Embed Size (px)
Citation preview
Colorado Springs Co718-683-8733
11/23/14
Space Radar & FCS-BCTSpace Radar & FCS-BCTSystem Effectiveness System Effectiveness
AnalysisAnalysisSMDC StudySMDC Study
11/23/14 2
Agenda
• Study Objectives Overview– Review of Study Issues, MOE, and Analysis Products
• FCS-BCT Scenario Overview• Assumptions Update• SEAS Force Composition• Space Radar Composition
• ISR Collection Scheduler
• Run Matrix Summary and Changes
• Overview of Results (all study cases)• Conclusion & Recommendations for Further Study• Detailed Analysis (Base Case – 100 Runs)
11/23/14 3
Study Issues
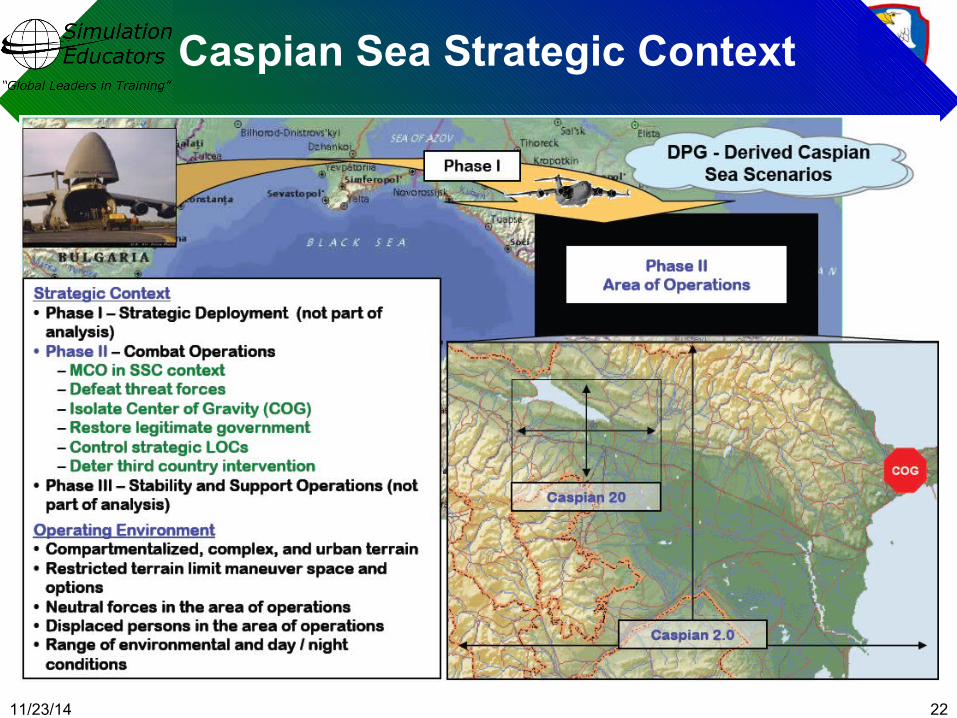
• Study Issue 1. What are the impacts on BCT ground effectiveness with varying priorities of Army FCS BCT information requests?
– Objective 1. [Effectiveness] Can the BCT meet mission vignette objectives, given varying priorities of information requests?
– Objective 2. [Efficiency]. How long does it take the BCT to achieve mission vignette objectives given varying priorities of information requests?
– Objective 3. [Lethality] What is the loss exchange ratio of the BCT to Threat while achieving the mission vignette objective, given varying priorities of information requests?
– Objective 4. [Survivability] How many BCT systems are lost achieving the mission vignette objectives, given varying priorities of information requests?
• Study Issue 2. What are the impacts on BCT ground effectiveness with varying schedule algorithms? (with similar objective.) Varying inputs?
• Study Issue 3. What are the impacts on BCT ground effectiveness with varying ISR collection agents/platforms? (with similar objective.)
11/23/14 4
Measure of Effectiveness (MOE)
• (1) Mission accomplishment. Does the BCT achieve the minimum requirements for mission accomplishment defined by the mission vignettes?
• (2) Time to Complete Mission. What is the time required for the BCT to achieve the minimum requirements for mission accomplishment defined by the mission vignettes?
• (3) Loss Exchange Ratio (LOE). What is ratio of Blue to Threat system losses incurred while the BCT achieves the minimum requirements for mission accomplishment defined by the mission vignettes?
• (4) System Loss. How many BCT platforms are lost while the BCT achieves the minimum requirements for mission accomplishment within the vignettes?
• (5) Detection History. What is the per minute record of sensor-target detections while BCT achieves the minimum requirements for mission accomplishment defined by the mission vignettes?
• Make sure scenario, blue TTPs, and threat TTPs provide an opportunity to measure OPTEMPO.
11/23/14 5
Required Analysis Products
Optimization
• Developing a simulated scheduler that– takes pre-planned inputs based on global deck for all ISR
systems– schedules information requests based on constraints from SR
constellation capabilities– evaluates Army FCS information requests for collection.
• Develop a BCT and below maneuver vignette to support analysis using information requests as part of the global collection plan.
• Show impacts of System Response in terms of ground maneuver measures of effectiveness (MOE).
