Embed Size (px)
Citation preview

IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 61, NO. 1, JANUARY 2012 297
Maximal Scheduling in Wireless Ad Hoc NetworksWith Hypergraph Interference Models
Qiao Li, Student Member, IEEE, and Rohit Negi, Member, IEEE
Abstract—This paper proposes a hypergraph interferencemodel for the scheduling problem in wireless ad hoc networks.The proposed hypergraph model can take the sum interferenceinto account and, therefore, is more accurate as compared withthe traditional binary graph model. Further, different from theglobal signal-to-interference-plus-noise ratio (SINR) model, thehypergraph model preserves a localized graph-theoretic structureand, therefore, allows the existing graph-based efficient schedul-ing algorithms to be extended to the cumulative interferencecase. Finally, by adjusting certain parameters, the hypergraphcan achieve a systematic tradeoff between the interference ap-proximation accuracy and the user node coordination complexityduring scheduling. As an application of the hypergraph model,we consider the performance of a simple distributed schedulingalgorithm, i.e., maximal scheduling, in wireless networks. Wepropose a lower bound stability region for any maximal schedulerand show that it achieves a fixed fraction of the optimal stabilityregion, which depends on the interference degree of the underlyinghypergraph. We also demonstrate the interference approximationaccuracy of hypergraphs in random networks and show that hy-pergraphs with small hyperedge sizes can model the interferencequite accurately. Finally, the analytical performance is verified bysimulation results.
Index Terms—Ad hoc networks, interference, scheduling, sta-bility, wireless networks.
I. INTRODUCTION
W IRELESS ad hoc network technologies, in particularvehicular ad hoc networks (VANETs), are envisioned to
play an important role in future transportation systems [2]. Asthese networks are spontaneously formed by vehicles travelingon the road, VANETs can deliver both critical traffic accidentor traffic jam messages [3] and useful commercial information[4] to drivers with low latency using direct vehicle-to-vehiclecommunications. Further, compared with the cellular approach,VANETs do not charge any service fee, as no existing telecom-munication infrastructure is used. In the past, VANETS havebeen identified as a key technology in enhancing road safetyand transportation efficiency, as well as reducing environmental
Manuscript received February 23, 2011; revised June 29, 2011 andSeptember 12, 2011; accepted October 16, 2011. Date of publicationNovember 18, 2011; date of current version January 20, 2012. This workwas supported in part by the United States National Science Foundationunder Award CNS-0831973 and Award ECCS-0931978 and in part by UnitedStates Army Research Office under Award W911NF0710287. This paper waspresented in part at the IEEE International Conference on Communications,Beijing, China, May 2008. The review of this paper was coordinated by Prof.V. W. S. Wong.
The authors are with the Department of Electrical and Computer Engi-neering, Carnegie Mellon University, Pittsburgh, PA 15213 USA (e-mail:[email protected]; [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TVT.2011.2176520
impacts [2]. It is expected that, as increasingly more vehiclesare equipped with wireless communication capabilities, large-scale VANETs will be developed in the near future.
One central technical challenge in the development of large-scale VANETs is the design of medium access control (MAC)mechanisms [2], [5]–[7]. In fact, such a problem is well knownto be NP-hard [8] for generic wireless networks due to thefundamental property of shared wireless spectrum for wire-less communications. This implies that the transmission ofany link will be received as interference by any unintendedreceiver, thereby impairing its own communication quality. ForVANETs, the MAC design is more challenging, as no centralcommunication coordinator can be assumed [2], due to therapid changes in the network topological properties as inducedby high user mobility. Thus, the MAC layer of VANETs has tonot only specify how the limited amount of bandwidth shouldefficiently be allocated among spatially separated contendingusers but achieve such allocation in a distributed fashion, aswell, even if the cumulative interference comes from users thatare arbitrarily located in the network.
In this paper, we try to address the MAC mechanism designin VANETs by adopting a low complexity distributed schedul-ing approach. The proposed scheduling algorithm can also beapplied to other types of wireless ad hoc networks. The reasonin choosing the scheduling approach is that, compared withvarious types of MAC mechanisms in the past (e.g., [9]–[13]),the scheduling approach can effectively eliminate transmissioncollisions and consequently reduce retransmissions. Therefore,it can significantly improve the latency, increase the overallthroughput, and achieve higher energy efficiency. To motivatethe proposed scheduling algorithm, we first provide a briefliterature review on the past scheduling research.
Based on the adopted interference model, the past researchon scheduling can roughly be classified into two categories:1) the flow contention graph (also referred to as the protocolinterference model [14]) based scheduling, and 2) the physi-cal signal-to-interference-plus-noise ratio (SINR) based (alsocalled the physical interference model [14]) scheduling. We firstdiscuss the graph-based scheduling as follows.
A. Scheduling With the Graph Interference Model
A flow contention graph [11], [12], [15]–[18] approximatesthe interference as “binary.” This means that the transmissionin a particular link fails if and only if there is a concurrenttransmission in any neighboring link. For example, consider thefour-link wireless network in Fig. 1, where a flow contentiongraph can be constructed by, for example, placing a guard
0018-9545/$26.00 © 2011 IEEE
http://ieeexploreprojects.blogspot.com

298 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 61, NO. 1, JANUARY 2012
Fig. 1. Sample wireless network with four links, where square nodes are thetransmitters, and round nodes are the receivers. The dashed circle is the guardzone associated with link 1.
zone [20] with certain radius around the receiver of each link.Two links form an edge in the flow contention graph if one’stransmitter is in the guard zone associated with the other. Insuch a case, the flow contention graph for Fig. 1 has only oneedge {1, 2}. Therefore, a transmission schedule is valid as longas links 1 and 2 are not chosen simultaneously. Based on sucha graph interference model, many interesting scheduling algo-rithms [15]–[18], [21] have been proposed, whose performancelimits are often well understood, thanks to the deep and richfoundation of graph theory. This is particularly convenient forthe important class of low complexity distributed scheduling,such as maximal scheduling [15] and the longest queue first(LQF) scheduling [21], [22], where the throughput performanceis often specified by the metrics of the underlying interferencegraph, such as the “interference degree” and the “local poolingfactor.” In the literature, many key insights about the throughputperformance of such schedulers in practical wireless networkswere obtained by conducting graph-theoretic analysis underdifferent physical layer specifications [15], [23].
However, the graph model has also been recognized as arigid model, which oversimplifies the interference constraintsin wireless networks [19], [24]–[26] since it does not take intoaccount the cumulative effect of interference. For example, inFig. 1, it is possible that link 1 fails when links {1, 3, 4} arescheduled due to the sum interference from both links 3 and4. In such a case, the graph model can only guarantee that thetransmission at link 1 is successful when only one of the othertwo links is transmitting due to its binary nature. On the otherhand, if one conservatively builds the graph by increasing thesize of the guard zone such that two additional edges {1, 3}and {1, 4} are included (note that both links 3 and 4 have thesame distance to link 1 in this example), the network capacityis reduced, because when link 1 transmits, neither link 2 norlink 3 is allowed to transmit, although there is no collision ifonly one of them transmits.
B. Scheduling With the Physical SINR Interference Model
Unlike the approximation-based graph model, the physicalSINR model can accurately describe the interference constraintin wireless networks. Under the SINR model, a transmissionschedule σ is valid if the SINR at any transmitting link isatisfies
Si
Ni +∑
k∈σ Iki≥ θi (1)
where Si is the received signal power at link i, Ni is thenoise power, Iki is the received interference at link i fromtransmitting link k, and θi is the SINR threshold for suc-cessful packet reception for link i, which is determined byphysical layer modulation, detection, and coding specifications.Recently, there has been a large body of work on designingefficient SINR-based scheduling algorithms in wireless net-works, such as optimal scheduling [7], [25], computationallyefficient scheduling with approximation bounds [26]–[31], andsimulation-based heuristic scheduling algorithms [32]. Further,there have also been numerous attempts to achieve decentral-ized implementations [33]–[35].
Despite the recent research efforts on SINR-based schedul-ing, it is widely recognized that the design and analysis ofefficient scheduling algorithms under the SINR model, in par-ticular, low complexity distributed scheduling, is still far frombeing solved. This is because of the fundamental global natureof the interference, namely, the transmission of any link willbe received by any other link in the network as interference,thereby impairing its own communication quality. This impliesthat any scheduling algorithm under the global SINR model willrequire coordinations among all the user nodes in the network,which makes it very difficult to design distributed schedulingalgorithms.
C. Summary of Contributions
In this paper, we consider a new interference model, i.e., theflow contention hypergraph, which can combine the advantagesof both the graph model and the physical SINR model whileavoiding their drawbacks. First, compared with the binarygraph model, the hypergraph achieves better approximationaccuracy by modeling cumulative interference constraints as“hyperedges,” where each hyperedge is a set of links that arenot allowed to transmit simultaneously due to the resulting in-tolerable cumulative interference experienced at certain links inthe hyperedge. Further, compared with the global SINR model,where distributed scheduling is particularly challenging, thehypergraph allows much easier scheduling design and analysisby extending the existing rich body of work on graph-basedscheduling due to the structural similarities between these twomodels. Finally, as a combination of the graph model and theSINR model, the hypergraph can achieve a systematic trade-off between the interference accuracy and user coordinationcomplexity. Such tradeoff can be observed by inspecting theconstruction of hyperedges, which is as follows. As a majorportion of the total interference is contributed by only a fewnearby transmitting links in typical wireless networks, we canapproximate the SINR locally with very good accuracy as
Si
Ni +∑
j∈σ Iji≈ Si
Ni +∑
j∈σ(Iji · 1j∈Li)
(2)
where 1{·} is an indicator function, i.e., 1true = 1 and 1false =0, and Li is the set of “local” links around link i, i.e.,
j ∈ Li ifSi
Ni + Iji< βi (3)
where βi is a properly chosen threshold. Based on the forego-ing SINR approximation, a hyperedge e = {i, i1, i2, . . . , ik−1}
http://ieeexploreprojects.blogspot.com

