Embed Size (px)
Citation preview

Stereovision
1 2
An image from the first camera An image from the second camera
Distance between the camerasThe first cameraThe second
camera
1 2

Suggested Method: Source imagesAn image from the first camera An image from the second camera
An image from the third camera

Suggested Method: processing images with an edge detector (SOBEL)
The image from the first camera The image from the second camera
The image from the third camera

Suggested Method: Image comparison
An image from the first camera An image from the second camera
An image from the third camera

Suggested Method
The Source Image
The Result as a 3D Scene

Suggested Method
The Sourced Image
The Result as a 3D Scene

Suggested Method
The Sourced Image
The Result as a 3D Scene

Solving the Problem of the objects’ orientation with the suggested method
The difference of the object’s orientation is 70 degrees
The Original Images

Solving the Problem of the objects’ orientation with the suggested method
The Original Images processed with an edge detector
The difference of the object’s orientation is 70 degrees

Solving the Problem of the objects’ orientation with the suggested method
The Reconstructed ScenesThe First Scene (reconstructed) The Second Scene (reconstructed)

Solving the Problem of the objects’ orientation with the suggested method
The object from the first scene
The object from the second scene

Solving the Problem of the objects’ orientation with the suggested method
The object from the first scene
The object from the second scene

Recognition
Comparator
3D scene
Target object from a Data
Base
The Object’s Position and
Orientation in the Scene

Recognition
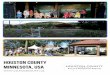
The Original ImagesThe Reconstructed scene
Using a virtual object as a target object
A virtual target object

Recognition
The Original ImagesThe Reconstructed scene
Using a virtual object as a target object
A virtual target object
Recognition
The Original ImagesThe Reconstructed scene
Using a virtual object as a target object
A virtual target object

Recognition
The Original ImagesThe Reconstructed scene
Using a virtual object as a target object
A virtual target object

Virtual Target Object
Scene
The Object in the Scene
RecognitionUsing a virtual object as a target object

The Original Images
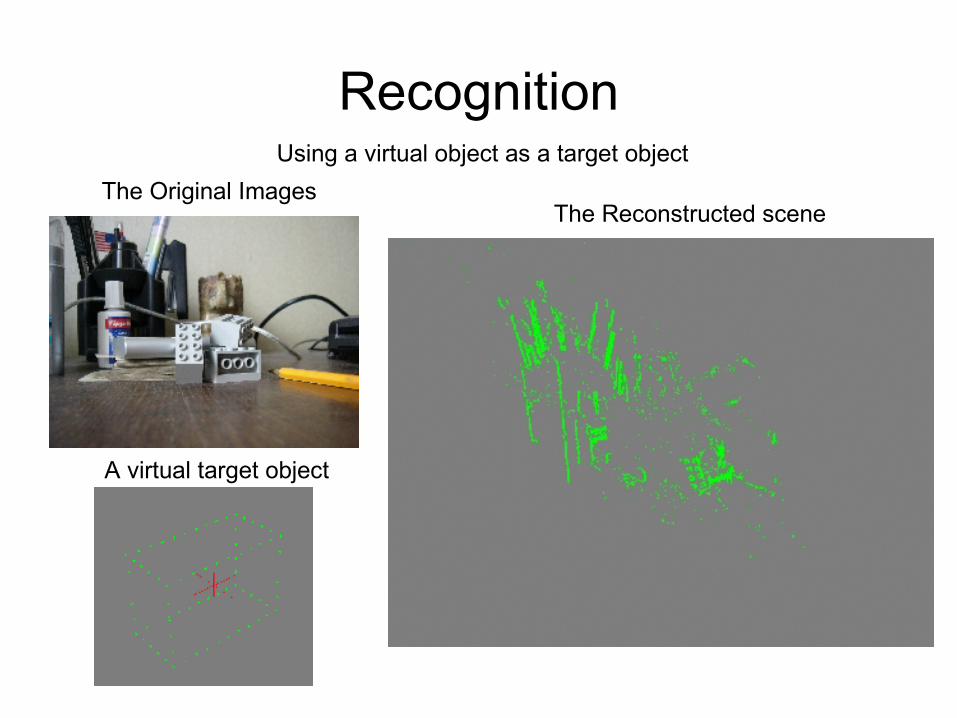
RecognitionUsing a real object as a target object
The Original Images processed with an Edge Detector
RecognitionUsing a real object as a target object

Solving the Problem of Objects’ orientation with suggested method

The Example Of Using The Suggested Method: The Identification Of People
Receiving the 3d mask from the real image of a human begin
Original Image with the projections of the
reconstructed points
3D mask of the real image

The Example Of Using The Suggested Method: The Identification Of People
Receiving the 3d mask from the real image of a human begin
Original Image with the projections of the
reconstructed points
3D mask of the real image

ConclusionThe Suggested method is independent of:
An environment, because it separates objects from each over taking in account their positions in the 3D Scene.
Objects’ positions
Direction of Light
because the result is 3D models.
The Independence of these factors gives new opportunities for the multifunctional systems of machine vision in the fields of autonomous robots, classifications, recognition, quality systems, etc.