Embed Size (px)
Citation preview

Performance of Evolutionary Algorithms on NKLandscapes with Nearest Neighbor Interactions
and Tunable Overlap
Martin Pelikan, Kumara Sastry, David E. Goldberg,Martin V. Butz, and Mark Hauschild
Missouri Estimation of Distribution Algorithms Laboratory (MEDAL)University of Missouri, St. Louis, MO
http://medal.cs.umsl.edu/[email protected]
Download MEDAL Report No. 2009002
http://medal.cs.umsl.edu/files/2009002.pdf
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

Motivation
Testing evolutionary algorithms
I Adversarial problems on the boundary of design envelope.I Random instances of important classes of problems.I Real-world problems.
This work bridges and extends two prior studies on randomproblems
I Random additively decomposable problems (rADPs)(Pelikan et al., 2006).
I NK landscapes (superset of rADPs)(Pelikan et al., 2007).
This study
I Propose the class of polynomially solvable NK landscapes withnearest neighbor interactions and tunable overlap.
I Generate large number of instances of proposed problem class.I Test evolutionary algorithms on the generated instances.I Analyze the results.
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

Outline
1. Additively decomposable problems
I NK landscapes.
I Random additively decomposable problems (rADPs).
2. NK with nearest neighbors and tunable overlap.
3. Experiments.
4. Conclusions and future work.
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

Additively Decomposable Problems (ADPs)
Additively decomposable problem (ADP)
I Fitness defined as
f(X1, X2, . . . , Xn) =m∑
i=1
fi(Si),
I n is the number of bits (variables),I m is the number of subproblems,I Si is the subset of variables in ith subproblem.
I ADPs play crucial role in design and analysis of GAs & EDAs.I All problems in this work are ADPs.
Two prior studies on ADPs serve as starting points
I Unrestricted NK landscapes.I Restricted random ADPs (rADPs).
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

NK Landscape
NK landscape
I Proposed by Kauffman (1989).
I Model of rugged landscape and popular test function.I An NK landscape is defined by
I Number of bits, n.I Number of neighbors per bit, k.I Set of k neighbors Π(Xi) for i-th bit, Xi.I Subfunction fi defining contribution of Xi and Π(Xi).
I The objective function fnk to maximize is then defined as
fnk(X0, X1, . . . , Xn−1) =n−1∑i=0
fi(Xi,Π(Xi)).
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

NK Landscape
Exmaple for n = 9 and k = 2:
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

Restricted Random ADPs (rADPs) of Bounded Order
Order-k rADPs with and without overlap
I Each subproblem contains k bits.
I Separable problems contain non-overlapping subproblems:Tight linkage: Shuffled:
I There may be overlap in o bits between neighboringsubproblems (may also be shuffled):Tight linkage: Shuffled:
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

Properties of NK Landscapes and rADPs
Common properties
I Additive decomposability.I Subproblems are complex (look-up tables).I High multimodality, complex structure.I Overlap further increases problem difficulty.I Challenge for most genetic algorithms and local search.
NK landscapes
I NP-completeness (can’t solve worst case in polynomial time).
rADPs
I Using prior knowledge of problem structure, we can exactlysolve rADPs in polynomial time (dynamic programming) inO(2kn) evaluations.
I Multivariate EDAs can solve shuffled EDAs polynomially fast.
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

NK Landscapes with Nearest Neighbors & Tunable Overlap
NK Landscapes with Nearest Neighbors and Tunable Overlap
I Neighbors of each bit are restricted to the following k bits.
I For simplicity, the neighborhoods don’t wrap around.I Some subproblems may be excluded to provide a mechanism
for tuning the size of overlap.I Use parameter step ∈ {1, 2, . . . , k + 1}.I Only subproblems at positions i, i mod step = 0 contribute.
I Bit positions shuffled randomly to eliminate tight linkage.
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

NK Landscapes with Nearest Neighbors & Tunable Overlap
High overlap (k = 2, step = 1):
Sequential Shuffled
Notestep = 1 maximizes the amount of overlap between subproblems.
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

NK Landscapes with Nearest Neighbors & Tunable Overlap
Low overlap (k = 2, step = 2):
Sequential Shuffled
Notestep parameter allows tuning of the size of overlap.
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

