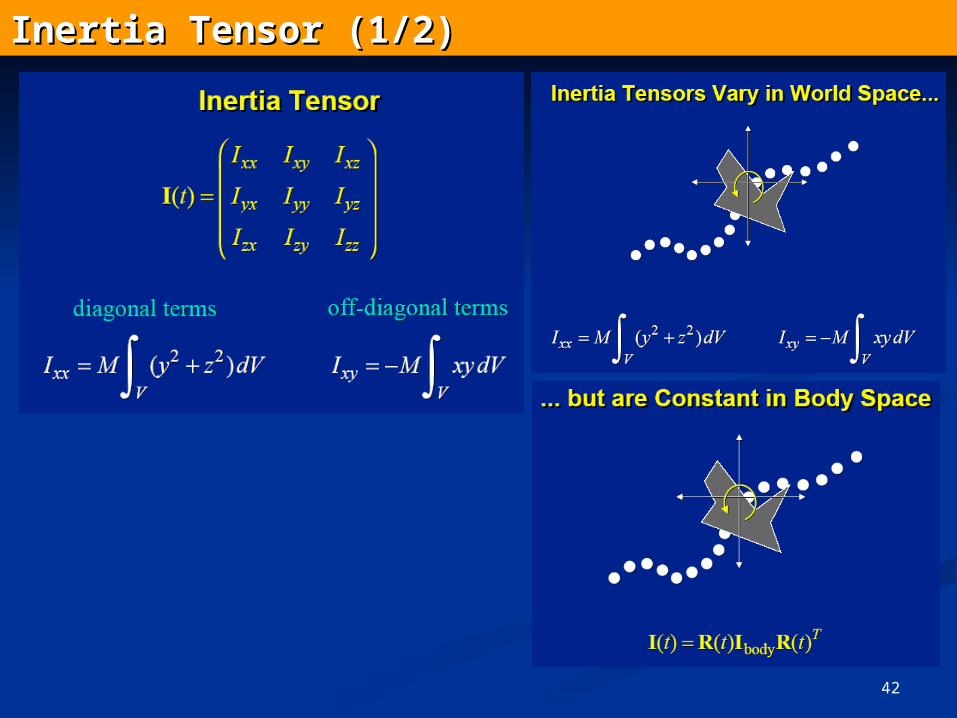
Inertia Tensor (1/2)Inertia Tensor (1/2)
4343
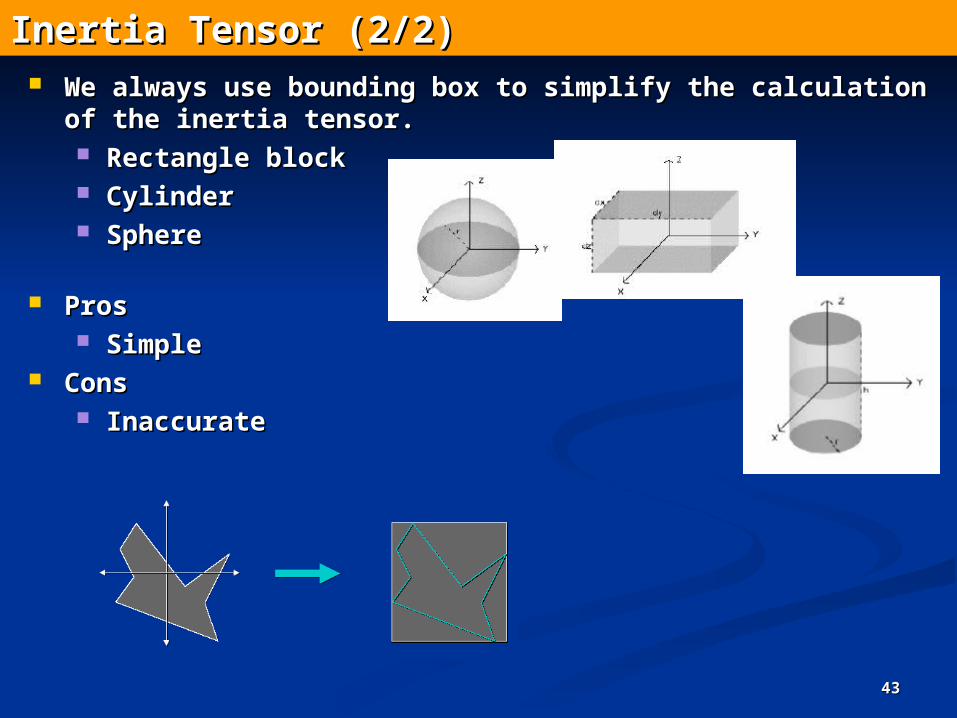
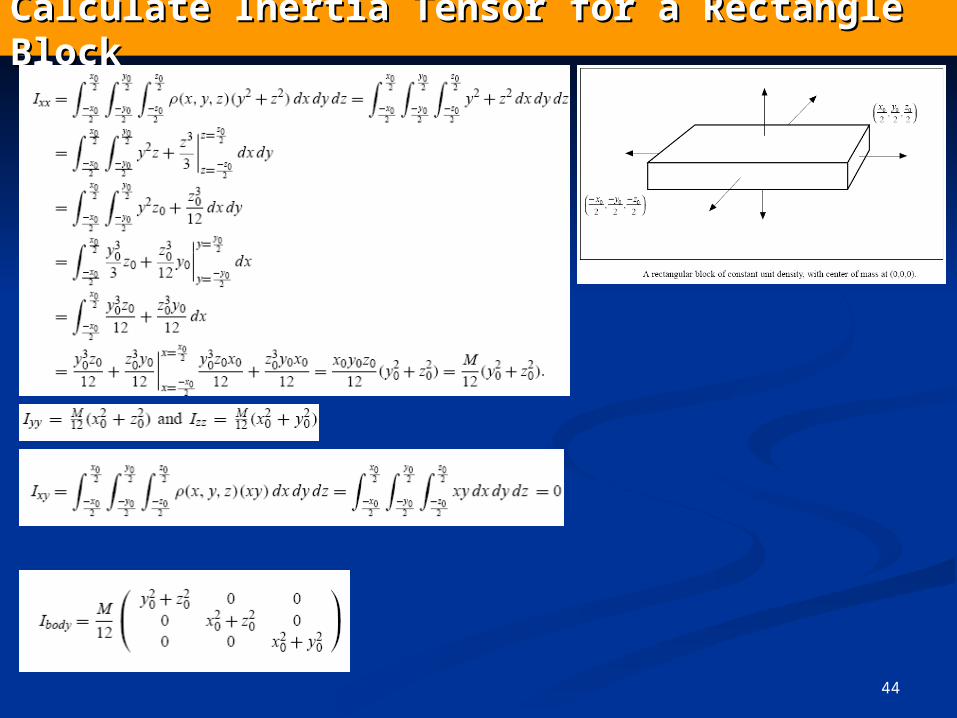
Inertia Tensor (2/2)Inertia Tensor (2/2) We always use bounding box to simplify the calculation of the inertia tensor.We always use bounding box to simplify the calculation of the inertia tensor.
