Embed Size (px)
Citation preview
1
An Algorithmic and Systematic Approach for Improving Robustness of TOA-based
Localization
Yongcai Wang, Lei Song
Institute for Interdisciplinary Information Sciences (IIIS), Tsinghua University, Beijing, China
in EUC2013, Nov.13, 2013
2
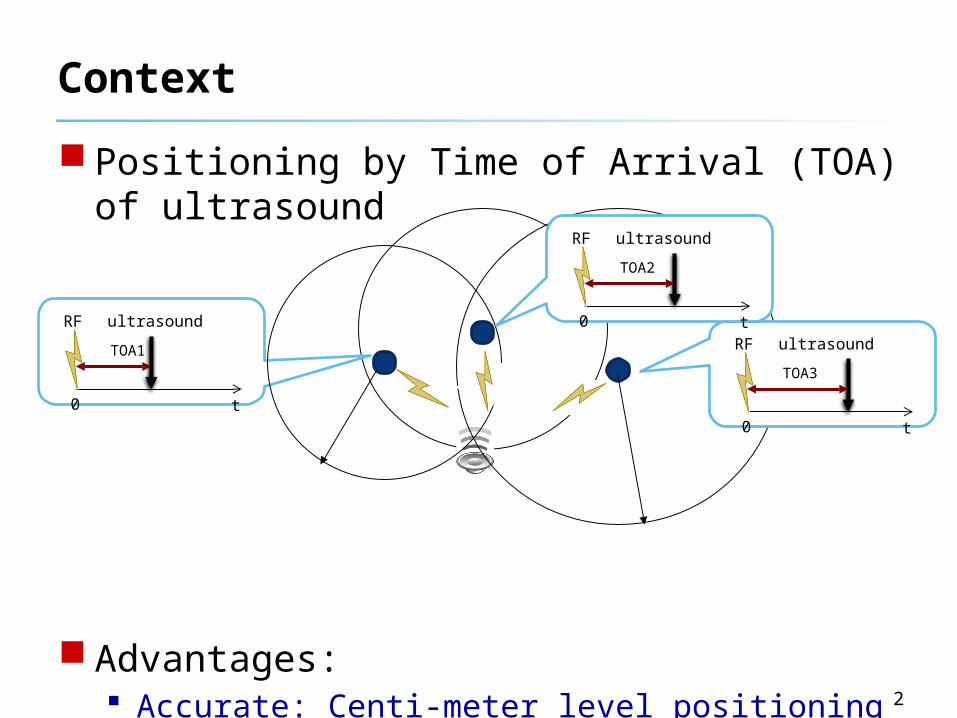
Positioning by Time of Arrival (TOA) of ultrasound
Advantages: Accurate: Centi-meter level positioning accuracy Safe: user-imperceptible Low cost: US transducers are cheap (around 10 RMBs).
Context
ultrasoundRF
TOA1
0 t
ultrasoundRF
TOA3
0 t
ultrasoundRF
TOA2
0 t
3
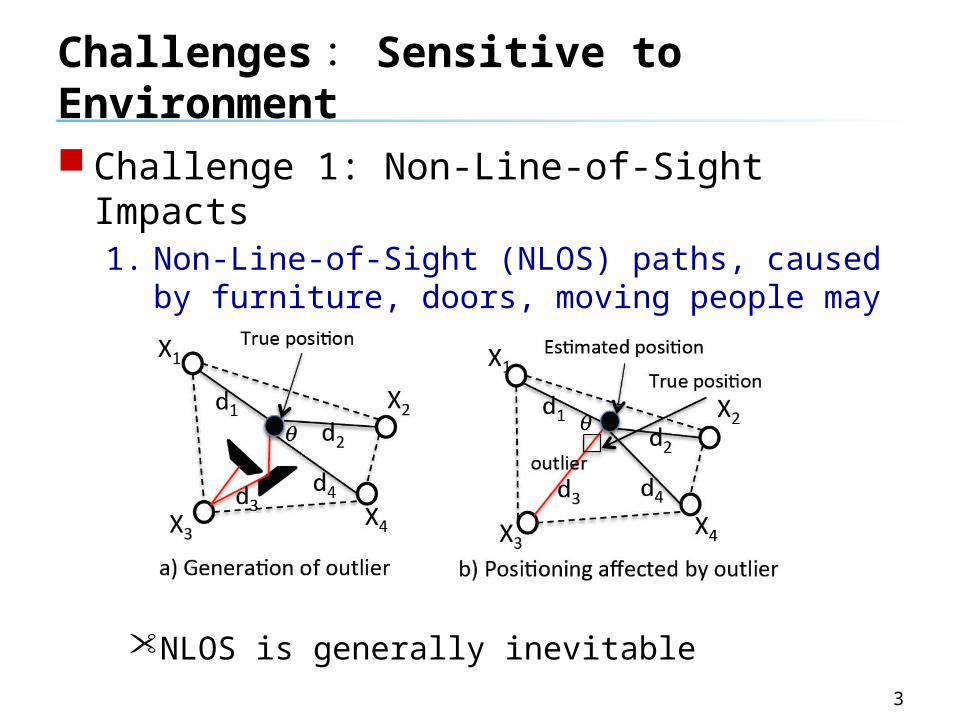
Challenges: Sensitive to Environment
Challenge 1: Non-Line-of-Sight Impacts1. Non-Line-of-Sight (NLOS) paths, caused by furniture,
doors, moving people may lead to large positioning error.
