Embed Size (px)
Citation preview

Classification of Physiological Signals for Wheel Loader Operators Using Multi-Scale Entropy Analysis and Case-Based Reasoning
Shahina Begum1, Shaibal Barua1, Reno Filla2 and Mobyen Uddin Ahmed1,3
1 School of Innovation, Design and Engineering, Mälardalen University, Sweden {[email protected]}
2 Emerging Technologies, Advanced Engineering, Volvo Construction Equipment, Sweden {[email protected]}
3 Center for Applied Autonomous Sensor Systems, Örebro University, Sweden {[email protected]}
Abstract
Sensor signal fusion is becoming increasingly important in many areas including medical diagnosis and classification. Today, clinicians/experts often do the diagnosis of stress, sleepiness and tiredness on the basis of information collected from several physiological sensor signals. Since there are large individual variations when analyzing the sensor measurements and systems with single sensor could easily be vulnerable to uncertain noises/interferences in such domain multiple sensors could provide more robust and reliable decision. Therefore, this paper presents a classification approach i.e. MMSE-CBR that classifies physiological parameters of wheel loader operators by combining CBR approach with a data level fusion method named Multivariate Multiscale Entropy (MMSE). The MMSE algorithm supports complexity analysis of multivariate biological recordings by aggregating several sensor measurements e.g., Inter-beat-Interval (IBI) and Heart Rate (HR) from Electrocardiogram (ECG), Finger Temperature (FT), Skin Conductance (SC) and Respiration Rate (RR). Here, MMSE has been applied to extract features to formulate a case by fusing a number of physiological signals and the CBR approach is applied to classify the cases by retrieving most similar cases from the case library. Finally, the proposed approach i.e. MMSE-CBR has been evaluated with the data from professional drivers at Volvo Construction Equipment, Sweden. The results demonstrate that the proposed system that fuses information at data level could classify ‘stressed’ and ‘healthy’ subjects 83.33% correctly compare to an expert’s classification. Furthermore, with another data set the achieved accuracy (83.3%) indicates that it could also classify two different conditions ‘adapt’ (training) and ‘sharp’ (real-life driving) for the wheel loader operators. Thus, the new approach of MMSE-CBR could support in classification of operators and may be of interest to researchers developing systems based on information collected from different sensor sources.
KEYWORDS: SENSOR FUSION; CASE-BASED REASONING; MULT-SCALE ENTROPY ANALYSIS; PHYSIOLOGICAL SIGNALS; CLASSIFICATION
1. Introduction
Operating working machines in construction, mining, agriculture and forestry requires much mental and physical effort. The efficiency of these machines depends on the performance of the human operators/drivers. Monitoring and diagnosing the operators when they are exhausted with mental/physical workload is important feedback for an operator, especially a professional operator where an accident could have large consequences both on lives and economical costs. However, identification of mental/physical state and generating alarm due to stress, sleepiness, fatigue etc. is difficult while driving and still a scientific challenge. Today, different sensors enable clinician to determine psychological status with high accuracy. However, since there are large individual variations analyzing data from a single sensor source could deteriorate the classification result. Data that are collected from multiple sensor sources could provide us more reliable and robust information of these psychophysiological parameters. For instance if one sensor measurement is influenced by a certain noise or interference other sensor
measurements could still support the system. As human beings, we have the natural ability to fuse signals that are coming from different sources and supports in reliable and feature-rich judgment. Using multiple sensor signals to achieve more reliable assessment of diagnosis this is what (i.e., naturally performed multisensory data fusion) experts’ are doing in real life while diagnosing these psychophysiological parameters.
This paper investigates sensor signal fusion in a case-based classification scheme by means of MMSE algorithm [27][28]. Here, five sensor measurements i.e., Inter-beat-Interval (IBI) and Heart Rate (HR) from Electrocardiogram (ECG), Finger Temperature (FT), Skin Conductance (SC) and Respiration Rate (RR) HR, IBI signal from ECG, FT, SC and RR are combined at low-level fusion applying MMSE algorithm to classify physiological parameters stressed and healthy of wheel loader operators. The proposed system has been evaluated with the data collected from eighteen 18 wheel loader operators. The main goal is to investigate whether the proposed system MMSE-CBR is able to classify the operators despite large individual variations and noises/interferences of the environment.
The rest of the paper is organized as follows: Section 2 presents the background of physiological sensor signals

fusion. It also discusses about CBR and entropy analysis. Section 3, describes related work. Section 4, illustrates the study design for the data collection. In section 5, the methods are described in detail. The experimental work is presented in section 6. Section 7 discusses the evaluation results. Finally, Section 8 ends with concluding remarks.
2. Background
2.1 Sensor signal fusion
Sensor signal fusion is a method that gives us the resulting information while using multiple sensors. According to [31], “Sensor fusion is the combining of sensory data or data derived from sensory data such that the resulting information is in some sense better than would be possible when these sources were used individually.” Commonly, sensor signal fusion can be achieved either by combining multiple sensor data sources or data from a single source over a period of time could also take part in the fusion process. Signals can be fused or combined in three-level models [23]:
1) Low-level or Data level fusion combines raw (unprocessed) sensor data,
2) Intermediate-level or Feature level fusion combines the representative features extracted from sensor signals
3) High-level or Decision level fusion fuses findings (or detection probabilities) of multiple sensors.
Multi-sensor information fusion is the process of integrating data or information from multiple sensors to improve quality and accuracy of the information that cannot be obtained using the sources individually. The main advantage of using data/information from all available sources is that it helps to enhance the diagnostic visibility, increases diagnostic reliability and consequently reduces the number of diagnostic false alarms. Some of the traditional methods for sensor fusion are: Kalman filter [8], Weighted decision methods (voting techniques), Neural networks [9], Clustering algorithms [10], Bayesian inference [15], Dempster-Shafer’s methods [14]. Information fusion is available in the vehicle research in many cases for automatic vehicle control systems to increase reliability, efficiency and security [8][29][30][32]. However, to our knowledge, research on multi-sensor data fusion for monitoring or classifying drivers’ status is limited in the literature. Yet the greater the necessity of monitoring drivers using multiple physiological sensors in a reliable and autonomous fashion the more valuable the area of research would be.