11/23/14 6
Study Assumptions - Update
• FCS-BCT with organic UAV & UGS Sensors provide continuous coverage (unrealistic)
• Red Force has comparable force capabilities, including satellite access
• Communication time delays are constant (unrealistic)
• UAVs are un-killable (unrealistic)• SR is the only global ISR collection asset
(unrealistic)
11/23/14 7
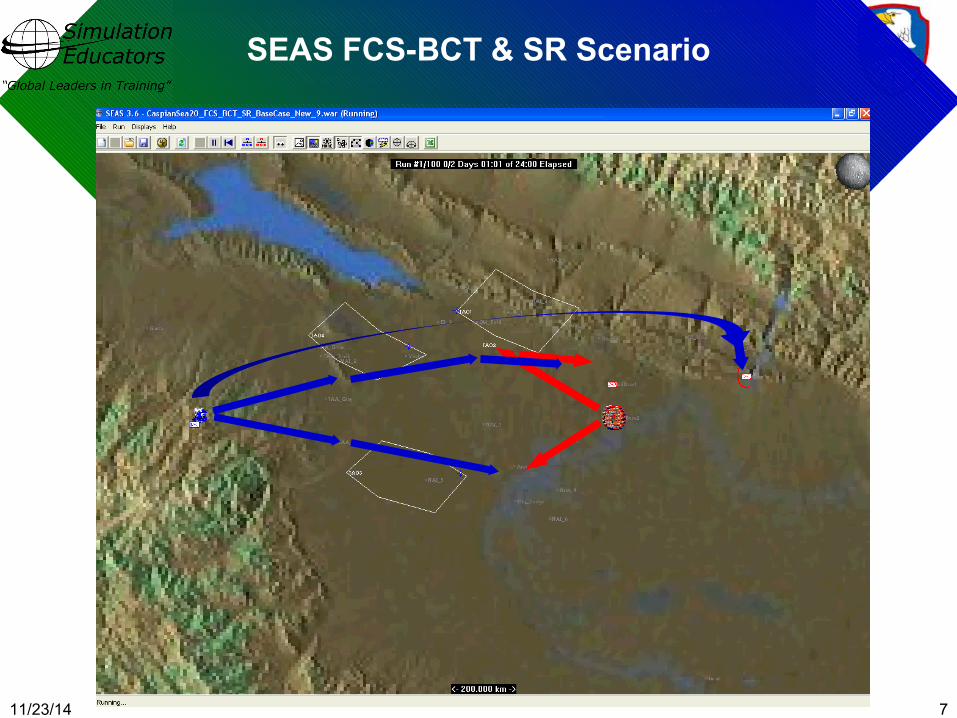
SEAS FCS-BCT & SR Scenario
Colorado Springs Co718-683-8733
11/23/14
SEAS Overview
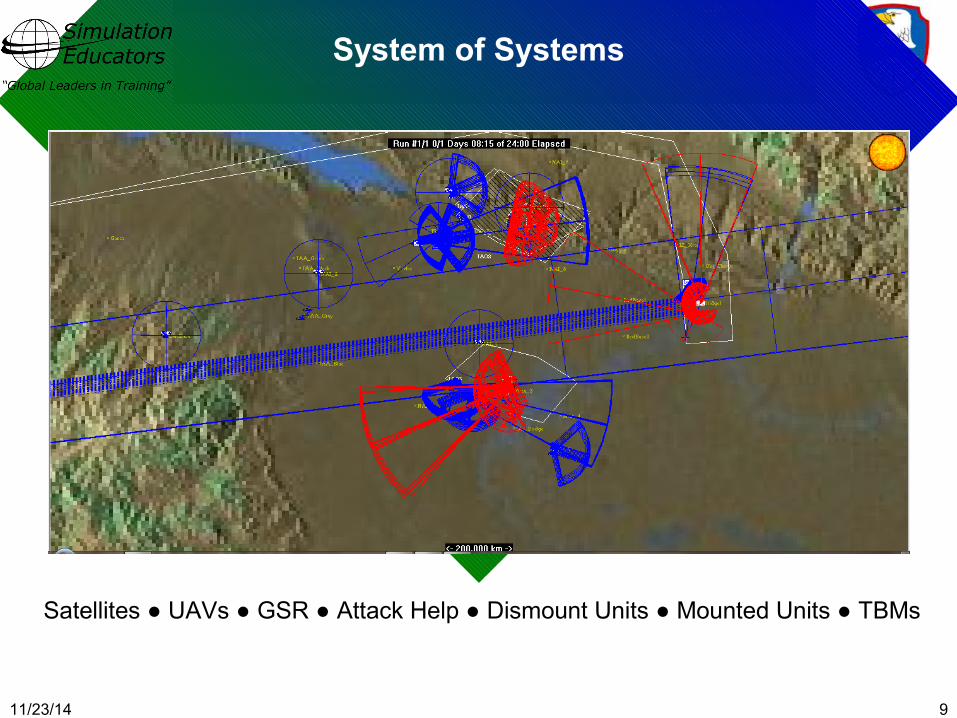
System of Systems
11/23/14 9
Satellites ● UAVs ● GSR ● Attack Help ● Dismount Units ● Mounted Units ● TBMs
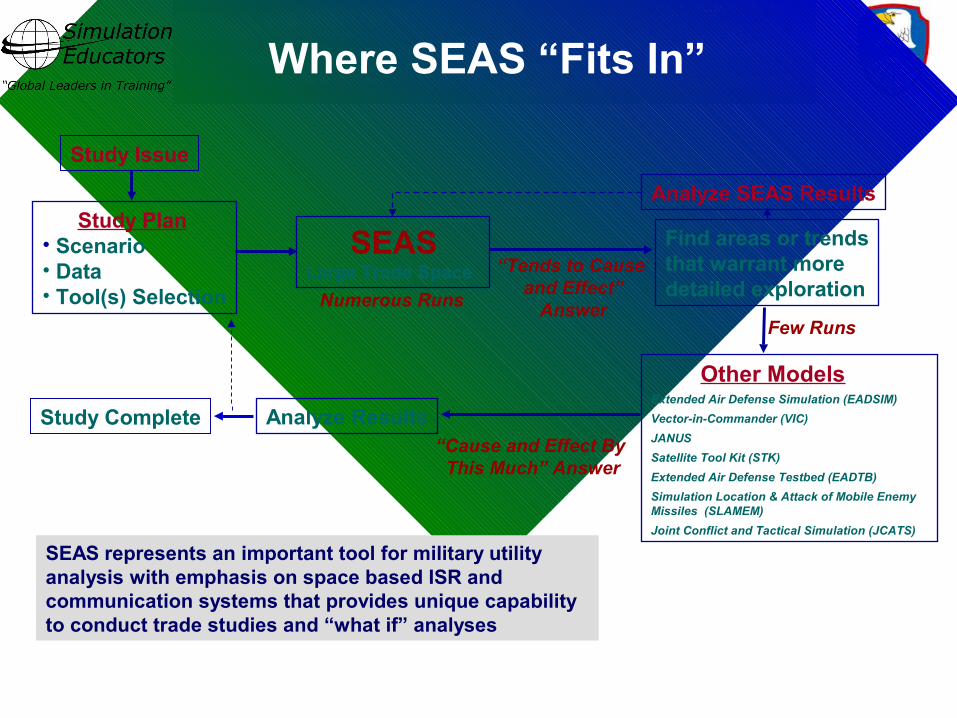
Where SEAS “Fits In”
SEAS represents an important tool for military utility analysis with emphasis on space based ISR and communication systems that provides unique capability to conduct trade studies and “what if” analyses
Study Plan• Scenario• Data• Tool(s) Selection
Find areas or trendsthat warrant moredetailed exploration
SEASLarge Trade Space
Other ModelsExtended Air Defense Simulation (EADSIM)
Vector-in-Commander (VIC)
JANUS
Satellite Tool Kit (STK)
Extended Air Defense Testbed (EADTB)
Simulation Location & Attack of Mobile Enemy Missiles (SLAMEM)
Joint Conflict and Tactical Simulation (JCATS)
Analyze SEAS Results
Few Runs
“Tends to Cause and Effect”
Answer
“Cause and Effect By This Much” Answer
Study Issue
Analyze ResultsStudy Complete
Numerous Runs
11/23/14 11
SEAS Overview
● SEAS is a study-driven, agent-based, military utility analysis tool
● Physics-based, stochastic, Monte Carlo simulation
● Initially developed to support the military space acquisitions community
● Used to explore the effects of space and C4ISR system performance characteristics and concept of operations upon combat outcomes