Rectangle blockRectangle block CylinderCylinder SphereSphere
ProsPros SimpleSimple
ConsCons InaccurateInaccurate
44
Calculate Inertia Tensor for a Rectangle BlockCalculate Inertia Tensor for a Rectangle Block
4545
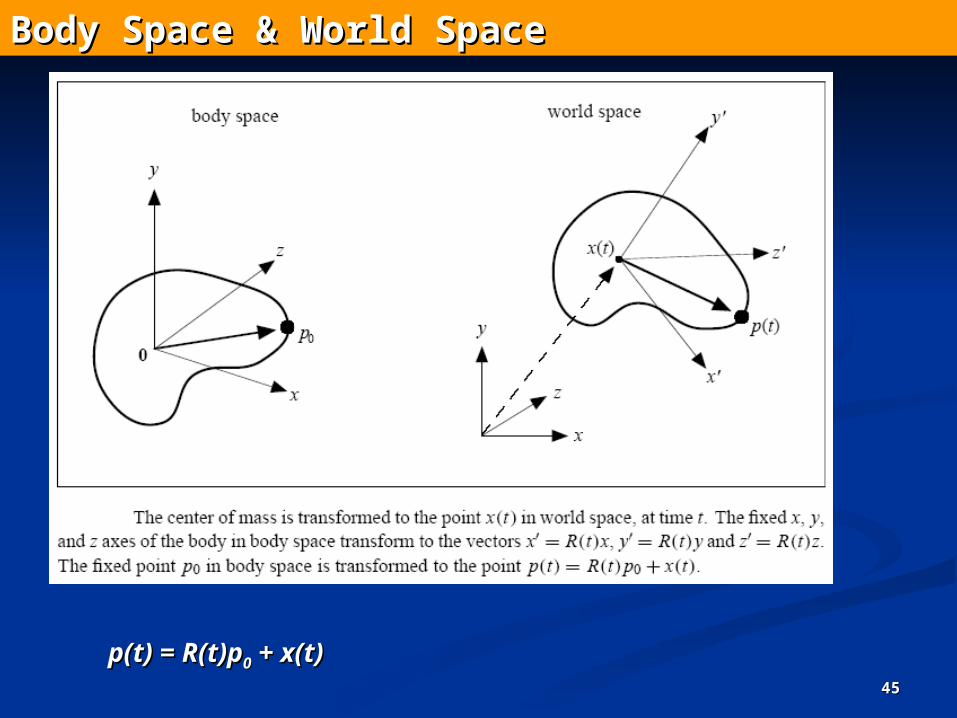
Body Space & World SpaceBody Space & World Space