NK Landscapes with Nearest Neighbors & Tunable Overlap
No overlap (k = 2, step = 3):
Sequential Shuffled
Notestep = k + 1 implies separability (subproblems are independent).
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

NK Landscapes with Nearest Neighbors & Tunable Overlap
Why?
I Nearest neighbors enable polynomial solvabilityI Deshuffle the string.I Use dynamic programming.
I Parameter step enables tunining the overlap betweensubproblems:
I For standard NK landscapes, step = 1.I With larger values of step, the amount of overlap between
consequent subproblems is reduced.I For step = k + 1, the problem becomes separable (the
subproblems are fully independent).
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

Problem Instances
Parameters
I n = 20 to 120.
I k = 2 to 5.
I step = 1 to k + 1 for each k.
Variety of instances
I For each (n, k, step), generate 10,000 random instances.
I Overall 1,800,000 unique problem instances.
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

Compared Algorithms
Basic algorithms
I Hierarchical Bayesian optimization algorithm (hBOA).
I Genetic algorithm with uniform crossover (GAU).
I Genetic algorithm with twopoint crossover (G2P).
Local search
I Single-bit-flip hill climbing (DHC) on each solution.
I Improves performance of all methods.
Niching
I Restricted tournament replacement (niching).
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

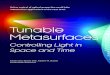
Results: Flips Until Optimum; hBOA; k = 2 and k = 5
20 40 60 80 10010
2
103
104
Problem size
Num
ber
of fl
ips
(hB
OA
)
k=2, step=1k=2, step=2k=2, step=3
20 40 60 80 10010
2
103
104
Problem size
Num
ber
of fl
ips
(hB
OA
)
k=3, step=1k=3, step=2k=3, step=3k=3, step=4
20 40 60 80 10010
2
103
104
Problem size
Num
ber
of fl
ips
(hB
OA
)
k=4, step=1k=4, step=2k=4, step=3k=4, step=4k=4, step=5
20 40 60 80 100
103
104
105
Problem size
Num
ber
of fl
ips
(hB
OA
)
k=5, step=1k=5, step=2k=5, step=3k=5, step=4k=5, step=5k=5, step=6
Figure 1: Average number of flips for hBOA.
To visualize the effects of k on performance of all compared algorithms, figure 6 shows thegrowth of the number of DHC flips with k for hBOA and GA on problems of size n = 120; theresults for UMDA are not included, because UMDA was incapable of solving many instances ofthis size in practical time. Two cases are considered: (1) step = 1, corresponding to standardNK landscapes and (2) step = k + 1, corresponding to the separable problem with no interactionsbetween the different subproblems. For both cases, the vertical axis is shown in log-scale to supportthe hypothesis that the time complexity of selectorecombinative genetic algorithms should growexponentially fast with the order of problem decomposition even when recombination is capableof identifying and processing the subproblems in an adequate problem decomposition. The resultsconfirm this hypothesis—indeed, the number of flips for all algorithms appears to grow at leastexponentially fast with k, regardless of the value of the step parameter.
5.5 Comparison of All Algorithms
How do the different algorithms compare in terms of performance? While it is difficult to comparethe exact running times due to the variety of computer hardware used and the accuracy of timemeasurements, we can easily compare other recorded statistics, such as the number of DHC flipsor the number of evaluations until optimum. The main focus is again on the number of DHCflips because for each fitness evaluation at least one flip is typically performed and that is why thenumber of flips is expected to be greater or equal than both the number of evaluations as well asthe product of the population size and the number of generations.
One of the most straightforward approaches to quantify relative performance of two algorithmsis to compute the ratio of the number of DHC flips (or some other statistic) for each probleminstance. The mean and other moments of the empirical distribution of these ratios can then beestimated for different problem sizes and problem types. The results can then be used to better
8
20 40 60 80 10010
2
103
104
Problem size
Num
ber
of fl
ips
(hB
OA
)
k=2, step=1k=2, step=2k=2, step=3
20 40 60 80 10010
2
103
104
Problem size
Num
ber
of fl
ips
(hB
OA
)
k=3, step=1k=3, step=2k=3, step=3k=3, step=4
20 40 60 80 10010
2
103
104
Problem size
Num
ber
of fl
ips
(hB
OA
)
k=4, step=1k=4, step=2k=4, step=3k=4, step=4k=4, step=5
20 40 60 80 100
103
104
105
Problem size
Num
ber
of fl
ips
(hB
OA
)
k=5, step=1k=5, step=2k=5, step=3k=5, step=4k=5, step=5k=5, step=6
Figure 1: Average number of flips for hBOA.
To visualize the effects of k on performance of all compared algorithms, figure 6 shows thegrowth of the number of DHC flips with k for hBOA and GA on problems of size n = 120; theresults for UMDA are not included, because UMDA was incapable of solving many instances ofthis size in practical time. Two cases are considered: (1) step = 1, corresponding to standardNK landscapes and (2) step = k + 1, corresponding to the separable problem with no interactionsbetween the different subproblems. For both cases, the vertical axis is shown in log-scale to supportthe hypothesis that the time complexity of selectorecombinative genetic algorithms should growexponentially fast with the order of problem decomposition even when recombination is capableof identifying and processing the subproblems in an adequate problem decomposition. The resultsconfirm this hypothesis—indeed, the number of flips for all algorithms appears to grow at leastexponentially fast with k, regardless of the value of the step parameter.
5.5 Comparison of All Algorithms
How do the different algorithms compare in terms of performance? While it is difficult to comparethe exact running times due to the variety of computer hardware used and the accuracy of timemeasurements, we can easily compare other recorded statistics, such as the number of DHC flipsor the number of evaluations until optimum. The main focus is again on the number of DHCflips because for each fitness evaluation at least one flip is typically performed and that is why thenumber of flips is expected to be greater or equal than both the number of evaluations as well asthe product of the population size and the number of generations.
One of the most straightforward approaches to quantify relative performance of two algorithmsis to compute the ratio of the number of DHC flips (or some other statistic) for each probleminstance. The mean and other moments of the empirical distribution of these ratios can then beestimated for different problem sizes and problem types. The results can then be used to better
8
I Growth appears to be polynomial w.r.t. problem size, n.
I Performance best with no overlap.
I Besides n, performance depends on both k and step.
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

