Embed Size (px)
DESCRIPTION
This paper proposes an approach to algorithmically synthesize control strategies for discrete-time nonlinear uncertain systems based on reachable set computations using the ellipsoidal calculus. For given ellipsoidal initial sets and bounded ellipsoidal disturbances, the proposed algorithm iterates over conservatively approximating and LMI-constrained optimization problems to compute stabilizing controllers. The method uses first-order Taylor approximation of the nonlinear dynamics and a conservative approximation of the Lagrange remainder.
Citation preview

Control of Uncertain Nonlinear SystemsUsing Ellipsoidal Reachability Calculus
Leonhard Asselborn Dominic Groß Olaf Stursberg
Institute of Control and System TheoryUniversity of Kassel
www.control.eecs.uni-kassel.de
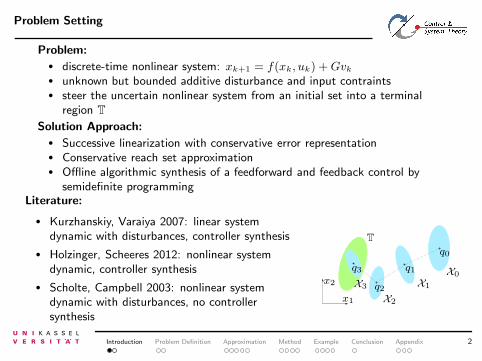
Problem Setting
Problem:• discrete-time nonlinear system: xk+1 = f(xk, uk) +Gvk• unknown but bounded additive disturbance and input contraints• steer the uncertain nonlinear system from an initial set into a terminal
region TSolution Approach:
• Successive linearization with conservative error representation• Conservative reach set approximation• Offline algorithmic synthesis of a feedforward and feedback control by
semidefinite programmingLiterature:
• Kurzhanskiy, Varaiya 2007: linear systemdynamic with disturbances, controller synthesis
• Holzinger, Scheeres 2012: nonlinear systemdynamic, controller synthesis
• Scholte, Campbell 2003: nonlinear systemdynamic with disturbances, no controllersynthesis
X0
X1
X2
X3x2
x1
Tq0
q1
q2
q3
Introduction Problem Definition Approximation Method Example Conclusion Appendix 2
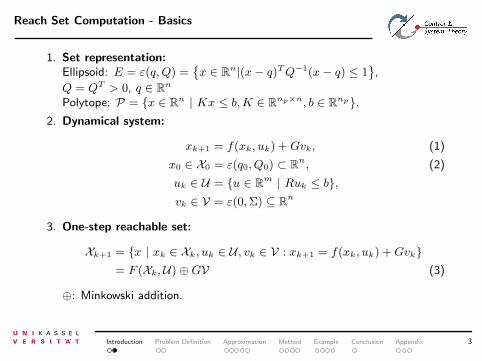
Reach Set Computation - Basics
1. Set representation:Ellipsoid: E = ε(q,Q) =
{x ∈ Rn|(x− q)TQ−1(x− q) ≤ 1
},
Q = QT > 0, q ∈ Rn
Polytope: P = {x ∈ Rn | Kx ≤ b,K ∈ Rnp×n, b ∈ Rnp}.
2. Dynamical system:
xk+1 = f(xk, uk) +Gvk, (1)
x0 ∈ X0 = ε(q0, Q0) ⊂ Rn, (2)
uk ∈ U = {u ∈ Rm | Ruk ≤ b},
vk ∈ V = ε(0,Σ) ⊆ Rn
3. One-step reachable set:
Xk+1 = {x | xk ∈ Xk, uk ∈ U , vk ∈ V : xk+1 = f(xk, uk) +Gvk}
= F (Xk,U)⊕GV (3)
⊕: Minkowski addition.