p(t) = R(t)pp(t) = R(t)p00 + x(t) + x(t)
4646
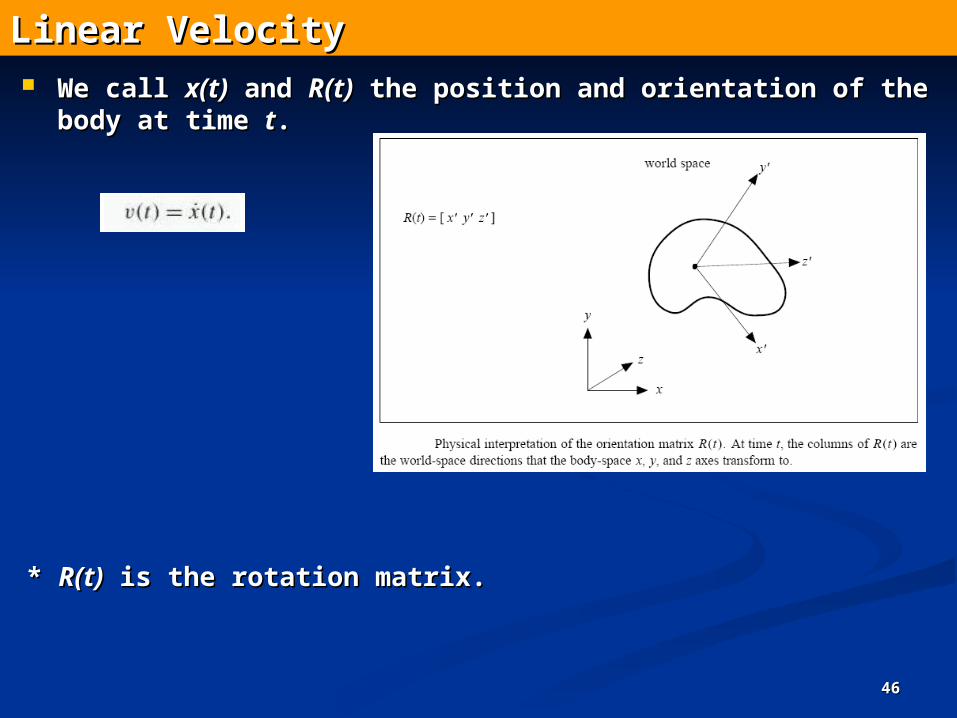
Linear VelocityLinear Velocity We call We call x(t)x(t) and and R(t)R(t) the position and orientation of the body at time the position and orientation of the body at time tt..
* * R(t)R(t) is the rotation matrix. is the rotation matrix.