Results: Comparison w.r.t. Flips
DHC steps (flips) until optimumn k step hBOA GA (uniform) GA (twopoint)
120 5 1 37,155 141,108 220,318120 5 2 40,151 212,635 353,748120 5 3 37,480 249,217 443,570120 5 4 27,411 195,673 310,894120 5 5 15,589 100,378 145,406120 5 6 9,607 35,101 47,576
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

Results: Comparison w.r.t. Evaluations
Number of evaluations until optimumn k step hBOA GA (uniform) GA (twopoint)
120 5 1 7,414 16,519 34,696120 5 2 9,011 25,032 56,059120 5 3 9,988 30,285 72,359120 5 4 8,606 24,016 51,521120 5 5 7,307 13,749 26,807120 5 6 7,328 6,004 10,949
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

Results: Flips Until Optimum; hBOA vs. GA; k = 5
20 40 60 80 1000.4
0.5
0.6
0.7
0.8
Problem size
Num
ber
of fl
ips
(GA
, uni
form
) /
Num
ber
of fl
ips
(hB
OA
)
k=2, step=1k=2, step=2k=2, step=3
20 40 60 80 1000.5
0.75
1
1.25
Problem sizeN
umbe
r of
flip
s (G
A, u
nifo
rm)
/N
umbe
r of
flip
s (h
BO
A)
k=3, step=1k=3, step=2k=3, step=3k=3, step=4
20 40 60 80 100
1
2
3
4
Problem size
Num
ber
of fl
ips
(GA
, uni
form
) /
Num
ber
of fl
ips
(hB
OA
)
k=4, step=1k=4, step=2k=4, step=3k=4, step=4k=4, step=5
20 40 60 80 100
1
2
3
4567
Problem size
Num
ber
of fl
ips
(GA
, uni
form
) /
Num
ber
of fl
ips
(hB
OA
)
k=5, step=1k=5, step=2k=5, step=3k=5, step=4k=5, step=5k=5, step=6
Figure 7: Ratio of the number of flips for GA with uniform crossover and hBOA.
Number of DHC flips until optimumn k step hBOA GA (uniform) GA (twopoint)
120 5 1 37,155 141,108 220,318120 5 2 40,151 212,635 353,748120 5 3 37,480 249,217 443,570120 5 4 27,411 195,673 310,894120 5 5 15,589 100,378 145,406120 5 6 9,607 35,101 47,576
Table 1: Comparison of the number of DHC flips until optimum for hBOA and GA. For all settings,the superiority of the results obtained by hBOA was verified with paired t-test with 99% confidence.
tributions of the best and the second best instances of a subproblem, and the noise models fitnesscontributions of other subproblems (Goldberg & Rudnick, 1991; Goldberg, Deb, & Clark, 1992).The smaller the signal-to-noise ratio, the larger the expected population size as well as the overallcomplexity of an algorithm. As was discussed above, the signal-to-noise ratio is influenced primarilyby the value of n; however, the signal-to-noise ratio also depends on the subproblems themselves.The influence of the signal-to-noise ratio on algorithm performance should be strongest for sepa-rable problems with uniform scaling where all subproblems have approximately the same signal;for problems with overlap and nonuniform scaling, other factors contribute to instance difficulty aswell. Another important factor influencing problem difficulty of decomposable problems is the scal-ing of the signal coming from different subproblems (Thierens, Goldberg, & Pereira, 1998). Nextwe examine the influence of the signal-to-noise ratio and scaling on performance of the comparedalgorithms in more detail.
Figure 14 visualizes the effects of signal-to-noise ratio on the number of flips until optimum
13
20 40 60 80 1000.4
0.5
0.6
0.7
0.8
Problem size
Num
ber
of fl
ips
(GA
, tw