Introduction Problem Definition Approximation Method Example Conclusion Appendix 3

Problem Definition
Problem 1
Determine a control law uk = κ(xk, k), for which it holds that:
uk ∈ U ∀ k ∈ {0, 1, . . . , N − 1}, N ∈ N, xk ∈ Xk
and that it stabilizes the nonlinear system from an initial set X0 = ε(q0, Q0) ina finite number N of time steps into an ellipsoidal terminal set T = ε(0, T )which is parametrized by T ∈ Rn×n and is centered in the origin 0:
∃ N ≥ 0 : Xk+1 = F (Xk, Uk)⊕GV
XN ⊆ T = ε(0, T ), k ∈ {0, 1, . . . , N − 1}
Introduction Problem Definition Approximation Method Example Conclusion Appendix 4
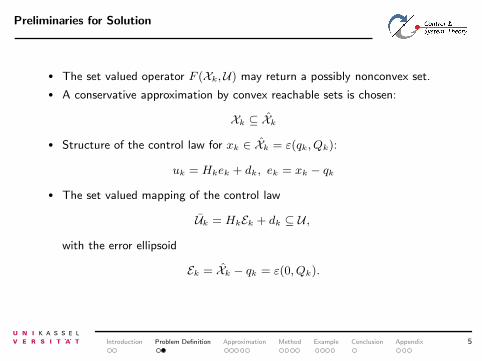
Preliminaries for Solution
• The set valued operator F (Xk,U) may return a possibly nonconvex set.
• A conservative approximation by convex reachable sets is chosen:
Xk ⊆ Xk
• Structure of the control law for xk ∈ Xk = ε(qk, Qk):
uk = Hkek + dk, ek = xk − qk
• The set valued mapping of the control law
Uk = HkEk + dk ⊆ U ,
with the error ellipsoid
Ek = Xk − qk = ε(0, Qk).
Introduction Problem Definition Approximation Method Example Conclusion Appendix 5

Local Conservative Linearization of the Dynamics (1)
• First order Taylor series expansion with ξk = [xk, uk]T and ξk = [qk, p]
T :
∃z ∈{αξk + (1− α)ξk | α ∈ [0, 1]
}:
f(xk, uk) = f(ξk) +∂f(ξk)
∂ξk
∣∣∣∣ξk=ξk
(ξk − ξk) + L(ξk, z)
• Representation of the nonlinear dynamics with the error term L(ξk, z):
xk+1 ∈ Ak(xk − xk) +Bk(uk − uk) + L(ξk, z) + f(xk, uk) +Gvk
Introduction Problem Definition Approximation Method Example Conclusion Appendix 6
Local Conservative Linearization of the Dynamics (2)
• Overapproximation of L(ξk, z) by an ellipsoid Lell(ξk) = ε(lk, Lk):
Xk+1 := Ak(Xk − qk)⊕Bk(U − p)⊕ Lell(ξk)⊕ f(qk, p)⊕GV ⊇ Xk+1
• The set valued local closed-loop dynamics for the conservative locallylinearized system:
Xk+1 =(Ak +BkHk)Xk ⊕GV ⊕ Lell(ξk) . . .
+ f(qk, p)− (Ak +BkHk)qk +Bkdk −Bkp(4)
Introduction Problem Definition Approximation Method Example Conclusion Appendix 7
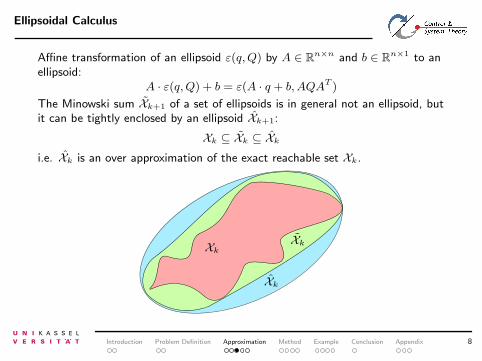
Ellipsoidal Calculus
Affine transformation of an ellipsoid ε(q,Q) by A ∈ Rn×n and b ∈ Rn×1 to anellipsoid:
A · ε(q,Q) + b = ε(A · q + b, AQAT )
The Minowski sum Xk+1 of a set of ellipsoids is in general not an ellipsoid, butit can be tightly enclosed by an ellipsoid Xk+1:
Xk ⊆ Xk ⊆ Xk
i.e. Xk is an over approximation of the exact reachable set Xk.
