Embed Size (px)
DESCRIPTION
FUZZY LOGIC CONTROL SYSTEM IN SHIP MANEUVERING FOR DEVELOPING EXPERT SEA TRANSPORTATION
Citation preview

ISSN 2085-1944 © 2009 ICTS
FUZZY LOGIC CONTROL SYSTEM IN SHIP MANEUVERING FOR
DEVELOPING EXPERT SEA TRANSPORTATION
Aulia Siti Aisjah 1, A A Masroeri
(2)
1 Engineering Physics Dept., Industrial Faculty of Technology, ITS
Jurusan Teknik Fisika , ITS, Gedung E Lantai II, 60111
[email protected] 2 Marine System Engineering Dept., Faculty of Marine Engineering
Jurusan Teknik Sistem Perkapalan, ITS, 60111
ABSTRACT
For achieving integrated modern sea
transportation, which is consist of rectifying of
shipping in according to traffic demand, regulate
of shipping management, saving in sea and also
expanding the industrial of designing of ship.
The one of this strategy is a designing ship
monitoring and control system for developing
safe in sea transportation. This paper propose a
designing expert control system which is
integrated with monitoring system for course,
position, tracking and ship maneuvering. The
system of controller is consist of controller
module, there are : (i) course controller, (ii)
position controller, (iii) speed controller, (iv)
control of avoiding collision, and (v) a controller
for rejection sea disturbance. In the early
research have done a designing module
controller for course keeping and tracking.
System designing base on fuzzy logical, in term
if ... then .... The module of fuzzy logic
controller (FLC) is composed some rules. These
rules are expressing the best rule, which is
achieved from the input and output another
controller that is LQG/LTR (Linear Quadratic
Regulator / Linear Transfer Recovery) controller
which is robustness performance. Composing
the rules are based from Sugeno Takagi
methods, in then ... action from least square
estimation. The good performance of FLC
design is showed in many simulations, like in
waves disturbance when the significant high is 3
meters, and the setting heading is 30o. The
response controller giving a settling time 279,34
seconds. Whereas in complex disturbance
(significant wave height is 3 meters), when
setting is fulfilling the dot point in early (0,0)
meter and target is (6000, 3465) meters, the path
error is 17,308 meters . The same strategy is
done at the controller proceed for the course
keeping in 30o (fulfilling the point (0,0) and
(6000, 3465) meters), the response of controller
giving the path error is 141,181 meters
Keywords: FLC, Sea Transportaion, course
keeping, maneuvering, monitoring,
tracking.
1 INTRODUCTION
Sea transportation needs of improving safe
in sea and efficiency of transportation, these are
most important. The program can be done for
increasing safety in sea and reducing sea
accidence, beside the regulation aspect, that is
the coordination for reducing accident, in writer
idea is “designing a control and monitoring
system in sea transportation. The integrated
monitoring and control system in ship, is needed
some unit controller, as a control of ship speed,
control of steering machine for course keeping
and track keeping, and also control for fulfilling
the trajectory and ship position. The monitoring
system have been doing from DGPS
(Differential Global Positioning System), this
component giving the information such as:
position and speed a ship in a few time, accurate,
cheap and in wherever, no depend on weather
season. The condition is needed for a good
controller is : (i) Having a stability
characteristics, a robustness performance and
giving response as desired (ii) Adaptive for the
changing the ship parameters and also from
disturbance environment (iii) Possibility
implementation in computer and other
supporting hardware.

ISSN 2085-1944 © 2009 ICTS
The weakness of former controller was
usually called a conventional system, in which
this system was coming from mathematical
models. The mathematical models is not capable
accommodate of all system condition is
controlled. In this matter, the controller is do
based on feedback information of sensors
(compass, gyrocompass), the specification
controller have not been doing in wide range,
especially in measurement variable is tend to
zero or tend to infinite. This condition is occur
when heading error, or path of error is least or
very big. But, this matter is surpass with a
controller that has been doing base on data base
management in real condition (the position,
heading, speed, ship trajectory), and data is
processed in numerically for construct the rules.
The rules are formed from real data, expertise, or
intuition of expertise. The output of controller
is a decision or action of controller such as the
position, speed, a path is recommended.
2. An Autopilot control system
An autopilot system in ship is occurring
when compass and gyrocompass is used in
maneuvering ship control. Some of invention the
models or control method in ship maneuvering,
as figure 1 below, that is classifying in four
methods : conventional, adaptive, modern and
expert methods.
2.1 Control System in Ship Maneuvering
A control system is used for moving the
ship steering as like as desire performance, and
many invention in this designing have been
trying in computer scale and also in minilab.