LI AND NEGI: MAXIMAL SCHEDULING IN WIRELESS NETWORKS WITH HYPERGRAPH INTERFERENCE MODELS 299
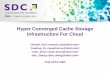
Fig. 2. (a) Star shaped network with nine links and (b) its flow contention graph under the “unidirectional equal power model” [15].
with cardinality k can be constructed if
Si
Ni +∑k−1
s=1 Iisi
< θi (4)
where the links {i1, i2, . . . , ik−1} are selected only if they arein Li so that the MAC coordination can be restricted onlyto local links. Thus, by adjusting {βi} and the maximumallowed hyperedge cardinality K, the interference accuracy cangradually be improved from the binary graph model (small βi
and K = 2) to the accurate SINR model (large βi and K = N ,which is the total number of links in the network). Note thatour model is different from the hypergraph model proposedin [19], which is essentially the physical SINR model, due tothe global hyperedge construction. Thus, their model faces thesame challenges in designing distributed scheduling algorithmsin wireless networks as the global SINR model. Further, theiranalysis is restricted to cellular networks. To the best of theauthors’ knowledge, this paper is the first application of thehypergraph model in general wireless ad hoc networks.
As another contribution of this paper, we analyze the per-formance of a class of low complexity distributed schedulingalgorithms, namely, maximal scheduling [15], under the hy-pergraph model. During scheduling, the only requirement isthat, if a link i has packets to transmit, either it transmits, orthere is a set of transmitting neighbors {i1, i2, . . . , ik−1} suchthat {i, i1, i2, . . . , ik−1} form a hyperedge. The scheduling isotherwise arbitrary. The maximal scheduling is simple and haslow complexity, which requires O(log N) in the worst case[16] for the graph interference model. It can even be approx-imately implemented with constant protocol overhead [36].The simplicity and localized nature of maximal schedulingmake it very attractive in wireless ad hoc networks, particu-larly VANETs, where local coordination is required to achieverobustness against various sources of uncertainties, such astopology changes by high user mobility. Note that there areother scheduling algorithms that can achieve better throughputguarantees, such as the LQF scheduling [21]. However, theperformance of LQF scheduling is achieved with global coor-dination among users in the network, which, despite the recentefforts in achieving localized coordinations [22], [31], can still
result in significant protocol overhead [O(N) in the worst case]and nonrobust behavior in the presence of high user mobility.On the other hand, low complexity maximal scheduling caneasily be implemented and is robust against user mobility dueto its local coordination.
For a given hypergraph, we characterize the throughput per-formance of maximal scheduling by proposing a lower boundstability region that can be achieved by any maximal scheduler,which includes the analysis in [15] as a special case. Further,we show that maximal scheduling can achieve at least 1/Δ ofthe optimal throughput, where Δ is defined as the “interferencedegree” of the hypergraph, a metric generalized from the graphcase. For a large class of hypergraph interference models, wherethe interference is locally approximated, maximal schedulingcan achieve a constant fraction of the optimal stability region.This is in contrast to the pessimistic conclusions drawn fromcertain graph models. For example, consider the star shapedwireless network in Fig. 2(a), whose contention graph is shownin Fig. 2(b), which is based on the “unidirectional equal powermodel” [15]. That is, two links cannot transmit together if one’stransmitter is within distance d of the other’s receiver, where dis the uniform link length. It has been proved [15] that maximalscheduling can achieve 1/(N − 1) of the optimal stability re-gion, where N is the number of links in the network. Now, it caneasily be shown that the number of (outside) links can grow ar-bitrarily large while still maintaining the star shape. Thus, in theworst case, maximal scheduling cannot guarantee any positivefraction of the optimal stability region. This pessimistic resultis due to the binary interference assumption, which allows aninfinite number of transmitting links in a fixed area, since notransmission fails from a single concurrent transmitting link.However, if we consider the cumulative interference, one caneasily see that the number of transmitting links in this networkis at most a constant since the area can be upper bounded.In such a case, a hypergraph model with a certain maximumhyperedge size can accurately model the interference in thisnetwork. Therefore, we conclude that maximal scheduling canstill achieve a constant fraction of the optimal stability regionin the worst case, which is fundamentally different from thepessimistic result given by the binary graph model.
http://ieeexploreprojects.blogspot.com

300 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 61, NO. 1, JANUARY 2012
Finally, we demonstrate the approximation accuracy of thehypergraph model by analyzing its outage probability in ran-dom infinite networks, where the nodes are described by aspatial Poisson point process (PPP), and the channels are sub-ject to Rayleigh fading. We obtain a closed-form expressionof the outage probabilities under the hypergraph interferencemodel with different maximum hyperedge sizes. Numericalresults show that a small hyperedge size is often quite accuratein approximating the total interference in wireless networks.The performance results of maximal scheduling with differenthypergraph models are verified by simulation results.
The remaining sections of this paper are organized as follows.In Section II, we introduce the system model, and in Section III,we analyze the performance of the scheduling algorithmswith hypergraph models. Section IV demonstrates the outageprobabilities of the hypergraph models, Section V shows thesimulation results, and finally, Section VI concludes this paper.
II. SYSTEM MODEL
In this section, we describe the system model and definethe scheduling problem at the MAC layer in wireless ad hocnetworks.
A. Hypergraph Interference Model
We assume that the wireless network consists of N links,which are denoted as the set V . The hypergraph interferencemodel is defined as H = (V, E), where V is the link set,and E is the set of hyperedges such that each hyperedgee = {i1, i2, . . . , ik} ∈ E consists of a subset of links, whichare not allowed to transmit together, due to the packetreception failure at one or more links in e from the strong suminterference. For example, in Fig. 1, if links 1, 3, and 4 transmittogether, then link 1 will fail due to the interference from bothlinks 3 and 4. Thus, one can form a hyperedge {1, 3, 4} sothat such a transmission mode is not allowed. Note, however,that {1, 3} is not a hyperedge, and therefore, links 1 and 3 canindeed transmit together. This distinction between the effectof sum interference and interference from a single link cannotbe captured by the conventional graph model. We require thatthe hyperedges should be constructed to be minimal, i.e., strictsupersets of hyperedges are not included in E , and therefore,the hypergraph representation is not redundant. For example,for the hypergraph in Fig. 1, {1, 2, 3, 4} is also an invalidtransmission schedule, but is not a hyperedge, since it alreadyincludes two hyperedges {1, 2} and {1, 3, 4} as subsets.Finally, note that the links in each hyperedge e are chosenlocally, in the sense that there is a link i ∈ e such that all theother links in e are in Li, as described in (3).
In each time slot, the scheduling algorithm has to choose a setσ of independent links for transmission, where the term “inde-pendent” implies that no subset of σ can form a hyperedge. Foreach link i in the hypergraph, define Ni = {k ∈ V : {i, k} ⊆e for some e ∈ E} as the set of neighbors of link i. Thus, wecan define the interference degree Δi for a link i as follows. Wefirst associate each neighboring link j ∈ Ni with weight Δij
as follows:
Δij = maxe∈E,{i,j}⊆e
1|e| − 1
(5)
Fig. 3. Generalized star-shaped hypergraph with five links. Thereare a total of six hyperedges in the figure: E = {{1, 2, 3}, {1, 3, 4},{1, 4, 5}, {1, 2, 5}, {1, 2, 4}, {1, 3, 5}}. Only two hyperedges {1, 2, 3} and{1, 2, 4} are shown.
where the hyperedge e has to include both links i and j (Δij =0 if i and j are not neighbors). Now, define the interferencedegree of link i as follows:
Δi = max
⎧⎨⎩ max
σ⊆Ni,σ∈M
∑j∈σ
Δij , 1
⎫⎬⎭ (6)
where maxσ⊆Ni,σ∈M∑
j∈σ Δij is the weight of the max-weight independent set formed by links in Ni, and Mis the family of all independent sets. Intuitively, the termmaxσ⊆Ni,σ∈M
∑j∈σ Δij gives an estimate of the maximum
number of “active hyperedges” with respect to link i, wherea hyperedge e = {i, i1, i2, . . . , ik−1} is “active” with respectto link i if all links in e except link i are scheduled. Inthe graph case, this is equivalent to the maximum number of“active edges” or simply the maximum number of concurrenttransmissions in a link i’s neighborhood [15] since Δij = 1for all j ∈ Ni. For general hypergraphs, we have Δij < 1due to the fundamental property of cumulative interference.Finally, define Δ = maxi∈V Δi as the interference degree of thehypergraph H. It will be shown later that 1/Δ is a lower boundon the scheduling efficiency of maximal scheduling algorithmswith the hypergraph model, which will be defined later in thissection.
Example: Consider the hypergraph H = (V, E) in Fig. 3with five links, where V = {1, 2, 3, 4, 5} is the link set, and E ={{1, 2, 3}, {1, 3, 4}, {1, 4, 5}, {1, 2, 5}, {1, 2, 4}, {1, 3, 5}} isthe set of six hyperedges (in the figure, only two hyperedges areshown). We have N1 = {2, 3, 4, 5}, and Δ12 = Δ13 = Δ14 =Δ15 = 1/2, since all the hyperedges have cardinality 3. Thus,Δ1 = 2, since {2, 3, 4, 5} is the max-weight independentset in N1 with total weight 2. Similarly, we have Δ2 = 3/2,because {3, 4, 5} is the max-weight independent set in N2 withweight 3/2. By symmetry, we have Δ2 = Δ3 = Δ4 = 3/2,and therefore, the interference degree for the hypergraph isΔ = 2. We will prove in Section III that maximal schedulingcan achieve at least 1/2 of the optimal stability region.
B. Queueing Model
We assume that time is slotted. For each link i ∈ V , weassociate an external packet arrival process Ai(n), which isthe total number of arrived packets during the first n time
http://ieeexploreprojects.blogspot.com

