- 1.
- Nano-Particulate Materials Processing Laboratory
- School of Materials Science and Engineering
- FERROMAGNETIC SHAPE MEMORY ALLOYS ( FSMAs )
2. Contents
- Introduction to Shape Memory Alloys
3. Introduction to Shape Memory Alloys.
- Shape Memory Alloys (SMAs)are a unique class of metal alloys
that can recover apparent permanent strains when they are heated
above a certain temperature.
- The SMAs have twostable phases- the high-temperature phase,
calledausteniteand the low-temperature phase, calledmartensite . In
addition, the martensite can be in one of two
forms:twinnedanddetwinned . A phase transformation which occurs
between these two phases upon heating/cooling is the basis for the
unique properties of the SMAs. The key effects of SMAs associated
with the phase transformation arepseudoelasticityandshape memory
effect .
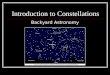
4. Temperature-induced phase transformation of an SMA without
mechanical loading Phase transformation in a NiTi SMA as seen by
Differential Scanning Calorimeter. M s : Martensite starting
temperature M f : Martensite finishing temperature A s : Austenite
starting temperature A f : Austenite finishing temperature 5.
Pseudoelasticity
- Thepseudo elasticbehavior of SMAs is associated with recovery
of the transformation strain upon unloading. The super elastic
behavior is observed during loading and unloadingabove A 0 Sand is
associated with stress-induced martensite and reversal to austenite
upon unloading.
6. Two phenomena in SMA 7. SMA Stress Strain Temperature Phase
Diagram. Stress vs. Temperature diagram with SMA phases 8.
Contents
- Introduction to Shape Memory Alloys
9. Ferromagnetic SMA Martensitic Alloys Natural SMA
Ferromagnetic Alloys The location of magnetic SMAs in the len-shape
region formed by the overlap of SMAs and ferromagnetic alloys FSMA
candidates: Ni 2 MnGa,Fe-Pd,Fe 3 Pt CoNiAl 10. Ferromagnetic SMA
(FSMA): background Temperature, External Stress, Magnetic Field
Martensitic Transformation Change of Physical Properties and
Lattice Parameters (large strain) Shape Memory Effect (SME),
Superelasticity (SE) Martensite phase Austenite phase Temperature (
T ) Magnetic Field ( H ) Stress ( ) 11. Possible magnetic field
driving mechanisms for FSMA actuators
- Several driving mechanisms (by magnetic field) of actuators
based on FSMAs have been proposed and studied. Three main possible
driving mechanisms:
- Magnetic Field Induced Phase Transformation [Direct
Effect]
- Variant Rearrangement by Magnetic Field in Fully Martensitic
Phase
- Stress Induced Martensitic Transformation by Magnetic Field
Gradient[Indirect Effect, Hybrid Mechanism]
12. Mechanism of magnetic shape memory
- The shape changes that cause the strokes in
-
- Conventional magnetostriction,
-
- Magnetically driven shape memory materials.
13. Magnetic field induced redistributionof the twin variants
The magnetic moments without the external field The rotation of the
magnetic moments within the twins The redistribution of the twin
variants A simplified presentation of the MSM effect in a single
crystalline actuating element. 14. Comparisons of magnetic field
actuating mechanisms 15. Contents
- Introduction to Shape Memory Alloys
16. FSMA Actuator Control System The structure of a commonly
used MSM actuators. The opposing forces against the MSM element are
spring force F springand external force F ext , while the MSM
element itself generates MFI force F mag . The FSMA Actuator
Control System 17. FePd (thin) spring actuator FePd and Fe coil
spring (the same size and dimensions)Spring constant:
FePd=0.29N/mm, Fe=0.84N/mm (3times) 18. FSMA Actuator AdaptaMat
A063-3 MSM Actutor Actuator A-1 2000 in a tensile test machine. The
diameter of the actuator is 260mm and the height 90mm 19. Linear
Motor The actuator can be driven faster/slower (average 70mm/s) and
in bigger/smaller steps (accuracy