Embed Size (px)
Citation preview
http://roboticvision.org/
ROS Intro/TutorialJuxi Leitner<[email protected]>
http://Juxi.net/
Hands-onV
http://roboticvision.org/
from PHD Comics and Willow Garage
http://roboticvision.org/
Why ROS?
● abstraction
● distributed computation (multi thread, multi computer, multi robot)
● software reuse and rapid testing
http://roboticvision.org/
What is ROS?
● free and open source● thin, multi-lingual, peer-to-peer● tools-based
It is NOT a● programming language or IDE● (just a) library● (full) operating system
http://roboticvision.org/
Mount the USB stick and install VirtualBox.
In VirtualBox go to Machine -> Add… and select the Ubuntu_14.04_ROS.vbox image from the stick.
How?
Try it out!
http://roboticvision.org/
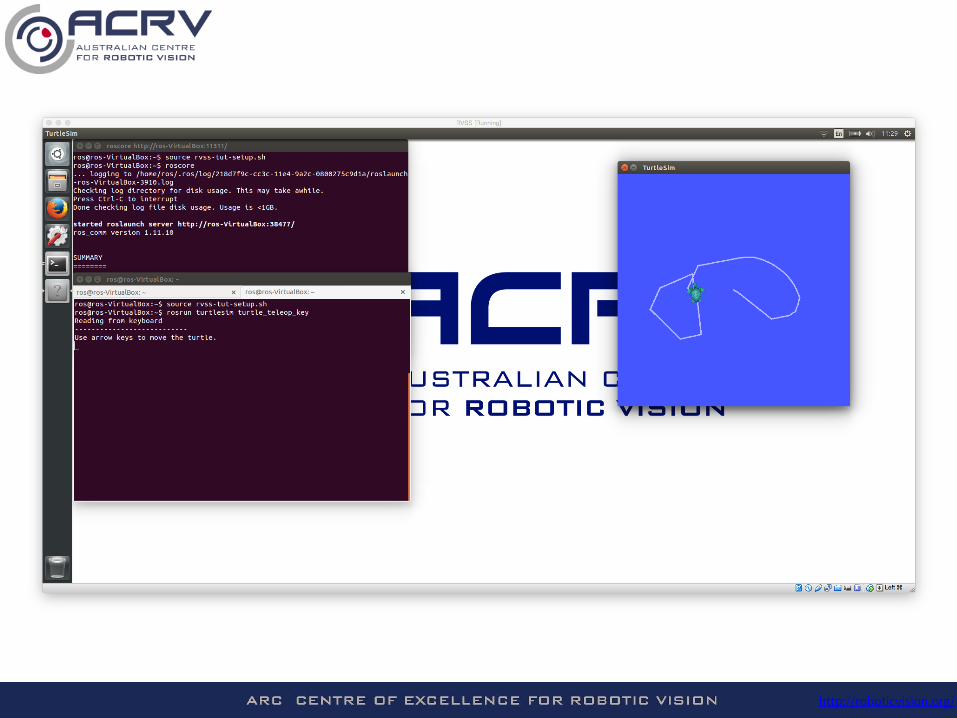
We need three terminals to run the following commands:
> roscore
> rosrun turtlesim turtlesim_node
> rosrun turtlesim turtle_teleop_key
How?
Try it out!
http://roboticvision.org/
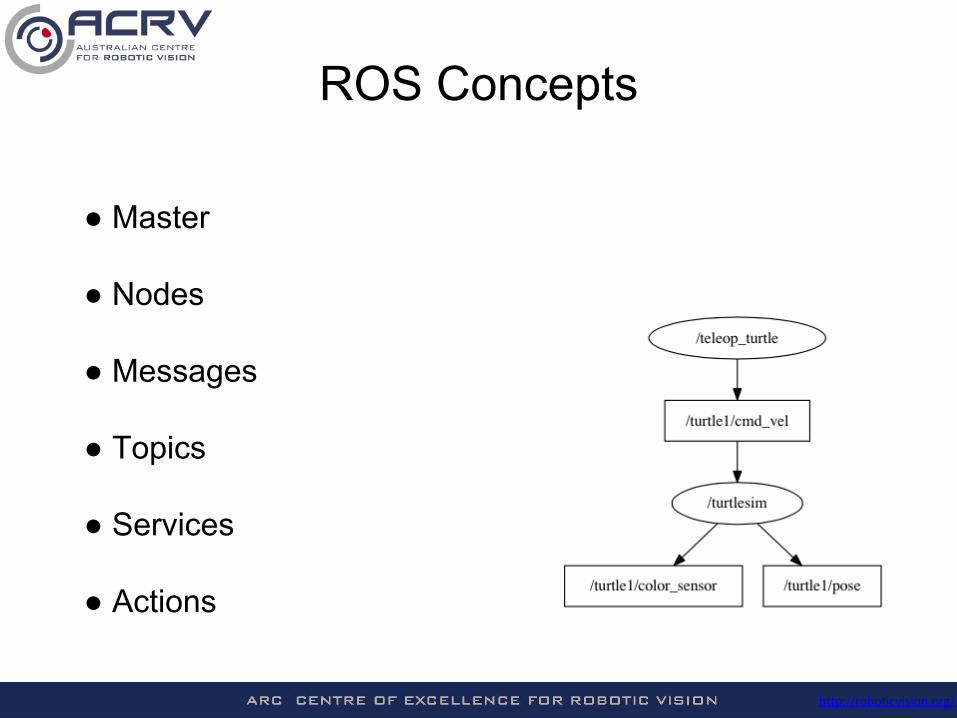
ROS Concepts
● Master
● Nodes
● Messages
● Topics
● Services
● Actions
http://roboticvision.org/
Try it out!