LI AND NEGI: MAXIMAL SCHEDULING IN WIRELESS NETWORKS WITH HYPERGRAPH INTERFERENCE MODELS 301
slots. The assumptions on the packet arrival processes areas follows.
1) The maximum number of arrived packets in each timeslot is uniformly bounded by a constant, i.e., withprobability 1 (w.p.1), we have
Ai(n) − Ai(n − 1) ≤ Amax ∀i ∈ V, n ≥ 1 (7)
where Amax is a positive constant.2) The strong law of large numbers (SLLN) applies, i.e.,
w.p.1, we have
limn→∞
Ai(n)/n = ai ∀i ∈ V (8)
where ai is defined as the arrival rate of link i.
Note that our assumptions on the packet arrival processes arequite mild since they can be correlated over multiple time slotsas well as across different links. Now, the queueing dynamicsof the wireless network can be described as follows:
Qi(n) = Qi(n − 1) − σi(n) + Ai(n) − Ai(n − 1) (9)
where Qi(n) represents the queue length of link i at the endof time slot n, and σi(n) is the indicator function of whetherlink i is scheduled at time slot n, i.e., σi(n) = 1 if link iis scheduled at time slot n, otherwise σi(n) = 0. Note thatσi(n) ≤ Qi(n − 1) since the queues cannot be negative. Withan abuse of notation, we also refer to the vector σ as anindependent set.
We are interested in the throughput performance of a sched-uler π, which is represented by its stability region Aπ = {a ∈R
N+ : a is stable under π}. This implies that any arrival process
satisfying (7) and (8) with an average arrival rate a ∈ Aπ isstable under the scheduler π. The stability in this paper isdefined as the rate stability [41]
limn→∞
1n
n∑k=1
σi(k) = ai, w.p.1 ∀i ∈ V. (10)
Thus, if the network is rate stable, we can guarantee an averagethroughput of ai for each link i. It has been shown [10] thatthe optimal stability region is A� = Co(M), where Co(·)denotes convex hull. For a suboptimal scheduling algorithmπ, one is usually interested in its scheduling efficiency [18]γ = sup{κ : κA� ⊆ Aπ}, which is the largest fraction of A�
that can be stabilized by the algorithm π. Maximal schedulersare of particular interests. It has been shown [15] that withthe graph interference model, any maximal scheduler π canachieve at least a scheduling efficiency of 1/Δ, where Δ is theinterference degree of the underlying graph. In this paper, weare interested in the hypergraph interference model. In the nextsection, we will analyze the stability region maximal schedulingalgorithms with the hypergraph model and prove that it achievesa similar scheduling efficiency with a generalized definition ofinterference degree.
III. MAXIMAL SCHEDULING WITH
HYPERGRAPH MODELS
The popularity of maximal scheduling, to a large extent, isattributable to its simple specification, which allows distributed(random) algorithms with low overhead [15], [18]. Similar tothe graph case, the maximal scheduling algorithm with thehypergraph model is also quite simple. A conceptual maximalscheduler can work as follows. In each time slot, the schedulerconsiders the set of backlogged links in an arbitrary order.When a link is considered, it is put onto the schedule if nohyperedge constraint is violated. Thus, compared with thescheduling algorithm with the graph interference model [15],the only change is that, instead of the edge constraints, onenow needs to check hyperedge constraints, which correspondsto sum interference. Consequently, similar to the graph model,maximal scheduling with locally constructed hypergraphs canbe implemented in a distributed fashion with low computationalcomplexity. Note that this is in contrast with the global SINRmodel, where the addition of any link to the schedule has torequire coordinations of all the scheduled links, which canarbitrarily be located in the network.
A. Stability Region
We next consider the stability region of maximal schedul-ing. In the following theorem, we provide a lower bound onthe stability region of any maximal scheduler. Let the setW consists of all N × N matrices that satisfy the followingproperties.
1) W is symmetric, and 0 ≤ Wij ≤ 1 for all i and j.2) Wii = 0 for all i, and Wij = 0 if j ∈ Ni.3) For any hyperedge e that includes link i,
∑j∈e Wij ≥ 1.
We have the following theorem.Theorem 1: Let a maximal scheduler π with a hypergraph
H be given. Then, the network is stable for an arrival rate a ifthere is a matrix W ∈ W such that (I + W )a � 1, where I isthe identity matrix, and 1 = (1, 1, . . . , 1)T .
Note that if the hypergraph H is indeed a graph, the ma-trix W is the graph incidence matrix: Wii = 0, Wij = 1 ifj ∈ Ni, otherwise Wij = 0. Therefore, the stability region of(I + W )a � 1 reduces to that proved in [15]. Thus, the lowerbound region in Theorem 1 is a generalization of the lowerbound for the graph model to the hypergraph models.
Proof: The analysis of stability regions associated withgeneral arrival processes is quite hard since to show that anarrival rate a is stable, one has to guarantee stability for allstochastic arrival processes with the same rate a. In this paper,the analysis is done in the framework of fluid limits [15], [41],which are introduced in Appendix A. Appendix B proves thetheorem using fluid limits. �
Thus, Theorem 1 proposes a more general form of lowerbound on the stability region under maximal scheduling. Thiscan be used as a sufficient condition to check the feasibility of agiven arrival rate a. We next analyze the scheduling efficiencyof maximal scheduling with the hypergraph model.
http://ieeexploreprojects.blogspot.com

