Embed Size (px)
Citation preview

Presentation
On
SELF-DRIVING TECHNOLOGY
Sub:
Design
Engineering
4nd Sem Computer
(2016-17)
Prepared By:
Name: Shail Nakum
CONTENT
I. Introduction.
II. Features used by system.
III. Driverless car by google.
IV.Some other deriver less car. (Photos and
Video)
2
Introduction
I. An autonomous car is also known as Driverless
car, Self-Driving Car & Robot Car.
II. It is vehicle that can drive itself from one point to
another without any assistance from driver.
III. In other words it is operated by an autopilot
system
3
Features used by system..
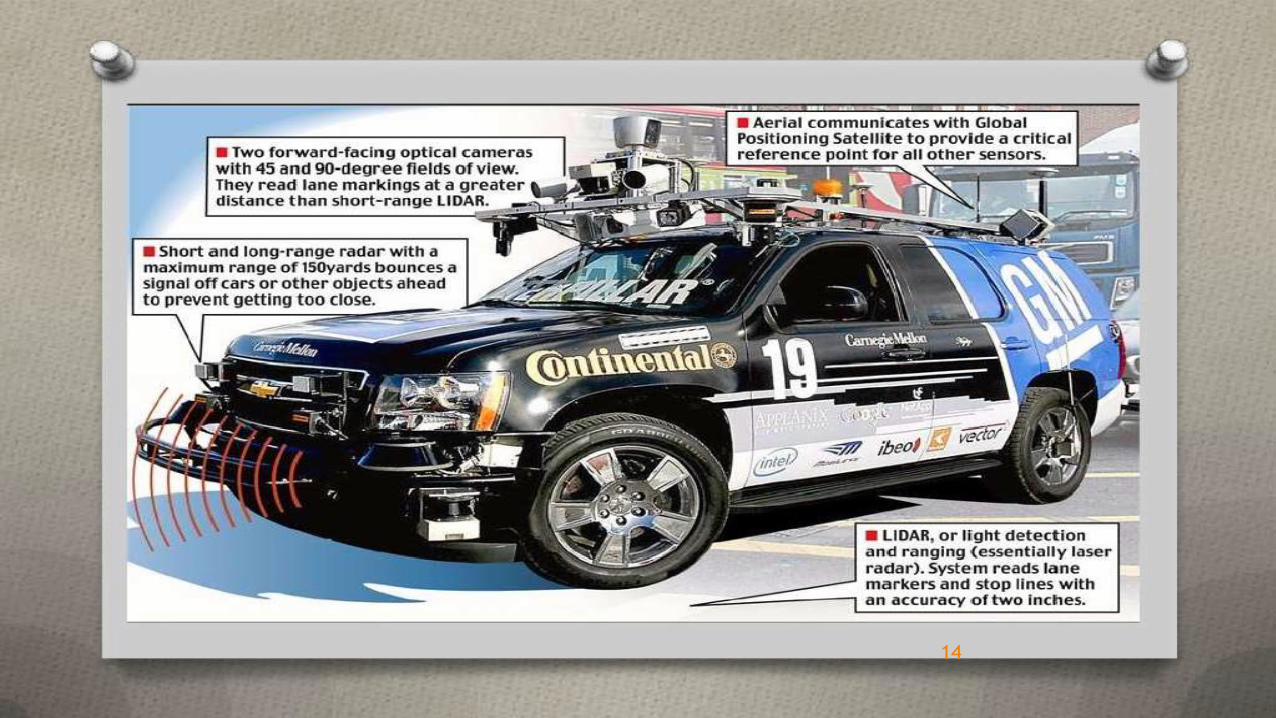
I. Sensor.
II. Navigation.
III. Motion planning. (Traffic)