For example, is like tracking controller in un
predictable sea condition [Tee, Keng Peng, and
Ge, Shuzhi Sam, 2006, Velagic, J., et.al 2000].
This invention is conducted from former
researcher in expert autopilot.
Control systems at ship maneuvering based
on the technique designing, is distinguishable in
four methods (Aisjah, 2007). The conventional
method is a develop methods cause finding an
electrical gyroscope (Hopkins, 1980). And then
emerge a magnetic gyro compass which is
sensitive in magnetic noise. This founded is
support a close loop controller that is named
Metal Mike (Speery, 1911). Minorsky (1970)
was analyzing the PID controller, this invention
called the autopilot, whereas this designing
control system was SISO (Single Input Single
Output). The input of controller is deflection of
gyro compass and output is deflection of rudder.
The former researcher in Linear Steering
(Davidson and Schiff, 1946, Nomoto, 1957) and
Non Linear Steering (Abkowitz, 1964, Norrbin,
1970), have been given idea in SISO Minorsky
controllers.
Figure 1: The developing a system control design in ship
maneuvering [Aisjah, A.S, 2007].
The conventional designing was done by
some researchers simply meet many weaknesses.
It was not fully accommodate the existence of
high frequency disturbance, although it has been
adding band filter designed (Lozowicki and
Tiano, 2000). The environment disturbances
cause the changing of parameters controlled
system, and on this reason so appear an adaptive
controller. In the adaptive control system,
mathematical model like the one degraded in
modified, so the adaptive controller was
occurred. In this methods, the mathematics
models was modified from the conventional
method and becoming an equation with
accommodating the environment influence. This
modification mathematical model is expressed in
so many term, like MRAC (Model Reference
Adaptive Control) by Amorengen, V. (1970),

ISSN 2085-1944 © 2009 ICTS
Blanke, (1980) and ARMA (Auto Regressive
Moving Average) by Nejim (1998). The
proposed methods by Amorengen (1970)
showed non linear rudder by Amorengen, V
(1984) and he proposed a command generator
for obtained certainty model parameters. While
in Nejim structure showed the capability of
controller when the changing of service ship
speed.
The invention of computer, cause happen
the growth in designing of modern control
systems. Where in designing this modern control
systems, mathematical models of maneuvering
dynamics is expressed in the state space
equation. Modern technique was proposed by
Bertin (1980) with strategy ILQ (Inverse Linear
Quadratic) and Kijima (2003), H2 by Donha
(1998), LQG (Linear Quadratic Gaussian) by
Bertin (1998), H~ by Strand (1998) and also
Consegliere (2002), MPC (Model Predictive
Control) and LQR (Linear Quadratic Regulator)
by Wahl et al (1998).
2.2 Fuzzy Logic Controller in Ship
Maneuvering
Fuzzy logic theorem was found by Zadeh
in 1965. This theorem imitate logic of human
common sense in decision making at matters,
and simply can be applied in controller at
various households products for example
washing machines, room refrigerating machine,
rice cooker and others. The application of fuzzy
logic is not only growth in usage in this field, but
also at some industrial in Japan which have put it
from the beginning 1980’Th. And so do in
maneuvering system which have been proposed
by Noguchi and Mizoguchi (1998) from
Ishikawa Jima - Harima Heavy Industries, where
maneuvering is majored for safe path of ship.
The position variable and safe positions of ship
expressed as fuzzy variable. In the simulation is
shown of ship maneuver performance with fuzzy
logic can avoid existence of other ship.
Vukic et al (1998) designed of fuzzy logic
control at maneuvering system by two ways that
are using 2 fuzzy inputs and 3 fuzzy inputs. This
mechanism developed by Aisjah, et al (2004),
input of the FLC is 3 that is yaw and error yaw
divide in 7 areas of fuzzy membership function.
The FLC worked based on the output of PI
controller (Proportional - Integral). In the
simulation applied at Mariner class ship with
first order of Nomoto. Ability of Vukic FLC’s
by 3 inputs it was better in so many condition
compared with Aisjah , et al (2004). Based on
that performance the result hereinafter developed
by Aisjah, et al (2005a, 2005b, 2005c, 2006a) in
designing of robust controller, through model of
system in state space equation. This way apply
to get obtain detail analysis from internal
character of good ship dynamics controller in or
without disturbances. Lee, et al (2004) developed FAM (Fuzzy
Associate Memories) of FLC which compiled
based on expert information and experiment at
real condition. Fuzzy Controller is applied in
measuring of heading, yaw rate, relative speed’s
to desire ship position (location and heading) in
yield output control on the expected course.