2.2 Case-based reasoning
CBR is a methodology for problem solving and learning. According to Kolodner [38] “In case-based reasoning, a reasoner remembers previous situations similar to the current one and uses them to help solve the new problem”. So, learning from the past and solving new problems based on previously solved cases is the main approach of CBR. The first step in developing a CBR system is to formulate a case. These cases can be instances of things or a part of a
situation that we have experienced. The case comprises unique features to describe a problem. In CBR, past cases are stored in a case library or case base. A reasoning cycle of CBR with 4 Re-s: Retrieve, Reuse, Revise and Retain is commonly used to implement such a cognitive model [18]. 1) Retrieval it searches the case-library for cases similar to the problem description and retrieves the most similar cases. 2) Reuse it uses the solution of a previous case. However, usually the best matching case does not always provide a complete solution for a new problem case and therefore adaptation of the solution is often required to use it for a new case. This adaptation or change of the best matching cases usually complex and requires domain knowledge. 3) Revise the proposed solution from the reuse step is evaluated and if necessary repaired in the revise step. 4) Retain the confirmed solution is saved into the case library as learned case.
In reality, experts in diagnosing human behaviour i.e., stress, tiredness, drowsiness etc. rely heavily on their past memory to solve a new case. Knowledge elicitation is another problem in such domain, as human behaviour or our responses to these psychological parameters is not always predictable. Even an experienced clinician in this domain might have difficulty to articulate his knowledge explicitly. Sometimes experts make assumptions and predictions based on experiences or old cases. In CBR, this elicitation can be performed with the previous cases in the case base. Thus, CBR is especially suitable for instance for psychophysiological stress diagnosis when the domain is difficult to formalize and is empirical.
2.2 Entropy
Entropy and complexity measures have widely been applied for the analysis of time series signals. Entropy is introduced by Shannon [24] for information theory. It is considered as a generic measure of system disorganization and the basis of the concept connected to thermodynamics “Any macroscopic system which is in time t0 in given time-invariant outer conditions will reach after a relaxation time the so-called thermodynamic equilibrium. It is a state in which no macroscopic processes proceed and the state variables of the system gains constant time-invariant values.” While the system reaches at thermodynamic equilibrium the entropy of the system reaches its maximum. Later, in 1984 it has been applied to a power spectrum of a signal [25]. In signal processing, entropy shows the irregularity, complexity or unpredictability characteristics of a signal. The expected value of information contained in a message can be quantified by entropy. If X is a single discrete random variable than the entropy H(X) is measure of its average uncertainty. Entropy can be calculated using Equation (1)
( ) ( ) ( )∑=
−=n
iii xpxpXH
1log (1)
Where, X is the random variable with n outcomes that is and ( )ixp is the probability mass
function of . Equation (1) refers to Shannon Entropy.

Entropy has received much attention to quantify complexity of physiological signals in healthy and diseased systems. Healthy systems have greater adaptability and functionality than diseased systems. In many studies it has been found that disease, aging, drug toxicities degrade the physiologic information content and reduce adaptive capacity of the individual. Therefore, loss of complexity becomes a common feature in pathologic systems analysis [16] and it can be expressed by the condition that the complexity of healthy systems is greater than the complexity of pathologic systems.
A signal with sequentially generated random numbers has greater complexity and higher entropy value. The traditional entropy-based algorithms are used to quantify regularity of time series on a single scale, such algorithms are Shannon entropy, Kolmogorov-Sinai (KS) entropy, Approximate entropy and Sample entropy. Pincus has developed the Approximate Entropy (ApEn) which has widely been applied in clinical cardiovascular studies [26]. However, traditional entropy methods applied in the analysis of physiological or biological sensor signals support entropy estimation only on univariate/single channel data. Costa et al. [16] have proposed a Multiscale Entropy Analysis (MSE) and quantify measure of complexity. This complexity, when evaluated over larger scales, is small for both deterministic and uncorrelated random signals and large for correlated (linear and/or nonlinear) stochastic processes. Nevertheless, increase in entropy does not necessarily always associate with the increase in dynamical complexity [16]. Researchers observed that traditional single scale entropy estimate tends to yield lower entropy in time-series data than for their surrogate series data. Surrogate series data can be generated shuffling the original data. The shuffled data are more irregular and less predictable than the original data and correlation commonly encompasses several time scales. Thus, the surrogate data generating process destroys the correlation and degrades the information content of the original time series data. MSE which by discovering the dependency of entropy estimates on multiscale shows that original time series are more complex than their surrogates. Also, in the study [16] the authors have found that MSE strongly separates healthy and diseased groups.
The MMSE, which is an extension of MSE, supports entropy estimation of multivariate/multichannel data. Sample Entropy algorithm introduced by Richman et al. [26] is the basis of the MMSE algorithm. In our proposed system, for the data level fusion, MMSE algorithm is applied to measure complexity. A detailed description of MMSE algorithm is available in [27][28]. Multivariate sample entropy is a precondition for MMSE analysis. There are two main steps to calculate the MMSE:
1) Define temporal scales by averaging p-channel time series using the coarse graining method.
2) Evaluate multivariate sample entropy (MSampEn) for each coarse grained multivariate data.
3. Related work
Sensor data fusion is becoming an emerging technology. In the health sciences, synergy between CBR and other techniques is common [20][21][42][45][46][47][48]. Nevertheless, following are some of the few attempts that apply fusion techniques in the CBR systems. Case-based data fusion to improve clinical decision support in coronary heart disease is reported in [3]. The authors have proposed three different data fusion models: two models fuse information at the information retrieval-outcome level and the other combines data at the knowledge discovery input level. Performances of the proposed three-model framework for information fusion are compared with the single source model. Their study indicates that fusion of information at the retrieval outcome level outperforms the single source information. Policastro et al. [2] proposed a hybrid CBR system for monitoring water quality based on chemical and physical parameters and algae population. In the system, three Machine Learning algorithms are employed for the sensor signal fusion. The evaluation results indicate that the hybrid system improves the accuracy of the system. A case-based data fusion scheme is applied in the offshore wind energy mapping in [3]. Radar scatterometersa has low spatial resolution but have a sufficient representativeness to get wind observations. On the other hand, synthetic aperture radars have high spatial resolution but don’t have enough representativeness. Therefore, the low spatial resolution and high spatial resolution data sets from the both sources are fused together to get a more reliable assessment of wind resource. Fluid dynamics law and CBR provide additional information in the process. The fusion generates a wind resource mapping as a major outcome. Song et al. [4] fuse the retrieved cases by using the Dempster-Shaffer theory in the dose plan for prostate cancer in radiotherapy. Here, a single case might have different dose recommendations due to variety of uncertainties in decision-making in such cases multiple cases are fused to get a reliable dose plan for a new case. Thus, the author argued that this decision level fusion supports to reduce the conflicts among the oncologists for a specific case. A data fusion approach in the domain of business listings using CBR is described in [5]. The paper shows that combination of CBR, joint probability, and domain-specific rules improves the result significantly. In recent years, the area of sensor data fusion is evolving and researchers are applying new methods/techniques to introduce sensor fusion in various domains. Entropy estimation technique has been applied in sensor fusion for example in [11][12[13][22]. Besides, entropy estimation has widely been applied in clinical studies including biological signal processing [17], breast cancer diagnosis and EEG signal analysis of sleep stages [19].