opoi
nt)
/N
umbe
r of
flip
s (h
BO
A)
k=2, step=1k=2, step=2k=2, step=3
20 40 60 80 1000.5
0.75
1
1.25
Problem size
Num
ber
of fl
ips
(GA
, tw
opoi
nt)
/N
umbe
r of
flip
s (h
BO
A)
k=3, step=1k=3, step=2k=3, step=3k=3, step=4
20 40 60 80 100
1
2
3
4
Problem size
Num
ber
of fl
ips
(GA
, tw
opoi
nt)
/N
umbe
r of
flip
s (h
BO
A)
k=4, step=1k=4, step=2k=4, step=3k=4, step=4k=4, step=5
20 40 60 80 100
1
2
3
4
567
Problem size
Num
ber
of fl
ips
(GA
, tw
opoi
nt)
/N
umbe
r of
flip
s (h
BO
A)
k=5, step=1k=5, step=2k=5, step=3k=5, step=4k=5, step=5k=5, step=6
Figure 8: Ratio of the number of flips for GA with twopoint crossover and hBOA.
for n = 120, k = 5, and step ∈ {1, 6}; since UMDA was not capable of solving many of theseproblem instances in practical time, the results for UMDA are not included. The figure shows theaverage number of DHC flips until optimum for different percentages of instances with smallestsignal-to-noise ratios. To make the visualization more effective, the number of flips is normalizedby dividing the values by the mean number of flips over the entire set of instances. The resultsclearly show that for the separable problems (that is, step = 6), the smaller the signal-to-noiseratio, the greater the number of flips. However, for problem instances with strong overlap (that is,step = 1), problem difficulty does not appear to be directly related to the signal-to-noise ratio andthe primary source of problem difficulty appears to be elsewhere.
Figure 15 visualizes the influence of scaling on the number of flips until optimum. The figureshows the average number of flips until optimum for different percentages of instances with smallestsignal variance. The larger the variance of the signal, the less uniformly the signal is distributed be-tween the different subproblems. For the separable problem (that is, step = 6), the more uniformlyscaled instances appear to be more difficult for all compared algorithms than the less uniformlyscaled ones. For instances with strong overlap (that is, step = 1), the effects of scaling on algorithmperformance are negligible; again, the source of problem difficulty appears to be elsewhere.
Two observations related to the signal-to-noise ratio and scaling are somewhat surprising:(1) Although scalability of selectorecombinative GAs gets worse with nonuniform scaling of sub-problems, the results indicate that the actual performance is better on more nonuniformly scaledproblems. (2) Performance of the compared algorithms on problems with strong overlap does notappear to be directly affected by signal-to-noise ratio or signal variance. How could these resultsbe explained?
We believe that the primary reason why more uniformly scaled problems are more difficult forall tested algorithms is related to effectiveness of recombination. More specifically, practically anyrecombination operator becomes more effective when the scaling is highly nonuniform; on the other
14
I hBOA outperforms both versions of GA.
I Differences grow faster than polynomially with n.
I Besides n, differences depend on both k and step.
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