IV. Actuation. (Operate the mechanics of the vehicle.)
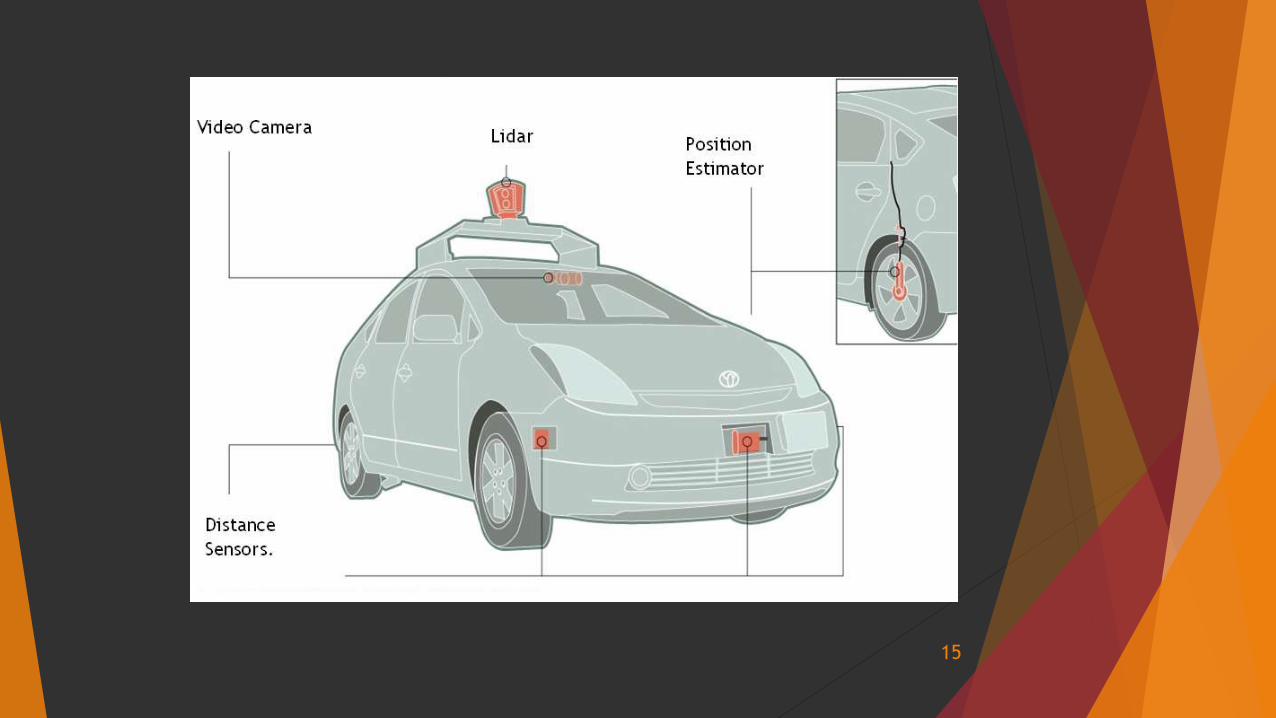
V. Lidar
VI. Video camera
VII. Position estimator
VIII. Distance sensor4
Sensors
I. Sensors used in driver less car are knows as:-
“MOBILEYE N.V.”.
II.This sensor provides a wide range of driver safety solutions
by combining artificial vision image processing, multiple
technological applications and information technology.
5
6
7
Navigation
I. The ability to plot a route from where the vehicle is to where the
user wants to be has been available for several years.
II.The more sophisticated systems also receive radio update on road
blockages, and adapt accordingly.