302 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 61, NO. 1, JANUARY 2012
B. Scheduling Efficiency
Based on the foregoing analysis on the stability region, wenext show that maximal scheduling with hypergraph interfer-ence models can achieve a scheduling efficiency of at least 1/Δ.
Theorem 2: Suppose a wireless network with hypergraphinterference model H is given. Consider an arbitrary arrivalprocess satisfying (7) and (8) with arrival rate a ∈ A�. Then,a/Δ ∈ Aπ is stable for any maximal scheduler π.
We first present the outline of the proof. For a backloggedlink i, in each time slot, maximal scheduling implies thateither link i transmits, or there is an “active” hyperedge{i, i1, . . . , ik−1} with respect to i (the definition of activehyperedge is in Section II-A). In both cases, it can be shown that
σi(n) +∑j∈Ni
Δijσj(n) ≤ Δi ≤ Δ (11)
according to the definition of {Δij}. Thus, for any feasiblearrival rate a ∈ A�, we have
ai +∑j∈Ni
Δijaj ≤ Δ. (12)
Further, we will prove that the set of weights {Δij} ∈ W ,along with (12), imply that a/Δ is in the lower bound regiondefined in Theorem 1.
Proof: See Appendix C. �We next discuss the tightness of the preceding bound on the
scheduling efficiency. Note that if Δ = 1, it is obvious that thescheduling efficiency is tight. We now assume that Δ > 1 andshow a tightness result in the following theorem.
Theorem 3: Let a hypergraph H be given such thatany link i ∈ V with Δi = Δ > 1 satisfies the followingcondition. The set of independent links in Ni, whichachieve an integer interference degree Δ, can be written as{e1/{i}, e2/{i}, . . . , eΔ/{i}}, where the hyperedges {ek} aredisjoint except a common link i. Then, for any ε > 0, there is afeasible arrival rate a ∈ A� and an arrival process with rate a′,which is arbitrarily close to a in the sense that
a′j ≤ (1/Δ)aj + ε ∀j ∈ V. (13)
Further, there is a maximal scheduler π such that the network isunstable under π with this arrival process.
Essentially, the theorem assumes that the hypergraph Hincludes a generalized “star” shaped hypergraph, where theindependent set is a set of disjoint hyperedges (excluding linki). An example is the hypergraph in Fig. 3, where Δ1 = Δ = 2,which is achieved by two disjoint hyperedges (excluding theintersection at link 1), i.e., {{2, 3}, {4, 5}}.
Proof: See Appendix D. �Thus, the scheduling efficiency 1/Δ is a tight lower bound
on the performance of maximal scheduling algorithms withhypergraph models. According to (6), Δ can be interpretedas the estimation of the number of active hyperedges in alink’s neighborhood. Similar to the graph case, the performanceof maximal scheduling under different physical layer specifi-cations can be analyzed using geometry and graph theoretictechniques [15], [23]. Whereas the exact analysis is out of the
scope of this paper, we note that for hypergraphs constructedlocally, 1/Δ can be bounded by a constant, since the numberof transmitting nodes in a fixed area should be bounded, dueto sum interference constraint in (4). This is fundamentally dif-ferent from the graph model, where the binary interference as-sumption may result in an infinite number of transmitting linksin a network, even if the network is restricted in a fixed area.An illustrating example is the star shaped network in Fig. 2(a),where it has been proved in [15] that, in the worst case, maximalscheduling cannot guarantee any positive fraction of the optimalstability region since one can arrange, under the “unidirectionalequal power” model, an arbitrarily large number of independenttransmitting links along the dashed circle, in which case, thescheduling efficiency 1/Δ can arbitrarily be small. On theother hand, under hypergraph interference models, the numberof transmitting links in this network can be effectively upperbounded due to the sum interference constraint in (4). Thus,the performance analysis of maximal scheduling in hypergraphmodels is more accurate than the graph model due to the consid-eration of sum interference. In the next section, we explore thetradeoff between interference approximation accuracy and usernode coordination complexity during scheduling by analyzingthe outage performance of the hypergraph model in randominfinite networks.
IV. OUTAGE PERFORMANCE OF THE
HYPERGRAPH MODEL
While the hypergraph model is more complex than a graphmodel, it allows more accurate modeling (and thus control) ofinterference. In this section, we demonstrate the modeling accu-racy of the locally constructed hypergraph model by analyzingits outage probability in random infinite networks, where thenodes form a homogeneous PPP [37]. We first describe therandom network model.
A. Random Network Model
We consider the well-known Poisson random network model[39], where the set of contending nodes form a homogeneousPPP on an infinite 2-D plane. This model is widely used in theliterature of wireless network analysis since it is tractable, al-lowing valuable insights into the behavior of large networks. BySlivnyak’s theorem [37], we assume, without loss of generality,that there is a receiver placed at the origin. We further assumethat all transmitting nodes transmit with equal power ρ, as iscommon in 802.11 networks (power adaptation is a challengingquestion, which is outside the scope of this paper). In thissection, to obtain some insights into the impact of hyperedgesizes on the outage performance in large (infinite) wirelessnetworks, we assume that the channel is subject to Rayleighfading. Note that for many wireless systems, multipath fadingcan often be effectively handled by diversity techniques. Here,the assumption of Rayleigh fading is largely due to its tractabil-ity in allowing insightful closed-form solutions in the outageperformance analysis [39]. Under the Rayleigh fading model,the received signal power at the center receiver can be expressedas S0 = ρh0d
−α0 , where h0 is the power fading coefficient,
http://ieeexploreprojects.blogspot.com

LI AND NEGI: MAXIMAL SCHEDULING IN WIRELESS NETWORKS WITH HYPERGRAPH INTERFERENCE MODELS 303
which is exponentially distributed with mean 1, d0 is the lengthof the center link, and α is the path loss exponent. We assumethat SINR is an appropriate metric of performance and allow thesystem to be direct-sequence spread spectrum (DSSS) due to itscapability in handling nontrivial levels of multiuser interferencein wireless networks. Thus, a packet is received successfully atthe center receiver if
ρh0d−α0
N0 +∑
j∈σ ρhj‖xj‖−α≥ θ
M(14)
where N0 is the received noise power over the entire bandwidth,σ is the set of transmitting links, xj is the location of thetransmitter of a transmitting link j, and M is the spreadingfactor of DSSS (M = 1 in nonspread spectrum systems).
Due to the interference constraint, the set of actual scheduledtransmitters in σ is a subset of the contending node set. Infact, the distribution of transmitting nodes is quite compli-cated, which depends on various factors, such as interferencemodel, stochastic packet arrival processes, channel fading, andscheduling algorithms. In this paper, to make the analysistractable, we apply an approximation by assuming that the setof transmitting nodes is also a PPP with a smaller density λ,which is obtained by proper “thinning” of the original PPP.Note that, strictly speaking, the set of transmitting nodes shouldbe separated by a certain distance, in which case, a hardcorepoint process [37] is more suitable. However, it has beenobserved that the PPP model can still achieve very accurateapproximation [39] on the distribution of the interference,particularly when the guard zone sizes are relatively small. Thishas also been verified by simulation results in the case of graphinterference models (see details in [20]). We next analyze theoutage performance under the approximate PPP model.
B. Outage Analysis
To explore the interference modeling limit of the hypergraphmodel, we assume that the transmission density λ under thehypergraph model is as follows. A hypergraph with maximumhyperedge size K can always guarantee that the following ap-proximate “local” outage probability P l
out at the center receiveris bounded by
P lout = P
(ρh0d
−α0
N0 +∑K−1
i=1 ρh[i]
∥∥x[i]
∥∥−α <θ
M
)≤ ε (15)
where ε is a positive constant, x[i] is the location of the ith near-est transmitting node, and h[i] is its corresponding power fadingcoefficient. This is because the hypergraph model approximatesthe total interference by the sum interference from the nearestK − 1 transmitters. Further, note that such an outage bound caneasily be achieved by a hypergraph with maximum hyperedgesize K, since if (15) fails to hold for a particular transmittingset consisting of K links, one can simply form a hyperedgeto exclude such a transmission scenario. Finally, note thatby choosing an appropriate outage bound ε, the transmissiondensity λ can be controlled.
Since the approximated “local” outage probability P lout only
considers a subset of interfering links, we are interested in
TABLE IPARAMETERS FOR NUMERICAL CALCULATIONS
its approximation accuracy with respect to the true outageprobability at the center receiver, which is defined as
Pout = P
(ρh0d
−α0
N0 +∑∞
i=1 ρh[i]
∥∥x[i]
∥∥−α <θ
M
). (16)
The key result of this section is the following theorem, whichgives closed-form solutions to the outage probabilities P l
out andPout.
Theorem 4: The outage probabilities P lout and Pout can be
expressed as follows:
P lout = 1 − exp
(− θ
Mη
) ∞∫0
2(λπx2)K
xΓ(K)Ψ(x)e−λπx2
dx (17)
Pout = 1 − exp
(− θ
Mη− λπd2
0
(θ
M
) 2α 2π/α
sin(2π/α)
)(18)
where η = ρd−α0 /N0 is the signal-to-noise ratio (SNR) at
the center receiver, and Ψ(x) = (∫ x
0 (2Mrα+1/x2(Mrα +dα0 θ))dr)K−1.
Proof: See Appendix E. �Having obtained the analytical results, we will illustrate the
interference approximation accuracy of the hypergraph modelby comparing the foregoing two outage probabilities usingnumerical calculations in the next section.
V. NUMERICAL RESULTS
In this section, we demonstrate the numerical results on theperformance of the hypergraph model in wireless networks.We first consider the random infinite network described inSection IV and explore the interference approximation accuracyof the hypergraph model by numerical calculations.
A. Infinite Random Networks
We next calculate the two outage probabilities in Theorem 4.By choosing parameters as in Table I, we plot the numericalresults in Fig. 4, where the outage probabilities are shown inboth cases, as functions of the transmission density λ, accordingto (17) and (18), under different path loss exponents. In the fig-ure, “K-Hypergraph” refers to the hypergraph whose maximumhyperedge size is K. Note that since the hypergraph modelalways underestimates the interference, we have P l
out ≤ Pout
for all transmission densities.Remarks:
1) Approximation accuracy: Compared with the graphmodel, the hypergraph model always approximates thetrue outage probability with better accuracy. For example,when λ = 10−3 and α = 3, the true outage probability is
http://ieeexploreprojects.blogspot.com