4. Study design and data collection
Psychophysiological measurements of wheel loader operators have been collected in two phases; 1) during conducting a Psychophysiological Stress Profile (PSP) and 2) during operating a wheel loader. During the study each operator was given an exclusive 2.5 hours session, starting

with the Psychophysiological Stress Profile (PSP) described in subsection 4.1. Afterwards, the machine testing was performed, with the traction force setting as the independent variable. In order to minimise the skewing influence of learning effects, each operator was given ten minutes’ self-training (called “adapt”) to familiarise himself with the specific characteristics of the current machine setup before five minutes of live test-driving (called “sharp”).
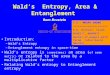
(a) Right hand controls
(b) Left hand controls
Fig. 1. Sensor placement on both a) right and b) left wrists and fingers and in the nose [34]
Altogether, eighteen people have been participated as
test operators in this study – all male, mostly in order to exclude possible skewing due to gender differences. The operators were pre-selected according to our preliminary judgment of their wheel loader operating skills, ranging from professional experts to less experienced operators. In our study the psychophysiological measurements were conducted using the cStress software from PBM Stressmedicine Systems, running on a second laptop installed in the cab of the wheel loader. FT, HR (via ECG) and SC were acquired using a C2 physiological monitoring system from J&J Engineering and a LifeSense AirPas oxycapnograph handled data acquisition and pre-analysis of the operator’s respiration. The ECG sensors were placed on both wrists (see Fig. 1(a) and Fig. 1(b)), using isotonic gel. These sensors needed to be secured against relative movement in order to avoid data artefacts. Reliable data could be acquired when using the suspended chair’s integrated arm rests to support the operator’s lower arms, despite the operator in a wheel loader cab otherwise being exposed to vibrations and accelerations of various frequencies and magnitudes.
4.1. Using Psychophysiological Stress Profile (PSP) approach
Each human being has an individual response to workload, which necessitates a specific reference or calibration in order to be able to correctly evaluate the results of psychophysio-logical measurements. While not common procedure in the research community, establishing a PSP has proven to be valuable in clinical work in patients with stress-related dys-functions.
The PSP shown in Table 1 is essentially taken from [35] and has been implemented in the cStress software. It contains 15 minutes of data recording, guiding the patient (or in our case the wheel loader operator) through six steps.
Table 1. Psychophysiological Stress Profile (PSP)
# Designation Observation time
Description
1 Base line 3 min Relaxed silent reading of a neutral text
2 Deep breathing
2 min Deep breathing under guidance, approx. 6 bpm
3 Nonverbal stress
2+2 min Two periods of thinking about a stressful situation, feedback and guidance in between
4 Relaxing 2 min Relaxing with closed eyes, normal breathing
5 Math stress 2 min Counting aloud backwards from 2500 in steps of 7
6 Relaxing 2 min Relaxing with closed eyes, normal breathing
4.2. Using training and testing wheel loader
The measurements used in our research were conducted on operators of a wheel loader performing bucket loading of gravel. This is a very typical application for such a working machine with a cycle time of 25-35 seconds, depending on working place setup and how aggressively the operator uses the machine. A significant amount of training is required for operators to use a wheel loader efficiently. Even for experienced professionals operating such a working machine for several hours is exhaustive, as it involves both physical and mental workload. Even though the operator sits still and the controls do not demand a large amount of power the operator has to actively control the system all the time and maintain situational awareness.
In this study we have focused specifically on the bucket filling phase. Here the challenge for the operator is to balance traction force on the wheels and bucket forces from the hydraulic lift and tilt functions and coordinate the motions in order to fill the bucket fast and efficiently. A detailed description of wheel loader working cycles, together with the challenges they present for machine and operator, can be found in [34]. In order to increase the effect of these challenges the wheel loader’s control software was modified to limit engine speed, and thus traction force, during bucket filling.
In the most severe modification, engine speed was limited so that maximum traction force was reduced to 47%, which is below what was needed for the working task to be

performed efficiently. Any operator should have experienced this as clearly negative, with hypothetically a higher workload as a result.
In the moderate scenario, traction force was limited to 62%, which is comparable to what expert operators required on average for this particular working task. It should have been hardly noticeable for an expert, but does provide advantages such as prevention of wheel spin to less experienced operators.
The technical aspects are described in more detail in [33]. In both conditions, 47% and 62% setup, the counteracting effect of the traction force is clearly less pronounced so that even at maximum use of the traction force available the lifting force is never cancelled out completely. This should be experienced positively, especially by less experienced operators (but the question is whether this positive aspect outweighs the artificial limitation of maximum available traction force).
During all testing sessions various machine data were also recorded off the wheel loader’s CAN bus, enhanced by additional data, either calculated or acquired from externally mounted sensors. All tests were also recorded on video using an externally placed digital video camera and later synchronised with the acquired data from the CAN bus and the psychophysiological measurements.
5. Methods
The methods are presented in two-folds, 1) presents the proposed approach i.e. MMSE-CBR and 2) other traditional CBR approaches.
5.1. The proposed approach (MMSE-CBR)
In order to perform classification of physiological signals for wheel loader operators, the proposed approach combines MMSE and CBR. Here, the MMSE helps to perform a signal level fusion and the CBR approach supports in classification by retrieving most similar cases. A case is formulated with a feature vector and features are extracted by applying MMSE where the algorithm fuses a number of sensor signals. The steps in the proposed system are presented in Fig 2.
In the proposed system, MMSE algorithm is applied on five sensor signal measurements (i.e., HR, IBI, FT, SC and RR) to quantify complexity of the sensor signals. So, the sensor signals are sensing from the operators as presented in Step1. In Step2 a pre-processing is done on each sensor signal before the signals are fused by the MMSE algorithm and the preprocessing of data is discussed in 5.1.1.Step3 runs the MMSE algorithm and it considered a scale factor up to 10 levels. Step4 and Step5 are used to extract features and formulate a case for CBR approach. The description of MMSE, feature extraction and case formulation are presented in section 5.1.2. Finally, Step6 is the CBR classification, here case similarity is calculated and based on similarity value the most similar case is retrieved. The solution of the retrieved case is considered as classification for the new case, the details of case similarity and retrieval are presented in 5.1.3.
