Embed Size (px)
Citation preview

11
The GPS Software-Defined Receiver(a.k.a., the software radio)
Michael S. Braasch, Ph.D., P.E.
Associate Professor of EE
Avionics Engineering Center
Ohio University

22
Overview
• GPS Ranging (time-of-transmission, etc)
• Spread-Spectrum Review
• Traditional GPS Receiver Operation
• Limitations of the Traditional Design
• Software Radio Fundamentals
• GPS Software Radio Advantages
• The Road Ahead…

33
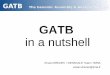
Signal is TransmittedFrom the Satellite
t
t
Signal is Received by the User
(A)
(B)
MSB:98010306Not to Scale
A: Signal is Transmitted at Time = TOT
B: Signal is Received at Time = TOR
TOT TOR

44
Spread-Spectrum Signal

55
Spread-Spectrum Ranging
• The pseudorange is given by the speed-of-light times the difference of time-of-reception and time-of-transmission: PR = (TOR-TOT)*c
• When the signal is received, the receiver looks at its own clock to mark the TOR
• TOT is encoded by the satellite onto the signal through the navigation (NAV) data and the pseudorandom noise (prn) code

66
Spread-Spectrum Ranging (cont’d)
• Time-of-transmission (TOT) is decoded from the signal by synchronizing a copy of the prn code (generated within the receiver) with the code which is in the received signal
• This synchronization is achieved by exploiting the properties of the correlation function of the prn code
• R() = c(t)c(t+)dt

77 MSB:98010301
Not to Scale
1
(a)
(b)
1
N- 1 N
1
1
-1
-1

88
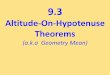
Traditional Spread-Spectrum Tracking
• The correlation function is an even function of code offset
• As a result, one does not know if the locally-generated code is too early by a certain amount or too late by the same amount
• In a traditional receiver, tracking is achieved through the use of a so-called delay-lock loop (DLL)

99 MSB:98010302Not to Scale
(b)
+ d 2
- d 2
RE ( ) RL( )
(a)
D ( ) = RE( ) - RL ( )
- d 2
+ d 2
-d d
d-d

1010
MSB:98010307
FromA/D Converter
90
Commands FromMicroprocessor
CarrierNCO
Delta-rangeAccumulator
Q Sample Processing(Same as for I)
3-bit Shift Register
L P E
Accumulate& Dump
Accumulate& Dump
Accumulate& Dump
1E
P
L
ToMicroprocessor
Commands FromMicroprocessor
CodeNCO
PRN CodeGenerator
Time-of-TransmissionRegister
1
1

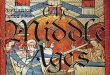
1111
Pre-amp
1 2RF Front
End
31 4
ClocksLO and Clocks
LO
Interrupts!
Analog-to-Digital
Converter
Hardwareand
Software Signal
Processing
Pseudoranges,delta-ranges,carrier-phase,
navigationdata
NavigationProcessing Position,
Velocity,Time,
Fault Detectionand Isolation
External Sensors(INS), Loran-C
Barometric Altimeter)
FrequencySynthesizer
ReferenceOscillator
1: Single-frequency designs process L1 (1575.42 MHz) signal only;Dual-frequency designs process L1 and L2 (1227.6 MHz) singals
2: Several types available: Single-bit (hard-limiting), Multi-bit, Adaptive thresholds
3: Single-channel designs sequentially process each satellite tracked;Multi-channel designs multiplex the A/D output into parallel channels with each tracking separate satellites
4: Integration of GPS and external sensor data may occur outside of the GPS receiver
MSB:98010304Not to Scale
1Antenna

1212
Limitations of Traditional Receiver Design
• Signal processing is performed exclusively in the time-domain
• Frequency and other transform-domain processing techniques are not possible
• Phase and delay-lock loop tracking techniques are cursed with the noise vs. dynamic tracking error trade-off
• In general, any kind of block-data processing techniques are not possible

1313
Software Radio Fundamentals
• NO DEDICATED DIGITAL HARDWARE PROCESSING ! ! ! ! !
• Flexible baseband processing through the exclusive use of software
• Computational Speed versus Flexibility trade-off:» ASIC: great speed; zero flexibility
» Desktop PC: low speed; great flexibility
» FPGA’s, DSP’s: in-between

1414
GPS Software Radio Advantages
• FFT-based signal acquisition• Signal Quality Monitoring (correlation function
analysis, etc)• Interference detection and mitigation via
spectrum estimation/time-frequency estimation• Frequency domain tracking (looking towards
total elimination of the feedback loops)• Deep GPS/INS integration• Yet-to-be-discovered block-processing
applications

1515
Ohio University Version 0.1

1616
Raw Data from the A/D Converter

1717
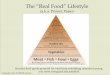
Spectrum of Raw Input Signal

1818
Energy Detector vs. Code Offset

1919
Energy Detector vs. Code/Freq

2020
Frequency Offset vs. Time

2121
Pseudorange (partial) vs. Time

2222
Carrier-phase vs. Time

2323
The Road Ahead…
• To date, most of the advantages of the GPS software radio concept have been applied to signal acquisition
• Novel tracking algorithms (such as frequency-domain approaches) are just now being explored
• Interference detection and mitigation
• Joint time-frequency estimation
• Deep GPS/INS integration
• Other block processing techniques

2424
Contact Information
Michael S. Braasch, Ph.D., P.E.
Ph: 740-593-0105
Fax: 740-593-1604
Email: [email protected]
Curt Cutright
Ph: 740-597-1316
Email: [email protected]