Upload samael-ruiz
View 1.048
Download 87
Embed Size (px) 344 x 292 429 x 357 514 x 422 599 x 487
Citation preview
Chapter 3 - Forward Kinematics: the Denavit-Hartenberg Convention
Denavit-Hartenberg Convention - Ki??isel Sayfalarkisi.deu.edu.tr/.../Denavit-Hartenberg_Convention.ppt · PPT file · Web view2017-03-21 · Denavit-Hartenberg Convention Denavit-Hartenberg
Denavit hartenberg convention
Virtual Reality: History Curs 6 Modelare procedurală, Virtual-Humans, Modelare audio, Denavit–Hartenberg
Kinematics – Frame Assignment using Denavit-Hartenberg Convention
Denavit-Hartenberg Parameterization of Euler Angles
Advanced Robotics - CMPcmp.felk.cvut.cz/cmp/courses/PRO/2010/Lecture/PRO-2010-Lecture-04... · 59 R. S. Hartenberg and J. Denavit, “A kinematic notation for lower pair mechanisms
Industrial Robots : Manipulators, Kinematics, · PDF fileThe Denavit-Hartenberg Notation Matrix ... Denavit-Hartenberg Matrix is a transformation matrix from one coordinate frame to
Three Dimensional Manipulators and Denavit Hartenberg ...robots.iit.edu/uploads/2/5/7/1/25715664/mmae_540_-_lecture_3_-_out... · Three Dimensional Manipulators and Denavit ... •What
FORWARD KINEMATICS: DENAVIT-HARTENBERG CONVENTION · DENAVIT-HARTENBERG CONVENTION ... the relationship between the individual joints of the robot manipulator and the position …
AUTOMATED NON-DESTRUCTIVE EXAMINATION OF … · (Denavit–Hartenberg) kinematic coefficients for the robot and additional degrees of freedom [Ref 4] Figure 4: Typical robotic NDE
Kinematic and Dynamic Analyses of the Stanford/ JPL Robot Hand · Denavit-Hartenberg parameters in the following equation: 14 . i-lT a position and orientation in frame i to the same
Prof. Alessandro De Luca - uniroma1.itdeluca/rob1_en/09_DirectKinematics.pdf · Prof. Alessandro De Luca Robotics 1 1 . Kinematics of ... J. Denavit and R.S. Hartenberg, “A kinematic
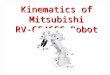
Kinematics of Mitsubishi RV-6S/6SC Robot. Kinematic model of Mitsubishi RV-6S/6SC ( Denavit-Hartenberg convention ) R. S. Hartenberg and J. Denavit, “A
FORWARDKINEMATICS:THE DENAVIT-HARTENBERG CONVENTION
Lecture 4: Kinematics: Forward and Inverse Kinematics · Lecture 4: Kinematics: Forward and Inverse Kinematics • Kinematic Chains • The Denavit-Hartenberg Convention • Inverse
Prof. Alessandro De Luca - · PDF fileJ. Denavit and R.S. Hartenberg, “A kinematic notation for lower-pair mechanisms based on matrices,” Trans. ASME J. Applied Mechanics, 23:
Kinematic Analysis of the Parallel Robot of Type 3UPE-RPU · cinemático, emplea el método de Denavit & Hartenberg para estudiar los brazos y los ángulos de rotación de Euler para
Robotics TOOLBOX - University of Missourivigir1.ee.missouri.edu/~gdesouza/Research/CSIRO/robot.pdf · 2006-08-09 · must know which kinematic convention your Denavit-Hartenberg parameters
Introduction to Robotics...Kinematic Equations - Denavit-Hartenberg convention Introduction to Robotics I withi−1R i beingorthogonalandorthonormal r2 11 +r 2 21 = 1 (7) r2 32 +r
FORWARD KINEMATICS: THE DENAVIT-HARTENBERG
FORWARD KINEMATICS: DENAVIT-HARTENBERG · PDF fileDENAVIT-HARTENBERG CONVENTION In this chapter we develop the forward or configuration kinematic equa- ... In the D-H representation,
konkuk.ac.krkonkuk.ac.kr/~cgkang/courses/robotics/courseMaterials/DHpaper.pdf · DENAVIT, HARTENBERG—KINEMATIC NOTATION FOR LOWER-PAIR MECHANISMS cannot be described since the parameters
Denavit - Hartenberg Algorithm
Denavit-Hartenberg S. V. Shah Parameterization of Euler Anglessurilshah.weebly.com/uploads/1/1/4/6/11462120/2012... · 2018. 9. 7. · Denavit-Hartenberg Parameterization of Euler
Denavit-Hartenberg Convention.ppt
KINEMATIC ANALYSIS OF PLANAR AND SPATIAL …Key Words: Planar mechanism, Spatial Mechanism, MATPACK, Raven’s method of independent position equations, Denavit-Hartenberg notation
Abb ir400 Denavit-Hartenberg
Class e2 Denavit-hartenberg Parameters
Forward kinematics...Forward Kinematics 11 Denavit J and Hartenberg RS, “A kinematic notation for lower- pair mechanisms based on matrices.” Trans ASME J. Appl. Mech, 23:215–221,













![AUTOMATED NON-DESTRUCTIVE EXAMINATION OF … · (Denavit–Hartenberg) kinematic coefficients for the robot and additional degrees of freedom [Ref 4] Figure 4: Typical robotic NDE](https://img.pdfslide.us/doc/110x75/5bdf515f09d3f251108b56df/automated-non-destructive-examination-of-denavithartenberg-kinematic-coefficients.jpg)