Results: Correlations Between Algorithms
step = 1 (high overlap):
step = 6 (separable):
I GA versions more similar than hBOA with GA.I Correlations stronger for problems with more overlap/less
structure.
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

Problem Difficulty: Signal-to-Noise and Signal Variance
Signal and noise
I Signal: The difference between fitness of the best and the 2nd
best solutions to a subproblem.I Noise: Models contributions of other subproblems.
Signal-to-noise ratio
I Decision making done by GA is stochastic.I The larger the signal-to-noise ratio, the easier the decision
making.
Signal variance
I Sequential vs. parallel convergence.I How much do contributions of different subproblems differ?I One way to model this is to look at the variance of the signal.
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

Results: Flips Until Optimum; hBOA vs. GA; k = 5
step = 1 (high overlap) step = 6 (separable)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 14000
8000
16000
32000
Percentage of overlap
Num
ber
of fl
ips
k=5k=4k=3k=2
(a) hBOA
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12000
4000
8000
16000
32000
64000
128000
256000
512000
1024000
Percentage of overlap
Num
ber
of fl
ips
k=5k=4k=3k=2
(b) GA (uniform)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12000
4000
8000
16000
32000
64000
128000
256000
512000
1024000
Percentage of overlap
Num
ber
of fl
ips
k=5k=4k=3k=2
(c) GA (twopoint)
Figure 13: Influence of overlap for n = 120 and k = 5 (step varies with overlap).
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.95
0.975
1
1.025
1.05
1.075
Signal to noise percentile (% smallest)
Ave
rage
num
ber
of fl
ips
(div
ided
by
mea
n)
GA (twpoint)GA (uniform)hBOA
(a) step = 1
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.95
0.975
1
1.025
1.05
1.075
Signal to noise percentile (% smallest)
Ave
rage
num
ber
of fl
ips
(div
ided
by
mea
n)
GA (twpoint)GA (uniform)hBOA
(b) step = 6
Figure 14: Influence of signal-to-noise ratio on the number of flips for n = 120 and k = 5.
Acknowledgments
This project was sponsored by the National Science Foundation under CAREER grant ECS-0547013, by the Air Force Office of Scientific Research, Air Force Materiel Command, USAF,under grant FA9550-06-1-0096, and by the University of Missouri in St. Louis through the HighPerformance Computing Collaboratory sponsored by Information Technology Services, and theResearch Award and Research Board programs.
The U.S. Government is authorized to reproduce and distribute reprints for government pur-poses notwithstanding any copyright notation thereon. Any opinions, findings, and conclusions orrecommendations expressed in this material are those of the authors and do not necessarily reflectthe views of the National Science Foundation, the Air Force Office of Scientific Research, or theU.S. Government. Some experiments were done using the hBOA software developed by MartinPelikan and David E. Goldberg at the University of Illinois at Urbana-Champaign and most exper-iments were performed on the Beowulf cluster maintained by ITS at the University of Missouri inSt. Louis.
18
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 14000
8000
16000
32000
Percentage of overlap
Num
ber
of fl
ips
k=5k=4k=3k=2
(a) hBOA
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12000
4000
8000
16000
32000
64000
128000
256000
512000
1024000
Percentage of overlap
Num
ber
of fl
ips
k=5k=4k=3k=2
(b) GA (uniform)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12000
4000
8000
16000
32000
64000
128000
256000
512000
1024000
Percentage of overlap
Num
ber
of fl
ips
k=5k=4k=3k=2
(c) GA (twopoint)
Figure 13: Influence of overlap for n = 120 and k = 5 (step varies with overlap).
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.95
0.975
1
1.025
1.05
1.075
Signal to noise percentile (% smallest)
Ave
rage
num
ber
of fl
ips
(div
ided
by
mea
n)
GA (twpoint)GA (uniform)hBOA
(a) step = 1
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.95
0.975
1
1.025
1.05
1.075
Signal to noise percentile (% smallest)
Ave
rage
num
ber
of fl
ips
(div
ided
by
mea
n)
GA (twpoint)GA (uniform)hBOA
(b) step = 6
Figure 14: Influence of signal-to-noise ratio on the number of flips for n = 120 and k = 5.
Acknowledgments
This project was sponsored by the National Science Foundation under CAREER grant ECS-0547013, by the Air Force Office of Scientific Research, Air Force Materiel Command, USAF,under grant FA9550-06-1-0096, and by the University of Missouri in St. Louis through the HighPerformance Computing Collaboratory sponsored by Information Technology Services, and theResearch Award and Research Board programs.
The U.S. Government is authorized to reproduce and distribute reprints for government pur-poses notwithstanding any copyright notation thereon. Any opinions, findings, and conclusions orrecommendations expressed in this material are those of the authors and do not necessarily reflectthe views of the National Science Foundation, the Air Force Office of Scientific Research, or theU.S. Government. Some experiments were done using the hBOA software developed by MartinPelikan and David E. Goldberg at the University of Illinois at Urbana-Champaign and most exper-iments were performed on the Beowulf cluster maintained by ITS at the University of Missouri inSt. Louis.
18
I For separable problems, noise clearly matters.
I For problems with overlap, noise appears insignificant.
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