XkXk
Xk
Introduction Problem Definition Approximation Method Example Conclusion Appendix 8
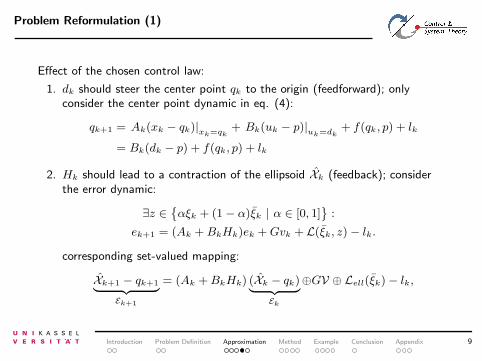
Problem Reformulation (1)
Effect of the chosen control law:
1. dk should steer the center point qk to the origin (feedforward); onlyconsider the center point dynamic in eq. (4):
qk+1 = Ak(xk − qk)|xk=qk+ Bk(uk − p)|
uk=dk+ f(qk, p) + lk
= Bk(dk − p) + f(qk, p) + lk
2. Hk should lead to a contraction of the ellipsoid Xk (feedback); considerthe error dynamic:
∃z ∈{αξk + (1− α)ξk | α ∈ [0, 1]
}:
ek+1 = (Ak +BkHk)ek +Gvk + L(ξk, z)− lk.
corresponding set-valued mapping:
Xk+1 − qk+1︸ ︷︷ ︸
Ek+1
= (Ak +BkHk) (Xk − qk)︸ ︷︷ ︸
Ek
⊕GV ⊕ Lell(ξk)− lk,
Introduction Problem Definition Approximation Method Example Conclusion Appendix 9
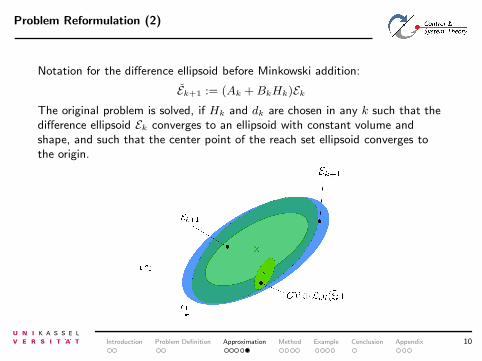
Problem Reformulation (2)
Notation for the difference ellipsoid before Minkowski addition:
Ek+1 := (Ak +BkHk)Ek
The original problem is solved, if Hk and dk are chosen in any k such that thedifference ellipsoid Ek converges to an ellipsoid with constant volume andshape, and such that the center point of the reach set ellipsoid converges tothe origin.
Introduction Problem Definition Approximation Method Example Conclusion Appendix 10
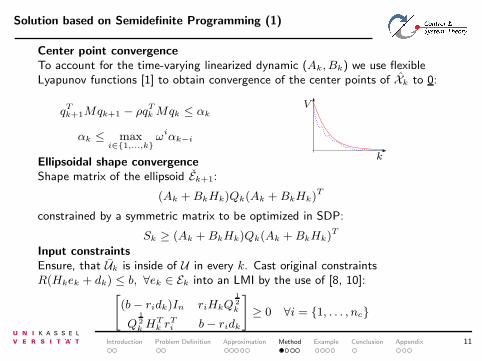
Solution based on Semidefinite Programming (1)
Center point convergenceTo account for the time-varying linearized dynamic (Ak, Bk) we use flexibleLyapunov functions [1] to obtain convergence of the center points of Xk to 0:
qTk+1Mqk+1 − ρq
Tk Mqk ≤ αk
αk ≤ maxi∈{1,...,k}
ωiαk−i
V
kEllipsoidal shape convergenceShape matrix of the ellipsoid Ek+1:
(Ak +BkHk)Qk(Ak +BkHk)T
constrained by a symmetric matrix to be optimized in SDP:
Sk ≥ (Ak +BkHk)Qk(Ak +BkHk)T
Input constraintsEnsure, that Uk is inside of U in every k. Cast original constraintsR(Hkek + dk) ≤ b, ∀ek ∈ Ek into an LMI by the use of [8, 10]:
[
(b− ridk)In riHkQ12k
Q12k H
Tk rTi b− ridk
]
≥ 0 ∀i = {1, . . . , nc}
Introduction Problem Definition Approximation Method Example Conclusion Appendix 11

Solution based on Semidefinite Programming (2)
Semidefinite programm to be solved in any k:
minSk,Hk,dk,αk
trace(Sk) (5)
s. t. :
center point convergence:
qTk+1Mqk+1 − ρqTk Mqk ≤ αk
qk+1 = Bk(dk − p) + f(qk, p) + lk
αk ≤ maxi∈{1,...,k} ωiαk−i
ellipsoidal shape convergence:
trace(Sk) ≤ trace(Qk)[
Sk (Ak +BkHk)T
(Ak +BkHk) Q−1
k
]
≥ 0
input constraints:
(b− ridk)In riHkQ
12k
Q12k H
Tk rTi b− ridk
≥ 0, ∀i = {1, . . . , nc}.