Input controller is relative ship position offset to
expected, heading errors, yaw rate, projection of
vector distance’s from center gravity to expected
position, projection of relative speed to the
expected position. The developing of FAM in
FLC based on experiment result as have done by
Lee et al (2004), would affect to the capability of
control systems, when ship operating in other
condition. This problem is anticipated by Aisjah,
et al (2005c, 2006b, 2006c), developing of FAM
based on output of robustness control systems
that is a LQG/LTR controller. The LGQ/LTR
controller is capable to overcome the external
disturbances. A fuzzy control system’s is more simple in
rule base was proposed by Vukic, et al (1998), as
extending from FLC of Velagic, et al (1998).
This FLC uses 49 rules for output. The input of
controller is yaw error and yaw rate. The
membership function of error yaw and yaw rate
are triangular while output of signal of controller
(command rudder) is trapezoid function. And
then Omerdick, et al (2000) developed Vukic, et
al (1998) same in their rule base, whereas the
inference is Mamdani method’s and adding band
filter. The object of Omerdick, et al (2000) in
Mariner class ship, the length is 160.93 meters

ISSN 2085-1944 © 2009 ICTS
and service speed’s is 15 knots. The simulation
implemented by entering the environment
disturbances, the waves in Pierson - Moskowitz
spectrum, modal frequency is 1 rad/sec, and sea
current is 1’st order Gauss Markov. The Notch
filter is use for shafting waves. The performance
of control systems is settling time - Ts time is
less than 150 seconds, at the set point 10o and
30o. While in disturbances, the response of
Vukic FLC’s is fluctuations.
Development of rules using Sugeno-Takagi
algorithms, which are expressed in mathematic
equation as a function of all input variables. This
rule based is coming from least square
estimation from the relation of input and output
LQG/LTR as a reference control. The input of
LQG/LTR controller is yaw error and yaw rate,
while the output is signal command rudder. The
mechanism like this was designed by writer, and
simulation giving a good performance for
developing a module controller in “monitoring
and control transportation system”.
3. Fuzzy Logic Controller – FLC for
Developing Expert Sea Controller
Transportation.
3.1 The Development Sea Transporttion The sea models transportation is compose
with other system such as monitoring and
control system. This paper is proposes a
designing expert monitoring and control that is
integrated one and other. The expert system is
using fuzzy logic.
Designing a Monitoring system
In monitoring system, is a system is done as
a monitor for position, speed, course and the
trajectory of ship, in the specify shipping area.
The information is coming from monitor station
with GPS as a navigation system using satellite.
GPS receiver is obtained a signal from satellites
in earth orbiting. The mechanism of a system
designed is: GPS will give information about
position and the time. From two data can
calculate the speed and heading of ship, and then
continuing information to Monitor Station. The
data are storage in Monitor Station and then for
processing the controller.
Designing a Expert Controller
The second subsystem is a fuzzy logic
controller, the output this system is information
about the heading, position, trajectory and speed
of ship. These information as a recommended for
collision avoiding with other ship. This
information is send to Controller Station and can
access by user in ship.
Figure 2: Diagram block of Monitoring and Control System
The parameters are influence in designing
control system:
1. The architecture of control system
design.
2. Parameters in ship dynamic :
environmental disturbances (ocean)
The architecture of system will be design as
drawing in following figure.
Figure 3: Fuzzy Control system architecture
In the figure 3, is shown at Fuzzy Logic Control
architecture in this designing, there are
parameters are needed in this controller:
A. Information from sensors (heading / yaw
angle, yaw rate, position, ship speed)

ISSN 2085-1944 © 2009 ICTS
B. GPS Information (position of other ship
/ other foreign body)
C. Parameters for developing Fuzzy Logic
Controller.
a. Fuzzy Sets Classifying
The mechanism for classifying a danger area
(possibility collision) is done using grouping
horizontal zone as suitable with ship heading (o).
This grouping is like infollowing table.
Table 1: Description of grouping horizontal zone
Base on GPS information can taken to be
account for distance (d) between ships or to
other ship. The value of d in linguistic term,
there are: very close, close and far, or in other
term, such as: in front, behind, right and left. The
output of fuzzy I (figure 2) is a decision about a
possibility accident. In the logic value are : the
Front Zone Accident (FZA), Back Zone
Accident (BZA), Left Zone accident (LZA),
Right Zone Accident (RZA), and related with
confidence factor : Not possible (NP), Possible
(P) and most possible (MP). The confidence
factor is in a numerical value. The occurrence
accident is taken account in suitable rules, for
example in the following rule:
R: If di is (LD(k)
) Then cj is (LC(k)
) (1)
Where: k is amount of rules, di is a distance (is
accounted from GPS information), LD:
linguistic variable in the D set: (Very Close,
Close, and Far), ci: direction of accident (the
angle of heading collision, from compass
measurement), and LC is a C set variable = is
(Not Possibly, Possibly and Most possibly).
