Embed Size (px)
Citation preview

1
Crisp Control Is Always Better Than Fuzzy Feedback Control
MICHAEL ATHANS
Professor of Electrical Engineering (Emeritus)
MIT, Cambridge, Mass., USA
and
Visiting Scientist, Instituto de Sistemas e Robotica
Instituto Superior Tecnico, Lisbon, PORTUGAL
[email protected] or [email protected]
EUFIT ´99 DEBATE WITH PROF. L.A. ZADEH
Aachen, Germany, September 1999

2Debating Points• I like Fuzzy Logic as an alternative to probability theory, especially in
applications involving man-machine interactions• Fuzzy feedback control methods represent inferior engineering
practice, often by people that never bothered to learn control theory and design
• Fuzzy feedback control is a vacuous technology for the design of high-performance control systems
• Fuzzy control methods are “parasitic;” they simply implement trivial interpolations of control strategies obtained by other means• Theological arguments about “fuzzification”, “defuzzification”,
nonlinear control, and inherent robustness are simply nonsense• Fuzzy feedback control has failed to capture and utilize alternative
means in dealing with uncertainty using Fuzzy Sets and Fuzzy Logic• Prof. Zadeh should communicate to his disciples the sorry state of
affairs in fuzzy feedback control and tell them to “shape-up”

3Crisp Vs Fuzzy Feedback Control
• Crisp control: Normative - prescriptive• Quantitative models of plant dynamics and disturbances• Precise definition of performance specifications• Modeling and environmental uncertainty accounted for• Rigorous optimization-based design
• Fuzzy control: Empirical - descriptive• 1st generation (Mamdani). Ad-hoc interpolation of “expert” control
rule-based system• Vast majority of “fuzzy applications” use this method
• 2nd generation (Takagi-Sugeno). Ad-hoc interpolation of control strategies derived from crisp feedback control methodologies
• Fuzzy control has failed the noble goal of “fuzzy logic” in providing alternatives in dealing with uncertainty

4The Joy of Feedback
• Measure system response, including effects of disturbances, using (noisy) sensors
• Compare actual system response to desired system response at each time• “Error” signal(s) = (Desired response)-(Actual response)
• Use “error” signals to drive compensator (controller) so as to generate real-time control corrections so as to keep “errors” small for all time
• FEEDBACK ESSENTIAL TO GUARANTEE GOOD PERFORMANCE IN THE PRESENCE OF UNCERTAINTY

5Why Feedback?
• Automatic feedback control systems have been used since the 1930´s to provide superior performance and higher fidelity than manual control systems requiring human operators
• The SCIENCE of Feedback Control was developed to allow engineering designs that deliver this superior performance, NOT to duplicate poor human control performance
• The performance payoffs are even more dramatic in the case of coupled multivariable systems, i.e. systems with many sensors and control inputs• crisp control theory exploits the tight dynamic coupling• humans are notorious in lacking ability to develop control rules for
such multivariable systems• Increased cost of feedback (sensors, actuators, processors,...) is
justified by increased performance capabilities• sensor/actuator hardware costs greatly exceed processing costs

6Fixed Structure Feedback
• Compensator structure does not change (no learning)• No change in digital processor algorithms that approximate the
solution of compensator differential equations and gains• Design methodologies available for general multivariable case using
(crisp) robust-control theories and algorithms
DISTURBANCES
DYNAMIC SYSTEM (PLANT)
CONTROLLER (COMPENSATOR)
COMMANDS CONTROLS OUTPUTS

7Adaptive Feedback Control
• Uncertain plant parameters identified in real-time and compensator parameters are adjusted also in real-time
DISTURBANCES
DYNAMIC SYSTEM (PLANT)
CONTROLLER (COMPENSATOR)
COMMANDS CONTROLS OUTPUTS
IDENTIFICATION
PARAMETERADJUSTMENT
LOGIC
REAL-TIME

8Fault-Tolerant Feedback
• “Supervisory” level monitors for failures• Failure isolated and identified• Compensator structure and algorithms modified
DISTURBANCES
DYNAMIC SYSTEM (PLANT)
CONTROLLER (COMPENSATOR)
COMMANDS CONTROLS OUTPUTS
REAL-TIME FAILURE DETECTION ISOLATION
CONTROLRECONFIGURATION
LOGIC