Introduction Problem Definition Approximation Method Example Conclusion Appendix 12
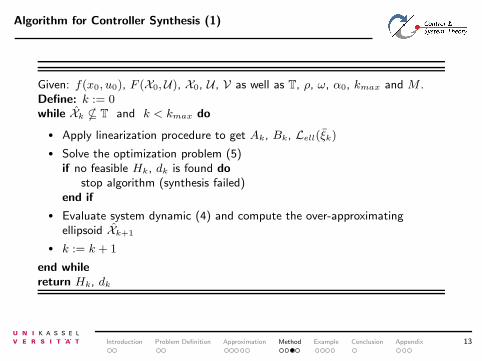
Algorithm for Controller Synthesis (1)
Given: f(x0, u0), F (X0,U), X0, U , V as well as T, ρ, ω, α0, kmax and M .Define: k := 0while Xk * T and k < kmax do
• Apply linearization procedure to get Ak, Bk, Lell(ξk)
• Solve the optimization problem (5)if no feasible Hk, dk is found do
stop algorithm (synthesis failed)end if
• Evaluate system dynamic (4) and compute the over-approximatingellipsoid Xk+1
• k := k + 1
end whilereturn Hk, dk
Introduction Problem Definition Approximation Method Example Conclusion Appendix 13
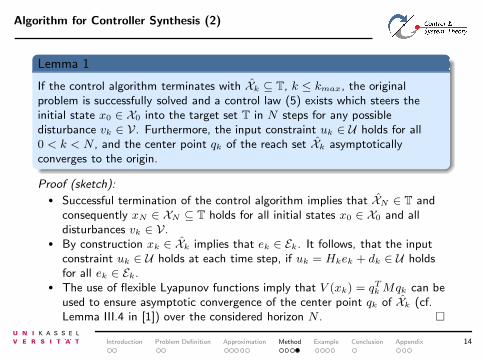
Algorithm for Controller Synthesis (2)
Lemma 1
If the control algorithm terminates with Xk ⊆ T, k ≤ kmax, the originalproblem is successfully solved and a control law (5) exists which steers theinitial state x0 ∈ X0 into the target set T in N steps for any possibledisturbance vk ∈ V. Furthermore, the input constraint uk ∈ U holds for all0 < k < N , and the center point qk of the reach set Xk asymptoticallyconverges to the origin.
Proof (sketch):• Successful termination of the control algorithm implies that XN ∈ T and
consequently xN ∈ XN ⊆ T holds for all initial states x0 ∈ X0 and alldisturbances vk ∈ V.
• By construction xk ∈ Xk implies that ek ∈ Ek. It follows, that the inputconstraint uk ∈ U holds at each time step, if uk = Hkek + dk ∈ U holdsfor all ek ∈ Ek.
• The use of flexible Lyapunov functions imply that V (xk) = qTk Mqk can beused to ensure asymptotic convergence of the center point qk of Xk (cf.Lemma III.4 in [1]) over the considered horizon N . �
Introduction Problem Definition Approximation Method Example Conclusion Appendix 14

Control of a Three-Tank-System: Dynamic Model
• state: height of fluid inside each tank
• input: valve for in- and outflow with nonlinear characteristic curve
• disturbance: additive measurement uncertainty
• task: fill empty tank system to reference height
System:
Introduction Problem Definition Approximation Method Example Conclusion Appendix 15
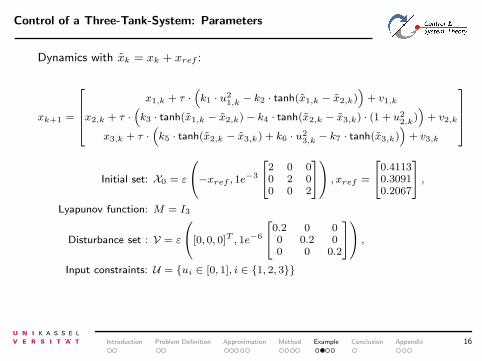
Control of a Three-Tank-System: Parameters
Dynamics with xk = xk + xref :
xk+1 =
x1,k + τ ·(
k1 · u21,k
− k2 · tanh(x1,k − x2,k))
+ v1,k
x2,k + τ ·(
k3 · tanh(x1,k − x2,k) − k4 · tanh(x2,k − x3,k) · (1 + u22,k
))
+ v2,k
x3,k + τ ·(
k5 · tanh(x2,k − x3,k) + k6 · u23,k
− k7 · tanh(x3,k))
+ v3,k
Initial set: X0 = ε
−xref , 1e−3
