Embed Size (px)
Citation preview

Highly efficient Active Front End enables trouble-free operation of low harmonic drives
by Dr. sc. ETH Michael Hartmann

Highly efficient Active Front End enables trouble-free operation of low harmonic drives 2
Active Front Ends (AFEs) have emerged as the most powerful and effective way to reduce input current distortions in variable speed drives (Fig. 1). Classic implementations using a six-switch, two-level converter, as often used for the inverter stage, show reduced efficiency and additional high-frequency common mode (CM) voltage at the DC-link compared to a passive diode bridge. The novel low-harmonic input stage, with or without regenerative capability, overcomes these drawbacks. Using a three-level topology with an optimized input filter and lossless damping of the filter stage by control makes it possible to implement a very compact, low-harmonic input stage with high performance and efficiency. By implementing an additional CM filter stage in the AFE, no additional high-frequency CM voltage is generated at the DC-link, and the bearings’ lifetime is not reduced as compared to a passive diode bridge rectifier. The three-level AFE topology with additional CM filter stage now offers a real alternative to the passive three-phase rectifier by making a low-harmonic input stage available.
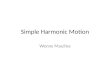
Modern variable speed drives (VSDs) must fulfill many requirements. As resources and energy are limited, the efficient use of energy becomes increasingly important. VSDs clearly contribute to the efficient use of energy, but not only the application must be efficient. The VSD itself must also be highly efficient. A passive diode bridge rectifier with smoothing inductors on either the DC or AC side (cf., Fig. 2(A)) is the most robust and efficient way to implement a VSD.
Efficiency, however, is not the only requirement. Due to the basic operating principle of three-phase passive rectifier circuits, their input currents are not sinusoidal but rather show low-frequency harmonics, as seen in Fig. 2. On the one hand, low- frequency harmonics distorts the grid, but on the other hand, they cause additional losses in the grid. Power quality, therefore, becomes another important requirement for VSDs so the demand for drives with low impact on the mains is also growing.
Abstract
Figure 1
Highly efficient low-harmonic input stage
Figure 2
(A) Passive three-phase diode bridge rectifier with AC-side connected smoothing inductors. (B) Typical input currents, and (C) corresponding harmonic spectrum of the input currents where the low-frequency harmonics are visible (5
th, 7
th, 11
th,
13th
, etc.)
(A) (B)
Introduction
(C)

Highly efficient Active Front End enables trouble-free operation of low harmonic drives 3
According to Fig. 2(C), a classic six-pulse passive diode bridge with AC chokes shows mainly 5th, 7th, 11th, and 13th harmonic components, and the typical total harmonic distortion of input currents (THDi) is slightly below 48%. These rectifier systems do not fulfill the requirements outlined in standards such as IEEE 519, where a total THDi of only 5% is demanded.
Several possibilities are available to comply with such stringent input current distortions and the different approaches have already been discussed in another white paper.1 One possibility to mitigate the low-frequency harmonics is the application of passive filters tuned to the low harmonics, mainly to the 5th/7th and 11th/13th harmonic components. Due to their low operating frequency, these filters are very heavy and bulky, show a considerably large voltage drop across the filter chokes at nominal load, and often result in increased DC-link voltage in no-load or light load conditions. In addition, they show a low power factor at partial load. The tuned filters could be excited by the mains and have to be damped, which reduces their efficiency. Overall, these filters are not the best choice for implementing a low-harmonic input stage.
Multipulse solutions, such as 12-pulse, 18-pulse, or 24-pulse rectifier systems, use a transformer with two or more phase-shifted windings and diode bridges. Due to the phase shift in the different windings, some low-frequency harmonics are compensated on the primary side of the transformer and only harmonics with the ordering number h=n·p±1 occur, where p is the pulse number of the rectifier system (e.g., 17th/19th and 35th/37th harmonic for p = 18). These systems show a high efficiency as well as the advantage of already including the transformer to the MV side in the drive. However, the high complexity and cost of the transformer clearly outweigh these advantages.
AFEs have become the most powerful and effective way to reduce input current distortions. In Fig. 3, the most common structure of an AFE — the classic six-switch, two-level active rectifier — is depicted. Many topologies have been invented for the implementation of AFEs with unidirectional and bidirectional power flow, and a good overview of these can be found in other articles.2, 3, 4 Due to the active shaping of the input currents, their THDi can be reduced to values significantly below 5%. In addition, AFEs offer a controlled DC-link voltage, which allows stable operation even in the event of weak mains.
Aside from the advantages of AFEs, there are also some limitations to note. The efficiency of these topologies is slightly below the efficiency of passive rectifier circuits. While the basic operating principle, which will be discussed in detail below, generates additional high-frequency CM voltage at the DC-link, it also generates some high-frequency emissions on the mains side, which must be filtered by a properly designed input filter.
Figure 3
Schematic of the classic six-switch, two-level AFE with input filter stage
1 Schneider Electric, “Choose the best harmonic mitigation solution for your drive,” White paper WP2121101EN, 2012. 2 J. W. Kolar and T. Friedli, “The Essence of Three-Phase PFC Rectifier Systems—Part I,” IEEE Transactions on Power
Electronics, Vol. 28, No. 1, pp. 176-198, Jan. 2013. 3 T. Friedli, M. Hartmann and J. W. Kolar, “The Essence of Three-Phase PFC Rectifier Systems—Part II,” IEEE
Transactions on Power Electronics, Vol. 29, No. 2, pp. 543-560, Feb. 2014. 4 B. Singh et al., "A review of three-phase improved power quality AC-DC converters, "IEEE Transactions on Industrial
Electronics, Vol. 51, No. 3, pp. 641-660, June 2004.

Highly efficient Active Front End enables trouble-free operation of low harmonic drives 4
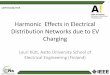
These drawbacks are addressed by selecting the right topology, by properly designing the input filter, and by applying a novel CM filter structure. The answer to all these requirements is a three-level topology with an additional CM filter stage, which shows very high efficiency and behaves like a passive rectifier circuit in terms of CM voltage. The total structure of the AFE is given in Fig. 4. Starting from the two-level topology, three additional (bidirectional) switches are connected between each phase and the midpoint of the DC-link capacitors. The basic function, proper design of the input filter, and the novel CM voltage mitigation strategy are discussed later in this paper.
In order to generate sinusoidal input currents in phase with the mains voltage, the current is shaped by the switching actions of the AFE semiconductors. The converter can only generate discrete voltage levels because the particular switches can only be opened or closed, and boost chokes LN are used as energy storage elements. A simplified equivalent model is given in Fig. 5(A). The grid has a voltage source with a purely sinusoidal mains voltage vN with mains frequency fN. The converter system generates the voltage vr and the difference between the two voltages applies across the boost choke. A positive voltage across this choke forces the current to increase, while a negative voltage across this choke forces the current to decrease. In order to achieve sinusoidal mains currents iN in phase with this voltage, the converter system must generate a voltage vr that shows a small phase shift to the mains voltage vN. The corresponding phasor diagram and voltage waveforms are given in Fig. 5(B) and 5(C), respectively. This phase shift depends on the size of the boost choke LN and is therefore dependent on the voltage and power rating of the AFE. Whereas this phase shift is typically in the range of 0.1° – 0.2° for a power rating of 10 kW/400 V, phase shifts of 1° – 2° occur for 100 kW/400 V. These phase shifts are compensated so that the mains current is in phase with the voltage at the input terminal of the drive.
As mentioned before, an AFE can only generate discrete voltage levels by either closing or opening the particular switches. A classic two-level voltage converter stage with six switches is only able to generate two different voltage levels per phase, but the three-level topology shown in Fig. 4 is able to generate three voltage levels per phase. Each phase can be connected to the positive DC-rail +VDC/2 by closing switch T1 or due to the corresponding freewheeling diodes. To the DC-link midpoint M by closing switches T3 or T4, or to the negative DC-rail –VDC/2 by closing switch T2, or due to the corresponding freewheeling diodes. There are a number of possible modulation techniques to generate the switching signals for the particular semiconductors (e.g., pulse-width modulation (PWM), hysteresis control, space vector modulation, etc.). An improved PWM strategy is often used to generate the converter voltages vr. The average value of the converter voltage (averaged over the switching frequency) must implement the required 50/60 Hz voltage component
Figure 4
Schematic of the three-level AFE, including LCL filter at the input and high-frequency CM filter stage
Basic operation principle

Highly efficient Active Front End enables trouble-free operation of low harmonic drives 5
for current shaping. The voltage differences between the discrete voltage levels and the required average values cause additional current ripple in the boost chokes. It’s evident that these voltage differences are smaller in a three-level converter system where three voltage levels are available for current shaping. The AFE shown in Fig. 4 is a boost-type converter, which means that the DC-link voltage is higher than the mains voltage, e.g., 650 V for a 400 V mains. The DC-link voltage is, however, directly related to losses as the switching losses are proportional to the DC-link voltage. Also, ripple currents generated in the boost chokes LN are dependent on the DC-link voltage. By applying the selected three-level topology, commutations with only half of the DC-link voltage occur and switching losses are reduced considerably. In addition, the DC-link voltage is not a fixed value but adapted according to the mains situations with a dedicated controller,5 and a novel thermal model ensures the thermal protection of all semiconductors.6 The switching frequency can, therefore, be increased, which considerably reduces the size of the boost choke and results in a very compact active input stage. A tradeoff between efficiency and power density must be found for implementing an efficient and compact drive with active input stage.
Figure 6
Qualitative voltage emissions of an AFE. In addition to the fundamental voltage component at 50/60 Hz, the emissions at switching frequency fs and multiples of the switching frequency are also shown. These emissions are well attenuated by a properly designed lowpass filter to values below 0.5%
Figure 5
(A) Simplified equivalent model of the active front end, (B) Phasor diagram of the model, and (C) corresponding voltage and current waveforms
(A) (B)
(C)
5 Schneider Electric, “Verfahren zur Regelung einer Gleichrichterschaltung“, AT 514684B1. 6 Schneider Electric, “Verfahren zur Ermittlung der thermischen Belastung von Halbleiterbauelementen“, AT patent
application AT 2015/51077.

Highly efficient Active Front End enables trouble-free operation of low harmonic drives 6
Noise voltages
An AFE does not show low harmonic input current components like passive diode bridges. The total harmonic distortion of input currents THDi is significantly below 5% and usually in the same range as the distortion of the feeding voltage. Due to the switching actions of the active converter system to shape the input current, the AFE generates noise voltages at switching frequency, which is in the range of several kHz (cf., Fig. 6). These emissions are attenuated by an input filter to values below 0.5% and will affect the mains only if the filter is not designed appropriately.
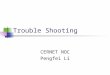
In Fig. 7, simulated voltage waveforms of the three-level AFE are shown together with their averaged low-frequency components (averaged over one switching period). There are three voltage levels available to form the phase voltage vr1. Next to the sinusoidal 50 Hz component, a third harmonic component is also visible, which is used to increase the modulation range of the converter system.
Due to the switching actions, not only differential mode (DM) voltages but also a CM voltage is generated. A CM voltage is a voltage common to all three phases of the DC-link and is defined by:
(1)
The CM voltage can be measured between the midpoint M of the two DC-link capacitors and N, and is depicted in Fig. 7(B). In addition to the high-frequency CM voltage, the third harmonic signal is also visible. In three-phase systems, the total phase voltage vr consists of a DM voltage component and a CM voltage component that are equal in all three phases:
(2)
3)()()()( 321 tvtvtvtvCM
++=
)()()( ,, tvtvtv CMiDMir +=
Figure 7
Simulated voltage waveforms of the three-level AFE together with the corresponding average value (averaged over one switching period): (A) Phase voltage measured between vr1 and N; (B) Common mode voltage measured between M and N; (C) Differential phase voltage measured between vr1 and M; and (D) Differential mode voltage measured between two phases (L1 and L2)

Highly efficient Active Front End enables trouble-free operation of low harmonic drives 7
The phase-related DM voltage (cf., Fig. 7(C)) can, therefore, be measured between vr and M, and is the actual voltage component used to shape the mains currents. The CM voltage component has no influence on the current shaping of the phase currents, but its high frequency components may cause unwanted effects. It is common to plot the differential voltage as the voltage measured between two phases, as shown in Fig. 7(D). All voltages show high frequency components, and their average values (averaged over one switching period) are either used to shape the mains currents or show the third harmonic component used to increase the voltage range.
As well as being the intended DM voltage component used to shape the mains currents, the AFE also generates a high-frequency CM voltage. This CM voltage adds to the CM voltage already generated by the inverter stage of the drive. This results in uncomfortable high-frequency CM voltage variations of the DC-link and the CM voltage. High-frequency CM voltage and its high dv/dt are the main sources of bearing currents, which are known to reduce the lifetime of the bearings or even destroy them in a very short period of time. A good overview on the drawbacks and classification of bearing currents can be found in another article.7 In addition, the insulation of the motor is stressed by the high-frequency CM voltage when there is a long cable.
A passive diode bridge rectifier shows only low-frequency harmonics, and only the CM voltage generated by the inverter stage of the drive is present. An AFE, in contrast, adds additional CM voltage and worsens the behavior of bearing currents. The CM voltage is dependent on the topology and the implementation. The three-level AFE topology shows considerably smaller CM voltage than a classic two-level converter. In Table 1, the CM voltage of a two-level AFE is compared to the CM voltage of a three-level AFE. Whereas the two-level AFE shows CM voltage levels of ±VDC/2 and ±VDC/6 and voltage steps of ±VDC/3, the three-level AFE shows only voltage levels of ±VDC/3 and ±VDC/6, which result in voltage steps of only ±VDC/6, a reduction of 55 Vrms. The reduction of the CM voltage levels, and consequently also the CM voltage steps applied to the motor, reduces the stress of the insulation and reduces the bearing currents. However, the dv/dt of 2 – 5 kV/µs still remains, which is a main cause of the high-frequency currents in the bearings.
As bearing currents and the life span of bearings are among the main concerns of a VSD, a CM voltage reduction method can be implemented in the three-level AFE. This is done by connecting the DC-link voltage midpoint M to the artificial star-point built by the filter capacitors CF as shown in Fig. 8(A). Due to this connection, the high frequency CM voltage is nearly eliminated. In Fig. 8(B), an equivalent circuit of the CM filter is shown. The total CM voltage VCM consists of a high- frequency component VCM,HF and a low-frequency component VCM,~.
Figure 8
(A) Three-level AFE with CM filter reduction. The DC-link capacitor midpoint M is connected to the artificial starpoint built by the filter capacitors CF. (B) Simplified equivalent circuit of the CM filter stage. The boost chokes LN build, together with the filter capacitors, a second order low-pass filter. The total CM voltage VCM consists of a high-frequency component VCM,HF and a low-frequency component VCM,~ (third harmonic component)
Reduction of CM voltage
7 A. Muetze and A. Binder. “Don't lose your bearings,” IEEE Magazine on Industry Applications. Vol. 12, No. 4, pp. 22-31, July-Aug, 2006.

Highly efficient Active Front End enables trouble-free operation of low harmonic drives 8
Topology
CM voltage
Voltage levels ± VDC/6, ± VDC/2 0, ± VDC/6, ± VDC/3 Low-frequency 3rd
harmonic
Voltage steps ± VDC/3 ± VDC/6 −
dv/dt dv/dt ≈ 2-5 kV/µs dv/dt ≈ 2-5 kV/µs dv/dt ≈ 0.050 V/µs
RMS voltage 154 Vrms 99 Vrms 35 Vrms (3rd harmonic)
Highest CM voltage Reduced CM voltage No high-frequency
CM voltage
The boost chokes build, together with the filter capacitors, a second order low pass filter that strongly attenuates the CM voltage components at the switching frequency and at multiples of the switching frequency. Only the low-frequency CM voltage remains across the filter capacitors and can therefore be measured at the DC-link voltage midpoint M. A resonant tank for CM signals is built by the filter capacitors CF and the boost chokes LN, which could be excited by the AFE. Hence, a particular controller is implemented in the firmware to introduce a sufficient amount of damping to prevent any unwanted oscillations of the CM filter stage. Due to the active damping of the CM filter stage by a dedicated controller, damping resistors with high dissipative losses are not required. This does not increase the losses of the AFE. The CM voltage of the AFE with CM reduction is also given in Table 1. As a result, no high-frequency CM voltage caused by the AFE is present at the DC-link, and only the CM voltage generated by the inverter stage (not shown in Table 1) remains at the same level of a drive with a passive rectifier bridge, something that has been used in industrial applications for decades. This is a tremendous improvement as a low-harmonic input stage using this concept doesn’t increase CM voltage and doesn’t increase bearing currents. For the first time in terms of CM voltage and bearing currents, it is possible to replace a passive diode bridge rectifier with a low-harmonic input stage, with or without energy recovery.
Table 1
Comparison of the CM voltage of a two-level AFE, a three-level AFE without CM reduction, and a three-level AFE with CM reduction for a DC-link voltage of 600 V. The three-level AFE with CM reduction shows no high-frequency CM voltage, which is equal to the situation of a passive diode bridge rectifier.

Highly efficient Active Front End enables trouble-free operation of low harmonic drives 9
Aside from the fundamental component, some voltage components at switching frequency and multiples of the switching frequency are also generated (cf., Fig. 6) inside an AFE. The high-frequency components are, however, filtered by a properly designed input filter, as indicated in Fig. 4, and only very small values, significantly below <0.5%, remain at the input terminal of the AFE. A proper design of the input filter is essential for the reliable operation of the AFE. On the one hand, the filter should implement sufficient attenuation so that the high-frequency voltage components inside the AFE are not transferred to the mains terminals and don’t disturb the grid. On the other hand, though, it must not be sensitive to disturbances in the mains and should not reduce the efficiency of the converter. As the filter is designed to attenuate the switching frequency components, which is usually in the range of several kHz for drive systems, the size of the filter is much smaller than a passive filter acting on the low-frequency harmonics (e.g., 5th and 7th harmonic). A high attenuation increases the size of the filter, so a balance between filter attenuation, filter losses, filter size, and damping of the filter must be found, as shown in Fig. 9(B).
An LCL filter structure, which is a well-established and robust filter structure, is chosen to meet these requirements (cf., Fig. 9(A)). The filter capacitors CF, together with the boost chokes LN and the filter chokes LF, build a resonant tank. Without any damping, this resonant tank could be excited by voltage variations on the grid and must therefore be sufficiently damped. The grid usually shows inductive behavior and the additional filter choke LF may not be required as it is already implemented by the grid, itself. In this case, the resonance frequency of the LC tank given by
(2)
would strongly depend on the impedance of the mains LM, which is related to the short circuit power of the feeding grid. A reliable damping of the resonant tank would be very challenging and, in many cases, impossible. An insufficiently damped input filter causes high currents in the filter capacitors, which would reduce its lifetime or even result in the breakdown of the filter capacitors. The filter chokes LF decouple the AFE and the filter capacitors from the grid and determine the resonance frequency for the defined mains conditions, ensuring that the filter can be well damped in all considered mains conditions. Oscillations of the filter do not occur, and the filter’s performance and lifetime are not degraded.
There are several ways to damp the filter. The most common is to add a snubber network, e.g., in parallel to the filter capacitors as shown in Fig. 10(A). Resistors Rs in series to capacitors Cs are connected in parallel to the filter capacitors CF. Although the snubber capacitors limit the current through the resistors Rs, considerable losses are introduced by this snubber network and the efficiency is reduced significantly. In addition, the size of this passive damping network does not comply with the requirement of the small filter size. These arguments are valid for
( )( )MFNFLCLres LLLC
f+
=//21
,π
Input filter design
Figure 9
(A) LCL filter structure of the AFE input filter, and (B) main constraints for the design and optimization of the filter
(A) (B)

Highly efficient Active Front End enables trouble-free operation of low harmonic drives 10
almost all damping networks where passive elements are used to damp the filter resonance.
A novel lossless control strategy can be applied to actively damp the input filter.8 The control strategy is implemented in the firmware of the AFE controller and does not require any additional passive components. The LC tank is, therefore, directly damped by the converter stage itself. This means that no additional losses occur due to passive damping elements and the efficiency of the AFE isn’t degraded. The resonance frequency is mainly determined by the filter choke LF, which ensures that the AFE operates well under all mains conditions specified in the datasheet.
A simulation is performed to demonstrate the implemented active damping strategy of an AFE with a power rating of 160 kW. The AFE is operated in parallel with a 1 MVA thyristor controlled rectifier (cf., Fig. 11). Due to the commutation effects of the thyristor controlled rectifier, the feeding mains voltage of the AFE is distorted. The simulation results are shown in Fig. 11(B) and 11(C), where the characteristic commutation notches are visible in the voltage. In Fig. 11(B), the active damping is not activated and the LC tank is excited by the voltage variations (commutation notches) of the grid. As a consequence of the insufficiently damped LCL filter structure, considerably large oscillations occur in the capacitor voltage and the phase current, which would considerably reduce the life span of the input filter.
8 Schneider Electric, “Verfahren zum Betrieb einer Umrichterschaltung mit LCL Filter,” AT 508390B1.
Figure 10
(A) AFE with input filter in LCL structure, including required damping network in RC-snubber configuration (Rs, Cs) across the filter capacitors CF. The passive snubber resistors cause additional losses of the input filter, which reduce the efficiency considerably. (B) Damping of the LCL filter using a lossless active damping strategy implemented in the controller of the AFE
Figure 11
(A) Structure used to demonstrate the performance of the active damping strategy. The three-level AFE is operated in parallel to a thyristor controller rectifier with a power rating of 1 MW. (B) Simulated input current im and capacitor voltage vCF when the filter is not damped, and (C) if the filter is damped using the lossless active damping control strategy implemented in the AFE controller
(A) (B)
(A)
(B) (C)

Highly efficient Active Front End enables trouble-free operation of low harmonic drives 11
After activating the active damping strategy in the controller, the filter is well damped (cf., Fig. 11(C)), and almost no high-frequency oscillations occur, either in the capacitor voltage or in the phase current. The phase currents follow the phase voltage where the commutation notches are still present. This clearly demonstrates the effectiveness of the applied damping strategy implemented in the AFE firmware and shows that the AFE is able to operate in such a distorted environment.
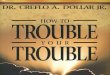
Fig. 12 shows the measurements of the mains current of a 160 kW drive with AFE. The drive is operated at a 400 V mains with 50 Hz mains frequency and at nominal power (Pnom=160 kW). In Fig. 12(A), the drive is operated in motor mode where the energy flows from the grid to the motor and, in Fig. 12(B), the drive is operated in regenerative mode where the motor feeds energy into the grid. The currents are nearly sinusoidal and in phase with the mains voltage (only mains voltage of phase L1 is shown). In both cases, the measured THDi of the mains currents is around 2%, however, the feeding voltage already shows a THDv of approximately 2%. The THDi of the mains current is primarily determined by the voltage distortion of the feeding mains. Tests in the lab showed that the drive can easily generate mains currents with a THDi ≈ 1% if the mains voltage is purely sinusoidal.
In addition to input current distortion, the efficiency of the AFE has also been measured, resulting in an exceptionally high value of 98.5% at nominal load in motor mode. This high value is mostly due to the reduced switching losses of the three-level topology, the optimized DC-link voltage, and the lossless damping of the optimized LCL input filter.
Performance
Figure 12
Measured mains current of a 160 kW drive operating at nominal power (VLL = 400 V, fN = 50 Hz, Po = 160 kW). (A) Operating in motor mode (energy flow from the grid to the motor), and (B) operating in regenerative mode (energy flow from the motor to the grid). The feeding voltage already shows a THDv of 2%
(A) Motor mode, THDi = 2.3% (B) Regenerative mode, THDi = 1.8%

Highly efficient Active Front End enables trouble-free operation of low harmonic drives 12
It is now possible for the first time to replace a passive diode bridge rectifier with a low-harmonic input stage or a regenerative input stage. Due to the implemented CM filter stage, no additional high-frequency CM voltage occurs at the DC-link. Only a low-frequency CM voltage component similar to that of a passive diode bridge rectifier is present. The bearing currents are, therefore, not increased compared to a standard VSD with a passive diode bridge rectifier, and the life span of the bearings is not reduced by applying the novel AFE. Due to the optimized LCL input filter, high-frequency emissions caused by the switching actions of the AFE are well attenuated to values below 0.5%. The possible resonance of the input filter is damped by a novel lossless active damping control strategy implemented in the controller of the AFE. The LC-tank built by the filter elements cannot be excited by the grid, which is one less concern for the user. Due to the three-level topology, the lossless damping of the input filter, and the optimized DC-link voltage, the novel AFE shows very high efficiency. This high efficiency, combined with the high input current quality, small size, and the elimination of the high-frequency CM voltage caused by the AFE, make the three-level AFE with additional CM filter the ideal choice for a drive system with low-harmonic input stage — with or without regenerative capability.
About the author
Michael Hartmann received a B.S. degree (Hons.) and an M.Sc. degree (Hons.) in electrical engineering from the University of Technology Vienna, in 2005 and 2006, respectively. He has a Ph.D. from the Power Electronic Systems Laboratory, Swiss Federal Institute of Technology, Zurich, Switzerland, where his research focused on active three-phase rectifier systems with ultrahigh switching frequencies and three-phase rectifiers for aircraft applications. He is currently with Schneider Electric Drive Technology and Systems, based in Vienna, where he is involved in research on high-efficiency three-phase power converter systems for low- and medium-voltage power drives. His research interests further include three-phase power conversion, electromagnetic interference, and switched-mode power amplifiers using multicell topologies.
Summary
©20
16 S
chne
ider
Ele
ctric
. All
Rig
hts
Res
erve
d. S
chne
ider
Ele
ctric
| Li
fe Is
On
is a
trad
emar
k an
d th
e pr
oper
ty o
f Sch
neid
er E
lect
ric S
E, i
ts s
ubsi
diar
ies,
and
affi
liate
d co
mpa
nies
. 99
8-19
7869
93_G
MA-
US