NLOS is generally inevitable
4
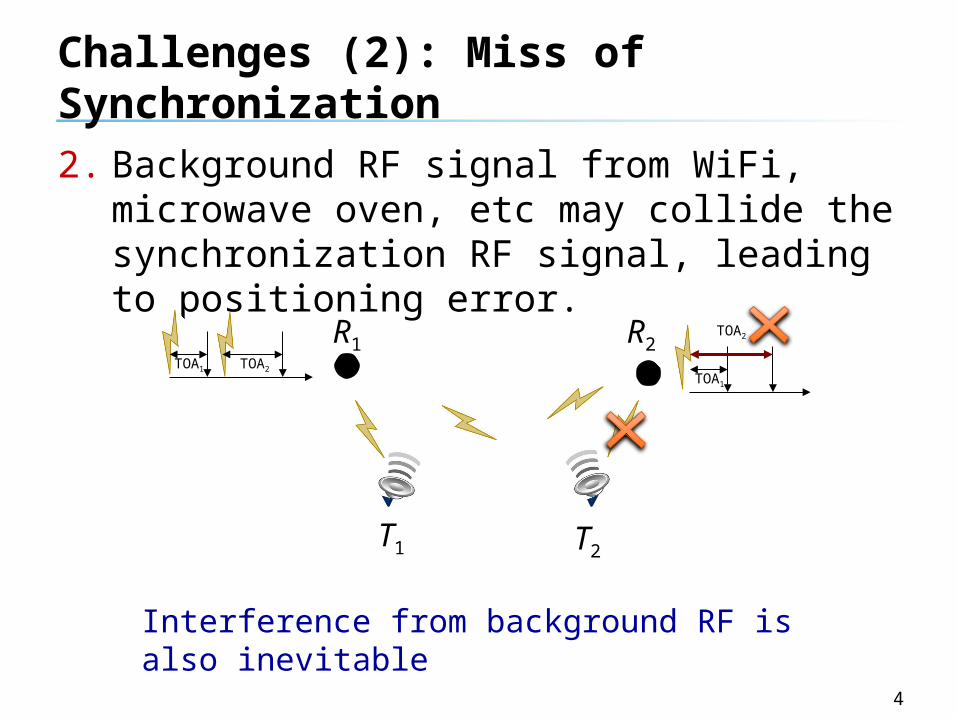
Challenges (2): Miss of Synchronization
2. Background RF signal from WiFi, microwave oven, etc may collide the synchronization RF signal, leading to positioning error.
T1 T2
TOA1
TOA1
TOA2
TOA2
Interference from background RF is also inevitable
R1 R2
5
Our Work
We show NLOS outlier detection problem is NP-hard.
We developed COFFEE, an iterative clustering, voting and filtering algorithm to detect NLOS distances.
First-Falling-Edge robust time synchronization
A prototype of Dragon system which implements COFFEE and First-Falling-Edge time synchronization.
6
1. NLOS Outlier Detection Problem
N beacons with known coordinates
N beacons take N distance measurements:
m of the distances are NLOS outliers: m<N/2
NLOS detection Problem:
To detect the m outliers among the N distances.