● Part of the Air Force Standard Analysis Toolkit (AFSAT)
● Part of the Air Force Space Command M & S Toolkit
● 100% Government-owned software
● Runs on Windows (PC) computers
11/23/14 12
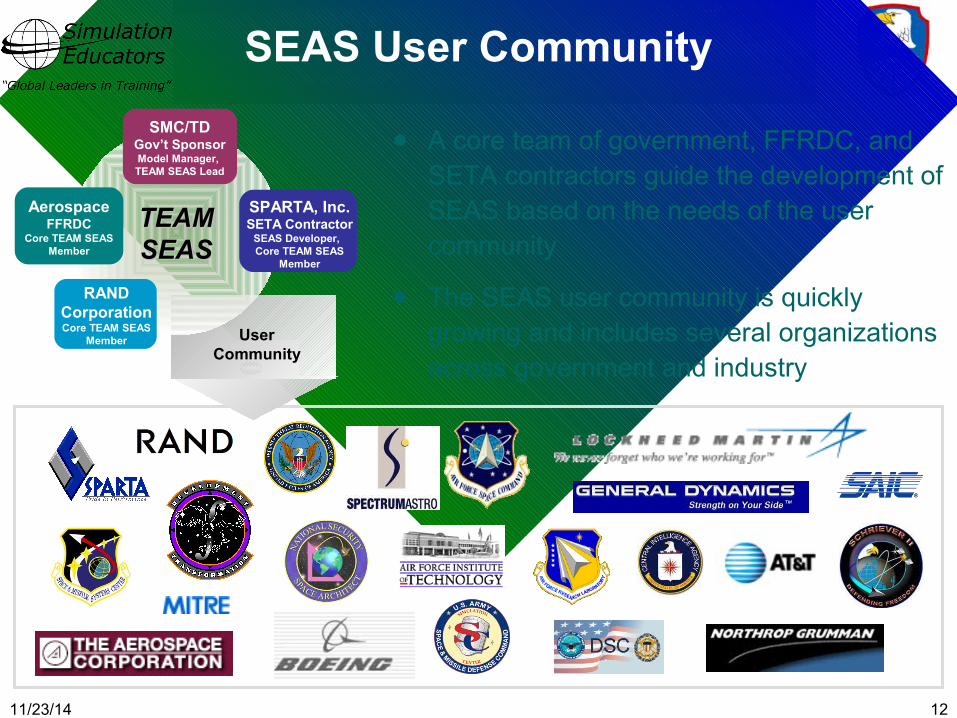
● A core team of government, FFRDC, and SETA contractors guide the development of SEAS based on the needs of the user community
● The SEAS user community is quickly growing and includes several organizations across government and industry
0
TEAMTEAMSEASSEAS
SMC/TDGov’t SponsorModel Manager, TEAM SEAS Lead
AerospaceFFRDC
Core TEAM SEAS Member
SPARTA, Inc.SETA Contractor
SEAS Developer, Core TEAM SEAS
Member
RANDCorporationCore TEAM SEAS
Member UserCommunity
SEAS User Community
11/23/14 13
Operations Other Than
War
Operations Other Than
War
Homeland Defense/ Security
Homeland Defense/ Security
Special OperationsSpecial
Operations
Small Scale ContingenciesSmall Scale
Contingencies
Architecture Evaluations
System Performance Analysis
CONOPS Exploration
Requirements Determination/Analysis
Wargame Analysis
Trade-Off Analysis
Force Mix/Force Structure Analysis
Applications of SEAS
Major Combat
Operations
Major Combat
Operations
11/23/14 14
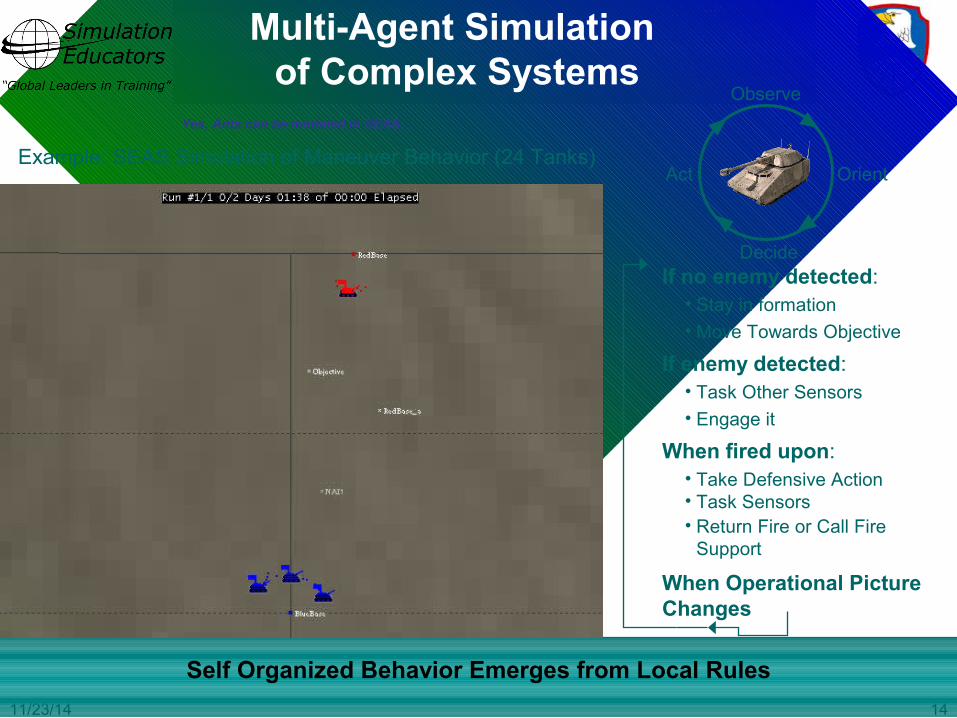
Example: SEAS Simulation of Maneuver Behavior (24 Tanks)
Multi-Agent Simulation of Complex Systems
Self Organized Behavior Emerges from Local Rules
Yes, Ants can be modeled in SEAS…
Observe
Orient
Decide
Act
If no enemy detected:• Stay in formation
• Move Towards Objective
If enemy detected:• Task Other Sensors• Engage it
When fired upon:• Take Defensive Action• Task Sensors• Return Fire or Call Fire
Support
When Operational Picture Changes
11/23/14 15
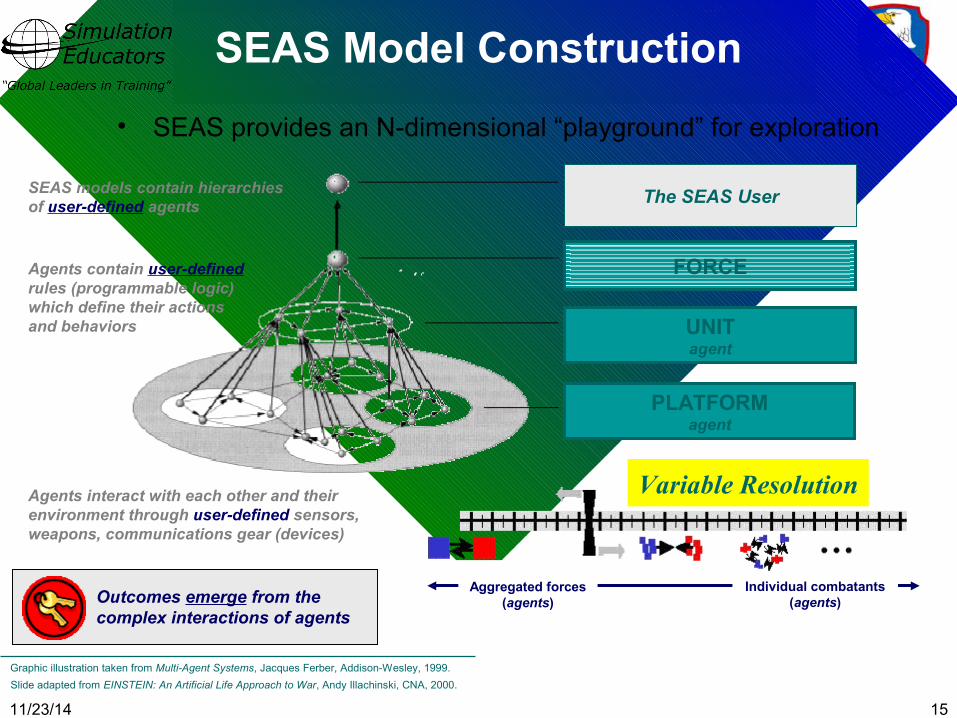
SEAS Model Construction
Graphic illustration taken from Multi-Agent Systems, Jacques Ferber, Addison-Wesley, 1999.