And then to grouping a danger zone
(possibly occur a collision), d is a distance to
other ship in fuzzy variables, and weighting
value of accident collision is determined from
result a verification data.
b. A module avoiding collision This module control is processes for
avoiding collision with other ship / other foreign
vessels, is navigation free of collision. The goal
of the controller design is a target course; this
course is a new course of ship. The rule is
needed in this module for reducing heading error
until to zero, which is the difference of target
and actual heading.
Variables Input module is:
(i). Possibility accident (LC) in linguistic
variable (NP – not possible, P – possible,
MP – most possible).
(ii). Error of yaw (Heading error) is
expressed in linguistic variable (LB –
Left Big, L – left, LS – left small, Ze –
zero, RS – right small, R – right, RB –
right big).
The output of module are two kinds, there are:
(i). The changing of heading / course (dψ) is
expressed in linguistic variable : (LF –
left fast, L – left, LS – left slow, Ze –
zero, RS – right slow, R – right, RF –
right fast).
(ii). Surge velocity (u) is expressed in
linguistic variable (S – slow, N – normal
F – fast).
The example of avoiding collision rule is
expressed:
If cj is LC(k)
And ψ is Lψ(k)
Then dψ is
LDψ(k)
and u is Ldu(k)
(2)
Where : k is amount of rules, cj is kind of j
accident, ψ is heading error, u is surge
velocity, LC, Lψ, LDψ and Ldu are
expressed in linguistic variables of cj, ψ, Dψ
and du. The k’th rule in mathematical
expressed is a relation fuzzy R(k) to C x ψ,
in domain fuzzy membership function :
µR(k)
(cj, ψ) = min[µLC(k)
(cj), µLψ (k)
(ψ)] (3)
The whole of rule base are expressed in a
union from all of individual rule:

ISSN 2085-1944 © 2009 ICTS
µR(cj, ψ,dψ, u) = K
k
j
k
R c1
)(),(
(4)
The output of navigation is expressed in
term:
),,,(
),,(minmax),(
*
,
*
udc
cud
jR
jAND
cNav
j
(5)
Where: ,*
jAND c is a combination from
input and output? udc jR ,,,
c. A Control module ship dynamics
In this module are composed two modules: there
speed control module and heading control
module.
Figure 4: Sub system a speed controller
Input speed control module are (i) a distance to
other ship (Zero, Close, Far, very far) , (ii) Surge
velocity (Slow, Normal, Fast), (iii) Surge
velocity target (Slow, Normal, Fast) and (iv)
Heading error ((Fast_Astern, Slow_Astern,
Dead, Slow_Ahead, Fast_Ahead).
One of those rules for speed controller is
expressed in this term:
If (distance is far) And (Surge_velocity is
Normal) And (Target_Surge_velocity is
Normal) And (Heading_error is Normal) Then
(RPM_of_propeller is Slow_Ahead)
(6)
d. Heading or Course Controller
In sub system heading controller, the input for
module is heading error (the difference of desire
heading to actual heading / yaw angle). The
environment factor as disturbance (wave, sea
current and wind) will influence heading error.
The third disturbance factor will be modified
heading error, the changing of yaw rate and
distance to target point. The third inputs module
are expressed in linguistic variables : _Heading
error (NB - Negative Big, N – Negative, Z –
Zero, P – Positive, PB – Positive Big), Yaw rate
(Ne - Negative, No - Normal, Po - Positive), and
distance (Z – Zero, C – Close, F - Far).
Output of heading controller is two kinds, there
are: the voltage of thruster and rudder angle, are
expressed in linguistic variable (B – Negative
Big, N – Negative, Z – Zero, P – Positive, PB –
Positive Big). And rule of two inputs in this
module is shown by:
If (Heading_Error is Positive) And (Yaw rate is
Normal) And (distance is Far) Then
(Thruster_Voltage is Positive) And
(Rudder_Angle is Positive).
(7)
Figure 5. Structure of diagram block a Monitoring and Control
system for designing expert transportation
e. Control for reducing disturbance The disturbances are commonly from
environment will be considered: wind, ocean
current and waves. In general the third
disturbances will influence heading of ship.