304 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 61, NO. 1, JANUARY 2012
Fig. 4. Numerical results of outage calculations for the infinite 2-D random wireless networks with Rayleigh fading. (a) Case with the path loss exponent α = 3and (b) the case with α = 4.
around 0.22. However, the outage probability approxima-tion by the graph model is only around 0.15. Therefore,roughly speaking, around 30% of the outage events areignored by the graph due to its binary interference nature.In this case, 4-Hypergraph has a better approximation ofaround 0.19. Thus, by considering the sum interference,the hypergraph model can effectively capture more out-age events and therefore reduces the outage probability.
2) Accuracy versus complexity: The approximation accu-racy of the hypergraph has a “diminishing returns” prop-erty, which can be seen by observing the fact that theoutage approximation error improvement decreases asthe maximum hyperedge size K increases. On the otherhand, the construction complexity of the hypergraph ex-ponentially increases in K. Thus, one can tradeoff someapproximation accuracy by only considering properlysmall hyperedge sizes so that the sum interference isapproximated with low complexity.
3) Effect of path loss exponent α: The modeling accuracyof both graph and hypergraph models improves when thepass loss exponent gets larger. In particular, when α = 4and Pout = 0.3, all hypergraphs can capture above 95%outage events, and the graph can model around 80%outage events, as can be seen by computing the ratioP l
out/Pout. On the other hand, for the case α = 3 andPout = 0.3, the ratio is only about 85% for hypergraphsand about 70% for the graph. Such improvement withlarger values of α is because, when α grows larger,the contributions of the far-away interferers are muchsmaller as compared with the nearby interferers, andtherefore, the local interference approximation becomesmore accurate.
B. Finite Random Network
We next consider the performance of hypergraph model in afinite random network, where the topology is shown in Fig. 5.In the figure, 40 links are uniformly distributed over a 2-Dplane. The square nodes are transmitters, and the round nodes
Fig. 5. Topology of the random network with 40 links used for simulation.The square nodes are transmitters, and the round nodes are receivers.
are receivers. We assume that the link lengths are equal. Wefurther assume that the effect of fading is properly handledusing diversity techniques, such that all random coefficients{hi} in (14) take the constant value 1. The SNR at the receiversare the same for all links. The parameters used in the simulationare shown in Table I.
The hypergraph is generated according to the description inSection I-C, with the modification that (4) is replaced with
Si
Ni +∑k−1
s=1 Iisi
<θ
M(19)
due to the DSSS physical layer. Further, we assume that nosuperset of a hyperedge is a hyperedge, and therefore, thehypergraph specification is not redundant.
In the simulation, we assume that the packet arrival processesare independent identically distributed with Bernoulli distribu-tion and a uniform arrival rate. We simulate both hypergraph(which includes graph) and the global SINR-based schedulingalgorithms. We consider random maximal scheduling for thehypergraph case, which adds the links to the schedule accordingto a randomly generated order in each time slot, such that abacklogged link is scheduled if there is no hyperedge constraintviolation when it is being considered. We also consider the
http://ieeexploreprojects.blogspot.com

LI AND NEGI: MAXIMAL SCHEDULING IN WIRELESS NETWORKS WITH HYPERGRAPH INTERFERENCE MODELS 305
Fig. 6. Simulation results of the maximum total queue lengths in the 40-link random wireless network, with the path loss exponent α and the threshold β valuesshown in each figure.
random maximal scheduling under the global SINR, whichwe denote as SINR-MS. As an upper bound, we simulate theperformance of SINR-based LQF scheduling (SINR-LQF) in[31], which adds the links according to the queue lengths order,subject to the physical SINR constraint (14). Finally, the packetreception at a transmitting link i is assumed to fail if the trueSINR constraint (14) is violated.
1) Throughput: The total queue lengths under different ar-rival rates are shown in Fig. 6. The results are averaged over30 independent simulations, where each simulation consistsof 104 time slots. One can detect the boundary of the stabil-ity region (the maximum uniform throughput) by identifyingthe point at which the total queue length begins to increasesharply. For example, in the case of α = 3 and β = 4 dB, thegraph model achieves a maximum uniform rate of 0.22, thehypergraph models achieve about 0.24, the SINR-MS achievesaround 0.26, and the SINR-LQF has the largest rate, whichis around 0.30. In the case of random maximal scheduling,the SINR-based scheduling algorithms achieve around 10%throughput gain over hypergraph-based algorithms when α = 3and β = 4 dB. The gain is around 5% when α = 4 and β =4 dB. Such throughput gain is mainly because of the perfectaccuracy of the SINR model, which results in zero packetcollision. On the other hand, this is achieved at the expense of
network-wide user node coordination due to the global nature ofthe SINR model. In this sense, the hypergraph-based schedulersare more attractive due to the localized user coordination duringscheduling. The better throughput performance of SINR-LQFover SINR-MS is also expected since the queue lengths orderinformation is used in the former case, which requires higherscheduling complexity.
In all cases, the hypergraph-based scheduling algorithmsachieve larger throughput than graph-based scheduling. Notethat due to the construction procedure in (19), the set ofhyperedges is always a superset of the set of edges, andtherefore, it may seem like the hypergraph “should” achieve asmaller capacity than the graph due to the more restricted rules.However, since the graph model is a binary approximation, theactual throughput is reduced by the packet collisions caused byits “aggressive” transmissions. Thus, although the hypergraphmodels are relatively “conservative” since they place more con-straints according to the sum interference, overall they can stillachieve a better throughput, as compared with the graph model.
Finally, by comparing the throughput results under differentβ, one can easily observe the “accuracy versus complexity”tradeoff for hypergraph models. In the simulation results,the throughput performance for hypergraph schedulers im-proves with larger β due to the more accurate interference
http://ieeexploreprojects.blogspot.com

306 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 61, NO. 1, JANUARY 2012
Fig. 7. Simulation results of average outage probability in the 40-link random wireless network, with the path loss exponent α and the threshold β values shownin each figure.
approximation by adding more links in Li so that the numberof packet collisions is reduced. Note that the throughput gainalso depends on α, where a larger α implies a more accurate in-terference approximation for the same β since the contributionfrom far-away links gets smaller.
2) Outage Probability: The simulation results of averageoutage probabilities are shown in Fig. 7 with different arrivalrates under different path loss exponents α and threshold βvalues. Note that the results of both SINR-based scheduling arenot shown in the figure, as they both have zero outage.
Remarks:1) Outage probability: The hypergraph model achieves a
significant outage probability reduction as compared withthe graph model. For example, when α = 3 and β =4 dB, the average outage probability for 3-Hypergraphis around 0.02 under arrival rate 0.2. On the other hand,under the graph model, it is around 0.05. Thus, by mod-eling the sum interference, the hypergraph model canreduce the packet collisions very effectively. Note thatthe outage probability curves have slower slopes whenthe arrival rates are large. This corresponds to the casewhen the network is unstable. In such a case, the numberof packet transmissions is less sensitive to the increase inarrival rates.
2) Outage capacity: If we consider the outage capacity, i.e.,the maximum achievable rate under a certain outage prob-ability constraint, the hypergraph interference models canhave a much larger gain as compared with the graphmodel. For example, under the outage probability con-straint of 0.02 when α = 3 and β = 4 dB, 4-Hypergraphcan support a maximum rate of around 0.2, whereasthe graph model can only achieve about 0.15. Thus, byconsidering the sum interference, the hypergraph modelachieves around 30% increase in the outage capacity ascompared with the graph model.
3) Accuracy versus complexity: The outage probabilitiesof hypergraph models decrease when the threshold βincreases due to the improved approximation accuracyby considering more links in a link’s neighborhood. Forexample, when α = 3 and β = 0 dB, all hypergraphmodels have an outage probability of 0.03 under arrivalrate 0.2, as compared with around 0.02 when β = 4 dB.On the other hand, the threshold β has no effect onthe graph model due to the binary interference nature.Further, note that when β is small, all hypergraph mod-els achieve very similar outage probability results, inwhich case, 3-Hypergraph is more attractive due to itslower coordination complexity. In general, increasing the
http://ieeexploreprojects.blogspot.com