5.1.1 Data pre-processing
Before feature extraction to handle artifacts we have applied the k-nearest neighbors (K-NN) based interpolation algorithm described in [40] in the data sets to handle artifacts. This algorithm works in two steps: first it detects artifacts from the signal which is done mainly based on the windowing technique and in the second step interpolation is performed using K-NN algorithm to replace artifacts from the signal.
In the proposed CBR system, in PSP data set, each case consists of 10 features extracted from the 15 minutes signal recordings. An expert has classified all the reference cases. The 15 minutes recoding contains six sessions data which are baseline, deep breathing, verbal stress, relax, math stress and relax [35]. As the scale factor in MMSE depends on the length of data set (changes become significant for a large datasets) for a reliable estimation we have considered the whole 15 minutes recording instead of taking session-by-session data.
In the training and testing wheel loader i.e., sharp and adapt phases, for each case there are three data sets (for three different traction force settings). The adapt data set consists of three 10 minutes recoding and sharp data set contains three 5 minutes recoding. For each sharp and adapt cases, to extract features the three data sets are combined. Now, the
O P A R A T O R
O R
U S E R
Step1: Sensor signals
FT IBI HR RR SC
Step2: Pre-processing
The signals are processed to be equal in length and cleaned by using a k-NN
based artefact handling algorithm.
Step3: Sensor fusion
A data level fusion has been conducted using MMSE algorithm where 10 factor
scales is considered.
Step4: Feature extraction
Output from the MMSE algorithm provided a feature vector with 10
entropy values as features.
Step5: Case formulation
A new problem case is formulated considering extracted features by
MMSE algorithm.
Step6: CBR classification
A most similar previous case is retrieved & the classification of the
previous case is considered.
Sensing 5 signals
User is notified about the
classification
Fig. 2. Steps of the proposed MMSE-CBR classification system

adapt data set has total recoding length of 30 minutes and sharp has 15 minutes recording.
For the comparative study, we need data with same length. Therefore, the adept’s signal recording length is downsized to 15 minutes to make it same as sharp. In adapt, each recording length is 10 minutes. This 10 minutes data set is then divided into two 5 minutes and finally, mean of the two 5 minutes recording has been calculated for each subject’s recording. Thus, there is 15 minutes data set for adapt cases to extract features using MMSE analysis. Like the PSP data set, for the sharp and adapt data sets, features are extracted up to the scale factor 10.
5.1.2 Feature extraction and case formulation based on MMSE
In the MMSE analysis, the first step is to define temporal scales by averaging p-channel time series using the coarse graining method (see Equation 3) and then in the second step, evaluate MSampEn for each coarse grained multivariate data. To calculate MSampEn the algorithm forms a composite delay vector from the coarse grained data and it’s two important embedding parameters are mk and τk. A detail description is available in [27][28].
In this study, for MMSE analysis, we consider the embedding vector parameters, mk=2 and τk=1. The coarse-grained process is obtained by the following Equation (2)
( ) εεε
εε Njwhereab j
ji ikjk ≤≤= ∑ +−=11
11 ,, (2)
Where, N is number of data points in every channel, { } pka N
iik ........2,11, ==
, is a p-varieties time series, 𝛆𝛆 is the
scale factor, k =1,….,p is the channel index and εjkb , is the
coarse-grained data. The MMSE analysis returns a linear vector based on the
scale factor. To calculate MSampEn, for each p-variate time series a composite delay vector has been constructed using Equation (3)
( ) ( )
( ) ( ) ppp mipipipmi
iimiiim
aaaa
aaaaaia
τττ
τττ
1,,,1,2
,2,21,1,1,1
,,,,,
,,,,,,
22
2111
−++−+
+−++=
2222
22 (3)
Where M = [m1, m2, m3,….,mp] ∈ Rp is the embedding vector, = [ 1, 2,…… p] the time lag vector and composite delay vector ( ) m
m Ria ∈ , where ∑ ==
p
k kmm1
Estimate of MSampEn is presented in Equation (4)
( ) ( )( )
−=
+
rBrBNrMMSampEn m
m 1
ln,,,τ (4)
Where M is embedding vector, is time lag vector, r is threshold and N is multivariate time series Bm and Bm+1 are the frequency of occurrence for the length m and m+1 respectively. The scale factor is highly dependent on the length of data. However, the MMSE estimates are consistence for data length N ≥ 300 [27]. Here, for the croase-grained process the scale factor is considered 10 because of at the scale 10 the
shortest data series has greater than 300 data points. An example of the coarse-grained process up to scale factor 2 is shown in Fig. 3. As we measure MMSE for scale factor up to 10 it returns a vector of length 10 as a result of MMSE estimation for each recording. Thus, these 10 values are considered as the features for each recording.
Fig. 3. Illustration of coarse-grained process in MMSE for scale
factor 2
5.1.3 Similarity matching and case-based retrieval
In the proposed system, the similarity of a feature between two cases was measured using modified Euclidean distance and fuzzy similarity. However, the experimental work has been conducted using fuzzy similarity function. The modified Euclidean distance function to calculate similarity of a feature between two cases is shown in Equation (5),
(5)
Where, Ti and Si are feature values of the target and source cases respectively. The function returns 1 if the values are same and returns 0 if the values are completely dissimilar. In fuzzy similarity, a triangular membership function (mf) replaces a crisp value of the features for new and old cases with a membership grade of 1. In both the cases, the width of the membership function is fuzzified by 50% in each side. Fuzzy intersection is employed between the two fuzzy sets to get a new fuzzy set which represents the overlapping area between them.
(6)
The similarity between feature values of the old case (Sf) and the new case (Tf) is now calculated using Equation (6) where m1, m2 and om is the area of each fuzzy set [36].
The similarity between two cases is measured using the average of all the features that are to be considered. The function for calculating the similarity between two cases is presented in Equation 7.
),(*),(1
ff
n
ff STsimwSTSimilarity ∑
=
= (7)
Where T is a current/target case, S is a stored case in the case base, n is the number of the attributes/features in each case, i is the index for an individual attribute/feature and sim (Ti, Si) is the local similarity function for attribute i in cases T and S. It is noted that here for all the extracted features weight values are equal.
5.2. Traditional CBR approaches
In the CBR system for single data source, the features are extracted considering each of the signal (i.e., IBI, FT, SC

and RR). From the IBI signal, Heart rate variability (HRV) analysis is considered and features are extracted in both time and frequency domains. Here, statistical analysis and Fast Fourier Transformation are considered and the feature extraction process is presented in our previous study in [39]. Similarly, features for RR are also obtained in both time and frequency domains. In time domain, a mean respiration rate is calculated as feature. Also a Dominant respiration frequency (DRF) [41] analysis has been considered in the frequency domain for the feature extraction. In order to extract features from FT and SC, a derivative of each step i.e. “degree of changes” is introduced as a measurement [36]. The difference between FT and SC is that when FT increases than SC decreases and vice versa. Therefore, the SC features are also calculated using the same method as FT. For CBR classification, each signal is classified separately by considering fuzzy similarity as local similarity and k-NN as global similarity as discussed earlier.