8

9
10
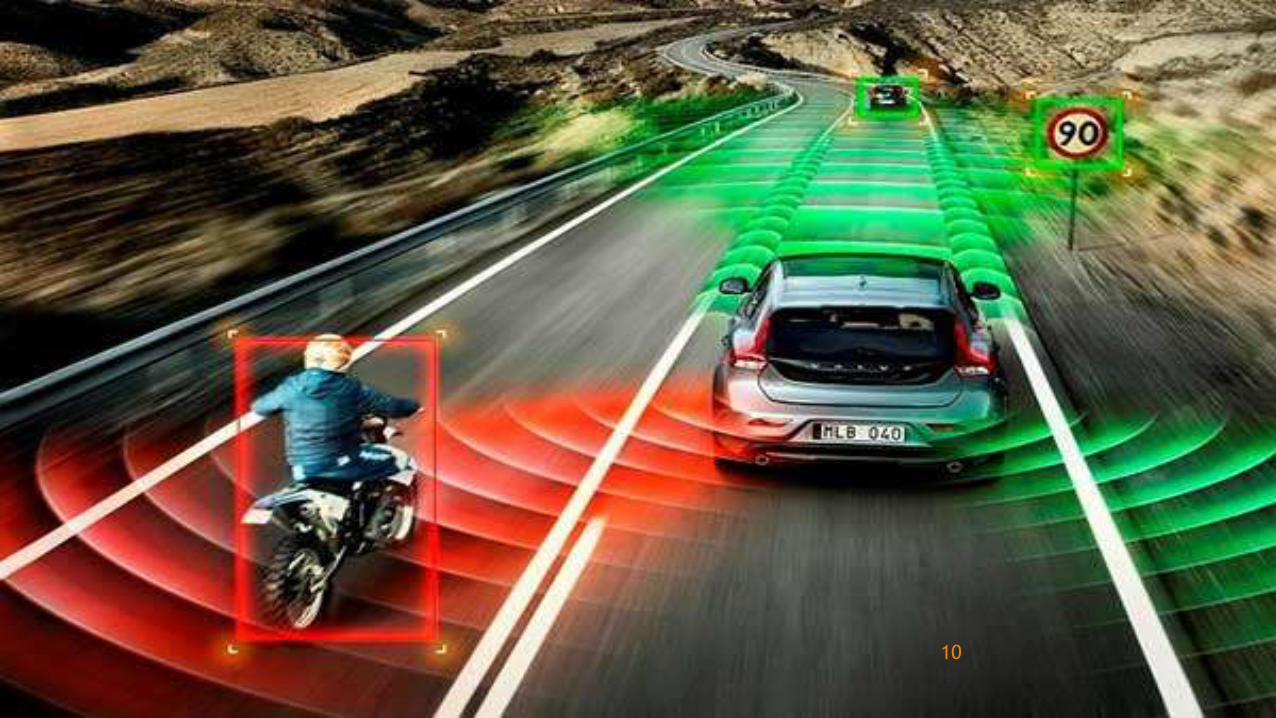
Motion planning. (Traffic)
I. Is a term used in robotics for the process of
detailing a task into discrete motions.
II.It should execute this task while avoiding task
while avoiding objects like other cars.
11

12
Control of vehicle.
i. As automotive technology matures, more and more functions of the
underlying engine, gearbox etc. are no longer mechanical means.
ii. It is controlled via a computer, which receives instructions from the
drive as input and delivers the desired effect by means of
“ELECTRONIC THROTTLE CONTROL”.
iii.Therefor, the technology for a computer to control all aspects of a