9Crisp Mathematical Control
• Based upon analytical description of plant dynamics, model errors, environment, constraints, and performance objectives
• Optimal Control Theory• Used to generate “open-loop” preprogrammed control and state
variable trajectories as a function of time• Feedback Control Theory
• Used to ensure precise command-following and disturbance-rejection performance, in the presence of uncertainty, using feedback of sensed variables
• stability guarantees are essential• performance guarantees (in the presence of uncertain models)
are desirable

10Closed-Loop Stability
• “Models have limitations, stupidity does not!”• Feedback control can result in superior performance• Careless feedback strategies can cause instabilities• Closed-loop stability must be guaranteed for family of plants (stability-
robustness)• stability guarantees for “nominal” plant and nominal plant
simulations are not enough• control engineers must be paranoid about closed-loop stability

11Crisp Feedback Theory Status
• Start with global nonlinear dynamic model of plant (nonlinear differential or difference equations)
• Using “linearization” establish a collection of linear models in vicinity of operating conditions
• Generate linear multivariable dynamic compensator with guaranteed stability-robustness and performance-robustness properties for each linear model
• Use “gain-scheduling” of the parameters of the linear compensator collection to derive a single global nonlinear dynamic compensator for the global nonlinear plant

12
Linearization, Gain-Scheduling
LM:1
LM:2
LM:3
LM:4
LM:k LC:1
LC:2
LC:3
LC:4
LC:k
Global Nonlinear
Plant
Global Nonlinear Dynamic
Compensator
Family of linear dynamic models Family of linear dynamic compensators

13Robust Feedback Control Design
• Start with nominal state-space model of linear MIMO dynamic system• Define bounds on model errors (class of “legal” errors)
• parametric uncertainty; upper and lower bounds for key coefficients
• unstructured uncertainty; worst size of dynamic errors as a function of frequency (bending modes, torsional modes, actuator/sensor errors, ....)
• Model exogenous signals (a key requirement for superior performance)• power spectral densities of commands, disturbances and sensor
noise• Quantify robust-performance specifications in the frequency domain
Design is meaningless unless performance specs are quantified

14Robust MIMO Feedback Design• LQG or H2 method
• performance goal: minimize RMS errors of stochastic performance variables
• H method�• performance goal: minimize maximum errors assuming worst-case
exogenous disturbances• Robust feedback design is done via mixed- (structured singular value)
synthesis. Iterative generation of H dynamic compensators (of �increasing complexity) to guarantee stability-robustness and performance-robustness
• Generate linear multivariable dynamic compensator with guaranteed stability-robustness and performance-robustness properties for each linear model (model errors are explicitly accounted for)
• Use “gain scheduling” of the parameters of the linear compensator collection to derive a single global nonlinear dynamic compensator for the global nonlinear plant• controller involves real-time solution of coupled nonlinear differential
equations

15Fuzzy Feedback Systems (Mamdani)
• 1st generation fuzzy feedback control systems• start with set of “expert” discrete-valued control rules (if-then...),
often obtained from human operators• interpolate between discrete control rules using “membership
functions” from fuzzy set theory• No explicit quantitative statement of performance specifications• No quantitative modeling of plant dynamics, disturbance and sensor
noise characteristics• No stability-robustness or performance-robustness guarantees• Lots of “theology”, hand-waiving and scientifically unfounded claims• Simulation based results (where does model used for simulation come
from?)

16Fuzzy Control (Mamdani)
de\e NL NS ZE PS PLNL PL PL PS ZE NSNS PL PS PS ZE NSZE PL PS ZE NS NLPS PS ZE NS NS NLPL ZE NS NS NL NL
0
ZENL NS PS PL
Example of membership functions
Disturbance
y(t)r(t) e(t)Fuzzy
controllerDynamic systemu(t)
Command OutputError
-
Control
d(t)