However, the CBR approach for multi-source signal two fusion methods (i.e. considering maximum similarity known as voting techniques and weighted average similarity) are considered at the decision level. For a given case, 1st a similarity value for each signal source is calculated separately and then fusion method is applied as a 2nd level similarity calculation. The method maximum similarity provides the maximum similarity value among the four similarity values. The function is expressed as in Equation (8).
sim S = max(α, β, γ , δ) (8)
Here, considering a target case T and the stored case S, the similarity values of HRV, FT, SC and RR features are α, β, γ and δ respectively obtained from the CBR classification. Similarly, for the method weighted average, some weights have been considered between scale 1 to 10 for each individual similarity value of HRV, FT, SC and RR based on the individual classification accuracy rate presented in the evaluation section. The weighted average method can be expressed by the Equation (9).
(9)
Here, w is the weights, multiplied with associated similarity value and sum of the multiplied similarity values are divided by the sum of weights. In the both methods, the new similarity value is used in the final CBR retrieval for classification.
6. Evaluation
The classification accuracy has been evaluated considering the 2 data sets as discussed earlier; 1) PSP data set and 2) training and testing wheel loader data set i.e., sharp and adapt. An evaluation of CBR system classification integrating sensor fusion (MMSE-CBR) has been conducted using each data set. Finally, the proposed approach is
compared with other single source system and fusion methods i.e. 3) MMSE-CBR and other single source parameters and fusions. Note that, only PSP data have been classified by an expert as in stressed and healthy classes. The training and testing wheel loader data set have not been classified by the expert. However, the data are controlled and separated by training and testing conditions.
6.1 . Using the PSP data set
Here, the experimental work has been conducted in two folds; a) observation of the MMSE analysis and b) observation of the MMSE-CBR classification.
a) Observation of MMSE analysis: In the experimental work, all the 5 sensor signals are fused and computed the entropy complexity up to scale factor 10. An average of entropy complexity value for each scale factor is calculated both for the stress and healthy cases. Fig. 4 shows the average of MMSE analysis for 7 healthy and 11 stressed cases (classified by an expert) [37].
Fig. 4. Average of MMSE analysis and error bars the standard
deviation for 7 healthy and 11 stressed cases
As can be seen from the figure, stressed cases possess a lower complexity value than the healthy cases. However, it is not always true for individual recordings. Fig. 4 showed the MMSE analysis results for the 18 cases and it can be seen that MMSE varies a lot depending on individuals. This shows clearly the necessary and motivation of applying CBR approach since the CBR can work well when there is a large variation in the cases.

Fig. 5. MMSE analysis for 18 cases
b) Observation of MMSE-CBR classification: The main goal of this experimental work is to see the classification accuracy of the MMSE-CBR approach compare to the expert. Here, the experimental work has been carried out with 18 cases where 7 of them are classified as ‘healthy’ and 11 of them are classified as ‘stressed’ by an expert. For the the evaluation, the retrieved top 2 most similar cases are considered i.e., if both the query and one of the two retrieved cases are belongs to a similar class then the number of correctly classification of cases is counted as 1. In Fig.4 the weight values for all extracted features are set as follows: 1 for scale 1, scale 2 and scale 4; 8 for scale 3 and scale 9; 10 for scale 5, scale 6, scale 8 and scale 10; and 5 for scale 7. Two similarity functions Euclidian distance and Fuzzy similarity functions are applied for the case matching. The comparison results of these two similarity methods are presented in detailed in previous paper [22]. It has been observed from the result in [22], the CBR approach performs better classification while considering fuzzy similarity function. Table 2 depicts the summary results of the classification accuracy by MMSE-CBR considering the fuzzy similarity function.
Table 2. Percentage of correctly classified cases by MMSE-CBR considering fuzzy similarity function and PSP data
Case classes MMSE-
CBR 11 stressed cases 100.0% 7 healthy cases 57.10% Total on 18 cases 83.33%
In Table 2, the results of MMSE-CBR considering
fuzzy similarity function achieved 100% for stressed cases,
≈ 57% for healthy cases and in total the accuracy reaches ≈ 83%.
6.2 . Using training and testing wheel loader data set
This experimental work has been carried out same as previous experiment considering a) observation of the MMSE analysis and b) observation of the MMSE-CBR classification. The only difference is that here the expert does not classify the cases rather they are divided into two classes; sharp and adapt according to the condition in the data collection.
a) Observation of MMSE analysis: In this experiment, 3 sharp measurements (i.e. using 47%, 62% and 100% traction force) are combined to get one 15 minutes length sharp case for each subject. Again, one 15 minutes length adapt case for each subject is produced as discussed earlier in (section 5.1.1). Then, all the 5 sensor signals for each adapt and sharp data are fused and computed the entropy complexity up to scale factor 10. An average of entropy complexity value of each scale factor has been calculated both for adapt and sharp cases. The results for the MMSE analysis together with error bar considering adapt and sharp cases are presented in Fig. 6.
Fig. 6. Average of MMSE analysis and error bars the standard
deviation for adapt and sharp conditions As can been seen in Fig. 6, the MMSE algorithm can
fairly distinguish between sharp and adapt cases while considering the average entropy complexity value. Moreover, it shows that the complexity value is higher in adapt cases and comparatively lower in sharp cases. The contextual information is that during adapt condition the operators are getting training and during sharp condition they were in real life testing. However, this result is not true if the analysis is done within subjects. Such analysis observation is presented in Fig. 7.

As can be seen from Fig. 7, the multivariate sample
entropy values for scale factor 10 varies for adapt and sharp for most of the subjects and the entropy values of adapt measurements for 13 subjects out of 18 are higher than sharp measurements. According to the individual subjects entropy value, the sharp and adapt shows totally different for most of the cases. b) Observation of MMSE-CBR classification: The main goal of this experimental work is to see the classification accuracy of the MMSE-CBR approach i.e. how accurate the MMSE-CBR approach can distinguish the cases between sharp and adapt. Here, 18 sharp + 18 adapt =36 total cases is considered and same as previous experiment retrieved top 2 most similar cases and fuzzy similarity function in MMSE-CBR have been considered. The weight values for
all the extracted features between the scale factor 1 and 7 are set to 1. However, the weight value was higher for the scale factor between 7 and 10, i.e. the scale factor 8 is set as 8 and scale factor 9 and 10 are set as 10. The summary of the results are presented in Table 3.