Results: Flips Until Optimum; hBOA vs. GA; k = 5
step = 1 (high overlap) step = 6 (separable)
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.95
0.975
1
1.025
1.05
1.075
1.1
Signal variance percentile (% smallest)
Ave
rage
num
ber
of fl
ips
(div
ided
by
mea
n)
GA (twopoint)GA (uniform)hBOA
(a) step = 1
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.95
0.975
1
1.025
1.05
1.075
1.1
Signal variance percentile (% smallest)
Ave
rage
num
ber
of fl
ips
(div
ided
by
mea
n)
GA (twopoint)GA (uniform)hBOA
(b) step = 6
Figure 15: Influence of signal variance on the number of flips for n = 120 and k = 5.
References
Ackley, D. H. (1987). An empirical study of bit vector function optimization. Genetic Algorithmsand Simulated Annealing , 170–204.
Aguirre, H. E., & Tanaka, K. (2003). Genetic algorithms on nk-landscapes: Effects of selection,drift, mutation, and recombination. In Raidl, G. R., et al. (Eds.), Applications of EvolutionaryComputing: EvoWorkshops 2003 (pp. 131–142).
Altenberg, L. (1997). NK landscapes. In Back, T., Fogel, D. B., & Michalewicz, Z. (Eds.), Hand-book of Evolutionary Computation (pp. B2.7:5–10). Bristol, New York: Institute of PhysicsPublishing and Oxford University Press.
Baluja, S. (1994). Population-based incremental learning: A method for integrating genetic searchbased function optimization and competitive learning (Tech. Rep. No. CMU-CS-94-163). Pitts-burgh, PA: Carnegie Mellon University.
Barnes, J. W., Dimova, B., Dokov, S. P., & Solomon, A. (2003). The theory of elementarylandscapes. Appl. Math. Lett., 16 (3), 337–343.
Cheeseman, P., Kanefsky, B., & Taylor, W. M. (1991). Where the really hard problems are.Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI-91), 331–337.
Chickering, D. M., Heckerman, D., & Meek, C. (1997). A Bayesian approach to learning Bayesiannetworks with local structure (Technical Report MSR-TR-97-07). Redmond, WA: MicrosoftResearch.
Choi, S.-S., Jung, K., & Kim, J. H. (2005). Phase transition in a random NK landscape model.pp. 1241–1248.
Coffin, D. J., & Smith, R. E. (2007). Why is parity hard for estimation of distribution algorithms?Proceedings of the Genetic and Evolutionary Computation Conference (GECCO-2007), 624–624.
Deb, K., & Goldberg, D. E. (1991). Analyzing deception in trap functions (IlliGAL Report No.91009). Urbana, IL: University of Illinois at Urbana-Champaign, Illinois Genetic AlgorithmsLaboratory.
Friedman, N., & Goldszmidt, M. (1999). Learning Bayesian networks with local structure. InJordan, M. I. (Ed.), Graphical models (pp. 421–459). Cambridge, MA: MIT Press.
19
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.95
0.975
1
1.025
1.05
1.075
1.1
Signal variance percentile (% smallest)
Ave
rage
num
ber
of fl
ips
(div
ided
by
mea
n)
GA (twopoint)GA (uniform)hBOA
(a) step = 1
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.95
0.975
1
1.025
1.05
1.075
1.1
Signal variance percentile (% smallest)
Ave
rage
num
ber
of fl
ips
(div
ided
by
mea
n)
GA (twopoint)GA (uniform)hBOA
(b) step = 6
Figure 15: Influence of signal variance on the number of flips for n = 120 and k = 5.
References