7
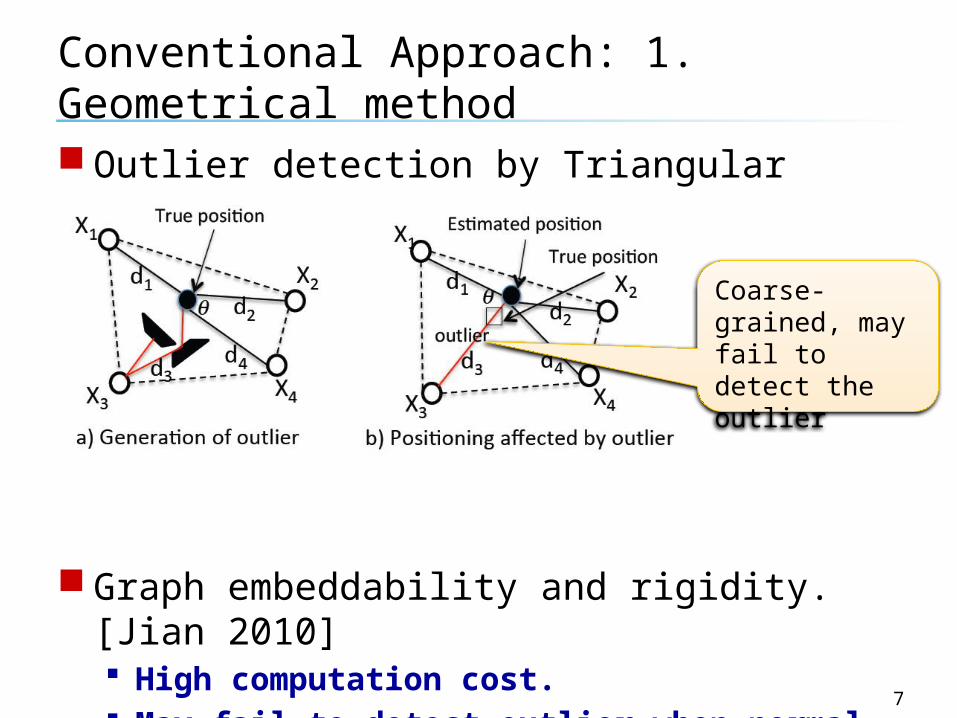
Conventional Approach: 1. Geometrical method
Outlier detection by Triangular Inequality [zhao2008].
Graph embeddability and rigidity. [Jian 2010] High computation cost. May fail to detect outlier when normal ranging distances
have noises.
Coarse-grained, may fail to detect the outlier
8
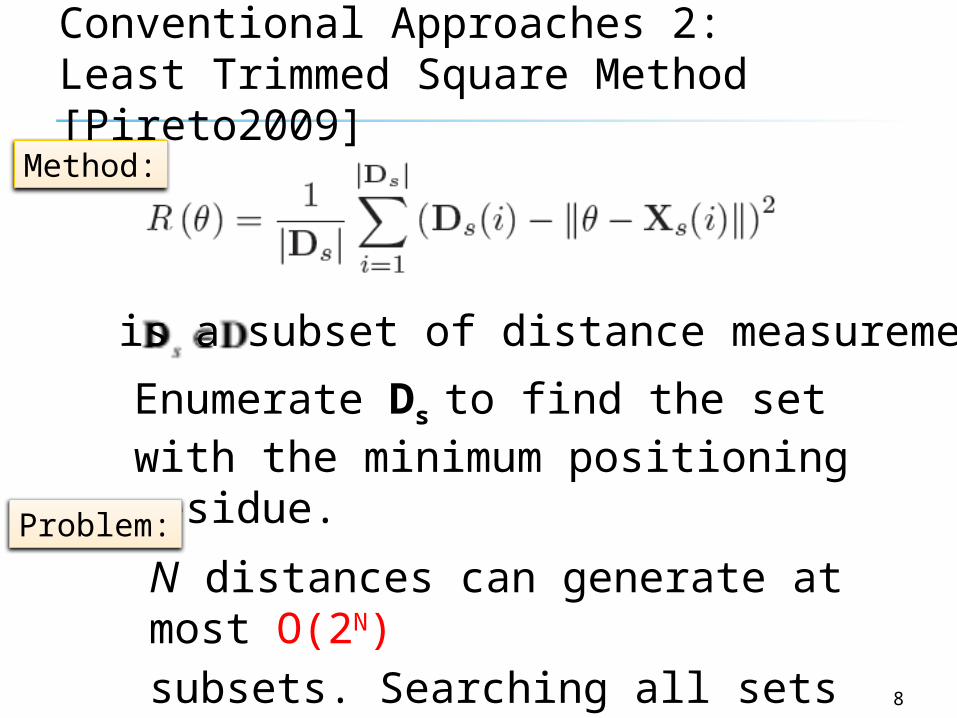
Conventional Approaches 2: Least Trimmed Square Method [Pireto2009]
is a subset of distance measurements
Enumerate Ds to find the set with the minimum positioning residue.