2 0 00 2 00 0 2
, xref =
0.41130.30910.2067
,
Lyapunov function: M = I3
Disturbance set : V = ε
[0, 0, 0]T , 1e−6
0.2 0 00 0.2 00 0 0.2
,
Input constraints: U = {ui ∈ [0, 1], i ∈ {1, 2, 3}}
Introduction Problem Definition Approximation Method Example Conclusion Appendix 16
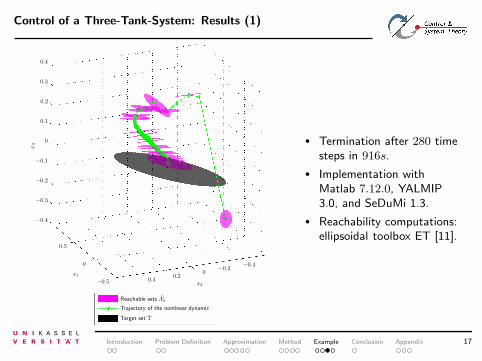
Control of a Three-Tank-System: Results (1)
Target set T
Trajectory of the nonlinear dynamic
Reachable sets Xk
x3
x2
x1
−0.5
0
0.5
−0.4−0.2
00.2
0.4
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
• Termination after 280 timesteps in 916s.
• Implementation withMatlab 7.12.0, YALMIP3.0, and SeDuMi 1.3.
• Reachability computations:ellipsoidal toolbox ET [11].
Introduction Problem Definition Approximation Method Example Conclusion Appendix 17
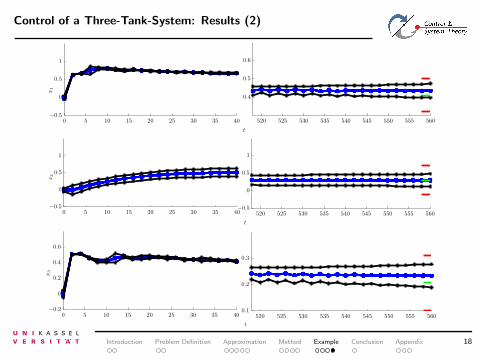
Control of a Three-Tank-System: Results (2)
t
t
t
x3
x2
x1
520 525 530 535 540 545 550 555 560
520 525 530 535 540 545 550 555 560
520 525 530 535 540 545 550 555 560
0 5 10 15 20 25 30 35 40
0 5 10 15 20 25 30 35 40
0 5 10 15 20 25 30 35 40
0.1
0.2
0.3
−0.5
0
0.5
1
0.4
0.5
0.6
−0.2
0
0.2
0.4
0.6
−0.5
0
0.5
1
−0.5
0
0.5
1
Introduction Problem Definition Approximation Method Example Conclusion Appendix 18

Conclusion
Summary:
• Algorithm for the stabilization of an uncertain nonlinear system
• Reach set approximation by using conservative linearization
• Stablization problem reformulated as an iterative problem
• Numerical example to show a successful application
Future work:
• Tighter approximation of the Lagrange remainder
• Consider probabilistic modeling of the disturbances in order to get aprobabilistic success rate of the control law
Introduction Problem Definition Approximation Method Example Conclusion Appendix 19

References
[1] M. Lazar:Flexible Control Lyapunov Functions;American Control Conference, pp. 102-107, 2009.
[2] A. Kurzhanski, I. Valyi:Ellipsoidal Calculus for Estimation and Control;Birkhauser, 2009.
[3] T. O. Apostol:Calculus, Vol. I;Xerox College Publishing, 1967.
[4] M. Althoff:Reachability Analysis and its Application to the Safety Assessment of Autonomous Cars;Disertation, TU Muenchen, 2010.
[5] S. Boyd, L. E. Ghaoui, E. Feron, V. Balakrishnan:Linear Matrix Inequalities in System and Control Theory;SIAM Studies in Applied Mathematics, 1994.
[6] A. A. Kurzhanskiy, P. Varaiya:Reach set computation and control synthesis for discrete-time dynamical systems with disturbances;Automatica, Vol. 47, pp. 1414-1426, 2011.