• SEAS provides an N-dimensional “playground” for exploration
Slide adapted from EINSTEIN: An Artificial Life Approach to War, Andy Illachinski, CNA, 2000.
Aggregated forces(agents)
Individual combatants(agents)
FORCE
The SEAS User
UNITagent
PLATFORMagent
Agents interact with each other and their environment through user-defined sensors, weapons, communications gear (devices)
SEAS models contain hierarchies of user-defined agents
Agents contain user-defined rules (programmable logic) which define their actions and behaviors
Outcomes emerge from the complex interactions of agents
Variable Resolution
11/23/14 16
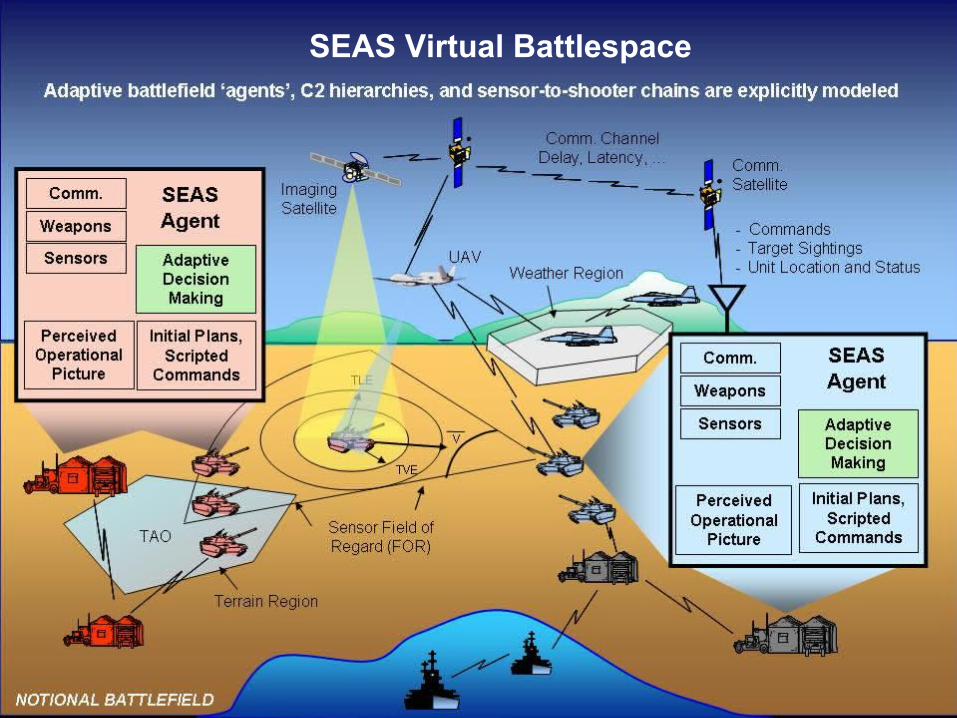
SEAS Virtual Battlespace
11/23/14 17
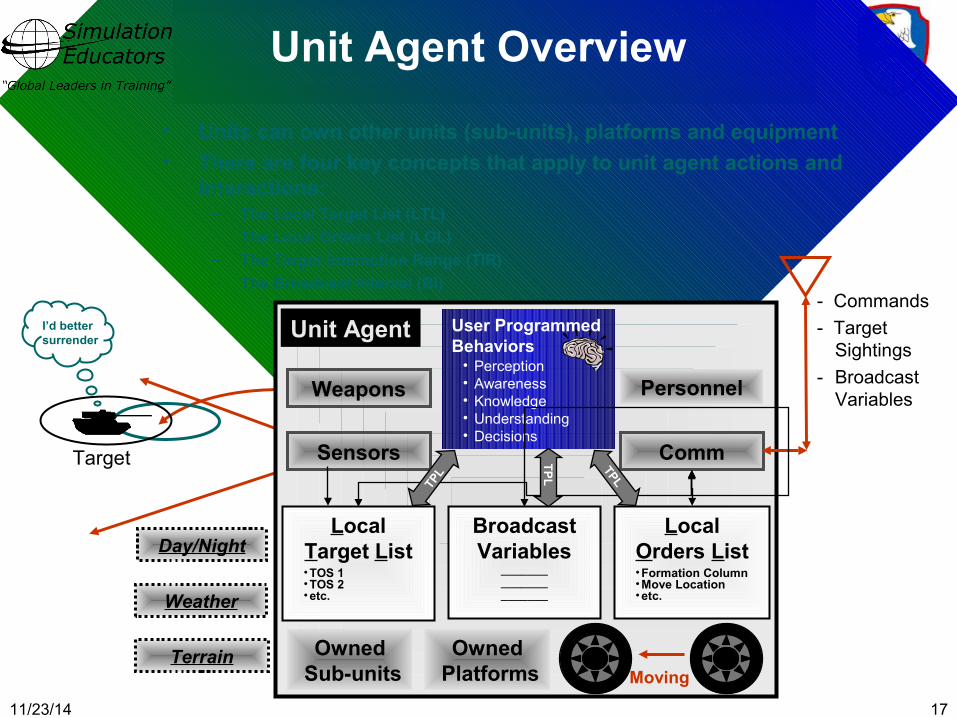
• Units can own other units (sub-units), platforms and equipment• There are four key concepts that apply to unit agent actions and
interactions:– The Local Target List (LTL)– The Local Orders List (LOL)– The Target Interaction Range (TIR)– The Broadcast Interval (BI)
Unit Agent Overview
- Commands
- Target Sightings
- Broadcast Variables
Target
Weather
Terrain
Day/Night
I’d better surrender
Unit Agent
Comm
Owned Platforms
Weapons
Sensors
LocalTarget List• TOS 1• TOS 2• etc.
User ProgrammedBehaviors
• Perception• Awareness• Knowledge• Understanding• Decisions
LocalOrders List• Formation Column• Move Location• etc.