Ackley, D. H. (1987). An empirical study of bit vector function optimization. Genetic Algorithmsand Simulated Annealing , 170–204.
Aguirre, H. E., & Tanaka, K. (2003). Genetic algorithms on nk-landscapes: Effects of selection,drift, mutation, and recombination. In Raidl, G. R., et al. (Eds.), Applications of EvolutionaryComputing: EvoWorkshops 2003 (pp. 131–142).
Altenberg, L. (1997). NK landscapes. In Back, T., Fogel, D. B., & Michalewicz, Z. (Eds.), Hand-book of Evolutionary Computation (pp. B2.7:5–10). Bristol, New York: Institute of PhysicsPublishing and Oxford University Press.
Baluja, S. (1994). Population-based incremental learning: A method for integrating genetic searchbased function optimization and competitive learning (Tech. Rep. No. CMU-CS-94-163). Pitts-burgh, PA: Carnegie Mellon University.
Barnes, J. W., Dimova, B., Dokov, S. P., & Solomon, A. (2003). The theory of elementarylandscapes. Appl. Math. Lett., 16 (3), 337–343.
Cheeseman, P., Kanefsky, B., & Taylor, W. M. (1991). Where the really hard problems are.Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI-91), 331–337.
Chickering, D. M., Heckerman, D., & Meek, C. (1997). A Bayesian approach to learning Bayesiannetworks with local structure (Technical Report MSR-TR-97-07). Redmond, WA: MicrosoftResearch.
Choi, S.-S., Jung, K., & Kim, J. H. (2005). Phase transition in a random NK landscape model.pp. 1241–1248.
Coffin, D. J., & Smith, R. E. (2007). Why is parity hard for estimation of distribution algorithms?Proceedings of the Genetic and Evolutionary Computation Conference (GECCO-2007), 624–624.
Deb, K., & Goldberg, D. E. (1991). Analyzing deception in trap functions (IlliGAL Report No.91009). Urbana, IL: University of Illinois at Urbana-Champaign, Illinois Genetic AlgorithmsLaboratory.
Friedman, N., & Goldszmidt, M. (1999). Learning Bayesian networks with local structure. InJordan, M. I. (Ed.), Graphical models (pp. 421–459). Cambridge, MA: MIT Press.
19
I For separable problems, signal variance clearly matters.
I For problems with overlap, signal variance appearsinsignificant.
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

Conclusions and Future Work
Summary and conclusions
I Considered subset of NK landscapes as class of random testproblems with tunable subproblem size and overlap.
I All proposed instances solvable in polynomial time.I Generated a broad range of problem instances.I Analyzed results using hybrids of GEAs.
Future work
I Use generated problems to test other algorithms.I Relate performance to other measures of problem difficulty.I Develop/test new tools for understanding of problem difficulty.I Wrap subproblems around.I Use other distributions for generating look-up tables.
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap

Acknowledgments
Acknowledgments
I NSF; NSF CAREER grant ECS-0547013.
I U.S. Air Force, AFOSR; FA9550-06-1-0096.
I University of Missouri; High Performance ComputingCollaboratory sponsored by Information Technology Services;Research Award; Research Board.
M. Pelikan, K. Sastry, D.E. Goldberg, M.V. Butz, M. Hauschild NK Landscapes with Nearest Neighbors and Tunable Overlap