Using the same commands from before:
> rosnode list > rostopic list/rosout /rosout/teleop_turtle /turtle1/cmd_vel/turtlesim /turtle1/color_sensor
/turtle1/pose
> rosnode info /turtlesim
> rqt_graph
http://roboticvision.org/
Try it out!
How about the messages?
> rostopic echo /turtle1/cmd_vel...
> rostopic info /turtle1/cmd_velType: geometry_msgs/Twist...
> rosmsg show geometry_msgs/Twist...
http://roboticvision.org/
Logging & PlaybackTry it out!
We need three terminals to run:
> rosbag record /turtle1/cmd_vel -O test[ move the teleop-ed turtle …]^C
> rosbag info test.bagpath: test.bagduration: 0.6smessages: 7topics: /turtle1/cmd_vel 7 msgs : geometry_msgs/Twist
> rosbag play test.bag
http://roboticvision.org/
> mkdir -p ~/catkin_ws/src> cd ~/catkin_ws/src> catkin_init_workspace
> cd ~/catkin_ws> catkin_make
> source devel/setup.bash
a flexible way of building your projects (CMake inspired)
ROS Workspaces
Try it out!
http://roboticvision.org/
We want you to send data (msgs),from one running node to another!
#!/usr/bin/env python #!/usr/bin/env python
# Publisher # Publisher
import rospy import rospy
from std_msgs.msg import String from std_msgs.msg import String
... ...
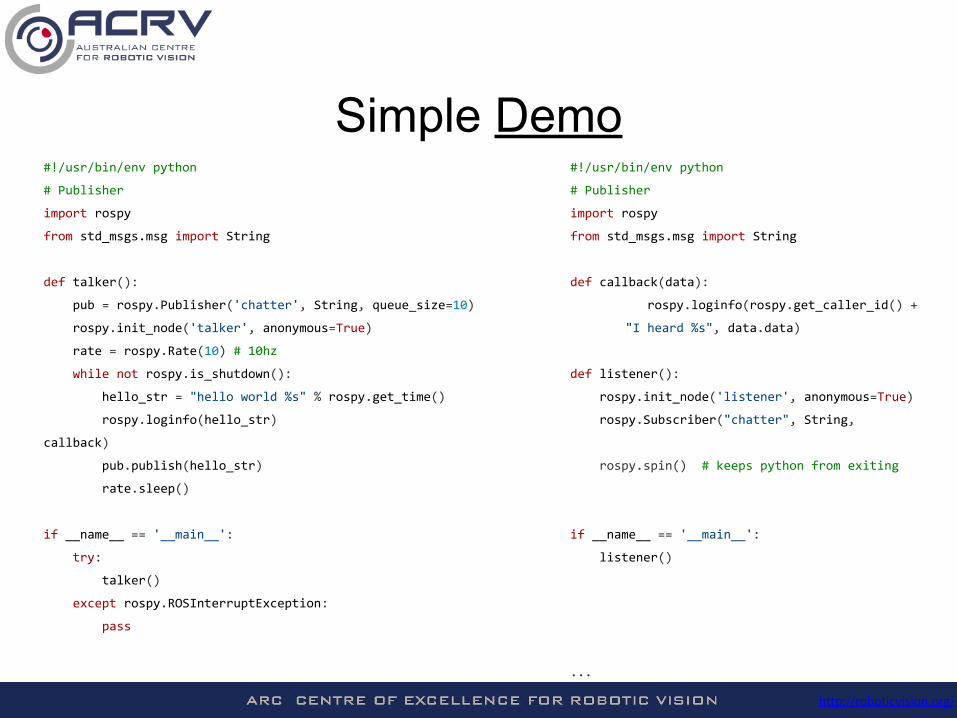
Simple Demo
Try it out!