47
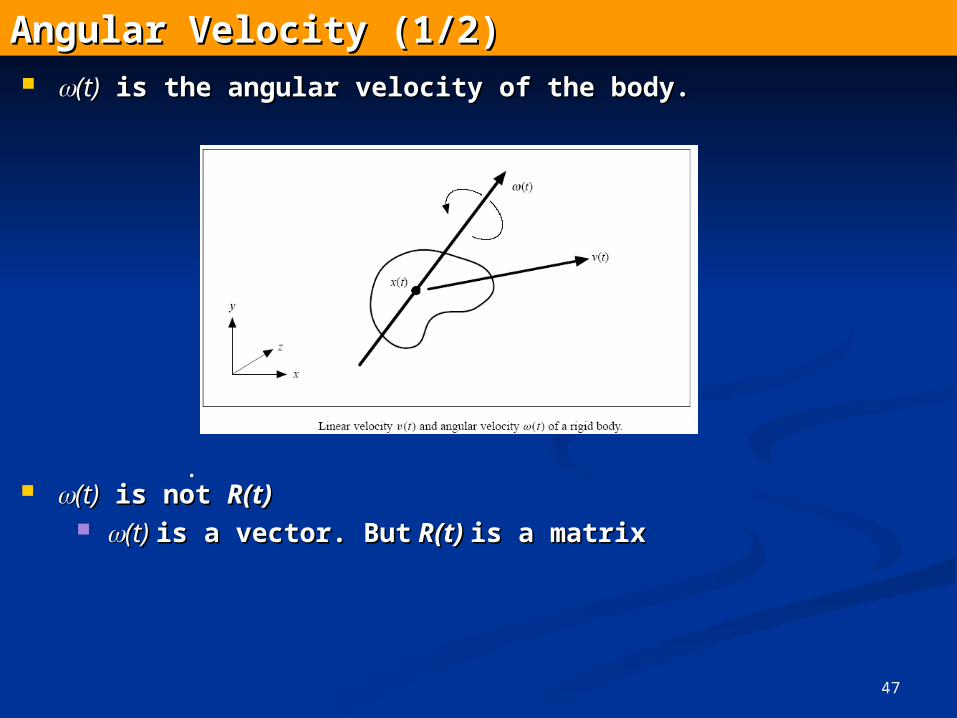
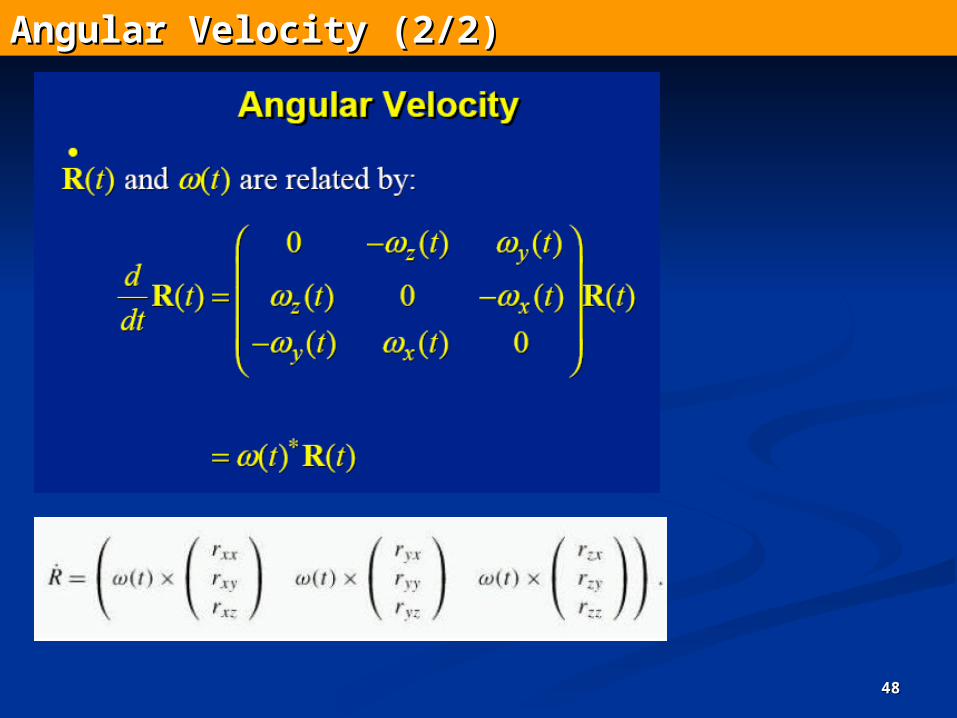
Angular Velocity (1/2)Angular Velocity (1/2) (t)(t) is the angular velocity of the body.is the angular velocity of the body.