Analyzing those disturbances is derived in value
and angle of coming from every disturbance
[Aisjah, A.S, 2007]. In the assumption that
waves is wind generated, so in the future module
design just on two disturbances, there are wind
and ocean current. In these control modules,
there are two position fuzzy controller, target to
Xo and Yo. Inputs of controller are ship
position, target position, Euler angle, wind
speed, wind angle, velocity current and current
angle. Projection of current and wind will

ISSN 2085-1944 © 2009 ICTS
influence of dynamic and surge velocity and also
drag effect. The output of this controller is rpm
propeller and thruster voltage.
3.2 Designing a Course and Path Control
Module.
Mechanism of FLC designing
The mechanism in fuzzy logic control
systems yielding a decision (signal controlled)
through some steps, which are fuzzification,
mechanism in inference engine, and
defuzzification (Jamshidi, 1993. In
defuzzification is a function to change a crisp
variable becomes fuzzy variable by expressing in
the membership function. This membership
function of universe discourse is analogous to
level of probability marginal from the variable
(Aisjah, et al, 2005d). Many researches in
designing a fuzzy control systems use triangular
function, because a simple easy to represent in
numerical variable (Kosko, 1997).
In Fig.7, Fij is fuzzy set, ci is real
parameter, yk
is output of systems in rule R(l)
, M
is amount of fuzzy rules. From those rules, in
the part of IF in the form of fuzzy set, while part
of THEN is crisp value, is linear combination of
input variable. Sugeno - Takagi fuzzy control
systems is shown in Figure 7. The x is input
variable, y is output variable that is result of
Sugeno - Takagi inference, w is available
weighting factor from iteration of simulation.
L(1) : IF x1
is F11 and … and … x
n is F
n1 THEN
y1 = c01 + c
11 x
1 + … +c
n1 x
n
LM) : IF x1
is F1
Mand … and … xn is F
nM THEN
yM = c0
M + c1
M x1 + … +c
nM x
n
Weighting
averageUx Vxy )(
w1, y1
wm,ym
Figure 6. Configuration of Sugeno-Takagi Fuzzy Logic Systems
(Wang, 1994).
Model reference (LQG/LTR) is applied to
derive and evaluate of FLC performance. Input
of LQG/LTR controller as a reference controller
is yaw error and yaw rate is applied to obtain
unknown parameters cij1 and cij
2 which for rule
base at FLC. At early model reference is
implemented beforehand precede KLF, to obtain
the both value cij through least square estimation,
and then FLC is implemented separately without
LQG/LTR.
Structure of FLC controller device consist
of two units, in first unit based on yaw error (e)
and yaw rate (r) input, second FLC unit working
based on normalization of path error. FLC
structure in this research is different from other
structure when it is used a Mamdani inference
function. At the time Mamdani inference is
applied, some robustness parameters of
controllers are not met. When simulation is done
in some condition like as such as circle
maneuver, the fluctuations is appear in complex
environment condition. The error of radius circle
maneuvering is ±20% and tends to not
convergent (Aisjah et al, 2006d).
To determine rule base of fuzzy controller
which applied is as follows:
21 duduu d (8)
in which
krckecdu ijijij
211 (9)
δd is a command signal rudder, cij1 is a gain
signal controller that is based on change of error
yaw, cij2 is gain a signal controller that is based
on yaw rate, du2 is output of controller that is
based on normalization path error η. To obtain
the gain in equation of (9), it is done using estimation least square.
Input of 2’nd FLC unit is normalization of
path error d, and output of controller is du2.
When d is negative hence du2 is negative, and so
do on the contrary if d is positive, the value of
du2 is positive. The available rule for this logic
can be expressed as a form (10).
.tanh2 sdu (10)
S is sensitivity of FLC in which its input is η.
In Figure of (8) is showing a diagram
block of controller structures which is designed

ISSN 2085-1944 © 2009 ICTS
in this research. Mechanism of FLC that is input
is yaw error (e) and yaw rate (r). In the course
keeping simulation, output of FLC signal control
is du1 feeding to steering machine and steering
machine is moving ship as according to heading
setting. If simulation is done by setting heading
from position objects, hence FLC works with
input yaw error ( e), yaw rate (r) and path error
and output of FLC signal controller is du1 + du2.
This signal is moving steering machine and then
the rudder will move ships towards the expected
position.
Way
point
desire
(xd, yd)
Course
desire
Offset from
desire path
Yd
Fuzzy
Autopilot
Offset Path
Autopilot
du1 = c1 e + c
2 r
du2 = tanh
(s)
Steering
Machine
Ship
Dynamics
c
LQG/LTR
Controller
Ship Dynamics
Compas
Giro
CompasGPS
Yd+
-
Yr
Y
r
x,y
Disturbance
FLC Based LQG/LTR
Figure 7. Diagram block of Sugeno – Takagi FLC with LQG/LTR as a model reference for heading and tracking control
Table 2 Range of error yaw, yaw rate, path of error and output of
controller.