Moving
Personnel
Owned Sub-units
BroadcastVariables
_____________________
TPL
TPL
TP
L
11/23/14 18
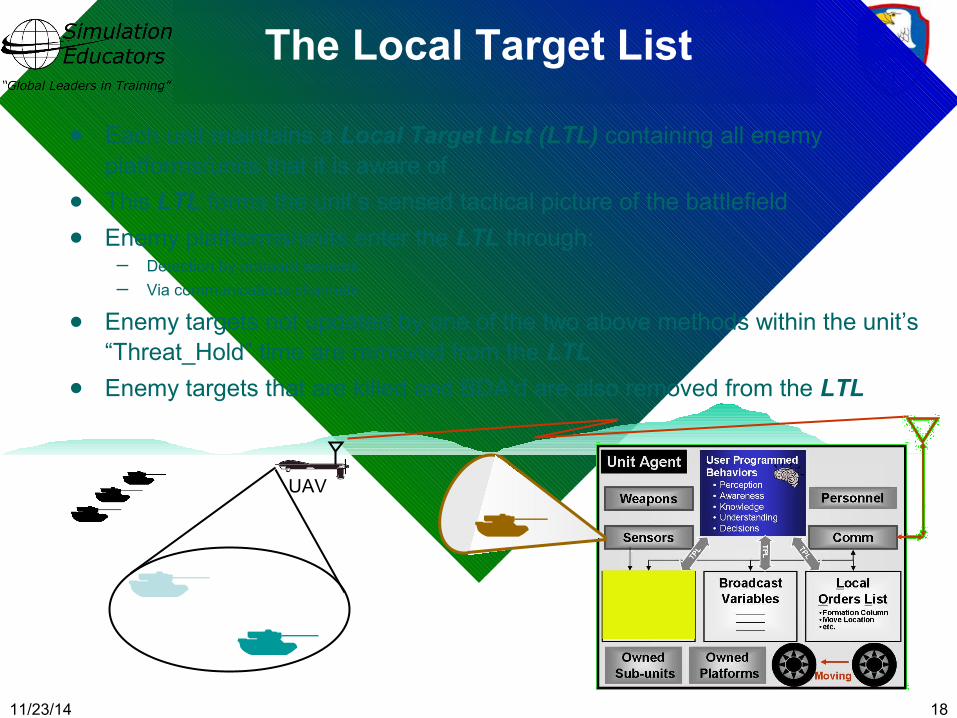
The Local Target List
● Each unit maintains a Local Target List (LTL) containing all enemy platforms/units that it is aware of
● This LTL forms the unit’s sensed tactical picture of the battlefield
● Enemy plaftforms/units enter the LTL through:─ Detection by onboard sensors
─ Via communications channels
● Enemy targets not updated by one of the two above methods within the unit’s “Threat_Hold” time are removed from the LTL
● Enemy targets that are killed and BDA'd are also removed from the LTL
UAV
11/23/14 19
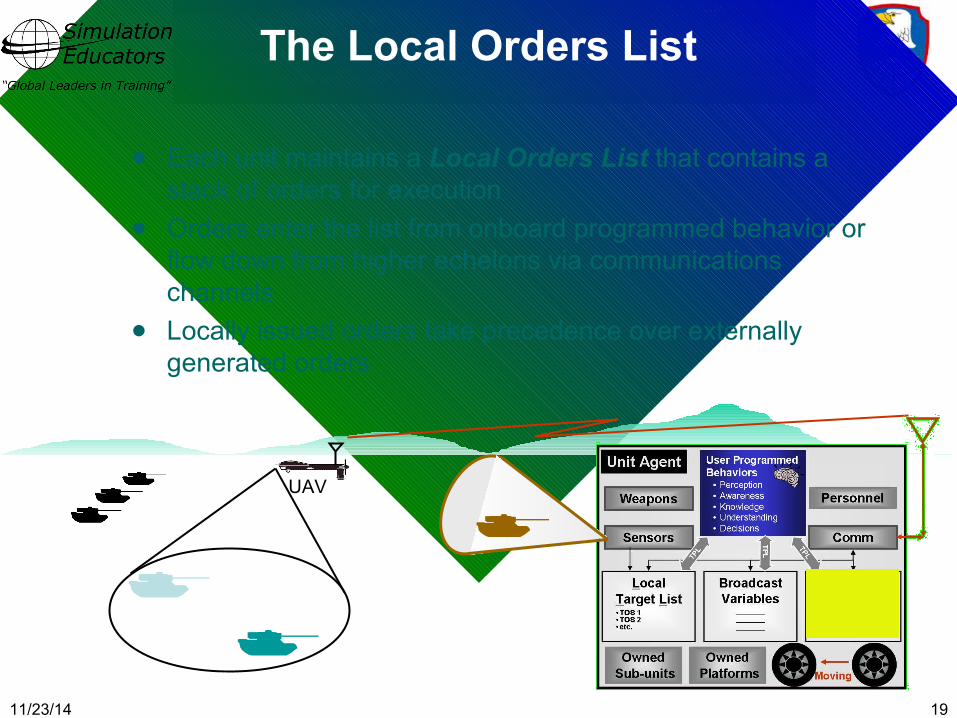
The Local Orders List
● Each unit maintains a Local Orders List that contains a stack of orders for execution
● Orders enter the list from onboard programmed behavior or flow down from higher echelons via communications channels
● Locally issued orders take precedence over externally generated orders
UAV
11/23/14 20
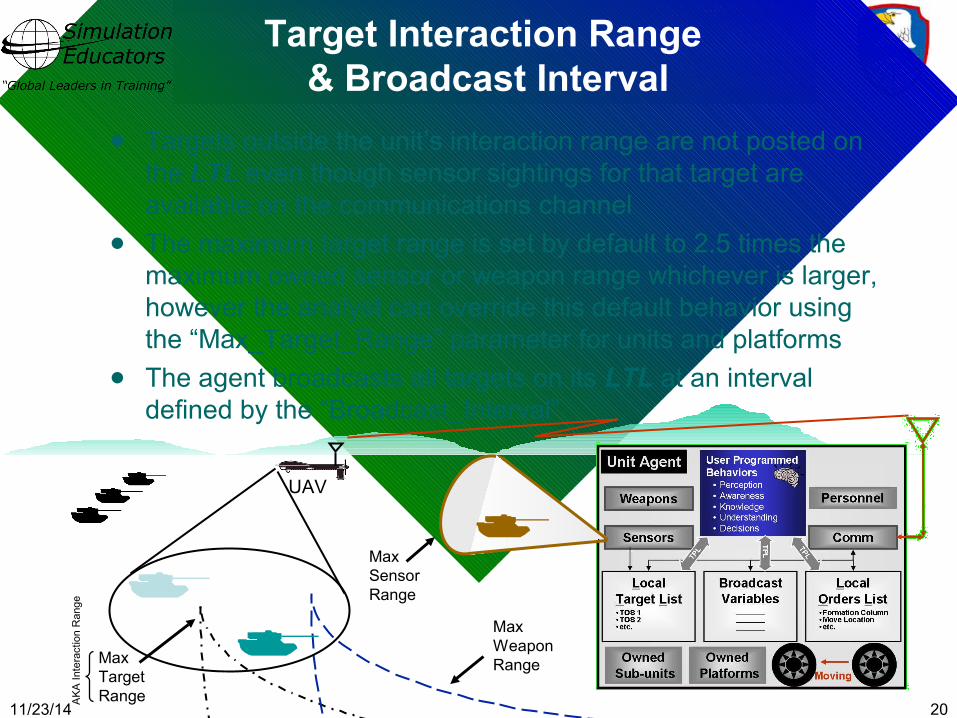
Target Interaction Range & Broadcast Interval
● Targets outside the unit’s interaction range are not posted on the LTL even though sensor sightings for that target are available on the communications channel
● The maximum target range is set by default to 2.5 times the maximum owned sensor or weapon range whichever is larger, however the analyst can override this default behavior using the “Max_Target_Range” parameter for units and platforms