LI AND NEGI: MAXIMAL SCHEDULING IN WIRELESS NETWORKS WITH HYPERGRAPH INTERFERENCE MODELS 307
threshold β can effectively reduce the outage probabilityby considering the interference from farther transmittinglinks but at the expense of more coordination overheadsamong links. Finally, the reduction in outage proba-bility decreases as the hypergraph sizes increase. This“diminishing marginal returns” property again confirmsour observation that in wireless networks, the majorityof interference is from a few nearby transmitting links.Therefore, a hypergraph with a small hyperedge size (e.g.,4-Hypergraph) can model the interference with goodaccuracy.
4) Effect of path loss exponent: When the path loss exponentα gets larger, both graph and hypergraph models havesmaller outage probabilities. Further, the gap betweenthese two models is also smaller. This is the same conclu-sion as the numerical results for infinite random networksin Section V-A. The intuition is that the interferencesignals get more attenuation as α gets larger and there-fore is more likely to be dominated by a few nearbytransmitting links since the faraway transmissions areattenuated more severely than the nearby transmissions.Thus, the accuracy of both graph and hypergraph modelsbecome better, and the difference between the two is alsosmaller.
VI. CONCLUSION
We have proposed a hypergraph interference model for thescheduling problem in wireless networks. The proposed hyper-graph is quite flexible in modeling sum interference constraints,which can include both the graph model and the physicalSINR model as special cases. We investigated the performanceof the scheduling algorithms with the hypergraph model andproposed a lower bound on the stability region for any maximalscheduler. We further proposed a lower bound on its schedulingefficiency, which depends on a certain definition of the interfer-ence degree of the underlying hypergraph. Finally, we analyzedthe outage probability of the hypergraph model in randomnetworks and showed that hypergraphs with small hyperedgesizes can model the interference quite accurately.
APPENDIX AFLUID LIMITS
We briefly introduce the framework of fluid limits, which isused to prove the rate stability. For details, see [41] and thereferences therein.
Definition of Fluid Limits: We first rewrite the queueingequation in (9) as follows:
Qi(n) = Qi(0) − Di(n) + Ai(n) (20)
where Di(n) =∑n
k=1 σi(k) is the cumulative packet depar-tures from link i during the past n time slots. Given the networkdynamics (Q(n),A(n),D(n))∞t=0, we first extend the supportfrom N to R+ using linear interpolation. For a fixed sample pathω, define the following fluid scaling:
fr(t, ω) = f(rt, ω)/r (21)
where the function f(·) can be Qi(·), Ai(·), or Di(·). It can beverified that these functions are uniformly Lipschitz continu-ous, i.e., for any t > 0 and δ > 0, we have
|fr(t + δ) − fr(t)| ≤ Kδ (22)
where the positive constant K is Amax for functions Ai(·)and Qi(·) and 1 for function Di(·). Thus, these functions areequi-continuous. According to the Arzéla–Ascoli theorem [40],any sequence of functions {frn(t)}∞n=1 contains a subsequence{frnk (t)}∞k=1 such that w.p.1
limk→∞
supτ∈[0,t]
∣∣frnk (τ) − f(τ)∣∣ = 0 (23)
where f(t) is a uniformly continuous function (and thereforedifferentiable almost everywhere [40]). Define any such limit(Q(t), A(t), D(t)) as a fluid limit.
Properties of Fluid Limits: The following properties hold forany fluid limit:
Ai(t) = ait (24)
d
dtQ(t) = 0, if Q(t) = 0 (25)
where (24) occurs because of the (functional) SLLN, and (25)is because any regular point t with Q(t) = 0 achieves theminimum value (since Q(t) ≥ 0) and, therefore, has zero deriv-ative. We further have the following lemma, which provides asufficient condition about rate stability (see the proof in [41]).
Lemma 1: The network is rate stable if any fluid limit withQ(0) = 0 has Q(t) = 0 ∀t ≥ 0.
APPENDIX BPROOF OF THEOREM 1
Proof: Consider the following Lyapunov function:
L(t) =12
∑i∈V
Qi(t)
⎛⎝Qi(t) +
∑j∈Ni
WijQj(t)
⎞⎠ . (26)
Now, assuming that Q(0) = 0, we have that L(0) = 0. Further,its derivative is
L(t)=∑i∈V
Qi(t) ˙Qi(t) +12
∑i∈V
∑j∈Ni
(Wij + Wji)Qi(t) ˙Qj(t)
(a)=
∑i∈V
Qi(t)
⎛⎝ ˙Qi(t) +
∑j∈Ni
Wij˙Qj(t)
⎞⎠
(b)=
∑i∈V
Qi(t)
⎛⎝ai+
∑j∈Ni
Wijaj−
⎛⎝ ˙Di(t)+
∑j∈Ni
Wij˙Dj(t)
⎞⎠⎞⎠
where (a) is because the matrix W is symmetric, and (b) isbecause of SLLN in (24). Note that if Qi(t) = 0 for all i ∈ Vand t ≥ 0, from (27), we conclude that L(t) = 0 for all t ≥ 0,and therefore, L(t) = 0, and Q(t) = 0 for all t ≥ 0, from which
http://ieeexploreprojects.blogspot.com

308 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 61, NO. 1, JANUARY 2012
the proposition holds following Lemma 1. Now, assuming thatthere exists link i and t0 ≥ 0 such that Qi(t0) > 0, we nowshow that
ai +∑j∈Ni
Wijaj −
⎛⎝ ˙Di(t0) +
∑j∈Ni
Wij˙Dj(t0)
⎞⎠ ≤ 0 (27)
from which one can still conclude that L(t) ≤ 0, followingwhich the theorem holds.
Now, consider any converging subsequence {rnk}∞k=1, which
is associated with the fluid limit (Q(t), A(t), D(t)). SinceQi(t0) > 0, there is δ > 0 such that Qi(t0) > δ > 0. Further,since the function Qi(t) is uniformly continuous, there existsτ > 0 such that Qi(t0) > δ/2 for all t ∈ (t0 − τ, t0 + τ). Thus,for sufficiently large k, the convergence in (23) implies thatQ
rnki (t) > δ/4 for all t ∈ (t0 − τ, t0 + τ), i.e.,
Qi(t) > rnkδ/4 ≥ 1 ∀t ∈ (rnk
(t0−τ), rnk(t0+τ)) . (28)
Thus, for sufficiently large k, link i always has a nonemptyqueue during time slots (rnk
(t0 − τ), rnk(t0 + τ)). Finally,
according to maximal scheduling, in each time slot, either linki transmits, or there is an active hyperedge e with respect to linki. In both cases, we have
σi(t)+∑j∈Ni
Wijσj(t) ≥ 1 ∀t ∈ (rnk(t0 − τ), rnk
(t0 + τ))
which is due to the fact that the matrix W satisfies∑
j∈e Wij ≥1 for any hyperedge e. Summing up the departures, we have(D
rnki (t0 + τ) − D
rnki (t0 − τ)
)+
∑j∈Ni
Wij
(D
rnkj (t0 + τ) − D
rnkj (t0 − τ)
)≥ 2τ.
From which we conclude that, since τ can be arbitrarily small,in the fluid limit, we have
˙Di(t) +∑j∈Ni
Wij˙Dj(t) ≥ 1 (29)
and therefore, (27) holds due to (I + W )a � 1. �
APPENDIX CPROOF OF THEOREM 2
To prove the theorem, we first need to prove two lemmas. Westart with Lemma 2.
Lemma 2: An arrival rate a is stable under any maximalscheduler π if
ai +∑j∈Ni
Δijaj ≤ 1 ∀i ∈ V. (30)
Proof: Note that for the set of weights {Δij} defined in(5), we have Δij ≥ 0, Δii = 0, and Δij = Δji for all i, j ∈ V .
Further, for any hyperedge e, we have∑j∈e
Δij ≥∑
j∈e,j =i
1|e| − 1
= 1 (31)
due to the definition in (5). Thus, we conclude that the matrix{Δij} belongs to W , and therefore, the lemma holds accordingto Theorem 1. �
We next prove the following lemma, which proposes anupper bound on the weighted departure in the neighborhood{i} ∪ Ni for any link i.
Lemma 3: For any feasible arrival rate a ∈ A�, we have
ai +∑j∈Ni
Δijaj ≤ Δi ≤ Δ ∀i ∈ V. (32)
Proof: Let a link i ∈ V be given. Since a ∈ A�, we assumethat there is a scheduler π such that a ∈ Aπ . For any suchscheduler π, consider the following “Lyapunov” function:
Vi(n) = Qi(n) +∑j∈Ni
ΔijQj(n) (33)
= Qi(0) + Ai(n) − Di(n) (34)
+∑j∈Ni
Δij (Qj(0) + Aj(n) − Dj(n)) (35)
where Di(n) =∑n
k=1 σi(k) is the cumulative departures dur-ing the first n time slots. Since the network is rate stable underthe scheduler π, we have
limn→∞
Vi(n)/n = 0, w.p.1 (36)
which implies that w.p.1
lim infn→∞
Ai(n) +∑
j∈NiΔijAj(n)
n
≤ lim supn→∞
Di(n) +∑
j∈NiΔijDj(n)
n
(a)
≤ Δi ≤ Δ
where (a) is because of the upper bound on the total departuresin each time slot in (11). Therefore, the lemma follows fromthe SLLN in (8) and the fact that the scheduler π is chosenarbitrarily. �
Proof of Theorem 2: We can now prove Theorem 2. From theresult in Lemma 3, we conclude that if a ∈ A�, then (1/Δ)amust satisfy (30), and therefore, according to Lemma 2, isstable under any maximal scheduler π. �
APPENDIX DPROOF OF THEOREM 3
Proof: Consider the following arrival rate vector a: aj =1if and only if j ∈ {e1, e2, . . . , eΔ}/{i}; otherwise, aj =0.It is easily seen that a ∈ A� since the set of links{e1, e2, . . . , eΔ}/{i} is an independent set. Now consider thearrival rate a′ such that a′
j = aj/Δ if j = i, and a′i = ε. Thus,
we have a′j − (1/Δ)aj = ε for all j ∈ V . We next show that
there exists an arrival process with such rate a′, which makes
http://ieeexploreprojects.blogspot.com