Table 3 Notation usage in gain FLC controller
The value of cij, i = 1 … 5 and j = 1..5 are
obtained from least square estimation from
output of LQG/LTR controller.
4. Simulation
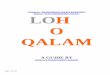
4.1 Course Keeping Simulation At accomplishment of course keeping
(heading is constant), controller will work if d ~
0, here just 2’nd FLC unit is active. The goal of
fuzzy controller is bring a ship to the desire
angle of yaw / heading the expected, in this

ISSN 2085-1944 © 2009 ICTS
case when Δψ = ψd – ψ = 0. 1’st unit of FLC is
active with input e and r, 2’nd unit of FLC is
off, and then action of controller is du1 which is
signal of command rudder δc = du1. At course
keeping simulation is done by giving signal
testing in the form of step function as an input
of control systems. The first simulation, set
point of heading is 30o and done at UN
disturbance condition. The result of simulation
like seen at Figure of 9 for Mariner class and
Figure 10 for Tanker (100000 - 350000 dwt).
Seen at both, the settling time (Ts) when set
point heading is 30o in LQG/LTR controller is
141.3 second and 117.8 second in FLC. While
Ts of Tanker (100000 - 350000 dwt) is 379.3
second (FLC) and 410.9 second (LQG/LTR).
This value is better than result of LQR
controller ( Aisjah, et al, 2006b).
The performance of controller in time
domain, in general marked in parameters:
maximum overshoot (mov), settling time (Ts),
rise time (Rs), steady state error (ess). These
parameters give a stability character of a
controller. Though those parameter are not one
kindness of a controller performance. To get a
stability parameter like those, by the way of
through giving a certain testing signal and
comparing the result of the response to this
signal testing. With test signal can be analyzed
mathematically and experimental from a
control systems.
Heading Response Mariner Class Ship
___ LQG/LTR
___ FLC
Figure 8. Heading response of Mariner class ship when setting
point is 30o in UN disturbance condition
Figure 9. Heading response of Tanker (100 000 – 350 000 dwt)
when setting point is 30o in UN disturbance condition
A first system order is expressed in the
transfer function as following:
Ts
K
sR
sC
1)(
)( (11)
Which is K is gain of system, T: time constant
of system, C: output of system and R: input of
system (Ogata, 1992). The response of control
systems in some vessel types of level could be
determined of time constants system. The way
for finding this time constant by when it
reached 63.2 % from heading target, this time is
a time constant of system (Ogata, 1992). For
Mariner class ship, the length is 161.9 meters,
and service speed is 7.72 m/sec and Tanker
(190000 dwt) is 304.65 meters , 8.24 m/sec, the
time constant of both type vessels are 107,89
seconds and 289.82 seconds.
4.2 Track keeping Simulation At track keeping simulation (path
accomplishing), the goal of fuzzy logic control
systems is bring ship from actual position
towards to path desired.
If the ship in left side from the path
expected that is the value of η > 0. This
means required a signal command rudder is
positive yielding transformation of positive
direction. Signal of du2 will have + and will
boost up a signal command rudder, and then
cause ship direction (angle of yaw) is bigger
than which expected for a few moment. At
this impulse of ship towards to the expected
orbit, so that d will go down towards 0.

ISSN 2085-1944 © 2009 ICTS
a
Mov = 31.4o Steady 29. 65 - 30. 34o
b
Mov = 39 . 7o
Muv = 27 . 3o Steady 28 . 75 - 31 . 8o
c
Figure 10. The response of Mariner class ship, in setting heading is 30o in wave disturbance wind generated, (a) Hs = 1 m
(b) Hs = 2 m (c) Hs = 3 mIn the opposite, when the
value of η < 0, in which the ship in the right
side of desired path, with symmetrically in the
rule at η > 0, so the value of du2 is negative and
reduce to a signal command rudder, so be
reducing the course of ship.
If ship in desired path the value of η = 0, in
this case du2 = 0, fuzzy autopilot will active
in such yaw error and yaw rate. This
mechanism is called course keeping
controller...
The input of control system is dot series
of desired position (xi,yi). In simulation in
which is input is (0,0) meters and (3465, 6000)
meters in where this point as a linear tracking
is suitable with heading is -30o. In below figure
is shown a position of actual and desired path
ship, when in complex disturbances. The value
of significant height wave are 1,2 and 3 meters,
velocity of sea current is 1 – 3 m/sec.