(t)(t) is not is not R(t)R(t) (t) (t) is a vector. Butis a vector. But R(t) R(t) is a matrixis a matrix
.
4848
Angular Velocity (2/2)Angular Velocity (2/2)
4949
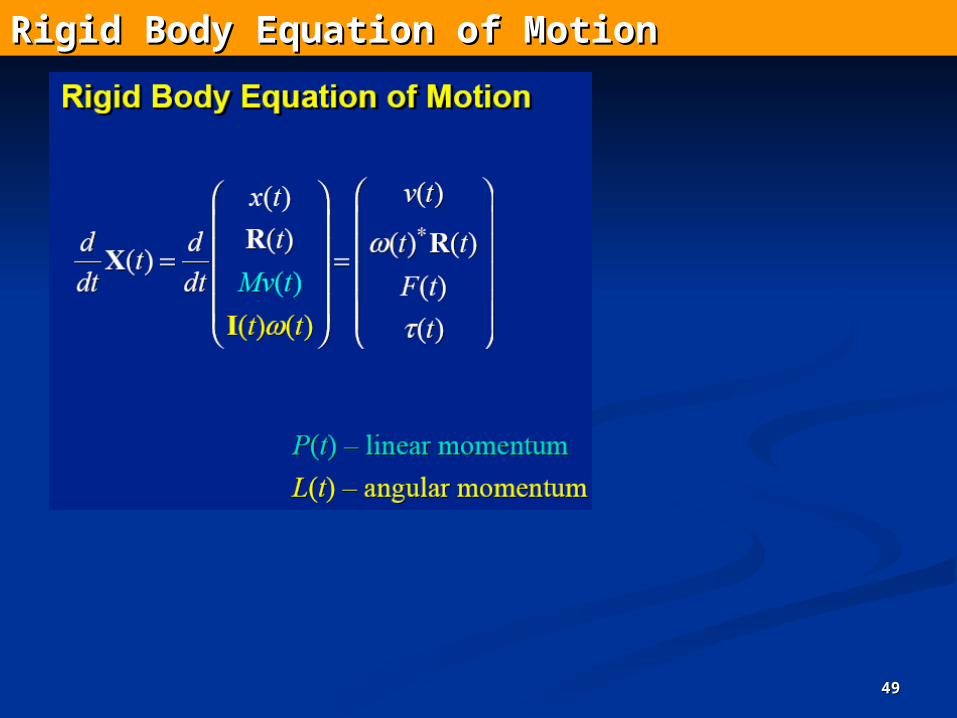
Rigid Body Equation of MotionRigid Body Equation of Motion
5050
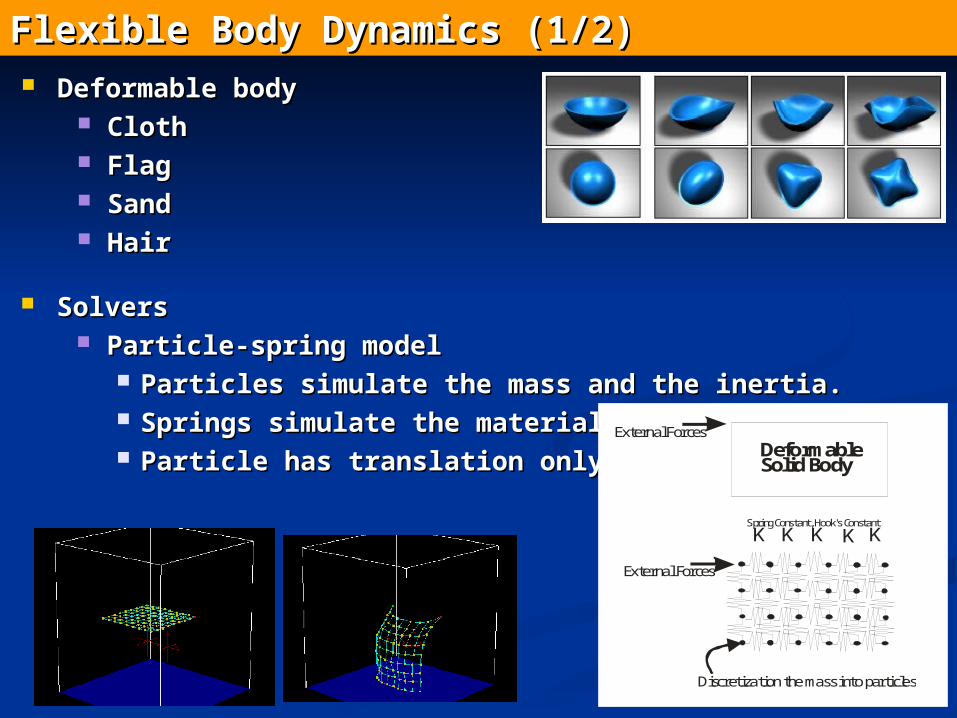
Flexible Body Dynamics (1/2)Flexible Body Dynamics (1/2) Deformable bodyDeformable body
ClothCloth FFlaglag SSandand HHairair
SolversSolvers PParticle-spring modelarticle-spring model
PParticles simulate the mass and the inertia.articles simulate the mass and the inertia. SSprings simulate the material.prings simulate the material. PParticle has translation only.article has translation only.