LI AND NEGI: MAXIMAL SCHEDULING IN WIRELESS NETWORKS WITH HYPERGRAPH INTERFERENCE MODELS 309
the network unstable under a maximal scheduler π that assignslink i the lowest priority. That is, link i is always considered lastby the scheduler π during scheduling. The arrival process is asfollows. In each kth time slots out of every Δ time slots, there isa packet arriving at each link in the set of links ek/{i}. Then, itis immediately transmitted in the next time slot, because theselinks have higher priority than link i and form an independentset. Further, it is easily seen that there is no departure from linki, since in each time slot, the transmitting links form an “active”hyperedge with respect to link i. As far as link i is concerned,we assume that in each time slot, there is a packet arrivingat link i with probability ε so that a′
i = ε. Thus, since link inever gets a chance to transmit, it is starved, and the network isunstable. �
APPENDIX EPROOF OF THEOREM 4
To prove the theorem, we first need to prove two lemmas.Define the “local” interference contributed by the nearest K−1transmitting nodes Iloc(K − 1) as follows:
Iloc(K − 1) =K−1∑i=1
ρh[i]l(∥∥x[i]
∥∥). (37)
We have the following lemma describing the distribution ofIloc(K − 1).
Lemma 4: The moment generating function (MGF) ofIloc(K − 1) can be expressed as follows:
ΦIloc(K−1)(s) =
∞∫0
2(λπx2)K
xΓ(K)Ψ(x)e−λπx2
dx (38)
where Γ(K) is the standard Gamma function
Γ(K) =
∞∫0
xK−1e−xdx. (39)
Proof: Denote Rk = ‖x[k]‖ as the short-hand notation forthe distance of the kth nearest transmitting node. The MGF ofIloc(K − 1), conditioned on the event that RK = rK , can beexpressed as follows:
E
(esIloc(K−1)|RK=rK
)=E
(es
∑K−1
i=1ρh[i]l(Ri)|RK =rK
)
(a)=
⎛⎝ rK∫
0
2r
r2K
E(esρhr−α
)dr
⎞⎠
K−1
(b)=
⎛⎝ rK∫
0
2rα+1
r2K(rα − ρs)
dr
⎞⎠
K−1
where step (a) happens because, conditioned on the fact thatthere are K − 1 nodes in the disk centered at the origin withradius rK , these K − 1 nodes are independently and uniformlydistributed inside the disk due to the property of PPP [37].
Step (b) happens because the fading coefficient h is exponen-tially distributed with mean 1. Further, according to [38], thedistribution of RK is as follows:
fRK(x) =
2(λπx2)K
xΓ(K)e−λπx2
(40)
and therefore, the lemma holds after taking the expectation withrespect to fRK
(x). �Similarly, denote the total interference received at the center
receiver as Itot =∑∞
i=1 l(‖x[i]‖). The following lemma de-scribes the distribution of Itot.
Lemma 5: The MGF of the total interference Itot is
ΦItot(s) = exp(−λπ(−sρ)
2α
2π/α
sin(2π/α)
). (41)
Proof: This is a standard result. See, for example, [39]. �Based on the foregoing lemmas, we are now able to prove the
theorem.Proof of Theorem 4: By definition, we calculate the local
outage probability as
P lout = P
(ρh0d
−α0
N0 + Iloc(K − 1)<
θ
M
)
= P
(h0 <
dα0 θ
Mρ(N0 + Iloc(K − 1))
)
(a)= EIloc(K−1)
{P
(h0 <
dα0 θ
Mρ
× (N0+Iloc(K−1)) |Iloc(K−1)
)}
(b)= 1 − EIloc(K−1)
{exp
(−dα
0 θ
MρIloc(K − 1)
)}
× exp(−dαθ
MρN0
)(c)= 1 − ΦIloc(K−1)
(−dα
0 θ
Mρ
)exp
(−dα
0 θ
MρN0
)
where step (a) follows from the law of total probability, step (b)happens because the random variable h0 is exponentially dis-tributed with mean 1, and step (c) follows from the definition ofthe MGF. Thus, the claim holds from noting that η = ρd−α
0 /N0
and applying the result in (38).Now, using a similar argument, the true outage probability
Pout can be expressed as follows:
Pout = P
(ρh0d
−α0
N0 + Itot<
θ
M
)
= P
(h0 <
dα0 θ
Mρ(N0 + Itot)
)
= 1 − EItot
{exp
(−dα
0 θ
MρItot
)}exp
(−dα
0 θ
MρN0
)
= 1 − ΦItot
(−dα
0 θ
Mρ
)exp
(−dα
0 θ
MρN0
)
from which the claim holds after applying (41). �
http://ieeexploreprojects.blogspot.com