N distances can generate at most O(2N)
subsets. Searching all sets needs high computation cost
Problem:
Method:
9
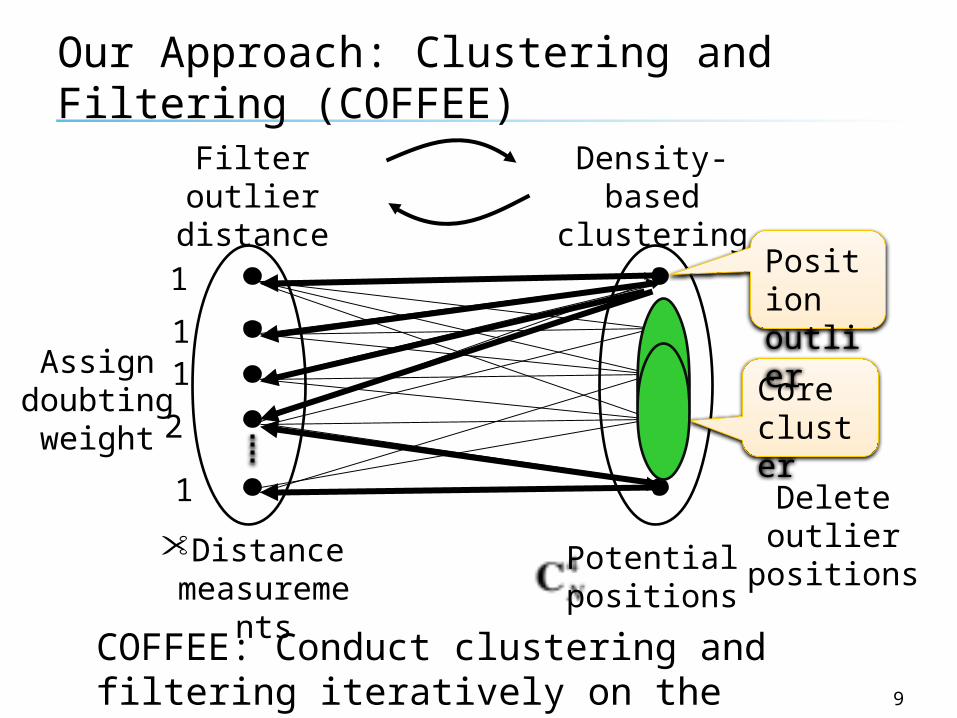
Our Approach: Clustering and Filtering (COFFEE)
Distance measurements
Assign doubting weight
Potential positions
Density-based clustering
Core cluster
Position outlier
1
11
2
1
Filter outlier distance
Delete outlier positions
COFFEE: Conduct clustering and filtering iteratively on the bipartite graph
10
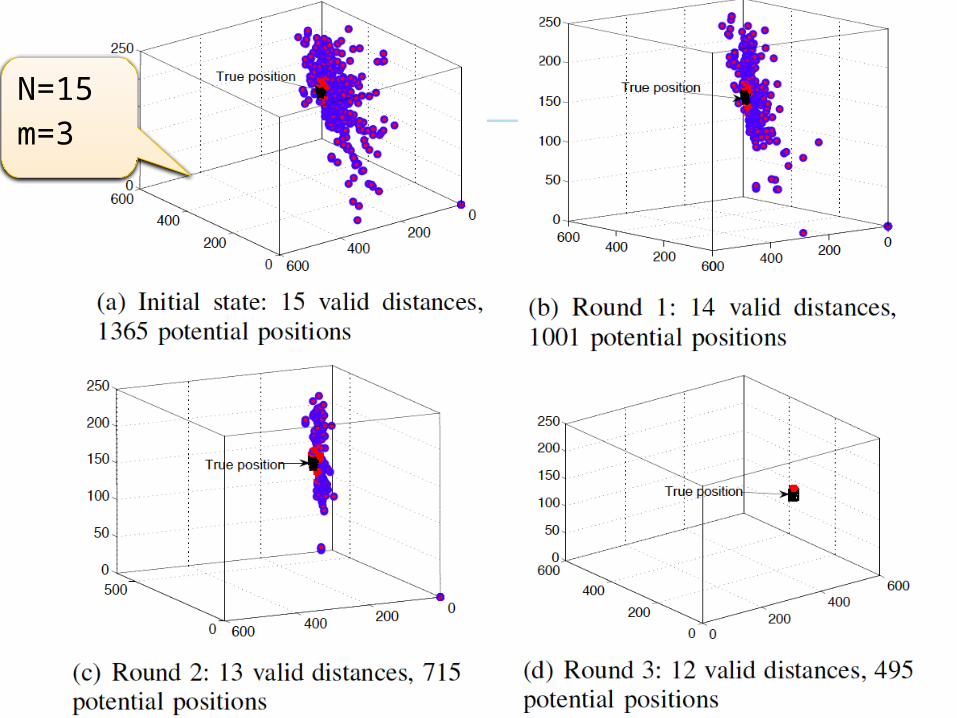
N=15m=3
11
Algorithm Properties
Convergence speed Detect m distance outliers in m iterations.