Table 3. Percentages of correctly classified cases by MMSE-CBR considering fuzzy similarity function and adapt/sharp data
Case classes MMSE-
CBR 18 adapt cases 77.78% 18 sharp cases 94.40% Total 36 cases 83.3%
Fig. 7. Individual subjects’ MMSE analysis result for adapt and sharp condition

It can be seen from Table 3, considering top two similar cases, ≈ 78% of adapt cases are correctly classified as adapt and ≈ 94% of sharp cases are correctly classified as sharp. In total i.e. out of 36 cases, the percentage of correctly classified cases is achieved around ≈ 83% for both the conditions.
6.3 . MMSE-CBR and other single source parameters and fusions
This experiment aims for comparison of the proposed method and the other approaches. For example, CBR is used in the classification either considering a single source measurement i.e. finger temperature or multiple source measurement with maximum or weighted average similarity functions discussed earlier in 5.2. Here, again the experiment compares the proposed approach MMSE-CBR considering the two data sets i.e. a) PSP data set and b) training and testing wheel loader data set
a) Using Psychophysiological Stress Profile (PSP) data set In PSP, 18 driver’s data have been classified in two
classes (i.e. stressed and healthy) by an expert. At first, the CBR with fuzzy similarity function has been for classification on each single parameter i.e. FT, HRV, SC and RR. The classification accuracy has been summarized in Table 4.
Table 4. Classification accuracy on PSP data (i.e. stressed/healthy) considering CBR with single parameter vs MMSE-CBR. Here, HRV=Heart Rate Variability, FT=Finger Temperature, RR=Respiration Rate and SC=Skin Conductance.
Case classes CBR with HRV
CBR with FT
CBR with RR
CBR with SC
MMSE-CBR
11 stressed cases 100.0% 90.90% 81.81% 100.0% 100.0% 7 health cases 57.10% 71.4% 85.7% 42.8% 57.10% Total 18 cases 83.33% 83.33% 83.33% 77.77% 83.33%
As Table 4 presents, MMSE-CBR, CBR with HRV,
CBR with FT and CBR with RR have the same classification accuracy i.e. ≈ 83% for total 18 cases. However, the classification accuracy is low for all of them while considering the healthy cases. Nevertheless, the classification accuracy is 100% for most of them while considering stressed cases.
Table 5. Comparison results of correctly classified cases using MMSE-CBR and other fusion approaches on PSP data i.e. stressed/healthy. Here, ‘MAX Similarity’ considers maximum similarity value, ‘WA Similarity’ considers weighted average of all the similarity values.
Case classes CBR (MAX
Similarity)
CBR (WA
Similarity)
MMSE-CBR
11 stressed cases 72.22% 100.0% 100.0% 7 health cases 85.7% 42.8% 57.10% Total 18 cases 77.77% 77.77% 83.33% It can be seen from Table 5, both for the CBR with
maximum similarity and weighted similarity, the
classification accuracy is achieved ≈ 78% whereas using the proposed approach the classification accuracy is achieved ≈ 83%. Nevertheless, the classification accuracy in healthy class is relatively lower for all the CBR systems and better for the stressed class. Here, MMSE-CBR and CBR with weighted similarity have achieved 100% classification accuracy.
b) Using training and testing wheel loader data set i.e. sharp and adapt. Same as the above experiment, this also evaluates the
proposed MMSE-CBR method with other CBR approaches, for example, CBR system with HRV. Table 6 presents the classification accuracy in percentage considering both single source sensor measurements in CBR and multiple sensor sources in MMSE-CBR.
Table 6. Classification accuracy for adapt/sharp data considering CBR with single source measurement vs MMSE-CBR. Here, HRV=Heart Rate Variability, FT=Finger Temperature, RR=Respiration Rate and SC=Skin Conductance.
Case classes CBR with HRV
CBR with FT
CBR with RR
CBR with SC
MMSE-CBR
18 adapt cases 77.7% 88.8% 66.6% 83.3% 77.7% 18 sharp cases 77.7% 55.5% 72.2% 50.0% 94.4% Total 36 cases 77.7% 72.2% 69.4% 66.6% 83.3%
It can be seen from Table 6, considering the all 36 cases,
MMSE-CBR is achieved ≈ 83% classification accuracy and CBR with HRV is achieved ≈ 78%. However, for the sharp cases, MMSE-CBR has achieved it’s accuracy as ≈ 94%. In addition, the others i.e. CBR with FT, CBR with RR and CBR with SC have shown comparatively lower classification accuracy. Nevertheless, MMSE-CBR approach shows better performance in terms of classification accuracy against the other CBR decision fusion methods i.e. CBR with maximum similarity and CBR with weighted average similarity at decision or high-level. For the both decision fusion methods, the achieved percentage of correctly classified cases is 72% and 83% for MMSE-CBR as presented in Table 7.
Table 7. Comparison results of correctly classified cases using MMSE-CBR and other fusion approaches on adapt/sharp data. Here, MAX Similarity=considers maximum similarity value, WA Similarity=considers weighted average of all the similarity values.
Case classes CBR (MAX
Similarity)
CBR (WA
Similarity)
MMSE-CBR
18 adapt cases 66.66% 88.88% 77.7% 18 sharp cases 77.77% 55.55% 94.4% Total 36 cases 72.22% 72.22% 83.3%
7. Experimental results and discussions
As discussed in the previous section several experimental works have been carried out to evaluate the performance of the proposed system that employs sensor fusion method in a

case-based classification system for the wheel loader operators. Since, in reality clinicians make decision based on effectively fusing the information collected from different physiological sensor sources the main goal was to investigate whether in such classification systems it could also classify the operators correctly while combining information from different sources.