● The agent broadcasts all targets on its LTL at an interval defined by the “Broadcast_Interval”
MaxTarget RangeA
KA
Int
era
ctio
n R
ang
e
MaxSensorRange
MaxWeaponRange
UAV
Colorado Springs Co718-683-8733
11/23/14
The FCS BCT Scenario
Caspian Sea 20 Vignette 1
11/23/14 22
Caspian Sea Strategic Context

11/23/14 23
FCS BCT – A Unit Task Organization
UA
HHC BIC
FSB NLOS
V
FCS (Manned):
ICV C2V R&SV MCS NLOS Mortar FCS Cannon FCS MV-Evac FCS MV-T FRMV
FCS (Unmanned): ARV-RSTA ARV A (L) ARV-Assault MULE – Transport/Retrans NLOS LS
SUGV MULE w/ GSTAMIDS
FCS (Manned):
ICV C2V R&SV MCS NLOS Mortar FCS Cannon FCS MV-Evac FCS MV-T FRMV
FCS (Unmanned): ARV-RSTA ARV A (L) ARV-Assault MULE – Transport/Retrans NLOS LS
SUGV MULE w/ GSTAMIDS
Trucks/Trailers:
HMMWV (C2) HMMWV (SPT) HEMTT – LHS HEMTT – Fueler HMMWV – CMT HMMWV - AMB HEMTT Wrecker Trailers – PLS FRS (Includes LHS) Tank Racks (POL) Hippos Camels SATS Trailers
Trucks/Trailers:
HMMWV (C2) HMMWV (SPT) HEMTT – LHS HEMTT – Fueler HMMWV – CMT HMMWV - AMB HEMTT Wrecker Trailers – PLS FRS (Includes LHS) Tank Racks (POL) Hippos Camels SATS Trailers
UAVs: UAV CL I L/C Units UAV CL I Aerial Vehicles UAV CL II L/C Units UAV CL II Aerial Vehicles UAV CL III L/C Units UAV CL III Aerial Vehicle UAV CL IVa L/C Units UAV CL IVa Aerial Vehicles
UAV CL IVb L/C Units
Other: RAH-66 Comanche (or alternate) 81mm Mortar Forklift – 10K Forklift – 4K E-Q36 Radar Q64 Radar AAFARS HTARS