vehicle is well understood. 13
14
15
16
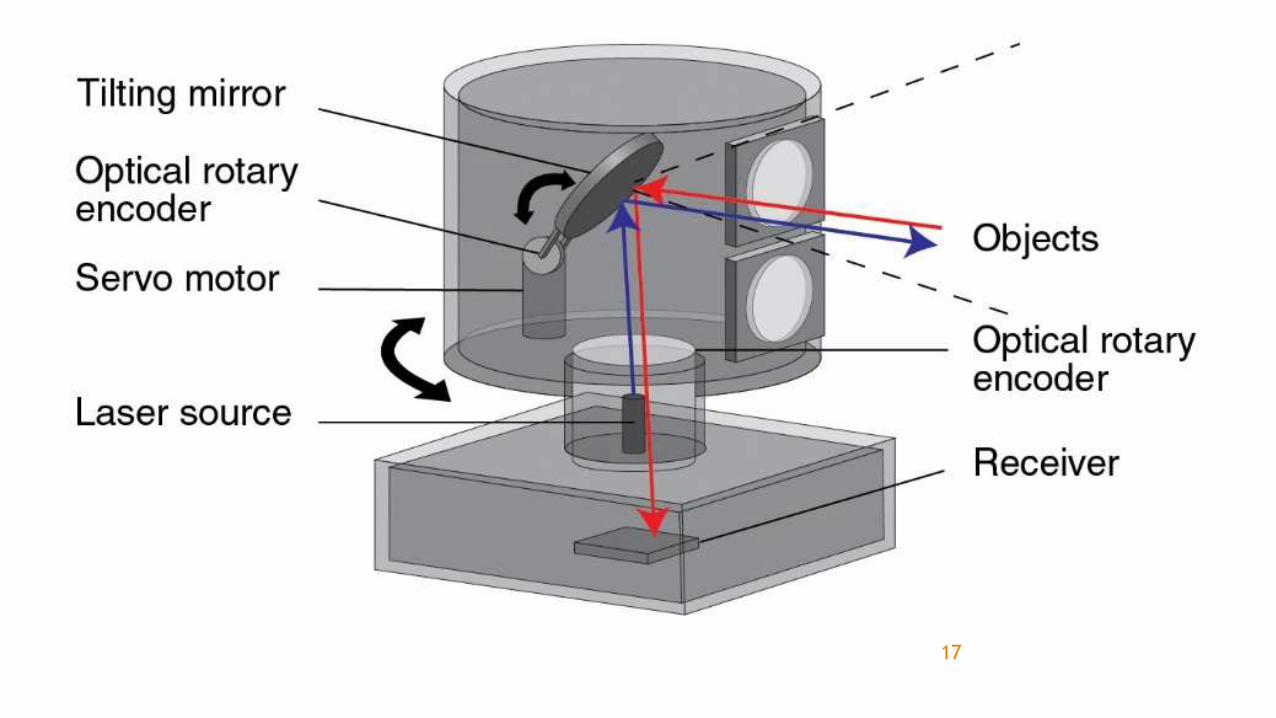
LIDAR
I. “Heart of our system”
II. LIDAR (Light Detection And Ranging, also LADAR) is an
optical remote sensing technology that can measure the distance
to, or other properties of a target by illuminating the target with
light, often using pulses from a laser.
III. Scanning distance of 60 meters (~197 feet)
17

VIDEO CAMERA
I. Detects upcoming traffic light.
18

VIDEO CAMERA
19
POSITION ESTIMATOR
(Wheel Encoder)
I. Determines vehicle's location and keeps track
of its movements.
20
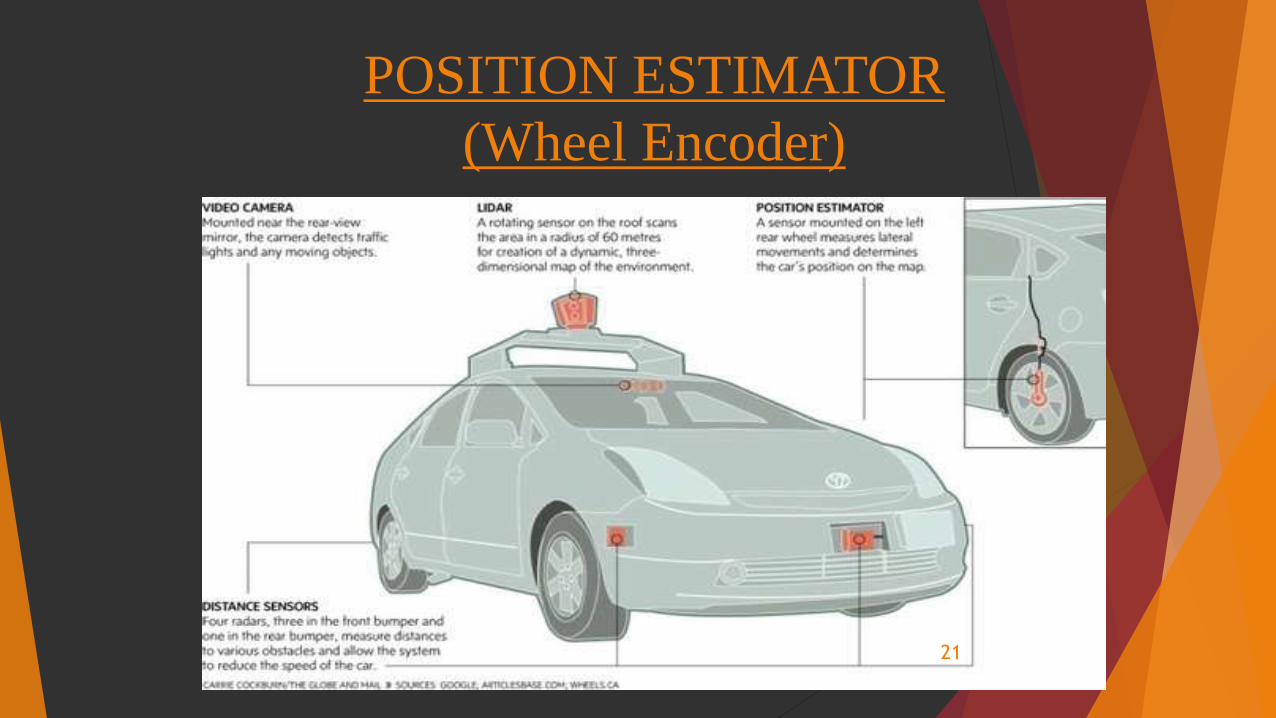