In the proposed system, the MMSE algorithm used for sensor signal fusion was able to discriminate between stressed and healthy subjects. Fig.4 shows a better separation of MMSE curves for stressed and healthy subjects. Further, when assessing the relative complexity of stressed and healthy subjects it indicates that the complexity index (area under the MSE curve) is lower for stressed subjects than for the healthy subjects. This supports the multiscale complexity loss theory with aging and disease or when a system is under constraints [44]. The MMSE analysis on individual subjects (see Fig. 5) reveals that the individual variation is higher and the underlying complexity analysis does not explicitly distinguish the separation. However, data level sensor fusion using MMSE in the proposed CBR system provides individual classification with an average accuracy of 83% compare to an expert’s classification. The accuracy is significantly higher (100%) for stressed subjects than for healthy (57%) subjects. This could be due to limited number (7) of available healthy cases into the system that reduces the probability of retrieving healthy cases. The evaluation results using another set of data which were not classified by expert rather than taken from a controlled study [34] demonstrate that MMSE distinguishes the ‘sharp’ and ‘adapt’ cases and error bars in Fig 6 explain this separation more efficiently. It also reveals that ‘sharp’ (real life driving) exhibits lower complexity than ‘adapt’ (training). MMSE analysis for individual subjects in Fig. 7 illustrates that in scale factor 10 multivariate sample entropy values varies for most of the subjects and the complexity is higher for adapt (training) cases for most of the subjects (13 out of 18 subjects). The proposed CBR classification system using sensor fusion classifies the cases with 83.3% accuracy where 94.4% correctness has been achieved for sharp cases.
Yet, another study has been conducted to evaluate performance of the system by using sensor fusing process compare to the measurements of the individual sensor sources. It can be observed that the proposed multi-sensor fusion approach in CBR (MMSE-CBR) performs at least as well as or better than the best single sensor (see Table 4 and Table 6). In addition, two methods (section 5.2) namely maximum similarity and weighted average allow higher-level or decision level fusion which has also been tested in the CBR system. Table 5 and Table 7 depict that among the three approaches the proposed low or data level multi-sensor fusion approach in CBR (MMSE-CBR) out performs the others.
8. Summary and conclusions
This paper presented a new approach for multi-sensor fusion in a CBR system for classification of wheel loader operators based on 5 sensor measurements i.e., IBI, HR, FT, SC and RR. Multivariate and mult-scale entropy was applied to perform a low level or data level sensor fusion in the system. In the proposed system, the features extracted from the entropy estimation were used to formulate cases in a CBR system. The result shows that the system could classify ‘stressed’ and ‘healthy’ subjects 83.33% correctly compare to an expert’s classification. Moreover, in another study the achieved accuracy (83.3%) indicated that it could also classify two different conditions ‘adapt’ (training) and ‘sharp’ (real-life driving) for the wheel loader operators. Even though we have observed that sensor fusion process provided better or same classification accuracy than the best individual signal source we could expect a number of benefits over single source systems. Being able to cover the same domain with different sensor measurements the fusion process in such domain could provide more reliable decision and increase diagnosis confidence. So, the system described here could yield significant benefit in applying decision support is such domain for monitoring operators and could provide a good means for sensor signal fusion in other health care domains.
Acknowledgments
The authors would like to acknowledge the Swedish Knowledge Foundation (KKs) and Volvo Construction Equipment AB, Sweden for their support of this research.
References
[1] Azuaje F, Dubitzky W, Black N, Adamson K. Improving clinical decision support through case-based data fusion, IEEE Transactions on Biomedical Engineering, Volume 46, Nr.10, pp.1181-1185, 1999.
[2] Policastro C.A. and CarvalhoA.C.P., Applying Case Based Based Reasoning to Sensor Fusion. Intelligent Sensors, Sensor Networks and Information, 2007. ISSNIP 2007. 3rd International Conference on, pp.419-424, 2007.
[3] Ben Ticha M. B. And Ranchin T.A case based reasoning data fusion scheme: applicationto offshore wind energy resource mapping, The 9th International Conference on Information Fusion, Florence, Italy 2006
[4] Song, X., Petrovic, S., Sundar, S. “A Case-Based Reasoning Approach to Dose Planning in Radiotherapy”, in D.Wilson, D.Khemani (Eds.) Workshop Proceedings, The Seventh International Conference on Case-Based Reasoning ICCBR'07, Belfast, Northern Ireland, August 13-16, 2007, pp. 348-357.
[5] Sood S. and Kat P. Business Listing Classification Using Case Based Reasoning and Joint Probability, AAAI Spring Symposium, Technical Report SS-11-08, USA, March 2011
[6] Kim J. and Andre E. Fusion of multi-channel biosignals towards automatic emotion recognition.
[7] Hall D.L. LLinas J., An introduction to multisensory data fusion. Proceedings of the IEEE, Vol. 85, No. 1, January 1997
[8] RodgerJ.A., Toward reducing failure risk in an integrated vehicle health maintenance system: A fuzzy multi-sensor data fusion Kalman filter approach for IVHMS, Expert Systems with Applications, Volume 39, Issue 10, August 2012, Pages 9821–9836

[9] Ataei S., AghakouchakA.A., Marefat M.S., and Mohammadzadeh M.,Sensor fusion of a railway bridge load test using neural networks, Expert Systems with Applications, Volume 29, Issue 3, October 2005, Pages 678-683
[10] Wang X., Wang S. and Jiang A., A Novel Framework for Cluster-based Sensor Fusion, Multiconferenceon Computational Engineering in Systems Applications, IMACS 2033 – 2038, 2006
[11] Zhou Y. and Leung, H., Minimum entropy approach for multisensor data fusion, Proceedings of the IEEE Signal Processing Workshop, 1997, 336 - 339
[12] Grbovic M., Li W., Xu P., UsadiA.K., Song L. and Vucetic S., Decentralized fault detection and diagnosis via sparse PCA based decomposition and Maximum Entropy decision fusion, In Journal of Process Control. April 2012 22(4):738-750
[13] Noonan, C.A. Orford, K.J. Entropy measures of multi-sensor fusion performance, IEE Colloquium on Target Tracking and Data Fusion. Nov 1996
[14] Murphy R.R. ,Dempster-Shafer theory for sensor fusion in autonomous mobile robots, IEEE Transactions on Robotics and Automation, Apr 1998, pp.197 - 206
[15] Cou C. Fraichard Th. , Bessiere P. and Mazer, E. Multi-sensor data fusion using Bayesian programming : an automotive application, IEEE International Conference on Intelligent Robots and Systems, 2002. , 2002, 141 - 146 vol.1
[16] Costa M., Goldberger A.L., PengC.K., Multiscale entropy analysis of complex physiologic time series. Physical Review Letters, Volume 89, Nr 6, 2002.
[17] Costa M., Goldberger A.L., PengC.K., Multiscale entropy analysis of biological signals. Physical Review Letters, Volume 71, Nr 2, 2005.
[18] Aamodt A. and Plaza E., Case-based reasoning: Foundational issues, methodological variations, and system approaches, AICom - Artificial Intelligence Communications, IOS Press, Volume 7, Issue 1, pp 39-59, 1994.
