Embed Size (px)
Citation preview

1
03CFIOR – Robotica
Problem Set #3
Introduction This Problem introduces the use of the Matlab Robotics Toolbox (MRT), by Peter Corke
http://petercorke.com/Robotics_Toolbox.html
The User Manual (UM) is available at the 03CFIOR Robotica course homepage.
The first robot: 2R planar manipulator MRT adopts the standard DH conventions, as written here
This matrix is built in denhart.m in Libreria_Cinematica function T = denhart(d,teta,a,alfa) % Uso: T = denhart(d,teta,a,alfa) % % Costruisce la matrice omogenea T (4x4) associata alla % trasformazione da un riferimento a quello contiguo % secondo le convenzioni di Denavit-Hartenberg

2
% con parametri d, teta, a, alfa % Nota: gli angoli alfa, teta sono in gradi, d e a sono in metri % % B Bona, DAUIN, POLITO T = eye(4); calfa = cosd(alfa); salfa = sind(alfa); cteta = cosd(teta); steta = sind(teta); T(1,1) = cteta; T(1,2) = - steta*calfa; T(1,3) = steta*salfa; T(1,4) = a*cteta; T(2,1) = steta; T(2,2) = cteta*calfa; T(2,3) = - cteta*salfa; T(2,4) = a*steta; T(3,2) = salfa; T(3,3) = calfa; T(3,4) = d;
Now we follow the introductory example in the UM
where the manipulator is the simple one illustrated here

3
Create a pair of link objects
Create a robot
4
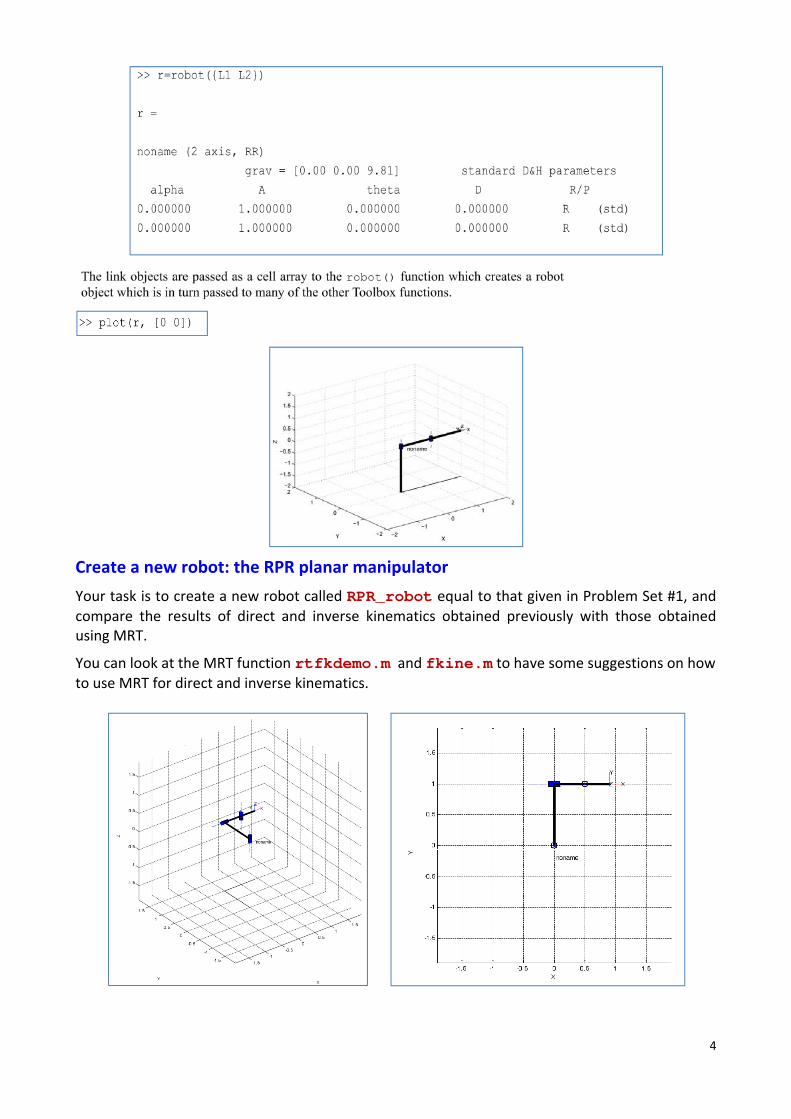
Create a new robot: the RPR planar manipulator Your task is to create a new robot called RPR_robot equal to that given in Problem Set #1, and compare the results of direct and inverse kinematics obtained previously with those obtained using MRT.
You can look at the MRT function rtfkdemo.m and fkine.m to have some suggestions on how to use MRT for direct and inverse kinematics.

5
Soluzione File utilizzati
RPR_robot.m
Risultati
# 3D 2D
1
2

3
4
5
6
6








![Robot Dynamics & Control - University of Queenslandrobotics.itee.uq.edu.au/~metr4202/2013/lectures/L4-Dynamics.v1.pdf · 4 16-Aug Robot Dynamics & Control ... Denavit Hartenberg [DH]](https://img.pdfslide.us/doc/110x75/5a8794817f8b9a882e8dbf53/robot-dynamics-control-university-of-metr42022013lecturesl4-dynamicsv1pdf4.jpg)




