POSITION ESTIMATOR
(Wheel Encoder)
21
DISTANCE SENSOR
I. Allow the car to "see" far enough to detect
nearby or upcoming cars or obstacles
22
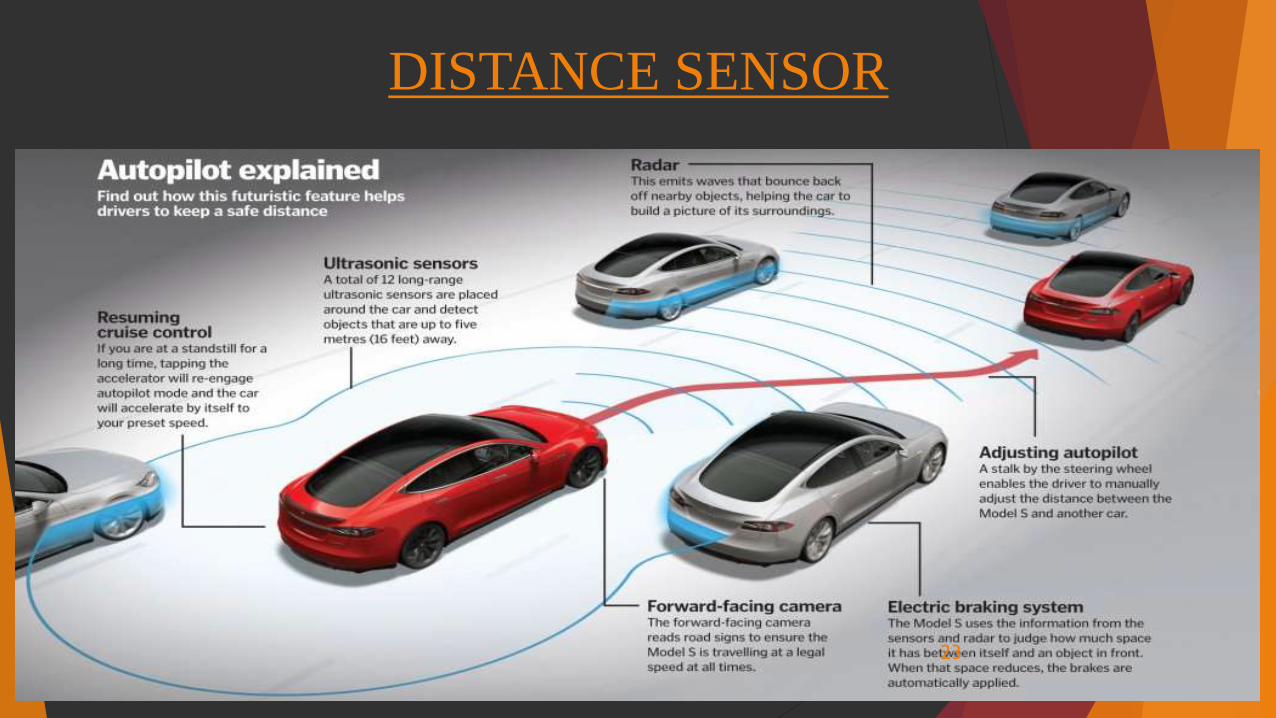
DISTANCE SENSOR
23
DRIVERLESS CAR BY
The Google Driverless Car is like any car
I. It can steer itself while looking out for obstacles.
II. It can accelerate itself to the correct speed limit.
III. It can stop and go itself based on any traffic condition.
IV. It can take its passengers anywhere it wants to.
V. It goes safely, legally, and comfortably.
24
DRIVERLESS CAR BY
GOOGLE25

SOME OTHER
DREIVER LESS CAR
26
BMW

27
MERCEDES
28