[19] Wang Y. and Wang W. Liu Y., Wang D., Liu B., Shi Y. and Gao P., Feature Extracting of Weak Signal in Real-Time Sleeping EEG with Approximate Entropy and Bispectrum Analysis, Bioinformatics and Biomedical Engineering, 2009. ICBBE 2009. 3rd International Conference on, pp.1-4, 2009.
[20] Marling C., Wiley M., Cooper T., Bunescu R., Shubrook J. and Schwartz F., The 4 diabetes support system: A case study in CBR research and development, International Conference on Case-Based Reasoning, ICCBR’11, pp 137-150, 2011.
[21] Bichindaritz I., Prototypical Case Mining from Medical Literature, In Applied Intelligence, vol. 28, Issue 3, 2007, pp. 222-237.
[22] Begum S., Ahmed M.U., and Barua S. , Multi-Scale Entropy Analysis and Case-Based Reasoning to Classify Physiological Sensor Signals, workshop on CBR in the Health Sciences at 20th International Conference on Case-Based Reasoning, ICCBR12, Springer, Lyon, France , Editor(s):Isabelle B, Stefania M and Cindy M , September, 2012
[23] Cremer F., Schutte K., Schavemaker J. G. M., and Breejen E. A Comparison of decision-level sensor-fusion methods for anti-personnel landmine detection, Information Fusion, Volume 2, Issue 3, pp 187-208, 2001.
[24] Shannon CE, Weaver W. The mathematical theory of communication. United States: University of Illinois Press; 1975
[25] Johnson RW, Shore JE. Which is the better entropy expressionfor speech processing: -S log S or log S? IEEE Trans Acoust. 1984; ASSP-32: 129—37.
[26] Richman, J. S. and J. R. Moorman, Physiological time series analysis using approximate entropy and sample entropy, American Journal of Physiology-Heart and Circulatory Physiology,Volume 278, Nr 6, 2000.
[27] Ahmed M. U. and Mandic D.P., Multivariate Multiscale Entropy Analysis, IEEE Signal Processing Letters, Volume 19, Nr 2, pp.91-94, 2012
[28] Ahmed M. U. and Mandic D. P., Multivariate multiscale entropy: A tool for complexity analysis of multichannel data, Physical Review E, Volume 84, Nr 6, pp 061918-1 – 061918-10, 2011
[29] Mirabadi, A. Mort, N. ; Schmid, F. Application of sensor fusion to railway systems, Multisensor Fusion and Integration for Intelligent Systems, 1996. IEEE/SICE/RSJ International Conference on, Dec 1996, 185 - 192
[30] Smith, C.E.; Brandt, S.A.; Papanikolopoulos, N.P.Vision sensing for intelligent vehicle and highwaysystems IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, 1994 , 784 - 791
[31] Wilfried E. An Introduction to Sensor Fusion, Research Report 47/200, http://www.vmars.tuwien.ac.at/documents/intern/805/elmenreich_sensorfusionintro.pdf
[32] Lee B. and Chung W.Y. Monitoring the drivers using multiple physiological sensors, IEEE sensors journal, vol. 12, no. 7, july 2012
[33] Filla, R. (2012) “Study of a Method for Assessing Operability of Working Machines in Physical and Virtual Testing”. International Journal of Vehicle Systems Modelling and Testing, vol. 7, no. 3, pp. 209-234, 2012.
[34] Filla, R. (2011) Quantifying Operability of Working machines. Doctoral thesis, Department of Management and Engineering, Linköping University, Linköping, Sweden.
[35] Begum S., Ahmed M.U., Funk P., Xiong N. and Scheele B. V., Using calibration and fuzzification of cases for improved diagnosis and treatment of stress, The Proceedings of the 8th European Workshop on Case-based Reasoning, pp 113-122, 2006.
[36] Begum S., Ahmed M.U., Funk P., Xiong N. and Schéele B.V, A case-based decision support system for individual stress diagnosis using fuzzy similarity matching, Computational Intelligence, Blackwell Publishing, Volume 25, Nr 3, pp 180-195, 2009.
[37] Begum S., Ahmed M. U., Funk P., Filla R., Driver’s Mental State Monitoring System Using CBR Based on Heart Rate Variability Analysis, 7th International Symposium Advances in Artificial Intelligence and Applications (AAIA'12), September, 2012
[38] Kolodner, J. L. (1983b) Reconstructive Memory: A Computer Model. Cognitive Science, Vol. 7, Issue 4 pp. 281-28.
[39] Begum S., Ahmed M. U., Funk P., ECG Sensor Signal Analysis to Represent Cases in a Case-based Stress Diagnosis System, 10th IEEE International Conference on Information Technology and Applications in Biomedicine (ITAB 2010), p 193-198, Corfu, Greece, November, 2010.
[40] Begum S., Islam M.S., Ahmed M.U., and Funk P., K-NN Based Interpolation to Handle Artifacts for Heart Rate Variability Analysis, IEEE International Symposium on Signal Processing and Information Technology, Spain, December, 2011
[41] Rigas G., Goletsis Y., Bougia P., and Fotiadis D.I., Towards Driver's State Recognition on Real Driving Conditions, International Journal of Vehicular Technology, Article ID 617210, 14 pages, 2011.
[42] Montani S., Portinale L., Leonardi G. and Bellazzi R., Case-based retrieval to support the treatment of end stage renal failure patients, Artificial Intelligence in Medicine, Volume 37, Issue 1, pp 31-42, 2006.
[43] Zhou Z.h. Ensemble learning. Encyclopedia of Biometrics, Berlin: Springer, 2009, 270-273.
[44] Goldberger A.L, Amaral L.A.N, Hausdorff J.M., Ivanov P.C. and Peng C.K. Fractal dynamics in physiology: Alterations with disease and aging. Proceedings of the National Academy of Sciences of the United States of America, pp.2466-2472, 2002
[45] Perner P., Perner H., and S., Recognition of airborne fungi spores in digital microscopic images, International journal of Artificial Intelligence in Medicine, vol. 36, no. 2, pp. 137–157, 2006.
[46] Perner P., Flexible high-content analysis: automatic image analysis and image interpretation of cell pattern, Imaging & Microscopy, vol. 1, pp. 2–3, 2006.
[47] Begum S., Ahmed M.U., Funk P., Xiong N., Folke M., Case-Based Reasoning Systems in the Health Sciences: A Survey on Recent Trends and Developments, International journal of IEEE Transactions on Systems, Man, and Cybernetics-Part C: Applications and Reviews, vol 41, Issue 4, 2011, pp 421 - 434.
[48] Bichindaritz I. and Marling C., Case-based reasoning in the health sciences: What’s next? Artificial Intelligence in Medicine, Volume 36, Issue 2, pp 127-135, 2006.