http://roboticvision.org/
#!/usr/bin/env python #!/usr/bin/env python
# Publisher # Publisher
import rospy import rospy
from std_msgs.msg import String from std_msgs.msg import String
def talker(): def callback(data):
pub = rospy.Publisher('chatter', String, queue_size=10) rospy.loginfo(rospy.get_caller_id() +
rospy.init_node('talker', anonymous=True) "I heard %s", data.data)
rate = rospy.Rate(10) # 10hz
while not rospy.is_shutdown(): def listener():
hello_str = "hello world %s" % rospy.get_time() rospy.init_node('listener', anonymous=True)
rospy.loginfo(hello_str) rospy.Subscriber("chatter", String,
callback)
pub.publish(hello_str) rospy.spin() # keeps python from exiting
rate.sleep()
if __name__ == '__main__': if __name__ == '__main__':
try: listener()
talker()
except rospy.ROSInterruptException:
pass
...
Simple Demo
http://roboticvision.org/
No, ROS is much, much more
● build system (catkin)● coordinate frame transformations (tf)● parameter server (rosparam)● visualization (rviz)● GUI & monitoring (rqt)● ...● your tool to do something awesome™
That’s it?
http://roboticvision.org/
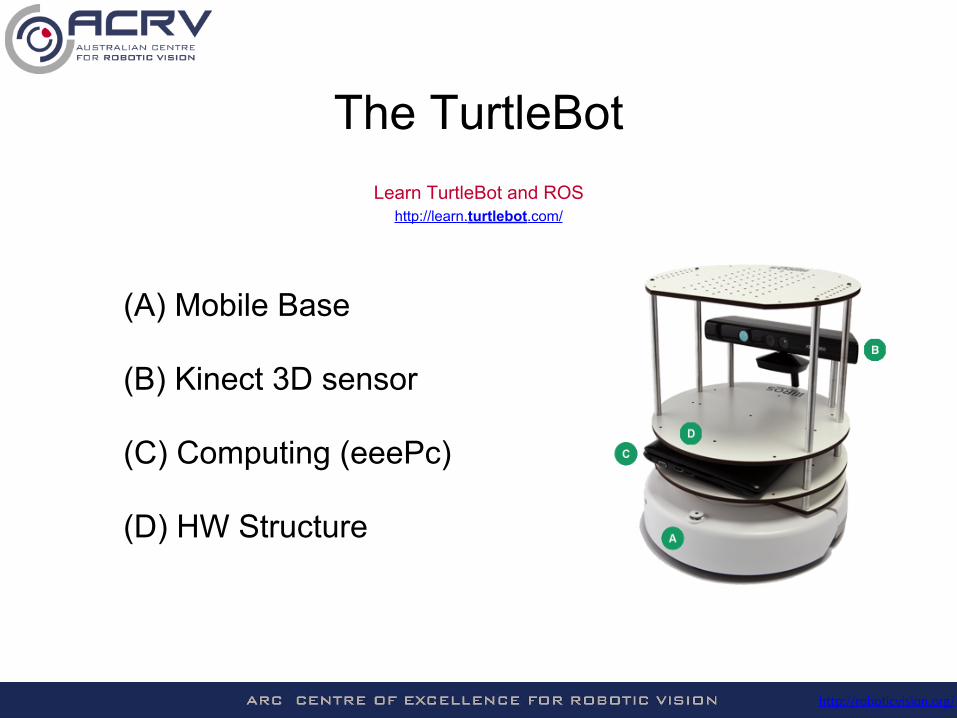
(A) Mobile Base
(B) Kinect 3D sensor
(C) Computing (eeePc)
(D) HW Structure
The TurtleBotLearn TurtleBot and ROS
http://learn.turtlebot.com/
http://roboticvision.org/
Further Reading
● Morgan Quigley et al. (2009) ROS: an open-source Robot Operating System
● J. M. O'Kane. A Gentle Introduction to ROS: http://www.cse.sc.edu/~jokane/agitr/
● http://wiki.ros.org/ROS/StartGuide
● http://wiki.ros.org/ROS/Tutorials/WhereNext
● Lost? Ask us! And check http://wiki.ros.org & http://answers.ros.org
● http://robohow.eu/_media/meetings/first-integration-workshop/ros-best-practices.pdf



















![ACRV Research Fellow Intro/Tutorial [Vision and Action]](https://img.pdfslide.us/doc/110x75/55a89c331a28ab9e188b4612/acrv-research-fellow-introtutorial-vision-and-action.jpg)









