Embed Size (px)
Citation preview

Computer Vision April 2004 L1.1© 2004 by Davi Geiger
Binocular Stereo
Binocular Stereo
Left Image Right Image

Computer Vision April 2004 L1.2© 2004 by Davi Geiger
Each potential match is represented by a square. The black ones represent the most likely scene to “explain” the image, but other combinations could have given rise to the same image (e.g., red)
Stereo Correspondence: Ambiguities
What makes the set of black squares preferred/unique is that they have similar disparity values, the ordering constraint is satisfied and there is a unique match for each point. Any other set that could have given rise to the two images would have disparity values varying more, and either the ordering constraint violated or the uniqueness violated. The disparity values are inversely proportional to the depth values

Computer Vision April 2004 L1.3© 2004 by Davi Geiger
Rig
ht
boundary
no m
atc
h
Boundary no matchLeft
depth discontinuity
Surface orientation
discontinuity
A BC
DE F
AB
A
CD
DC
F
FE
Stereo Correspondence: Matching Space
F D C B A
AC
D
E
F

Computer Vision April 2004 L1.4© 2004 by Davi Geiger
Stereo Correspondence: Constraints
Left Epipolar Line
ooooooo
ooooooo
ooooooo
ooooooo
ooooooo
ooooooo
ooooooo
j-1 j=3 j+1
t+1
t=5
t-1w
w=2
Right Epipolar LineSmoothness (+Ordering)
oooooo
oooooo
ooooooo
oooooo
oooooo
oooooo
ooooooo
j-1 j=3 j+1
t+1
t=5
t-1w
w=2
Left Epipolar Line
Right Epipolar Line
w=3
w=0
w=-2
Uniqueness
Smoothness : In nature most surfaces are smooth in depth compared to their distance to the observer, but depth discontinuities also occur. Usually implies an ordering constraint, where points to the right of match point to the right of . Uniqueness: There should be only one disparity value associated to each point.
jq
tq
2and
2 and
wxj
wxtjtwjtx

Computer Vision April 2004 L1.5© 2004 by Davi Geiger
Stereo Algorithm: Data
C0(e,x,w) Є [0,1] representing how good is a match between a point (e,j) in the
left image and a point (e,t) in the right image (x=t+j, w=t-j is the disparity.) The epipolar lines are indexed by e. We use a correlation technique that computes the “angle” between two vectors representing the window values of the intensity.
)();5,0,,(ˆ)(
cos0001.0)(.)(
)()(,
0001.0)0(.)0(
)0()0(min),,(0
jwjjeIWIwhere
WIWI
WIWI
WIWI
WIWIwxeC
LL
LL
RL
LL
RL
0,...1,0
)5,0,,(ˆ)5,0,,(ˆ
)0()0(
wi
RL
RL
iteIijeI
WIWI
)0( LWI
)0( RWI
)( LWI
)( RWI
)(LWI
)(RWI
Computer Vision April 2004 L1.6© 2004 by Davi Geiger
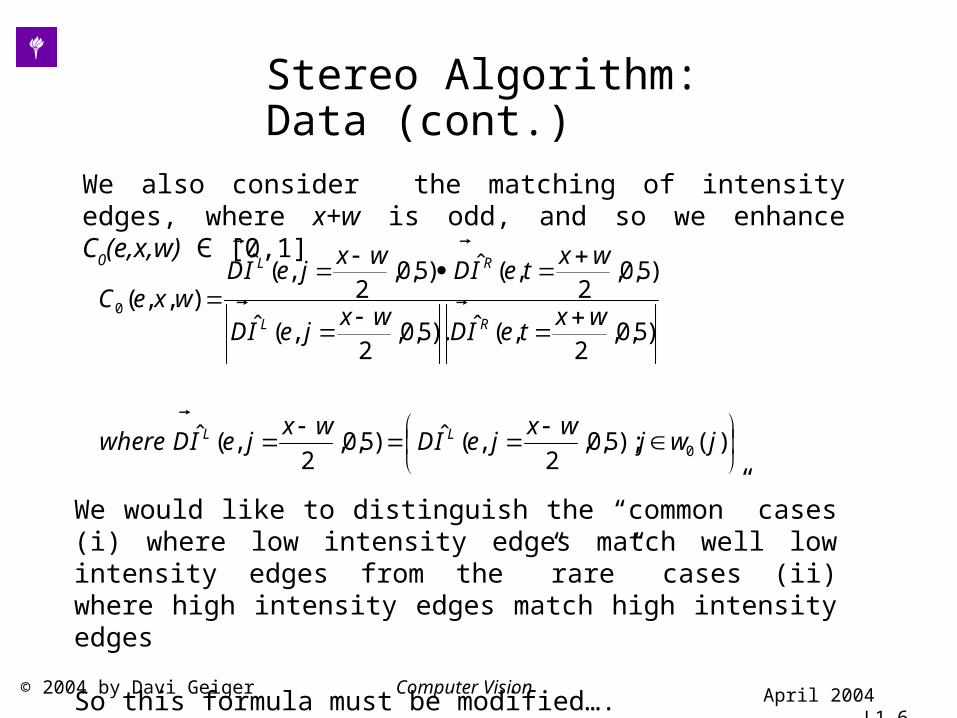
We also consider the matching of intensity edges, where x+w is odd, and so we enhance C0(e,x,w) Є [0,1]
Stereo Algorithm: Data (cont.)
We would like to distinguish the “common” cases (i) where low intensity edges match well low intensity edges from the ”rare” cases (ii) where high intensity edges match high intensity edges
So this formula must be modified….
)();5,0,2
,(ˆ)5,0,2
,(ˆ
)5,0,2
,(ˆ.)5,0,2
,(ˆ
)5,0,2
,(ˆ)5,0,2
,(ˆ
),,(
0
0
jwjwx
jeIDwx
jeIDwhere
wxteID
wxjeID
wxteID
wxjeID
wxeC
LL
RL
RL

Computer Vision April 2004 L1.7© 2004 by Davi Geiger
The stereovision algorithm produces a series of matrices Cn, which converges to a
good solution for many cases, with 0 <
The positive feedback is given by the two neighbors of node (e,j,t) (or (e,x,w)) with matches at the same disparity w=t-j.
Stereo: Smoothing and Limit Disparity
),2,(),2,(2
1)1(),,(),,(),,( 01 wxeCwxeCwxeCwxeCwxeC nnnn
The matrix is updated only within a range of
disparity : 2D+1 , i.e.,
The rational is:
(i) Less computations
(ii) Larger disparity matches imply larger errors in 3D estimation.
Djtw ||||
ooooooo
ooooooo
ooooooo
ooooooo
ooooooo
ooooooo
ooooooo
j-1 j=3 j+1
t+1
t=5
t-1w
w=2
Right Epipolar Line
Left Epipolar Line
D=3
D=-3
Dw ||

Computer Vision April 2004 L1.8© 2004 by Davi Geiger
Result

Computer Vision April 2004 L1.9© 2004 by Davi Geiger
Region A
Region B
Region A Left
Region A Right
Region B Left
Region B Right
Junctions and its properties (false matches that reveal information from vertical disparities (see Malik 94, ECCV)
Some Issues in Stereo: