Embed Size (px)
Citation preview

Experimental setup being simulated
Reference:
http://www.ostfalia.de/export/sites/default/de/pws/turtur/DownloadVerzeichnis/Series-english-5Articles.pdf
On pdf-pages 80-93 of the referenced document, a ‘zero-point energy motor’ is described, and a simulation presented which appears to show 1 kW available output power for no apparent input cost.
The code has been copy-pasted and converted into a Matlab file called ‘Turtur_magnet1kW.m’. The behaviour of this simulation will be presented in the following slides.

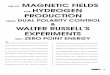
Reproduction of Prof. Turtur’s original graphs
Outputs from the simulation, as calculated by Prof. Turtur:converted power = (623.3459 +/- 4.1197) Wattsextracted power at the load resistor = 1070.0658 Watts
Here ‘converted power’ is a measure of the mechanical and electrical energy gained by the ZPE motor system.‘Extracted power’ is what is freely available to be used externally.Note that both these values have increased showing that the ZPE motor system has apparently increased in energy even as energy is extracted from it.
In the two plots above, the voltages and torques in the system have been calculated from the solution generated by the simulation. The black line is an error value showing how closely the solution matches the equations we are trying to solve. One can see that the torque error (black line on right figure) is not zero, let’s look at this more closely.

Equations being solved: Charge
There are two master equations that are being solved in this program, one for charge ‘Q’ and the other for magnet angular position ‘ ’. The equation governing the charge is
L d2Q/dt2 + (R+Rlast/2) dQ/dt + 1/C Q - (n Bo A) d /dt sin( ) = 0
This equation has four terms, these are plotted in red (=L d2Q/dt2 ) , green (=(R+Rlast/2) dQ/dt), blue (=1/C Q ) and magenta (=- (n Bo A) d /dt sin( )) in the following plot (the green line is close to zero, so not clearly visible)
The black line is the sum of the four terms which should equal to zero, and we can see that it is indeed close to zero on this scale.
Foot note: the value of Rlast is divided by two due to the way Prof. Turtur implemented the calculation.

The equation governing angular position is
J d2 /dt2 + (n Bo A) dQ/dt sin( ) = 0
This has two terms, the first is plotted in red (=J d2 /dt2 ) and the second plotted in green (= (n Bo A) dQ/dt sin( ) ).
The sum of these should equal to zero, this is plotted as the black line.
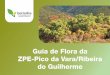
Equations being solved: Angular position
We can see that the black line is clearly not close to zero on this scale! Any non-zero value acts as an extra torque driving the motor, and we can see that there appears to be a torque applied preferentially in one direction at regular intervals during the cycle. This will speed the rotor up. However, this is a numerical error. Such a torque does not actually exist and is only present due to errors in the finite difference implementation.
One common problem in finite difference solutions is that the time step is too large. Let’s reduce the time step to investigate the behaviour of the solution.

Reduce the time step: tresolution=4
converted power = (3.6125 +/- 0.00038109) Wattsextracted power at the load resistor = 15.3035 Watts
If we reduce the time step x4 while running the simulation over the same time period, we get much better behaved solutions. These increase only a small amount, with the internal energy increasing at 3 W while extracted power is now apparently 15 W. These numbers are down x100 as compare to the first run BUT the physical situation is identical!
Note that the black line on the torque plot is now much closer to zero – in other words, this solution is much closer to the true solution of the differential equations.

converted power = (-9.6615 +/- 5.0371e-005) Wattsextracted power at the load resistor = 11.5181 Watts
Reducing the time step x16 as compared to the first run and one finds that the extracted power and mechanical loss are within error margins of each other. One sees that the motor is suffering a 9.66 W loss as the output resistorextracts 11.5 W. This is still marginally over-unity, but now one starts to expect the true situation to be conservative.
Reduce the time step: tresolution=16

converted power = (-12.3436 +/- 1.313e-005) Wattsextracted power at the load resistor = 10.8107 Watts
Reduce the time step: tresolution=100
In the last run of this test, the time step is reduced x100 as compared to the initial run.
Now one finds that the motor loses more energy than is extracted externally. This agrees with ‘standard’ physics which says that any extracted power must be paid for by the system internal energy. There is also an internal loss in the resistance of the inductor coil which accounts for the difference.

Reduce the time step: tresolution=100
Zooming in to the error curves of the previous slide one finds that the voltage error is of order 0.05 V while the peak voltages in the system are of order 500 Volts, and the torque error is of order 2 mNm while the peak torques are of order 4 Nm.
Hence both errors are less than 0.1% of the peak values, and the final conservative solution is quite accurate.
Note that the torque error still acts to speed the motor up very slightly, as it is mostly positive, but at this low level and for this short a time period does not present a significant error.

Summary
A study of Prof. Turtur’s simulation of a magnetic ZPE converter has been made.
The code provided by Prof. Turtur has been imported into Matlab where the initial plots showing an apparent excess of energy have been reproduced.
However, it has been found that this was due to an insufficently short time step used in the algorithm. The too large time step causes significant errors in the finite difference implementation.
The procedure described by Prof. Turtur on pdf-page 86 which improves the tuning of the parameters is only a way of maximising the numerical error.
Reducing the time step x100 restores the simulation to ‘standard’ behaviour where the power extracted is paid for by the power loss of the motor/LCR system. The error in this case can be calculated and is found to be close to ideal.
Hence the claim of 1 kW power production is not supported, but was an artifact of numerical error.