[7] M. Althoff, O. Stursberg, M. Buss:Reachability Analysis of Nonlinear Systems with Uncertain Parameters using Consverative Linearization;IEEE Conf. on Decision and Control, pp. 4042-4048, 2008.
[8] P. J. Goulart, E. C. Kerrigan, J. M. Maciejowski:Optimization Over State Feedback Policies for Robust Control with Constraints;Automatica, Vol. 42, Issue 4, pp. 523-533, 2006.
[9] S. V. Rakovic, E. C. Kerrigan, D. Q. Mayne, J. Lygeros:Reachability Analysis of Discrete-Time Systems with Disturbances;IEEE Trans. on Automatic Control, Vol. 51, pp. 546-561,2006.
Introduction Problem Definition Approximation Method Example Conclusion Appendix 20

References
[10] A. Nemirovskii:Advances in Convex Optimization: conic programming;Int. Congress of Mathematicians, pp. 413-444, 2006.
[11] A. A. Kurzhanskiy, P. Varaiya:Ellipsoidal Toolbox;http://code.google.com/p/ellipsoids, 2006.
[12] A. Girard, C. L. Guernic, O. Maler:Efficient Computation of reachable sets of linear time-invariant systems with inputs;Hybrid Systems: Computation and Control, Springer-LNCS, Vol. 3927, pp. 257-271, 2006.
[13] A. Girard, C. L. Guernic:Efficient reachability analysis for linear systems using support functions;Proc. 17th IFAC World Congress, pp. 8966-8971, 2008.
[14] A. A. Kurzhanskiy, P. Varaiya:Ellipsoidal Techniques for Reachability Analysis of Discrete-Time Linear Systems;IEEE Trans. on Automatic Control, Vol. 52(1), pp. 26-38, 2007.
[15] M. J. Holzinger, D. J. Scheeres:Reachability Results for Nonlinear Systems with Ellipsoidal Initial Sets;IEEE Trans. on Aerospace and Electronic Systems, Vol. 48(2), pp. 1583-1600, 2012.
[16] E. Scholte, M. E. Campbell:A Nonlinear Set-Membership Filter for On-line Applications;Int. J. of Robust and Nonlinear Control, Vol 13(15), pp.1337-1358, 2003.
[17] F. Yang, Y. Li:Set-Membership Fuzzy Filtering for Nonlinear Discrete-Time Systems;IEEE Trans. on Systems, Man, and Cybernetics, Vol. 40(1), pp. 116-124, 2010.
[18] T. Dang:Approximate Reachability Computation for Polynomial Systems;Hybrid Systems: Control and Computation, Springer-LNCS, Vol. 3927, pp 138-152, 2006.
[19] O. Stursberg, B.H. Krogh:Efficient Representation and Computation of Reachable Sets for Hybrid Systems;Hybrid Systems: Control and Computation, Springer-LNCS, Vol. 2623, pp 482-497, 2003.
Introduction Problem Definition Approximation Method Example Conclusion Appendix 21
Input Constraint
By substituting (5) into the input constraint in (1) it can be seen that the input constraint holds for all ek ∈ Ek if:
R(Hkek + dk) ≤ b, ∀ek ∈ Ek (6)
By row-wise maximization of the linear inequality in (6), the universal quantifier can be eliminated and the following condition is obtained:
maxw∈W
riw ≤ b − ridk, ∀i = {1, . . . nc} (7)
W = {w ∈ Rm
| w = Hkek, ek ∈ Ek} (8)
The ellipsoid Ek can be mapped into a unit ball ||zk||2 ≤ 1 by the change of variables according to zk = Q− 1
2k
ek . This yields:
W =
{
w ∈ Rm
∣
∣
∣
∣
∣
w = HkQ
12k
zk, ‖zk‖2 ≤ 1
}
(9)
The maximization problem (7) subject to (8) can be recast as follows [8]:
maxw∈W
riw = ‖riHkQ
12k
‖2 ≤ b − ridk (10)
Finally, the Euclidean norm in (10) can be expressed as LMI [10], resulting in:
(b − ridk)In riHkQ
12k
Q
12k
HTk
rTi
b − ridk
≥ 0 ∀i = {1, . . . , nc} (11)
Thus, (6) and (11) are identical and the proposition follows. Note that this results in nc LMI constraints. �
Introduction Problem Definition Approximation Method Example Conclusion Appendix 22