Complexity N4logN
12
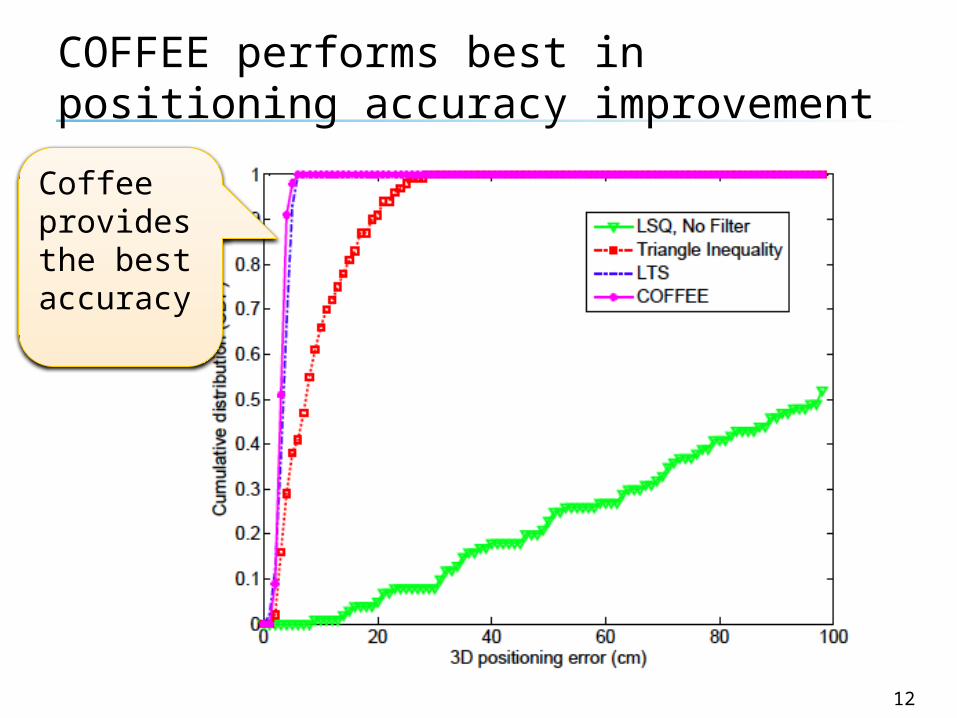
COFFEE performs best in positioning accuracy improvement
Coffee provides the best accuracy
13
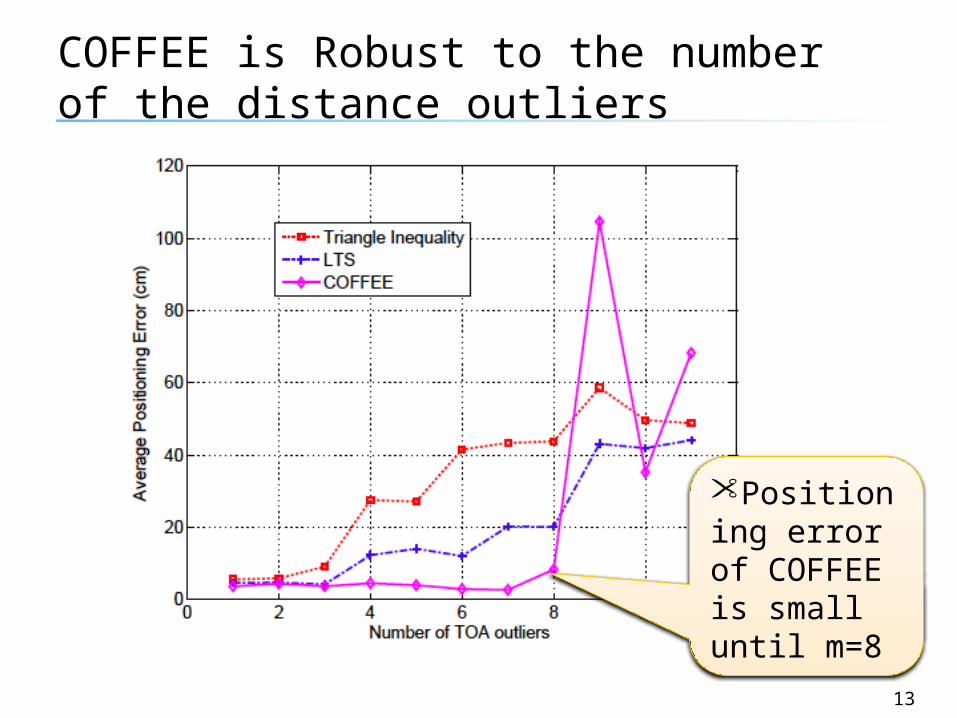
COFFEE is Robust to the number of the distance outliers
Positioning error of COFFEE is small until m=8

14
2. First-Falling-Edge Time Synchronization
A hardware type design Using a sync-line to connect all the receivers (beacons)
All receivers can be synchronized only if one receiver detects the synchronization RF signal.