UAVs: UAV CL I L/C Units UAV CL I Aerial Vehicles UAV CL II L/C Units UAV CL II Aerial Vehicles UAV CL III L/C Units UAV CL III Aerial Vehicle UAV CL IVa L/C Units UAV CL IVa Aerial Vehicles
UAV CL IVb L/C Units
Other: RAH-66 Comanche (or alternate) 81mm Mortar Forklift – 10K Forklift – 4K E-Q36 Radar Q64 Radar AAFARS HTARS
11/23/14 24
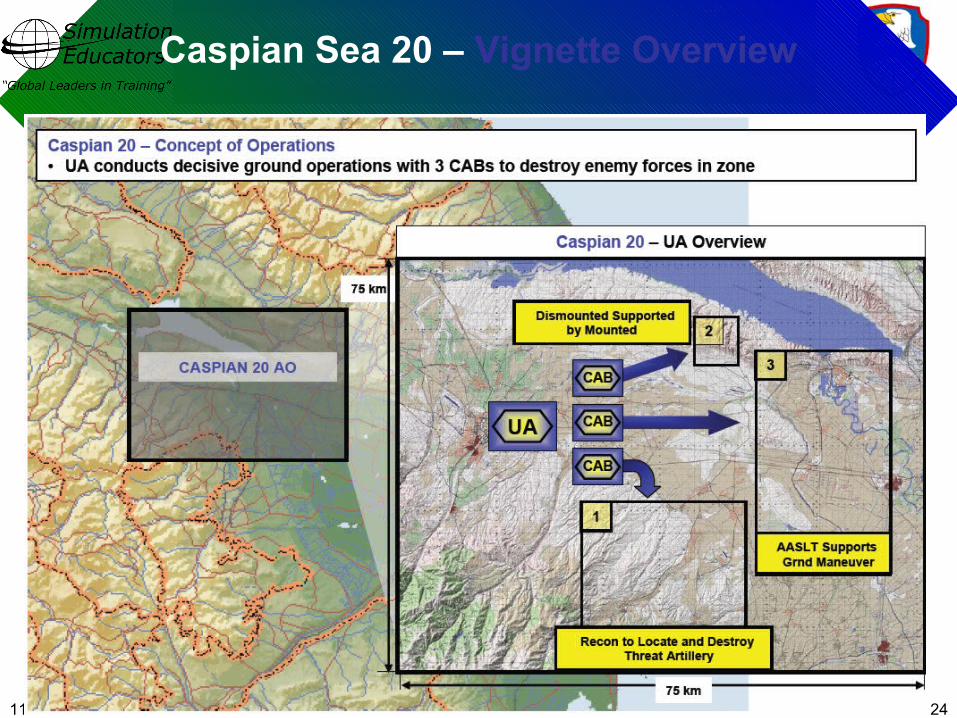
Caspian Sea 20 – Vignette Overview
11/23/14 25
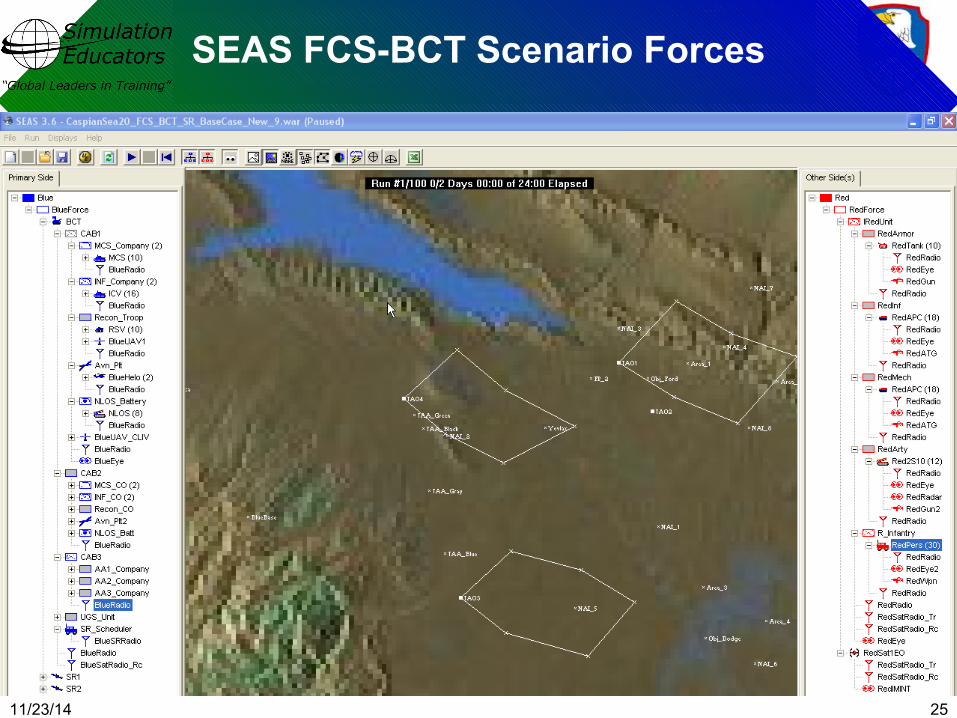
SEAS FCS-BCT Scenario Forces
11/23/14 26
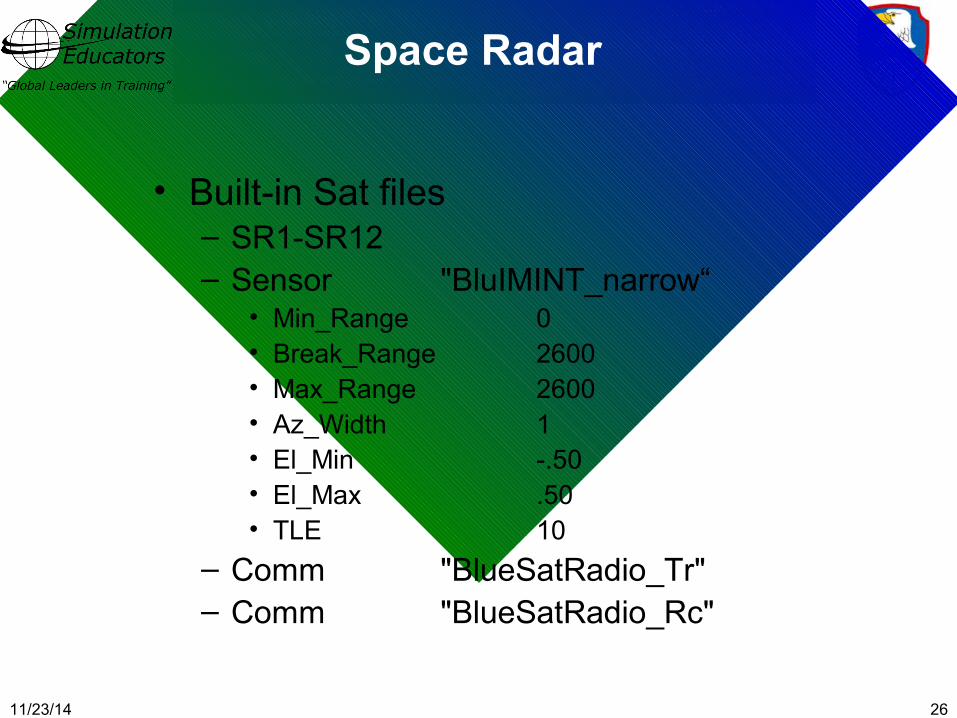
Space Radar
• Built-in Sat files– SR1-SR12– Sensor "BluIMINT_narrow“
• Min_Range 0• Break_Range 2600• Max_Range 2600• Az_Width 1• El_Min -.50• El_Max .50• TLE 10
– Comm "BlueSatRadio_Tr"– Comm "BlueSatRadio_Rc"
11/23/14 27
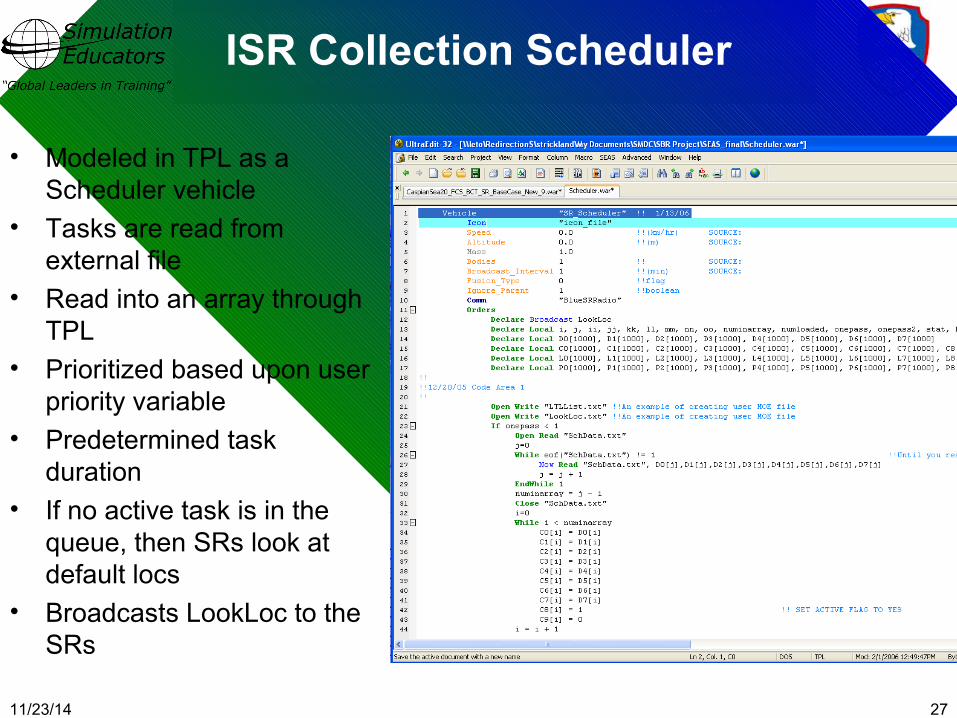
ISR Collection Scheduler
• Modeled in TPL as a Scheduler vehicle
• Tasks are read from external file
• Read into an array through TPL
• Prioritized based upon user priority variable
• Predetermined task duration
• If no active task is in the queue, then SRs look at default locs
• Broadcasts LookLoc to the SRs
Colorado Springs Co718-683-8733
11/23/14
Comparative ResultsSMDS Study
11/23/14 29
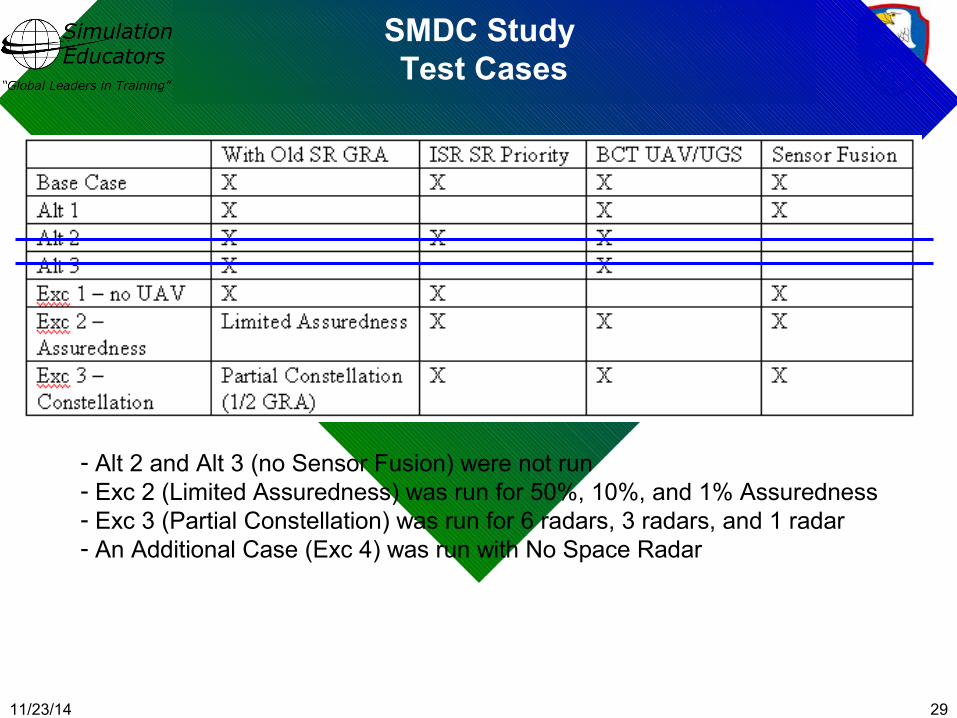
SMDC Study Test Cases
- Alt 2 and Alt 3 (no Sensor Fusion) were not run- Exc 2 (Limited Assuredness) was run for 50%, 10%, and 1% Assuredness- Exc 3 (Partial Constellation) was run for 6 radars, 3 radars, and 1 radar- An Additional Case (Exc 4) was run with No Space Radar