External Forces
K K KKKSpring Constant, Hook's Constant
External Forces
Discretization the mass into particles
Deformable Solid Body
5151
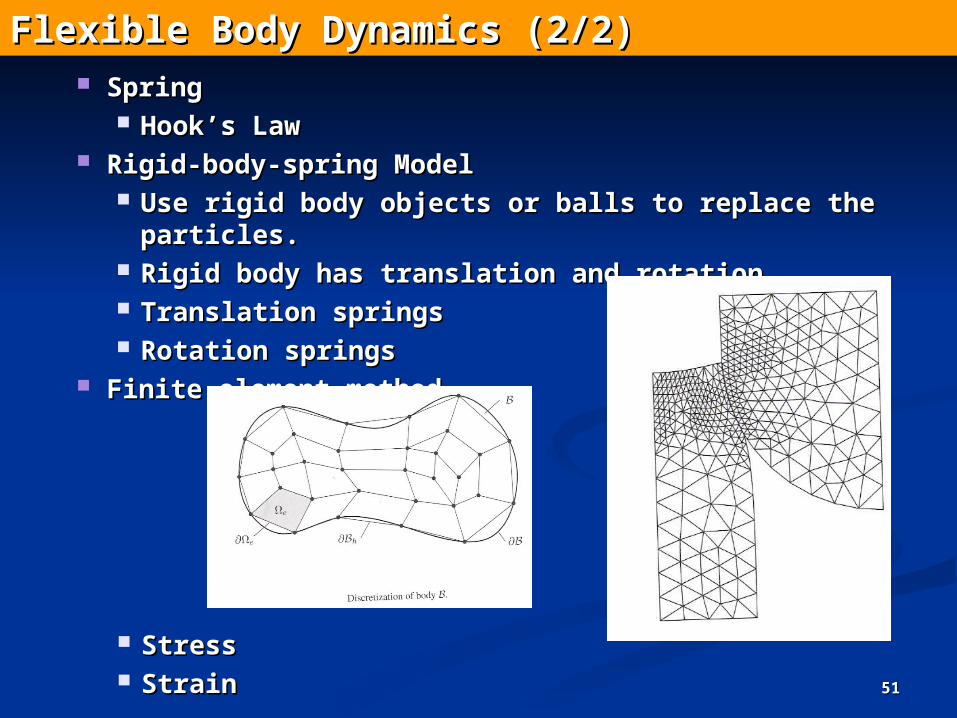
Flexible Body Dynamics (2/2)Flexible Body Dynamics (2/2) SpringSpring
Hook’s LawHook’s Law Rigid-body-spring ModelRigid-body-spring Model
UUse rigid body objects or balls to replace the particles.se rigid body objects or balls to replace the particles. RRigid body has translation and rotation.igid body has translation and rotation. TTranslation springsranslation springs RRotation springsotation springs
FFinite element methodinite element method
SStresstress SStraintrain