15
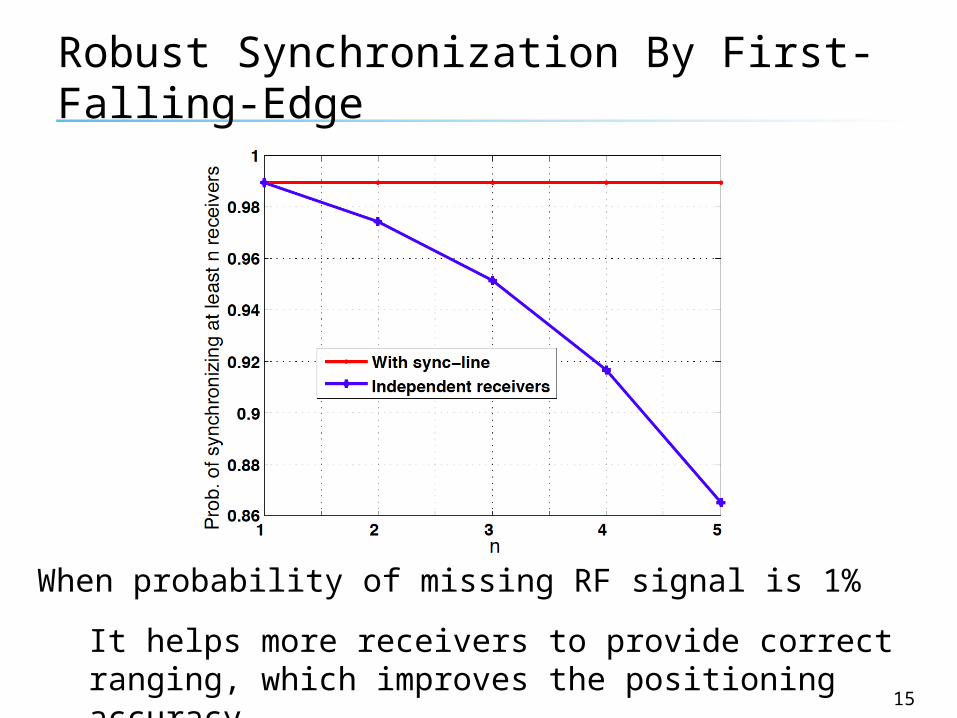
Robust Synchronization By First-Falling-Edge
When probability of missing RF signal is 1%
It helps more receivers to provide correct ranging, which improves the positioning accuracy.