17Weakness of Mamdani-Type Fuzzy Control Philosophy
• Attempt to emulate or duplicate human control behavior• Basic problem
• premise: Human is good controller• fallacy: Human is very poor controller for complex, multivariable,
marginally stable dynamic plants• Fuzzy feedback controllers “work” for very simple SISO dynamic
systems where high precision is not required• mostly PI controllers (a few PID with a crisp channel)• no guarantees of closed-loop stability, stability-robustness and of
performance in presence of uncertainty• hard to extrapolate designs to new applications
99% of fuzzy feedback control applications deal with essentially1st or 2nd-order, overdamped, SISO systems

18Michio Sugeno Says....
• “Stability has been one of the central issues since Mamdani´s pioneering work. Most of the critical comments to fuzzy control are due to the lack of a general method for its stability analysis. We are still seeking an appropriate tool for the stability analysis of fuzzy control systems, though this situation is now improved......The success of fuzzy control, however, does not imply that we do not need a stability theory for it. Perhaps the main drawback of the lack of stability analysis would be that we cannot take a model-based approach to fuzzy controller design.”
• Reference: M. Sugeno, “On Stability of Fuzzy Systems Expressed by Fuzzy Rules with Singleton Consequences,” IEEE Trans. on Fuzzy Systems, Vol. 7, April 1999

19From Jenkins and Passino...
• Reference: D.F. Jenkins and K.M. Pasino, “An Introduction to Nonlinear Analysis of Fuzzy Control Systems,” J. Intelligent and Fuzzy Systems, Vol. 7, 1999
• “The fuzzy controller design methodology primarily involves distilling human expert knowledge about how to control a system into a set of rules. While a significant amount of attention has been given to the advantages of the heuristic fuzzy control design methodology .... relatively little attention has been given to its potential disadvantages. For example, the following questions are cause for concern
• will the behaviors observed by a human expert include all possible unforseen situations that can occur due to disturbances, noise, or plant parameter variations?
• can the human expert realisticaly and reliably foresee problems that could arise from closed-loop system instabilities or limit cycles
• will the expert really know how to incorporate stability criteria and performance objectives into a rule-base to ensure that reliable operation can be obtained?
• Authors advocate the use of Tagaki-Sugeno models with crisp stability criteria

20Shortcomings of Fuzzy Controller Methodology
e1
e2
en
u1
u2
um
MIMO Fuzzy
Controller
u1 h1(e1 ,e2 , ..., en )
u2 h2 (e1,e2 , ..., en )
.............
um hm (e1,e2 , ..., en )
• Fuzzy rules just generate nonlinear static functions
• Impossible to generate multidimensional “if-then” rule tables
• Cannot generate “differential equation” controller rules
• It is not easy to differentiate noisy sensor signals by finite differencing, as it is almost always done in fuzzy applications
• no utilization of dynamic (e.g. Kalman) filtering of sensor noise
• I have never seen a multiple-input multiple-output (MIMO) fuzzy control application using Mamdani-type methods
• combinatorial complexity for high-order and multivariable applications

21Challenge to Fuzzy Control Experts
• Observe only noisy position x(t)
• with broadband sensor noise
• Find force f(t) to relocate cart
• not just balance stick
• No static fuzzy rule-based system can solve this problem
• human cannot stabilize system with knowledge only of x(t)
• To change cart position and for inverted pendulum stabilization, the controller must be dynamic, i.e. it must implement “differential equations” from x(t) to f(t)
f(t)
xo x1x(t)
M
mM~m

22Why is Fuzzy Control Popular with the Masses
LEARNING FUZZY CONTROL
• Working pragmatic knowledge of fuzzy sets and membership functions ..... 1 week
• Working pragmatic knowledge of Mamdani method ..... 1 week
LEARNING CRISP CONTROL
• Differential equations ... 8 weeks
• Linear algebra ... 10 weeks
• SISO servos .... 14 weeks
• State space methods/stability theory ... 14 weeks
• Optimal control .... 8 weeks
• Multivariable robust control ... 14 weeks

23Takagi-Sugeno Fuzzy Control
• Approach developed to overcome criticism regarding closed-loop stability guarantees
• Approximate global nonlinear dynamics by “interpolating” linear state-space models with membership functions
• Design full-state feedback controllers for each linear model (using crisp control methods, e.g. LQR, H2, H, � etc.) and “interpolate” using membership functions• technique is inferior to that of “gain-scheduling”
• It is possible to use quadratic Lyapunov functions to obtain sufficient conditions for nominal stability• results are disappointing; at best applicable to low performance
systems• Current methodology does not address stability-robustness and
performance-robustness issues• Current methodology does not address output feedback requiring
dynamic compensator designs