(3465,6000)
(0,0)
desire
actual a
a
bc=30o, gw=30
o
Figure 11 Trajectory of Mariner Class in complex disturbances,
setting point position is initial is (0,0) meters and target (3465, 6000) meters, Hs = 1 meters.
desire
actual (3465,6000)
(0,0)
a
ab
b
bc=30o, gw=30
o
Figure 12 Trajectory of Mariner Class in complex disturbances,
setting point position is initial is (0,0) meters and target (3465,
6000) meters, Hs = 2 meters.
desire
actual
Yd
a
a
b
b
bc=30o, gw=30
o
Figure 13 Trajectory of Mariner Class in complex disturbances, setting heading is -30o Hs = 1 meters.
In their two different mechanism in course
control and tracking control, in which
trajectory of ship moving as shown in fourth
above figures. If the setting of controller is
heading target, the 1’st unit of FLC is active,
whereas setting of controller is position of
desired path, 1’st and 2’nd units of FLC are
active. The different of those mechanism
proceeds error of the actual positions to
desired target. In figure of 11 and 13, zoom of
a and b location, the distinct of path when

ISSN 2085-1944 © 2009 ICTS
setting in controller is heading -30o, result of
error bigger than in which is setting controller
is point target. The error when just 1’st unit of
FLC is active and the both are active is shown
in table of 4.
desire
actual
Yd
a
b
a
b
bc=30o, gw=30
o
Figure 13 Trajectory of Mariner Class in complex disturbances, setting heading is -30o, Hs = 2 meters.
Table 4 Error performance of FLC result at the heading and tracking set point.
5. THE CONCLUSION From result of simulation, are result
conclusions
The developing an expert control system in
sea transportation is is done for fulfilling
trajectory, position and avoiding collision.
The Sugeno – Takagi FLC controller giving
good performance at turning, this is marked
by gain of Nomoto from simulation result is
tend to same with result from the
calculation.
FLC controller with Sugeno- Takagi
consequence function giving good
performance when turning and tracking in
wave disturbance.
The Sugeno Takagi FLC is follow a
LQG/LTR robust controller, this is could be
seen in trajectory response in turning and
also tracking.
REFERENCES
[1] Aisjah, A.S., Soegiono, Masroeri, AA.,
Djatmiko, E.B., Wasis and Sutantra, I.N.,
(2004), “ Linear Tracking Sea Vehicle based
on Fuzzy”, Proceeding Seminar National
Pasca Sarjana ITS.
[2] Aisjah, A.S., Soegiono, Masroeri, AA.,
Djatmiko, E.B., Wasis , Sutantra, I.N and
Buda, K., (2005a), “The extended of Tracking
Control Sea Vehicle based on Fuzzy Logic”,
Proceed. Seminar National FTI ITS.
[3] Aisjah, A.S., Soegiono, Masroeri, A.A.,
Djatmiko, E.B. ,Wasis, Sutantra I.N. and
Buda, K., (2005b), “A Study of Extended
Fuzzy Logic Control for Ship Maneuvering
Based on LQG/LTR Control”, Proceeding
Seminar National FTI ITS.
[4] Aisjah, A.S., Masroeri, A.A., (2005c),
“Extended Fuzzy Logic Control for Ship
Maneuvering Based on LQG/LTR Control”,
International Seminar ISME – Japan.
[5] Aisjah, A.S., Soegiono, Masroeri, AA.,
Djatmiko, E.B., and Wasis, (2006a), “Robust
Control Systems in Ship Maneuvering from
Wave, Sea Current and Wind disturbances”,
Journal Kelautan FTK – ITS.
[6] Aisjah, A.S., Soegiono, Masroeri, AA.,
Djatmiko, EB., and Wasis, (2006b), “The
robustness of Fuzzy Logic Controller in Ship
Maneuvering from Stochastic Disturbances”
, Seminar Pasca Sarjana ITS.
[7] Aisjah, A.S., and Masroeri, AA., (2006c),
“Fuzzy Logic Control of Type Sugeno Takagi
with The Model Reference of LQG/LTR at
Maneuvering Ship Controller”, International
Seminar JSPS.
[9] Aisjah, A.S., Soegiono, Masroeri, A.A.,
Djatmiko, E.B., Wasis and Sutantra, I.N. ,
(2006d), “Stability Area of Ship Maneuvering
using Fuzzy Logic Control”, Seminar National
Teori dan Aplikasi Tekn. Kelautan VI, FTK
ITS.
[10] Aisjah, A.S., Soegiono, Masroeri, A.A.,
Djatmiko, E.B., Wasis, dan Sutantra, I.N. ,
(2006e), “Smart Controller in Ship
Maneuvering”, Jurnal T. Kelautan, FTK ITS.