310 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 61, NO. 1, JANUARY 2012
REFERENCES
[1] Q. Li, G. Kim, and R. Negi, “Maximal scheduling in a hypergraph modelfor wireless networks,” in Proc. IEEE Int. Conf. Commun., May 2008,pp. 3853–3857.
[2] H. Hartenstein and K. P. Laberteaux, “A tutorial survey on vehicularad hoc networks,” IEEE Commun. Mag., vol. 46, no. 6, pp. 164–171,Jun. 2008.
[3] X. Yang, J. Liu, F. Zhao, and N. Vaidya, “A vehicle-to-vehicle commu-nication protocol for cooperative collision warning,” in Proc. Int. Conf.MobiQuitous, Aug. 2004, pp. 114–123.
[4] J. Zhao, Y. Zhang, and G. Cao, “Data pouring and buffering on the road:A new data dissemination paradigm for vehicular ad hoc networks,” IEEETrans. Veh. Technol., vol. 56, no. 6, pp. 3266–3277, Nov. 2007.
[5] R. Verdone, “Multihop R-ALOHA for intervehicle communications atmillimeter waves,” IEEE Trans. Veh. Technol., vol. 46, no. 4, pp. 992–1005, Nov. 1997.
[6] H. Su and X. Zhang, “Clustering-based multichannel MAC protocols forQoS provisionings over vehicular ad hoc networks,” IEEE Trans. Veh.Technol., vol. 56, no. 6, pp. 3309–3323, Nov. 2007.
[7] J. Tang, G. Xue, C. Chandler, and W. Zhang, “Link scheduling with powercontrol for throughput enhancement in multihop wireless networks,”IEEE Trans. Veh. Technol., vol. 55, no. 3, pp. 733–742, May 2006.
[8] E. Arikan, “Some complexity results about packet radio networks,” IEEETrans. Inf. Theory, vol. IT-30, no. 4, pp. 681–685, Jul. 1984.
[9] F. Baccelli, B. Blaszczyszyn, and P. Muhlethaler, “An Aloha protocol formultihop mobile wireless networks,” IEEE Trans. Inf. Theory, vol. 52,no. 2, pp. 421–436, Feb. 2006.
[10] L. Tassiulas and A. Ephremides, “Stability properties of constrainedqueueing systems and scheduling policies for maximum throughput inmultihop radio networks,” IEEE Trans. Autom. Control, vol. 37, no. 12,pp. 1936–1949, Dec. 1992.
[11] B. Hajek and G. Sasaki, “Link scheduling in polynomial time,” IEEETrans. Inf. Theory, vol. 34, no. 5, pp. 910–917, Sep. 1988.
[12] H. Luo, S. Lu, and V. Bharghavan, “A new model for packet schedulingin multihop wireless networks,” in Proc. ACM Int. Conf. Mobile Comput.Netw., 2000, pp. 76–86.
[13] V. Bharghavan, A. Demers, S. Shenker, and L. Zhang, “MACAW:A media access protocol for wireless LAN’s,” ACM SIGCOMM Comput.Commun. Rev., vol. 24, no. 4, pp. 212–225, Oct. 1994.
[14] P. Gupta and P. R. Kumar, “The capacity of wireless networks,” IEEETrans. Inf. Theory, vol. 46, no. 2, pp. 388–404, Mar. 2000.
[15] P. Chaporkar, K. Kar, X. Luo, and S. Sarkar, “Throughput and fairnessguarantees through maximal scheduling in wireless networks,” IEEETrans. Inf. Theory, vol. 54, no. 2, pp. 572–594, Feb. 2008.
[16] M. Luby, “An efficient randomized algorithm for input-queued switchscheduling,” SIAM J. Comput., vol. 15, no. 4, pp. 1036–1055, Nov. 1986.
[17] A. Eryilmaz and R. Srikant, “Fair resource allocation in wireless networksusing queue-length based scheduling and congestion control,” IEEE/ACMTrans. Netw., vol. 15, no. 6, pp. 1333–1344, Dec. 2007.
[18] X. Wu, R. Srikant, and J. R. Perkins, “Scheduling efficiency of distributedgreedy scheduling algorithms in wireless networks,” IEEE Trans. MobileComput., vol. 6, no. 6, pp. 595–605, Jun. 2007.
[19] S. Sarkar and K. N. Sivarajan, “Hypergraph models for cellular mobilecommunication systems,” IEEE Trans. Veh. Technol., vol. 47, no. 2,pp. 460–471, May 1998.
[20] A. Hasan and J. G. Andrews, “The guard zone in wireless ad hoc net-works,” IEEE Trans. Wireless Commun., vol. 6, no. 3, pp. 897–906,Mar. 2007.
[21] A. Dimakis and J. Walrand, “Sufficient conditions for stability of longestqueue first scheduling: Second order properties using fluid limits,” Adv.Appl. Probab., vol. 38, no. 2, pp. 505–521, Jun. 2006.
[22] C. Joo and N. B. Shroff, “Local greedy approximation for schedulingin multi-hop wireless networks,” IEEE Trans. Mobile Comput., to bepublished.
[23] C. Joo, X. Lin, and N. B. Shroff, “Understanding the capacity region of thegreedy maximal scheduling algorithm in multi-hop wireless networks,”IEEE/ACM Trans. Netw., vol. 17, no. 4, pp. 1132–1145, Aug. 2009.
[24] S. A. Borbash and A. Ephremides, “Wireless link scheduling with powercontrol and SINR constraints,” IEEE Trans. Inf. Theory, vol. 52, no. 11,pp. 5106–5111, Nov. 2006.
[25] S. Kompella, J. E. Wieselthier, A. Ephremides, H. D. Sherali, andG. D. Nguyen, “On optimal SINR-based scheduling in multihop wire-less networks,” IEEE/ACM Trans. Netw., vol. 18, no. 6, pp. 1713–1724,Dec. 2010.
[26] O. Goussevskaia, Y. A Pignolet, and R. Wattenhofer, “Efficiency of wire-less networks: Approximation algorithms for the physical interferencemodel,” Found. Trends Netw., vol. 4, no. 3, pp. 313–420, Mar. 2010.
[27] D. M. Blough, G. Resta, and P. Santi, “Approximation algorithms for wire-less link scheduling with SINR-based interference,” IEEE/ACM Trans.Netw., vol. 18, no. 6, pp. 1701–1712, Dec. 2010.
[28] P. J. Wan, X. Jia, and F. Yao, “Maximum independent set of links underphysical interference model,” in Proc. ACM 4th Int. Conf. Wireless Algo-rithms, Syst., Appl., 2009, pp. 169–178.
[29] P. J. Wan, O. Frieder, X. Jia, F. Yao, X. H. Xu, and S. J. Tang, “Wirelesslink scheduling under physical interference model,” in Proc. Annu. JointConf. IEEE Comput. Commun. Soc., 2011, pp. 838–845.
[30] T. Moscribroda, R. Wattenhofer, and A. Zollinger, “Topology controlmeets SINR: The scheduling complexity of arbitrary topologies,” in Proc.ACM Int. Symp. Mobile Ad Hoc Netw. Comput., 2006, pp. 310–321.
[31] L. B. Le, E. Modiano, C. Joo, and N. B. Shroff, “Longest-queue-firstScheduling under SINR interference model,” in Proc. ACM Int. Symp.Mobile Ad Hoc Netw. Comput., 2010, pp. 41–50.
[32] D. Yang, X. Fang, G. Xue, A. Irani, and S. Misra, “Simple and effectivescheduling in wireless networks under the physical interference model,”in Proc. IEEE Global Telecommun. Conf., Miami, FL, Dec. 2010, pp. 1–5.
[33] G. Brar, D. Blough, and P. Santi, “Computationally efficient schedulingwith the physical interference model for throughput improvement in wire-less mesh networks,” in Proc. ACM Int. Symp. Mobible Ad Hoc Netw.Comput., 2006, pp. 2–13.
[34] C. Scheideler, A. Richa, and P. Santi, “An O(log n) dominating setprotocol for wireless ad hoc networks under the physical interferencemodel,” in Proc. ACM Int. Symp. Mobile Ad Hoc Netw. Comput., 2008,pp. 91–100.
[35] J. Ryu, C. Joo, T. Kwon, N. B. Shroff, and Y. Choi, “Distributed SINRbased scheduling algorithm for multi-hop wireless networks,” in Proc.ACM MSWiM, Oct. 2010, pp. 376–380.
[36] X. Lin and S. Rasool, “Constant-time distributed scheduling policies forad hoc wireless networks,” IEEE Trans Autom. Control, vol. 54, no. 2,pp. 231–242, Feb. 2009.
[37] D. Stoyan, W. S. Kendall, and J. Mecke, Stochastic Geometry and itsApplications, 2nd ed. New York: Wiley, 1995.
[38] M. Haenggi, “On distances in uniformly random networks,” IEEE Trans.Inf. Theory, vol. 51, no. 10, pp. 3584–3586, Oct. 2005.
[39] M. Haenggi and R. K. Ganti, “Interference in large wireless networks,”Found. Trends Netw., vol. 3, no. 2, pp. 127–248, Feb. 2009.
[40] H. Royden, Real Analysis, 3rd ed. Englewood Cliffs, NJ: Prentice-Hall,1988.
[41] J. G. Dai and B. Prabhakar, “The throughput of data switches with andwithout speedup,” in Proc. Annu. Joint Conf. IEEE Comput. Commun.Soc., Mar. 2000, vol. 2, pp. 556–564.
Qiao Li (S’07) received the B.Eng. degree in 2006from Tsinghua University, Beijing, China, and theM.S. degree in 2008 from Carnegie Mellon Univer-sity, Pittsburgh, PA, where he is currently workingtoward the Ph.D. degree.
His research interests include distributed al-gorithms, smart grid technologies, and wirelessnetworking.
Rohit Negi (S’98–M’00) received the B.Tech. de-gree in electrical engineering from the Indian In-stitute of Technology, Bombay, India, in 1995 andthe M.S. and Ph.D. degrees in electrical engineeringfrom Stanford University, Stanford, CA, in 1996 and2000, respectively.
Since 2000, he has been with the Electricaland Computer Engineering Department, CarnegieMellon University, Pittsburgh, PA, where he is aProfessor. His research interests include signalprocessing, coding for communications systems, in-
formation theory, networking, cross-layer optimization, and sensor networks.Dr. Negi received the President of India Gold Medal in 1995.
http://ieeexploreprojects.blogspot.com



























![Improved Algorithms for Maximal Clique Search in Uncertain ... Algorithms for Maximal... · maximal clique model which has also been extensively studied in the literature [7], [8],](https://img.pdfslide.us/doc/110x75/5d4f555588c9937a2b8b9969/improved-algorithms-for-maximal-clique-search-in-uncertain-algorithms-for-maximal.jpg)