24Recent References on Fuzzy Stability
• M. Sugeno, “On Stability of Fuzzy Systems Expressed by Fuzzy Rules with Singleton Consequences,” IEEE Trans. on Fuzzy Systems, Vol. 7, April 1999
• S.H. Zak, “Stabilizing Fuzzy System Models Using Linear Controllers,” IEEE Trans. on Fuzzy Systems, Vol. 7, April 1999
• M. Margaliot and G. Langholz, “Fuzzy Lyapunov-based Approach to the Design of Fuzzy Controllers,” Fuzzy Sets and Systems, Vol. 106, August 1999
• D.F. Jenkins and K.M. Pasino, “An Introduction to Nonlinear Analysis of Fuzzy Control Systems,” J. Intelligent and Fuzzy Systems, Vol. 7, 1999
• A. Kandel, Y. Luo,and Y.Q. Zhang, “Stability Analysis of Fuzzy Control Systems,” Fuzzy Sets and Systems, Vol. 105, July 1999
• Y. Tang, N. Zhang and Y. Li, “Stable Fuzzy Adaptive Control for a Class of Nonlinear Systems,” Fuzzy Sets and Systems, Vol. 104, June 1999

25Trends in Fuzzy Stability Studies
• Must have a (linear, nonlinear, multi-model,...) state-space model• Classical crisp stability theory results are applied
• Popov criterion• Circle criterion• Lyapunov stability theory• Linear Matrix Inequalities (LMI)• Bounded-input bounded-output (L2) stability theory
BIG QUESTIONIf a state space model is available why not usesuperior crisp design techniques that guaranteestability, stability-robustness, and performancerobustness?

26Takagi-Sugeno Models
• Start with R linear state - space models, each valid in a specific region Sk of Rn
Ý x (t)Ak x(t ) Bk u(t); k 1, 2,...,R; x(t)Sk
• Define R scalar valued membership functions, k (x(t)), 0k (x(t))1,such that
k (x(t))1if x(t) Sk
0 if x(t)S j for k j
linear int erpolationsotherwise
; let (x(t ))
1
R
1
k (x(t ))1
R
1 (x(t ))
R (x(t))
Global nonlinear model
Ý x (t ) Akk (x(t))k1
R
x(t) Bkk (x(t))
k1
R
u(t)
Almost impossible to define the
membership functions k (x(t)) for
high- dimensional problems
x1
x2
S1
S2
S3
SR

27Takagi-Sugeno Feedback Law
• For each linear plant, design full - state feedback gain matrices, typically by crisp
feedback methods (eigenstructure -assignment, LQR, H, etc.) of the form
Kk x(t), k 1,2,...,R.
• Generate global nonlinear feedback by interpolating with the same membership
functions
u(t) K j j (x(t))j1
R
x(t)
• Global closed- loop system
Ý x (t ) Akk (x(t)) Bkk (x(t ))k1
R
K j j (x(t))
j1
R
k1
R
x(t)
• Quadratic Lyapunov functions provide sufficient conditions for stability.
Find P 0 so P(Ak Bk K j ) (Ak BkK j )T P 0 for all j,k 1,2,...,R
i.e. all mismatched linear plant/linear gain combinations must be stable!!! This
seldom happens in high-performance designs.

28Set-Point Vs. Task-Based Control
• Prof. Zadeh asserts• crisp control theory only deals with set-point control; it cannot
handle task-based control• Fact
• hybrid control systems do provide the methodology for integrating task-based and set-point control

29Hybrid Control
DYNAMIC SYSTEM (PLANT)
CONTROLLER (COMPENSATOR)
Discrete-state system
Continuous-time system
• Architectures involving interactions between a finite-state event-driven system and a continuous-state continuous-time system
• Discrete level can establish different modes of operation (tasks) for feedback system