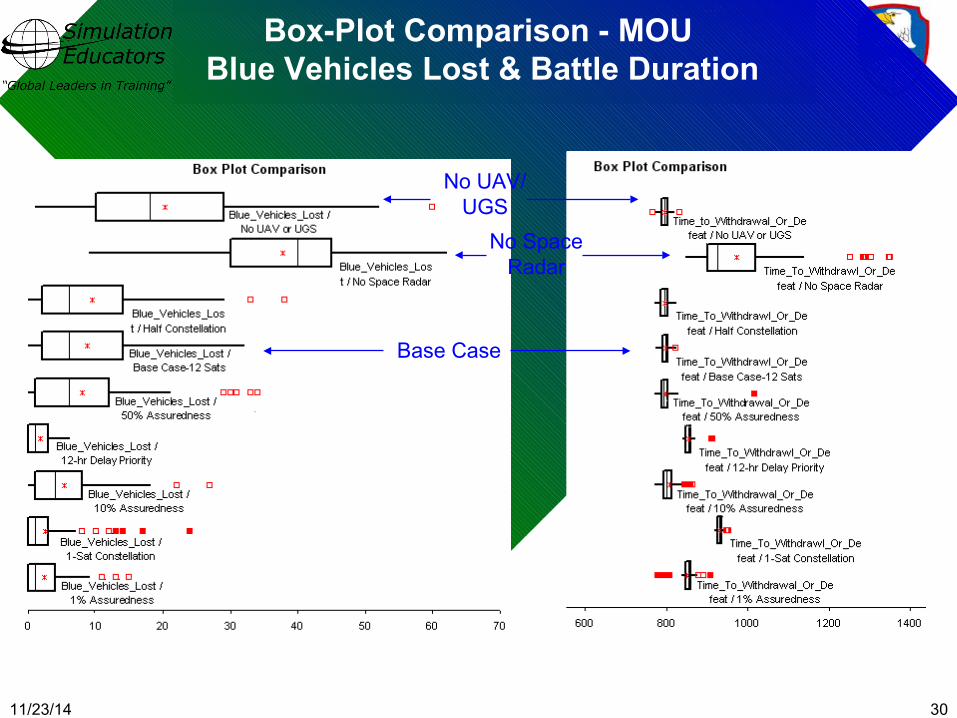
11/23/14 30
Base Case
No SpaceRadar
No UAV/UGS
Box-Plot Comparison - MOU Blue Vehicles Lost & Battle Duration
11/23/14 31
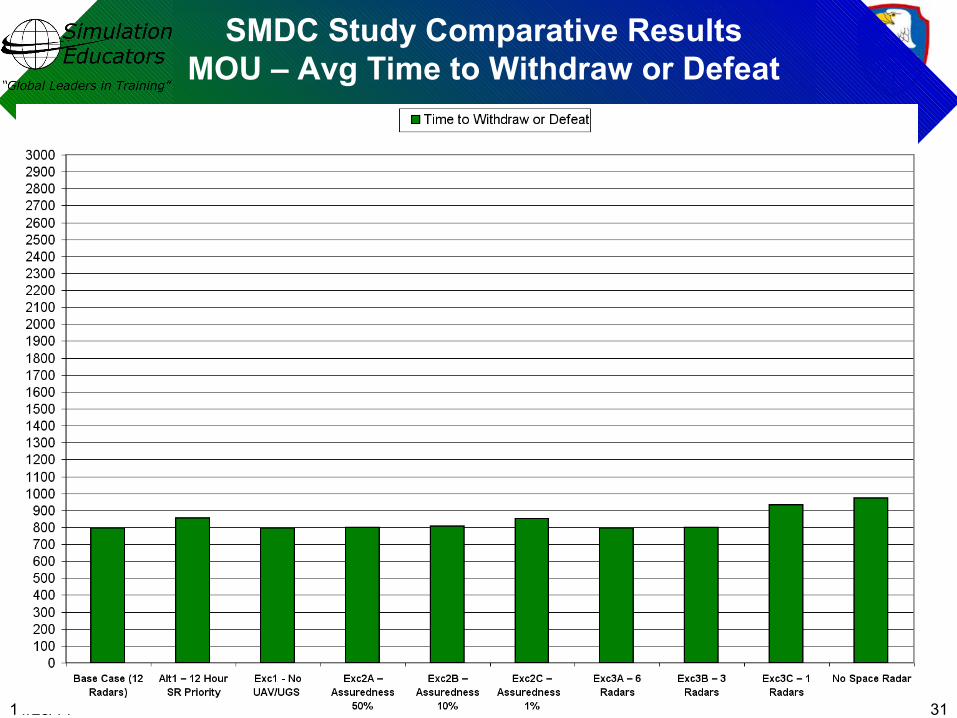
SMDC Study Comparative ResultsMOU – Avg Time to Withdraw or Defeat
Colorado Springs Co718-683-8733
11/23/14
Conclusions & RecommendationsFor Further Study
11/23/14 33
Conclusions
• The combination of FCS-BCT organic sensors and Space Radar generate a ISR collection dynamic that increase system effectiveness.
• The combination of FCS-BCT organic sensors and Space Radar “minimize” blue casualties and battle duration. Neither alone are as effective.
• There are sensor interactions that cannot be explained by the current analysis. These require further investigation.
11/23/14 34
Recommendations for Further Study
• Variable communication delays – sensor information latency
• Stochastic UAV survivability modeled• Non-continuous FCS-BCT UAV coverage • Global UAV ISR collection assets (e.g., Warrior)• Varying schedule algorithms – more complexity



![Untitled-2 []...Eben Coffin4 Eben Coffin John Darling7 paul Painter Bell Coffin John Darling King Grounds South Seas South Seas South Seas South Seas Brazil South Seas Production 550](https://img.pdfslide.us/doc/110x75/60e8bb276bd41c47e12f2272/untitled-2-eben-coffin4-eben-coffin-john-darling7-paul-painter-bell-coffin.jpg)

