16
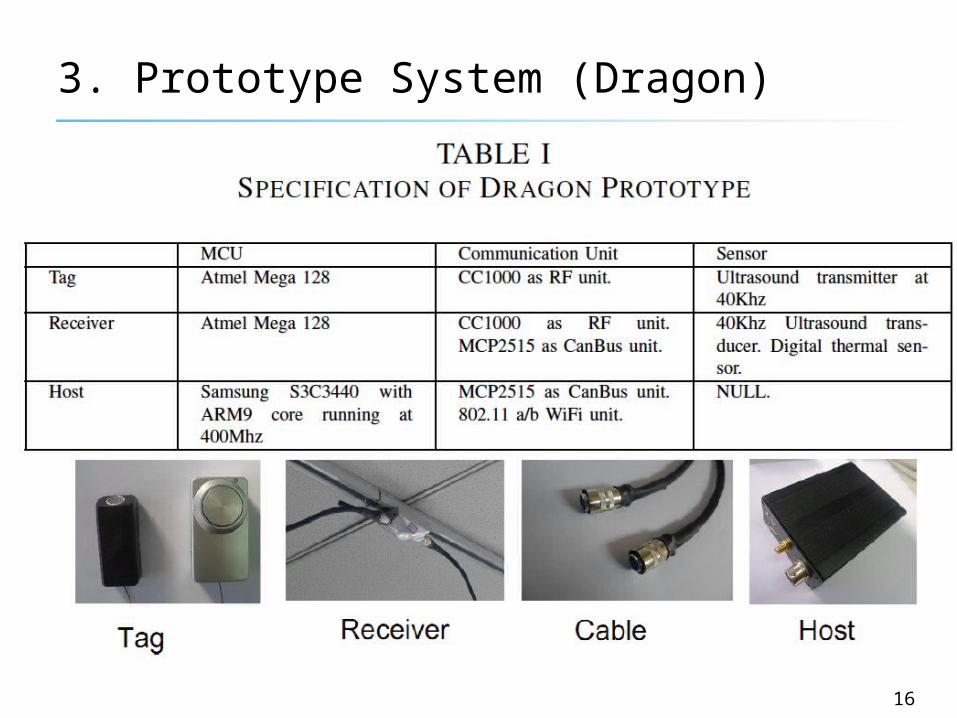
3. Prototype System (Dragon)
17
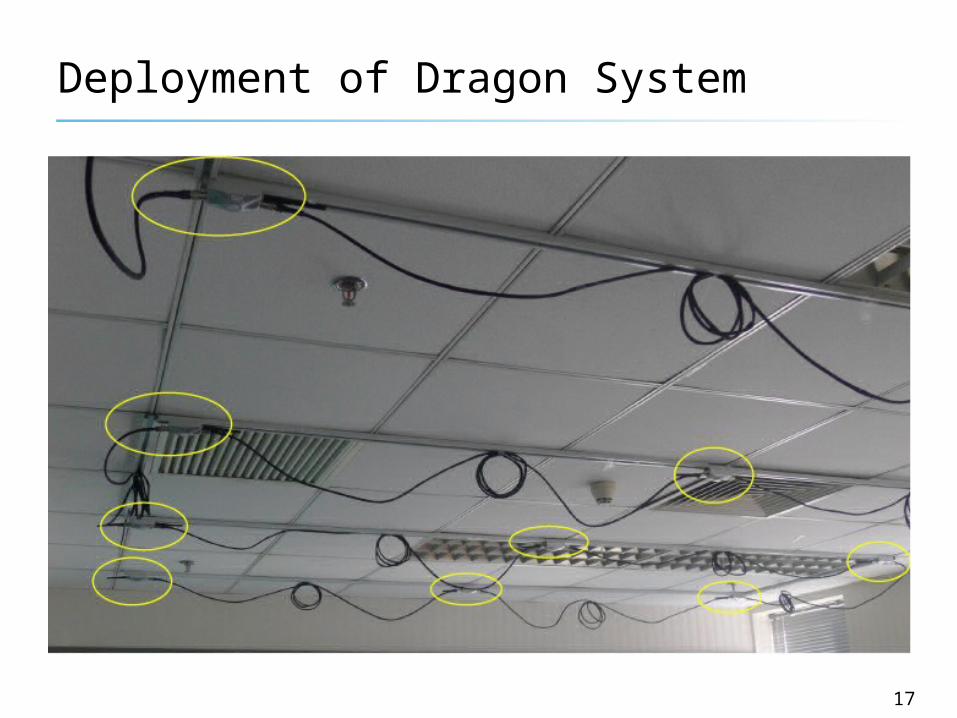
Deployment of Dragon System
18
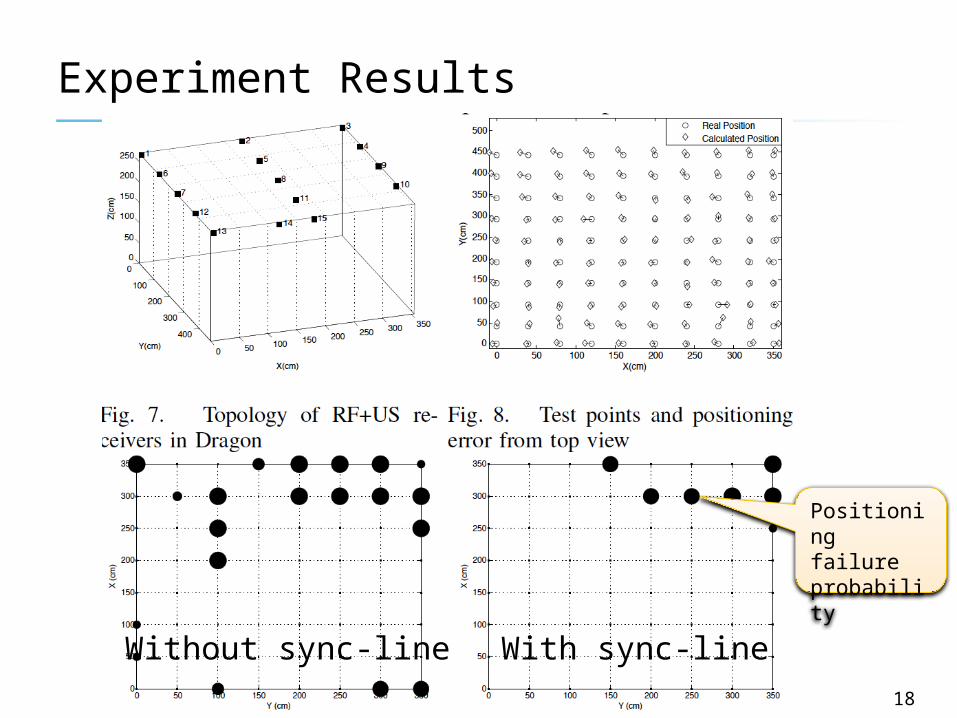
Experiment Results
Without sync-line With sync-line
Positioning failure probability
19
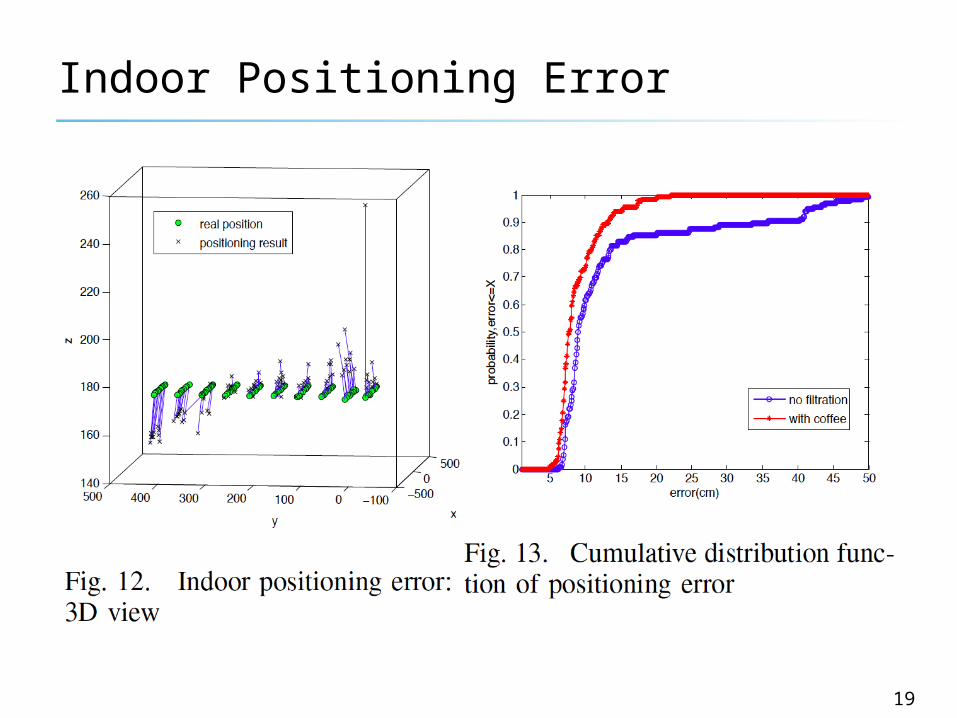
Indoor Positioning Error

20
Reason of Positioning Error in Dragon
The ranging error caused by angle
21
Conclusion
We proposed COFFEE, an efficient clustering and filtering algorithm for NLOS outlier detection. Accurate Low complexity Robust to the number of distance outliers.
First-Falling-Edge time synchronization improves the time synchronization probability effectively.
We developed a prototype of Dragon system, which verified the effectiveness of above designs.
22
Thanks a lotFor your patience
Visit my homepage for further information
http://iiis.tsinghua.edu.cn/~yongcai
![world.toagroup.com...the natural world and is very effective in creating a country style. TOA Prairie TOA TOA TOA 851B TOA C] TOA 12 04 Make you feel like adventures in Africa. with](https://img.pdfslide.us/doc/110x75/5f0a99557e708231d42c6c3c/world-the-natural-world-and-is-very-effective-in-creating-a-country-style.jpg)