30Car Parking
x
y
.
x=Vcosy=Vsin =u
.
.
.R
L
u(t)
• Prof. Zadeh asserts that control theory cannot solve parallel parking problem
• Fact: Time-optimal solution using simplified dynamics is shown
• optimal control theory using more complex nonholonomic car dynamic model can also be used using arbitrary initial car location and orientation
• automated crisp solution can be implemented if customer is willing to pay the price

31Highway Driving
• Prof. Zadeh asserts that it will never be possible to construct an automated automobile driving system using conventional control theory
• FACT: Such a prototype system has been already been demonstrated by PATH on the I-5 freeway in San Diego including• longitudinal control with minimal inter-car spacing to triple freeway
lane capacity• lateral control (lane changing and lane-centerline following)• automated merging and demerging capabilities• using hybrid control methodologies• by some of Prof. Zadeh´s colleagues (Varayia, Sastry, Hedrick, ...)
at UC-Berkeley, among others• Most certainly the fatality rate of such automated highway systems will
be far less that those involving human drivers• Similar efforts are ongoing by Daimler-Benz in Europe

32Barriers to “Computing With Words”
• Prof. Zadeh advocates computing with words using fuzzy logic concepts• noble task; provides a foundation for a computational theory of
perceptions• What is not usually stressed is that such computations require the
solution of exceedingly complex equations in real-time• in June 1997 talk at the Portuguese Academy of Sciences, Prof.
Zadeh showed an example which illustrated that even simple “word computations” require solution of systems of complex nonlinear integro-differential equations
• such real-time computations are beyond capabilities of current and projected computers
• must wait for completely new computers with novel architectures and software

33Fuzzy Dynamical Systems
• Appropriate framework for capturing system uncertainty• References
• P.E. Kloeden, “Fuzzy Dynamical Systems,” Fuzzy Sets and Systems, Vol. 7, 1982
• Y. Friedman and U. Sandler, “Evolution of Systems under Fuzzy Dynamics Laws,” Fuzzy Sets and Systems, Vol. 84, 1996
• Y. Friedman and U. Sandler, “Fuzzy Dynamics as Alternative to Statistical Mechanics,” Fuzzy Sets and Systems, Vol. 106, 1999
• Must propagate the Possibility Density Function using Chapman-Kolmogorov integral equations• to solve these requires enormous computational power• feedback control system design using such Chapman-Kolmogorov
equations is extremely complex and its real-time computational requirements are astronomical

34Linear-Quadratic-Fuzzy (LQF) Optimal Control
• Formulation of standard LQ problem using
fuzzy membership functions for process
and measurement noise
x(t 1)Ax(t) Bu(t) Lw(t)
y(t 1)Cx(t 1) v(t 1)
J limT
1
2Tx T (t)Qx(t) uT (t )Ru(t )
k T
T
• Technical difficulties
(1). The conditional state membership function, given past observations,
involves the solution of nonlinear partial differential equations
(2). Min/max fuzzy arithmetic further complicates life
(3). Common membership functions are nondifferentiable
0
w
w
0
v
v

35The Numbers Game: So What?
• Prof. Zadeh claims that from 1981 to 1996 there are 15,631 INSPEC and 5,660 Math Reviews citations with “fuzzy”, and 2,997 INSPEC citations with “fuzzy control”
• There are at least 250,000 citations on Kalman filtering alone, and there must be several million citations on other aspects of “crisp” modern control theory
• Note that Modern Control Theory started in about 1959 and Zadeh´s seminal paper on Fuzzy sets was written in 1965

36The Numbers Game: Comparisons
• Prof. Zadeh credits Japanese with innovative insight to popularize fuzzy control applications and bring “fuzzy” commercial products into the marketplace• oriental vs western philosophy
• Numerical facts
• in December 1989 the Nikkei 225 was at 39,000• in December 1989 the Dow Jones was at 2,700
• on August 18, 1999 the Nikkei 225 was at 17,879• on August 18, 1999 the Dow Jones was at 10,991

37Fuzzy Applications
• Lot´s of “hoopla” about commercial applications (air-conditioners, washing machines, camcorders, ...)
• The innovation is adding special sensors/actuators and feedback to previously open-loop systems• even better performance would be obtained for the same
sensor/actuator architectures if engineers used crisp control methods
• Example: Phillips design for Mercedes CD player rejecting fuzzy control design in favor of H �-based one
It is time we moved from "voodoo engineering" into solid and respectable
science and technology, and
Prof. Zadeh should take a leadership role in this transition