[11] Aisjah, A.S., Soegiono, Masroeri, A.A.,
Djatmiko, E.B., Wasis, D.A, dan Sutantra, I.N
, (2006f), “The Impact of Sea disturbances in
Ship Maneuvering Controller”, Seminar
Nasional Teknik Fisika FTI ITS.
[12] Aisjah, A.S., Soegiono, Masroeri, A.A.,
Djatmiko, E.B., Wasis, D.A, dan Sutantra, I.N
, (2007a), “The LQG/LTR Controller as a
Reference of Fuzzy Logic Controller in
Mariner Class Vessel.”, Jurnal GEMATEK
STIKOM Sby.

ISSN 2085-1944 © 2009 ICTS
[13] Aisjah, A.S., Soegiono, Masroeri, AA.,
Djatmiko, E.B., Wasis, D.A, dan Sutantra, I.N
, (2007b), “FLC Sugeno – Takagi in
Maneuvering of Mariner Class Vessel”,
Jurnal Industri, Vol. 6 No. 2, 2007.
[14] Berge, S. K., Ohtsu, K. dan Fossen, T. I.,
(1998),“Non Linear control of Ships
Minimizing The Position Trackings Errors”,
IFAC Conference CAM’S 98, Fukuoka Japan.
[15] Bertin, D., (1998), “Track Keeping Controller
for a Precission Manoeuvring Autopilot”,
IFAC Conference CAMS’98, Fukoka, Japan.
[16] Breivik, M. dan Fossen, T.I., (2004), “Non
Linear Robust Maneuvering and Positioning
Control os Ships in extreem situation” ,
www....
[17]Bretscneider, C.L., (1969), “Wave and Wind
Loads. Section 12 of Handbook of Ocean and
Underwater Engineering.”, Mc. Graw Hill,
New York.
[18] Consegliere, A. dan Lopez, M.J., (2000), “H∞
Controller Tuning Method for Ship Autopilot”,
5th IFAC Conference on Manoeuverring and
Control of Marine Craft, MCMC 2000,
Aalborg, Denmark.
[19] Fossen, T. I., (1994), “Guidance and control of
ocean vehicle”, , John Willy & Son.
[20] Kosko, B., (1997), “Fuzzy Engineering”,
Prentice Hall.
[21] Lee, S. M. dan Kyung, K., (2004), “ A Fuzzy
Logic for Autonomus Navigation for Marine
Vehicles Satisfying Coldreg Guidelines”,
International Journal Control and System, Vol
2 No. 2.
[22] Lozowicki, A.dan Tiano, A., (2000), “On the
Design of a High Precission Ship Track
Keeping System”, 5th IFAC Conference on
Maneuvering and Control of Marine Craft,
MCMC 2000, Aalborg, Denmark.
[23] Minorsky, N., (1922), “Directional Stability of
Automatic Steered Bodies”, Journal America
of Naval Enegineers, No. 34 Vol 2.
[24] Moyano, E., Lopez, E., and Velasco, F.J.,
“Track Keeping Autopilot”, Proceeeding 5th
International Conggres on Maritime
Technological Innovations and Reserach, 21 –
23 November 2007, Barcelona. [25] Omerdick, E., dan Roberts, G.N., (2004), “A
fuzzy track – keeping autopilot for ship
steering’, Journal of Marine Engineering and
Technology, Vol. A2.
[26] Perez, T. dan Blanke, M. , (1998),
“Matehematical Ship Modelling for Control
Application”, Technical Report – Dept. Of
Electrical and Computer Engineering , The
University of NewCastle, Australia, Section of
Automation at Oersted DTU, Technical
University of Denmark, Lyngby Denmark.
[27] Triantafyllou, M. S. Dan Hover, F.S., (2004),
“Manoeuvering and Control Marine
Vehicles”, Dept. Of Ocean Engineering,
Massachusett Institute of Technology, www...
[28] Velagic, J., Vukic, Z. dan Omerdick, E.,
(2002), “Adaptive Fuzzy Ship Autopilot for
Track Keeping”, www. Elsevier.com.
[29] Velagic, J., Vukic, Z. dan Omerdick, E.,
(2000), “Adaptive Fuzzy Ship Autopilot for
Track Keeping”,5th Conference on
Maneuvering and Control of Marine Craft,
MCMC 2000.
[30] Vukic, Z., Omerdic, E. dan Kuljaca, L., (1998),
“Improved Fuzzy Autopilot for Tracking
Keeping”, IFAC Conference CAMS’98,
Fukuoka Japan.
.