38Crisp and Fuzzy Control Complement?
• Prof. Zadeh´s asserts: Fuzzy controls do not replace crisp controls, but they can complement each other
• Basic engineering problem: How does an engineer integrate a crisp and a fuzzy control design (and why???)
Disturbance
y(t)r(t) e(t)Fuzzy
controllerDynamic systemu(t)
Command OutputError
-
Control
d(t)
Disturbance
y(t)r(t) e(t)Crisp
controllerDynamic systemu(t)
Command OutputError
-
Control
d(t)

39My Dillema
• Without stability guarantees, Mamdani fuzzy controllers cannot be used for 3rd or higher order systems
• To obtain stability guarantees, even fuzzy control afficionados admit that they must use some nominal state space model for system dynamics for fuzzy control designs (Sugeno et al)• plus, lots of crisp tools (Lyapunov theory, circle criterion, Popov
criterion, linear quadratic regulators, pole placement, ...)• they still have to worry about unmodeled dynamics and uncertain
parameters• Given that a state space model is necessary, why bother to introduce
fuzzy ideas when conventional crisp control methods can deal with the design problem directly???• and, at the same time, address explicitly and directly disturbances,
sensor noise, model errors, performance specifications, nominal stability, robust stablity, and performance-robustness

40Optimal Control
• Used for determining best way of adjusting controls, as functions of time, such that system response is “optimal” (in well-defined sense) from any initial state
StateDynamics(continuous - time) :
Ý x (t) f x(t),u(t) ; x(to ) xo
Cost Functional : J(u)K(x(t f )) L x(t),u(t) to
t f
dt
StateDynamics(discrete - time) :
x(t 1) f x(t),u(t) ; x(0) xo
Cost Function : J(u)K x(T ) L x(t 1),u(t) t0
T 1

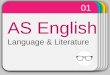
41An Example
• Old-fashioned F-4 aircraft
• Objective: Reach operational altitude in minimum time
• Shown is expected flight path
Range
Altitude60,000 ft
Conventional T=720s

42Surprise!
• If problem is highly nonlinear and/or there are several decisionvariables intuitive solutions are seldom optimal
Range
Altitude60,000 ft
Optimal T=332s
Conventional T=720s

43Optimal Control Theory
• Pontryagin maximum principle (1957) main theoretical tool for analyzing and solving optimal control problems• Extension of Kuhn-Tucker conditions in Nonlinear Programming
problems to dynamic case• Maximum Principle leads to numerical solution of Two-Point-
Boundary-Value (TPBV) problem to calculate• optimal controls vs. time• resulting optimal dynamic state trajectories and responses
• Several algorithms exist for solving TPBV problems

44Linearization, Gain-Scheduling
LM:1
LM:2
LM:3
LM:4
LM:k LC:1
LC:2
LC:3
LC:4
LC:k
Global Nonlinear
Plant
Global Nonlinear Dynamic
Compensator
Family of linear dynamic models Family of linear dynamic compensators

45MIMO Linear Feedback
+
-
r(s) e(s)K(s)
u(s)G(s)
+ y(s)
d(s)
+ n(s)
+
+
E(s)
++
Commands
Disturbances
Sensor noise
Nominal Plant
Model Errors
Compensator
Outputs
Controls
• Must design MIMO compensator to ensure stability and satisfaction of performance specifications
• Digital approximation of MIMO compensator solves in real-time high-order LTI differential equations

46Concluding Remarks
• Crisp control theory offers a powerful methodology for designing SISO and MIMO optimal and high-performance feedback control systems• extensive knowledge of theoretical developments required• quantitative modeling of plant, disturbances, specs. is essential• systematic prescriptive/normative approach to control design• leads to high-performance (high-gain, high-bandwidth) designs
• Fuzzy feedback control methods (Mamdani) are suitable for trivial control problems requiring low accuracy (minimal performance)• no training in control theory necessary• no models, no specifications, no guarantees• impossible to guarantee stability• empirical ad-hoc approach to design• leads to low-performance (low-gain, low-bandwidth) designs
Fuzzy control is a “parasitic” technology